北斗卫星导航系统静态精密单点定位精度分析
——以我国南部地区为例
2022-10-02 02:46朱强宋传峰刘思敏
地理空间信息 2022年9期
朱强,宋传峰,刘思敏
(1.广州市城市道路养护管理中心,广东 广州 510030;2.武汉大学 卫星导航定位技术研究中心,湖北 武汉 430079)
我国自主建设、独立运行的北斗导航卫星系统(BDS)已于2020年7月31号正式运行,并向全球用户提供服务[1]。目前已形成美国GPS、俄罗斯格洛纳斯(GLONASS)、欧洲伽利略卫星导航系统(Galileo)和中国BDS四大全球导航卫星系统(GNSS)共存的局面。相对于GPS、GLONASS和Galileo,BDS由地球静止轨道(GEO)卫星、倾斜地球同步轨道(IGSO)卫星和地球中轨道(MEO)卫星3种混合星座构成。BDS独特的星座结构设计,使其同时具备导航和通信功能,且可显著增强我国尤其是南部地区的定位能力。随着港珠澳大桥、粤港澳大湾区等重大国家工程或战略的实施,我国南部地区对卫星导航系统的服务需求日益增长。GNSS系统,尤其是BDS,将在大型基础设施变形监测、地理信息应用、海洋开发、石油探测[2-4]等方面发挥重要作用。
精密单点定位(PPP)具有全球无缝导航、应用成本相对低廉等显著优势。在南北极、海洋、沙漠、高原等特定区域,PPP更是控制测量、冰盖运动监测等应用的重要可选手段[5]。相对于双差处理模式(GAMIT软件采用该模式),非差数据处理模式具有处理速度快[6]、无需分网解算等优势,且具有一定的精度保证。Bernese、GIPSY、PANDA等GNSS数据处理软件均支持非差数据解算[7]。已有大量文献对GPS与BDS的PPP模型和算法进行了研究和分析[8-10];但鲜有文献从实际应用的角度对GPS与BDS的PPP进行分析和比较,尤其是针对我国南部地区GPS、BDS的PPP服务性能评价更是相对空白。目前,我国实际工程应用较多的仍为GPS,BDS的实际应用能力需进一步评价和分析。
针对上述现状,本文选择我国南部沿海某工程的3座B级GNSS观测站数据进行处理和分析,点号命名为B001、B002和B003,其中B001点可同时跟踪BDS-2和BDS-3信号,B002点和B003点暂时无法跟踪BDS-3信号。本文首先从24 h(单天)和2 h观测数据时长的角度出发,分别对GPS、BDS及其GPS/BDS组合的静态PPP应用性能进行评估;然后分析PPP计算的CGCS2000坐标精度,可为实际工程应用提供参考。
1 PPP数学模型
本文主要介绍GPS、BDS及其组合PPP的定位模型和数学推导,包括函数模型和随机模型。
1.1 函数模型
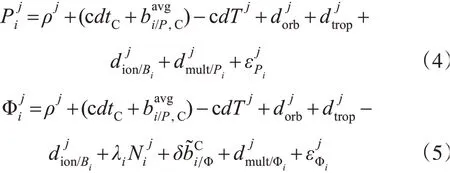
对于BDS卫星j,接收机在B1和B3频率(精密轨道和精密钟差产品基于该频率观测数据生成)上的伪距和载波相位观测值[11]为:

式中,Pi、Φi分别为Bi频率的伪距和已转换为距离的载波相位观测值,单位为m;ρ为站星间几何距离,单位为m;c为光速,单位为m/s;dtC、dT分别为接收机钟差和卫星钟差,单位为s;C为BDS;dorb、dtrop分别为卫星轨道误差和对流层延迟,单位为m;dion/Bi、λi分别为Bi频率上的电离层延迟和波长,单位为m;Ni为Bi频率的相位模糊度,单位为周;分别为Bi频率上伪距和载波相位的多路径效应,单位为m;分别为Bi频率上伪距和载波相位的硬件延迟,单位为m;ε为观测噪声,单位为m。
由于包含接收机和卫星的初始相位延迟,相位模糊度Ni并不是整数;且考虑到精密卫星钟差产品中包含了卫星端的硬件延迟[12],观测值方程中仅考虑接收机端硬件延迟即可。BDS卫星使用码分多址,接收机对每颗卫星的硬件延迟相同,因此观测方程中的硬件延迟项可表示为:

类似的,对于GPS卫星k,接收机在L1和L2频率上的伪距和载波相位观测值可表示为:

式中,G为GPS卫星;λi为Li频率上的波长,单位为m。
经GPS和BDS精密轨道和精密钟差改正并忽略多路径效应后,伪距和载波相位消电离层组合观测值为:

式中,PIF和ΦIF分别为伪距和载波相位消电离层组合观测值,单位为m;NIF为消电离层组合模糊度。


式中,为接收机钟差和伪距硬件延迟组合;为模糊度和伪距相位硬件延迟差的组合。
GPS与BDS组合定位时,可将BDS的接收机钟差表示为[13]:

式中,为接收机GPS时与BDS时的系统偏差,在短时期(单天)内可认为是一稳定值。
此时,BDS观测方程为:

式(12)、式(13)为GPS的PPP函数模型,式(14)、式(15)为BDS的PPP函数模型,式(12)、式(13)、式(17)、式(18)为GPS/BDS组合的PPP函数模型。组合PPP的未知参数包括3个测站位置、1个接收机钟差、1个系统偏差、1个对流层延迟和多个模糊度参数。
1.2 随机模型

给定先验单位权中误差σ0,则观测方程的权为:

值得注意的是,由于北斗GEO卫星的轨道和钟差精度较低[5],为了获得高精度定位结果,在数据处理中应适当降低GEO卫星的权。
2 数据来源与处理软件
本文PPP数据处理采用自主研发的GNSS数据处理软件。该软件支持多频多系统数据处理,具备精密星历与钟差产品编辑、PPP、轨道积分与拟合等功能。我国南部地区更靠近赤道,因此电离层较北部地区活跃。本文采用南部地区的观测数据进行处理和分析,结果更具普适性。本文数据来源于我国南部沿海某工程的3座B级GNSS观测站(B001、B002和B003),站点分布如图1所示。3座测站的观测日期均为2019年第316—318天(年积日316-318),采样间隔为15 s,同时跟踪GPS与BDS卫星信号。3座测站均采用TRIMBLE接收机和天线,详细信息如表1所示。

图1 站点分布图

表1 测站观测设备信息表
数据处理时,GPS采用L1和L2双频信号,BDS采用B1和B3双频信号。由于BDS-3卫星保留了BDS-2卫星观测信号[14],因此本文将BDS-2与BDS-3卫星进行等同联合处理(B001测站)。在PPP时,需已知精密星历和精密钟差产品,而观测期间IGS分析中心中仅武汉大学提供BDS-3卫星的精密星历和钟差产品(WUM),因此选用该分析中心产品进行PPP解算。
3 定位结果分析
本节主要对3座测站单天观测数据和2 h观测数据的GPS、BDS、GPS/BDS组合PPP定位结果进行分析,并对PPP计算的CGCS2000坐标精度进行评估。
3.1 单天观测数据
当测站具有多天观测数据时,受观测误差、模型误差以及其他已知数据误差的影响,不同天PPP结果会有差异。这种差异可作为评价单天PPP精度的指标之一,即多天PPP解的坐标重复性(自定义):

式中,ci为各时段解的坐标分量;为相应分量的协方差;cˉ为相应坐标分量的加权平均值;R为相应的重复性。
3座测站均具有3 d观测数据,可获得3个单天PPP解。3座测站在3种处理模式下的单天PPP各坐标分量重复性如表2所示,可以看出,各测站在3种处理模式下各分量重复性均较好,平面分量(N、E)重复性小于5 mm,高程分量重复性小于1.5 cm;BDS高程分量重复性略差于GPS,这与目前仍没有精确的BDS接收机PCO与PCV校正模型有关;GPS/BDS组合解的平面重复性略有提高,高程重复性处于单GPS与单BDS之间。

表2单天PPP坐标分量重复性/cm
除坐标重复性外,GPS与BDS两种不同技术的PPP处理结果符合性也可作为评价PPP精度的指标。本文将各测站3 d的加权平均值作为最终结果,对比了3座测站GPS与BDS定位结果的差值,如表3所示,可以看出,3座测站平面坐标分量差值较小,除B003点的东西(E)分量超过1 cm外,其他均为毫米量级;3座测站平面坐标分量差值的平均值也为毫米量级;各测站高程分量符合性弱于平面,3座测站高程分量差值的平均值约为1.6 cm。

表3 GPS与BDS单天PPP结果差值/cm
由上述分析可知,无论是GPS、BDS还是GPS/BDS组合解的单天PPP精度均较高,平面可达毫米级,高程约为1~2 cm;无论是坐标重复性还是与GPS定位结果的差值,B001点的高程分量精度均明显优于B002点和B003点,其可能原因在于BDS-3卫星信号增强了星座几何结构。
3.2 2 h观测数据
本文将单天观测数据从UTC零点开始每隔2 h截取一段观测数据,每天可截取12段观测数据;分别对截取的观测数据进行PPP解算,得到2 h的PPP结果;再将GPS/BDS组合单天解加权平均值作为真值,通过比较2 h解与真值的差异,评价2 h解的定位精度。
3座测站第316天在GPS、BDS、GPS/BDS组合3种处理模式下2 h观测数据的PPP结果与真值的坐标差值均方根(RMS)所有时段的平均值如表4所示,可以看出,GPS、BDS单系统2 h观测数据的PPP精度平面分量一般小于4 cm,高程分量GPS小于5 cm,BDS较差约为7.5 cm,这可能与2 h时长的数据观测量不足有关;GPS/BDS组合解定位精度明显提高,各时段平均RMS平面分量小于2 cm,高程分量小于3 cm。受篇幅限制,本文仅展示了GPS/BDS组合PPP各时段定位结果的RMS(图2),可以看出,分时段解与时段无明显相关性,所有时段解的平面分量RMS均小于3 cm,高程分量除第10时段(19:00—20:00 UTC)略大于6 cm外,其他时段均小于5 cm。

表4 2 h观测数据的PPP结果时段平均RMS/cm

图2 GPS/BDS组合PPP各时段定位结果
3.3 CGCS2000坐标
我国目前已全面启用CGCS2000坐标系,评价PPP获得的CGCS2000坐标计算精度更具有实用性。本文PPP解算直接得到的是ITRF14框架、瞬时历元坐标,而CGCS2000采用的是ITRF97框架、2000.0历元。因此,对PPP解算结果进行框架转换和历元转换,可得到CGCS2000坐标。本文采用IERS的框架转换参数和由华南板块运动模型计算得到的测站速度场,获得了测站的CGCS2000坐标。
本文PPP计算得到的CGCS2000坐标(GPS/BDS组合单天解加权平均值)与已知坐标的坐标分量差值如表5所示,该差值主要由PPP计算的ITRF14框架下坐标误差、框架转换误差、历元转换误差和已知坐标误差引起,可以看出,PPP计算得到的CGCS2000坐标综合误差平面分量与高程分量均小于5 cm;3座测站N分量与E分量差值均成系统性,这主要由历元归算时测站速度场误差引起,证实了测站速度场精度对结果影响显著。
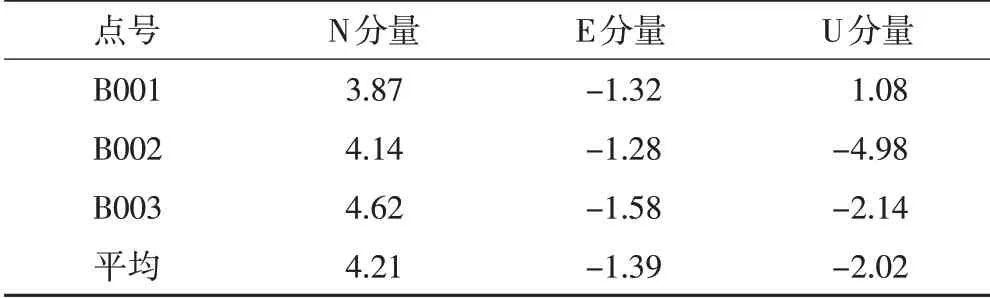
表5 PPP计算得到的CGCS2000坐标与已知坐标差值/cm
受限于板块运动模型计算的测站速度场精度,PPP计算得到的CGCS2000坐标精度低于ITRF14框架下的坐标精度。若能通过CORS站等方式得到更精确的测站速度场,则可进一步提高PPP获得的CGCS2000坐标解算精度。
4 结语
本文介绍了GPS/BDS组合PPP的数学模型,并采用GPS、BDS、GPS/BDS组合3种PPP处理模式对我国南部地区3座GNSS观测站数据进行了处理分析。结果表明,在ITRF框架下,单天解定位结果3种处理模式平面精度均可达毫米级,高程精度约为1~2 cm;2 h观测数据处理结果精度略差,GPS平面与高程精度均小于5 cm,BDS平面精度小于5 cm,高程精度约为7 cm,而GPS/BDS组合解精度明显提高,平面精度可达2 cm,高程精度为3 cm。PPP解转换至CGCS2000框架下的平面与高程坐标精度均小于5 cm。因此,在实际数据处理中,对于单天数据可采用单GPS、单BDS或GPS/BDS组合PPP结果;对于2 h或更短的观测数据,建议采用GPS/BDS组合定位。若应用中要求精度较高的CGCS2000坐标,则需获取精确的测站速度场以消除转换过程中的系统差。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
测绘地理信息(2022年2期)2022-04-02
昆钢科技(2021年2期)2021-07-22
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
导航定位学报(2018年3期)2018-09-03
考试周刊(2016年94期)2016-12-12
载人航天(2016年4期)2016-12-01
导航定位学报(2013年1期)2013-07-25