基于重复控制的无差拍光伏并网逆变器设计
2022-09-30 00:59王金玉朱晨阳孔德健
吉林大学学报(信息科学版) 2022年3期
王金玉,朱晨阳,孔德健
(1.东北石油大学 电气信息工程学院,黑龙江 大庆 163318;2.国网冀北电力有限公司 检修分公司,北京 102400)
0 引 言
风能和光伏能源等可再生能源是减轻化石燃料燃烧造成污染的最佳解决方案。电流控制器使并网逆变器能根据其要求向电网注入有功和无功功率[1-2]。优良的控制策略可以提高并网电能质量,减少开关频率及损耗[3]。目前,电流控制器使用可变频率调制器,例如滞环和PI(Proportional Integral)控制器。由于变化的开关频率可导致谐振问题,这是滞环控制的主要缺点,同时开关损耗也限制了其在低功率领域的应用范围[4]。随着微处理器技术和计算速度的不断提高,人们提出了适用于功率变换器的新型控制方案,如模糊逻辑控制、滑模变结构控制和采用PWM(Pulse Width Modulation)的无差拍控制。
传统无差拍控制器快速的动态响应以及可使用任何调制方式而被广泛应用[5]。但其在基本实施过程中对负载参数的变化十分敏感[6],会给系统带来较大的控制误差,从而影响电流控制精度和系统响应速度。为提高控制器性能并克服传统无差拍控制器的限制,He等[7]提出了一种改进的加权电流平均控制的无差拍控制方法,并将电网电压前馈补偿加入到平均电流参考值中减小稳态电流跟踪误差,但并网电流的THD(Total Harmonic Distortion)受电网电压影响较大。Pichan等[8]针对三相四桥臂的离网逆变控制采用考虑中线电感的无差拍预测控制,但在模型参数变化时会增大稳态误差。由于重复控制可以有效跟踪或消除周期性信号[9],因此在闭环系统应用的情况下以重复控制为基础的控制器是可以有效跟踪或消除任何周期信号,包括任何次谐波。由于其优越性能,笔者在传统无差拍控制中嵌入重复控制器,结合二者优势可实现对并网电流的快速准确跟踪,有效降低了并网电流THD含量。
1 光伏并网逆变器数学模型
三相PWM逆变器主电路拓扑结构如图1所示。其中DC(Dirrect Current)总线电压UDC由可再生资源供电,并通过LCL滤波后连接电网。Ua,Ub,Uc分别为逆变器的三相输出电压;Uga,Ugb,Ugc分别为三相并网电压;iaL,ibL,icL分别为三相输出电流;C为直流母线电容;主电路中的L1,L2分别为逆变器侧电感和电网侧电感,可以抑制调制、死区、零阶保持器等产生的谐波;R为电感电阻和功率器件损耗的等效电阻Rs的和;R1为电感L1的等效电阻。

图1 三相PWM逆变器主电路图Fig.1 Main circuit diagram of three-phase PWM inverter
无差拍控制结构图如图2所示,其中包括坐标变换模块,无差拍控制模块以及脉宽调制信号发生器。
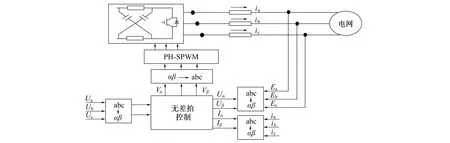
图2 三相PWM逆变器无差拍控制结构图Fig.2 Structure diagram of deadbeat control of three-phase PWM inverter
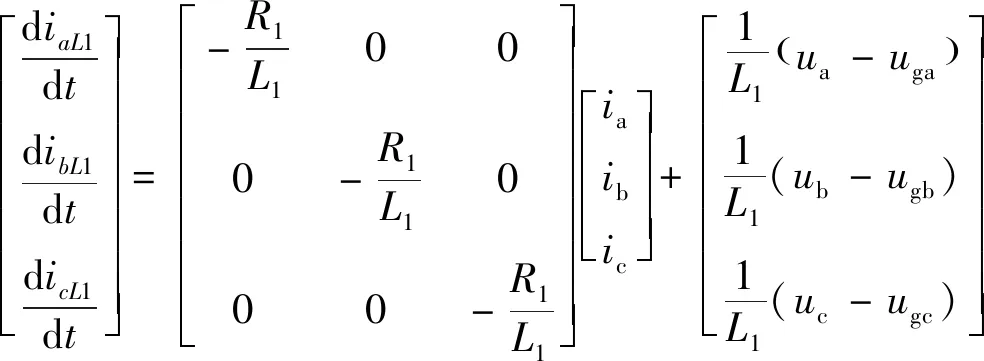
根据三相对称系统基尔霍夫电压定律,三相电路数学模型为

(1)
图1中LCL滤波器电容用于吸收高次谐波,考虑中低频模型时可将其忽略。由于控制的模型是中低频模型,因此,将LCL型滤波器简化为一阶系统[10],三相四桥臂并网逆变器的离散状态方程如下

(2)
2 光伏并网逆变器控制器设计
2.1 无差拍电流预测控制器原理
无差拍控制器属于预测控制器。预测控制量(电流)的变化,并在此基础上选取变换器的开关状态或通过脉宽调制预测变换器产生的平均电压[11]。该方法是通过变量导数预测控制作用的效果,控制器是在上述并网逆变器和滤波器模型的基础上,预测系统的动态性能,因此控制器对模型参数比较敏感。图3为三相并网逆变器无差拍控制原理图。

图3 三相并网逆变器无差拍控制原理图Fig.3 Principle diagram of deadbeat control of three-phase grid connected inverter
控制器状态空间矩阵
(3)
其中ia,ib,ic为状态变量。
将式(3)离散化处理,采样周期为T,若系统考虑的采样频率足够大(fs/f≫20),则可以采用反向逼近,并从采样变量中估计存在于连续时域中的导数如下
(4)
将式(4)代入式(3)得

(5)
经式(5)推导得

(6)
其中uga,ugb,ugc为三相电网电压,ua,ub,uc为逆变器的输出电压,r为电感L的阻抗,ia,ib,ic为三相逆变器的输出电流。
稳态αβ坐标系下的电压方程为
(7)

(8)
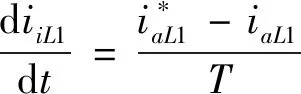
若在一个采样周期内实现了并网电流对给定参考电流的无差跟踪,则认为达到了无差拍的控制效果[12],即

(9)
通过使用

(10)
近似电流的导数进行离散化。其中Ts为采样时间,iα,β(k+1)为电流iα,β在k时刻的采样值。将式(7),式(8)代入式(10)得到

(11)

(12)

(13)
考虑到时间计算,为实时实现无差拍,需要使用式(12)和式(13)预测下一个采样时间的电流。
3 内模重复控制的改进型无差拍控制器
传统无差拍控制无法抑制周期性的扰动,基于内模原理(IMP:Internal Model Principle)的重复控制可利用误差的重复性逐周期修正输出信号[13]。根据内模原理,在反馈控制环节中若含有外部被控信号的数学模型,则可实现系统的零稳态误差跟踪,内模实际上是一个信号发生器[14]。对并网系统而言,其谐波信号的频率是基波信号频率的倍数,而且具有周期性。重复控制能很好地消除周期性扰动,实现对正弦信号的无差跟踪[15-16],理论上将传统无差拍控制与重复控制相结合可获得快速的动态响应及零稳态误差输出。
将重复控制器嵌入无差拍控制器中,得到内置重复控制器的无差拍控制结构,用于光伏并网逆变器的控制策略。
若不考虑延时则得到电流闭环传递函数

(14)

(15)
若将电网电压Ug(s)视为扰动,忽略电感内阻R1和R2,并网电流相对逆变侧输入电压的传递函数为

(16)
将表1中的逆变器参数代入式(15)得到被控对象的传递函数为

(17)
过高的增益会破坏系统的稳定性,采用惯性环节代替理想微分环节,用超前环节zk补偿理想微分环节的相位延时。陷波器和巴特沃斯滤波器的传递函数

(18)
补偿器S(z)设计为
S(z)=S1(z)S2(z)zk
(19)
加入补偿器抑制了谐振尖峰,其幅频特性和相频特性都优于传统无差拍控制。考虑k分别取值为0,1,2,3,4时的波特图如图4所示。图4a为k取不同值时的电路幅频特性,图4b为相频特性。由图4b可知,当k=0,1,2,3时,输入和输出信号相位差为0,当k=4时,相位差为3.456。当k=3时,相位补偿最好,所以选取补偿步数为3。
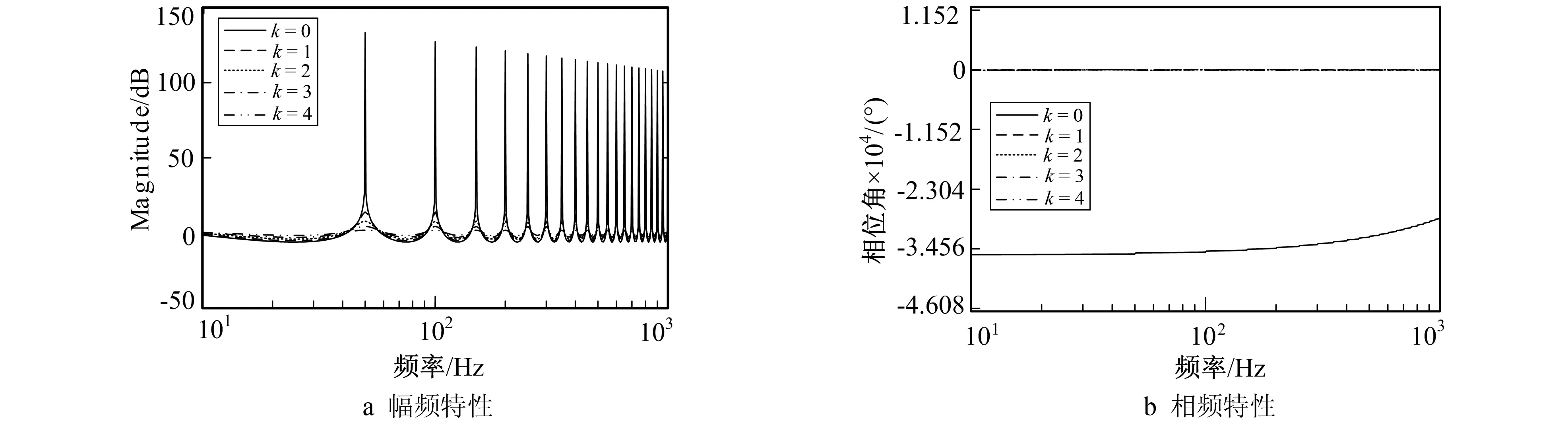
图4 k为不同拍数时波特图Fig.4 Different beats of k in the bode diagram
4 仿真验证
基于Matlab平台搭建三相四桥臂光伏并网逆变器拓扑结构及控制器模型,具体参数如表1所示。

表1 光伏并网逆变器参数Tab.1 Parameters of photovoltaic grid connected inverter
笔者从THD和并网电流动态响应速度两个指标,验证基于重复控制的无差拍控制策略动静态特性。图5为传统无差拍控制器的电压电流波形以及FFT(Fast Fourier Transformation)分析。经过FFT分析,传统无差拍控制方法输出电流THD在6.28%,含有较多高次谐波并不能对畸变进行有效抑制。
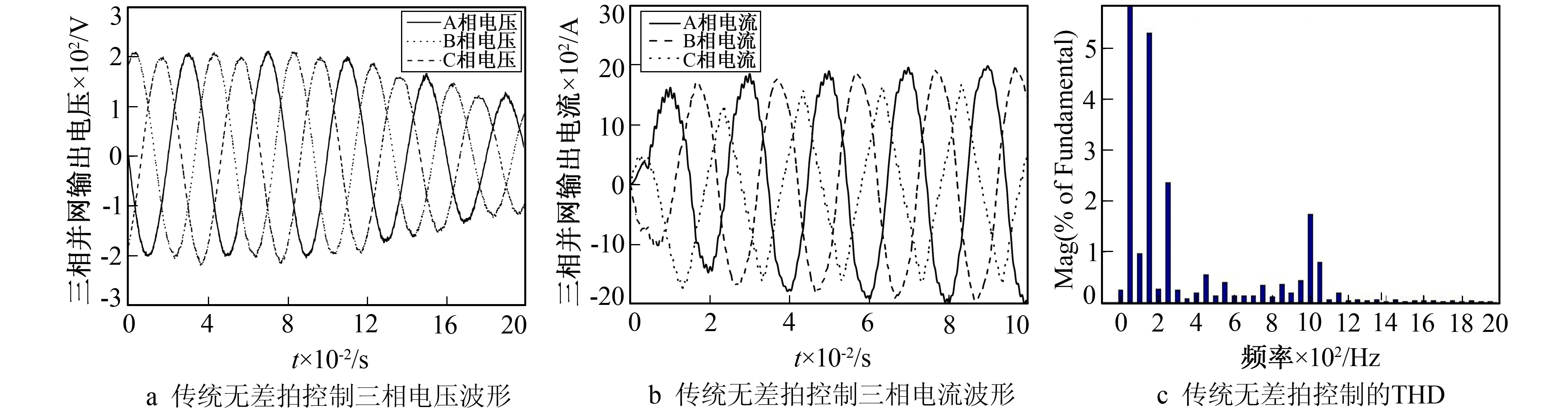
图5 传统无差拍控制策略并网仿真结果Fig.5 Simulation results of grid connection with traditional deadbeat control strategy
图6为插入重复控制的无差拍控制器应用于光伏并网逆变器中的仿真结果。图6a为三相并网输出电压波形。图6b为电流误差分析结果,将相位补偿步数选取为3时,在内模重复控制器作用下,基于重复控制的无差拍控制策略的A相电流误差呈周期性下降,电流跟随特性良好,稳态时并网误差可控制在0.5 A左右。将重复控制与传统无差拍控制相结合,有效抑制逆变系统的周期性扰动,谐波畸变率明显降低,提高逆变器性能。图6c为笔者采用的基于重复控制的无差拍控制策略的A相电压和电流的相位对比图,可以看出通过重复控制的超前相位补偿使电网电压和电流无相位差。

图6 插入重复控制的无差拍控制策略并网仿真结果Fig.6 Simulation results of deadbeat control strategy with repetitive control
由图6e可知,采用插入重复控制的无差拍控制策略时电流总畸变率较传统无差拍控制减小了0.11%,说明重复控制的加入减小了输出电流稳态误差。将图5c和图6e对比可以看出,插入重复控制的无差拍控制策略较传统无差拍控制策略抑制奇次谐波的效果更好。
实验还验证了重复控制与无差拍控制相结合的控制器的动态响应速度。图7为并网电流动态响应过程,在0.2 s时将并网电流从32 A上升到43 A,输出电流经过0.001 s跟随给定值。可以看出,动态响应速度良好,分析输出电流的谐波特性,结合重复控制的无差拍控制能有效减少并网电流THD,改善系统性能。

图7 重复控制与无差拍控制结合的动态响应波形图Fig.7 Dynamic response waveform of combination of repetitive control and deadbeat control
5 结 语
笔者针对三相四桥臂逆变器提出了基于重复控制
的无差拍控制策略,并分别从电流跟踪误差和并网动态响应速度两方面与传统无差拍控制比较,经系统模型搭建和仿真波形分析对比,得到基于无差拍控制策略有效地降低了电流谐波总畸变率,提高了并网电流响应速度。有效抑制传统控制方法采样延时带来的影响,重复控制方法的引入结合无差拍控制可进一步消除周期性扰动,降低稳态误差,降低并网电流THD,改善系统性能。需要注意的是笔者仅考虑中低频模型,从而将LCL滤波器简化为一阶系统,高频模型的控制策略控制效果有待验证。
猜你喜欢
遗传(2022年9期)2022-10-10
消费电子(2022年6期)2022-08-25
大电机技术(2022年3期)2022-08-06
防爆电机(2022年3期)2022-06-17
云南电力技术(2021年6期)2022-01-18
煤气与热力(2021年4期)2021-06-09
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
中华戏曲(2020年1期)2020-02-12
电子制作(2019年23期)2019-02-23