锂离子动力电池荷电状态监测仿真
2022-09-28 09:50程清伟姜立标
计算机仿真 2022年8期
程清伟,姜立标
(1. 广州城市理工学院汽车与交通工程学院,广东 广州 510800;2. 华南理工大学机械与汽车工程学院,广东 广州 510641)
1 引言
目前,为降低二氧化碳对环境产生的污染,新能源汽车得以迅速发展。动力电池为新能源汽车发展的关键。锂离子动力电池与普通汽车电池相比,具有寿命长、能量高的优势,被广泛的应用在新能源汽车中。电池的剩余容量可通过荷电状态描述,因此在电池管理系统中估计荷电状态是目前急需深入研究的重点问题。
许元武等人根据荷电状态的定义构建AH,并在AH中引入参数模型,在Takagi-Sugeno模糊模型原理的基础上结合EKF联合估计器监测电池的荷电状态。但是该方法忽略了构建电池模型,在荷电状态监测过程中的数据依据较少,在不同电池工况下的监测结果误差大,存在适用性差的问题。谈发明等人引入虚拟观测噪声补偿观测模型误差,在逆Wishart分布的基础上计算虚拟观测噪声对应的协方差,并在迭代过程中计算电池系统状态和噪声协方差相应的后验概率,根据计算结果更新状态,利用更新后的卡尔曼滤波完成电池荷电状态的监测,该方法获得的检测结果平均绝对误差大,降低了方法的整体有效性。张建文根据电池运行特点,对电池容量进行校正处理,利用温度、充放电倍率和老化程度等校正系数监测电池的荷电状态,该方法虽然可以实现电池荷电状态的监测,但运行时间过长,存在监测效率低的问题。
为了解决目前方法中存在的问题,提出锂离子动力电池荷电状态监测方法。
2 锂离子动力电池模型构建
锂离子动力电池内部存在复杂的化学反应,锂离子动力电池工作的外特性仅通过一组RC难以确定,为了提高准确性,需要多组并联的RC,但系统模型参数在复杂的运算中难以确定,因此所提方法选用2阶RC等效电路模型分析锂离子动力电池工作的外特性。
设置电容、、处的电压分别为1、2、,锂离子动力电池在放电过程中的电压为=+1+2+,其中代表电池初始电阻,代表流过电池的电流。锂离子动力电池在充电过程中的电压为=-1-2-。
当锂离子动力电池处于静止状态时,两个电容同时在电池中放电,经过一定时间后=。
通过上述分析获得锂离子动力电池电路模型中参数之间存在的关系
()=()-()-1()-2()
(1)
令=1、=2、=、=、=,将其代入上述公式中,构建状态空间(,)
(2)
式中的参数、、、可通过下述公式计算得到
(3)
所有测量参数在实际锂离子动力电池系统中都属于离散数据,因此需要离散化处理状态空间模型,令=+Δ、=Δ、=、=,考虑噪声对锂离子动力电池荷电状态监测产生的影响,引入观测噪声和过程激励噪声,设置1为系统的采样周期Δ,通过下述公式描述离散状态下电池的荷电状态空间

(4)
电池电量充满和电池电量很低的区段可充分体现锂离子动力电池荷电状态与电压之间存在的非线性关系。因此可以分段线性化处理锂离子动力电池的非线性关系,获得如下关系模型
(5)
式中,、、、、、均代表相关系数,用来衡量线性关系;代表锂离子动力电池荷电状态。
锂离子动力电池在结束充电以及开始充电时的区段通常较短,因此第二区段是其正常工作的区段,设置参数和,此时锂离子动力电池处于充电状态时的电压为()=++()+1()+2(),锂离子动力电池处于放电状态时的电压为()=+-()-1()-2()。
锂离子动力电池荷电状态监测方法通过电池充放电静置实验方法确定状态参数、,具体过程如下:
1)将锂离子动力电池在相同环境中进行电流的恒定放电,每放电5分钟记录锂离子动力电池的电压值,当电池电量完成放电后,获得相关数据。
2)按照恒定的电流在相同环境下对锂离子动力电池进行充电,每充电5分钟记录电池当前的电压值,直到电池完成充电。
3)在相同容量环境下将上述记录的数据绘制成曲线图。
4)在MATLAB平台中采用cftool对均值曲线数据进行拟合处理,此时()=+,根据上述公式获得参数、的值。
5)根据电流、电压曲线获取的相关信息估算锂离子动力电池的电阻参数和电容参数。
6)对电路零输入响应进行考虑,在电路放电段电压方程的基础上将锂离子动力电池电路方程转变为下式
=-()-()(1--)-()(1--)
(6)
式中,、代表电池电流常量。
由于电容在电池工作状态下会产生容抗作用,因此电路在电压出现跳变后会出现零输入响应,可用指数拟合函数=+-+-描述锂离子电动电池的电路,其中参数、、、、可通过cftool工具在MATLAB平台中计算得到。
3 荷电状态监测
锂离子动力电池荷电状态监测方法采用卡尔曼滤波算法监测电池的荷电状态。
传统卡尔曼滤波算法中状态变量对应的后验估计值和先验估计值是不断变化的。卡尔曼滤波在实际应用过程中受运算速度的影响,导致迭代精度下降。通过离散化处理可以提高运算效率,通过下述公式离散化处理观测方程和状态方程
(7)
式中,代表锂离子动力电池系统的状态变量;代表传递矩阵;为锂离子动力电池系统的输入;为锂离子动力电池系统输入误差引起的过程噪声;代表电池系统对应的前馈矩阵;代表锂离子动力电池系统的输出值;代表观测矩阵;代表测量噪声。

下述过程中上标“+”和“-”分别代表最优估算和预测估算


(8)
式中,代表初始状态变量,[]为其对应的方差。


(9)


(10)
4)用卡尔曼滤波增益矩阵表示测量结果的修正系数,该系数可利用预测值对应的偏离程度计算得到

(11)
其中,上角标为转置矩阵。


(12)


(13)
7)根据上述过程,进行迭代,完成预测。
根据上述卡尔曼滤波过程对锂离子动力电池荷电状态进行监测。
状态变量和根据基尔霍夫定律获得的如下微分方程
(14)
其中,代表锂离子动力电池的电流;为电池对应的电压;为电池对应的电容;为锂离子动力电池对应的电阻。
锂离子动力电池荷电状态监测方法采用安时积分法在2阶等效电路模型的基础上构建锂离子动力电池系统对应的离散状态方程
(15)
式中,代表锂离子动力电池的电压估计值。
在上式的基础上获得锂离子动力电池的输出方程
=--1,
(16)
式中,代表锂离子动力电池对应的初始电阻;代表时刻对应的电流;1,代表电容和电阻构成的并联电路在时刻对应的电压估计值。
通过上述过程获得锂离子动力电池系统的荷电测量矩阵、状态转移矩阵|-1和荷电状态向量完成锂离子动力电池荷电状态的监测
(17)
(18)
(19)
4 实验与分析
为验证锂离子动力电池荷电状态监测方法的整体有效性,需要对其进行相关测试。
在周期性脉冲工况、恒流放电工况以及恒流充电工况下采用锂离子动力电池荷电状态监测方法、文献[3]提出的基于变参数模型的锂电池荷电状态观测方法和文献[4]提出的观测模型误差不确定的锂电池状态监测方法,测试充放能量指标,结果如图1。
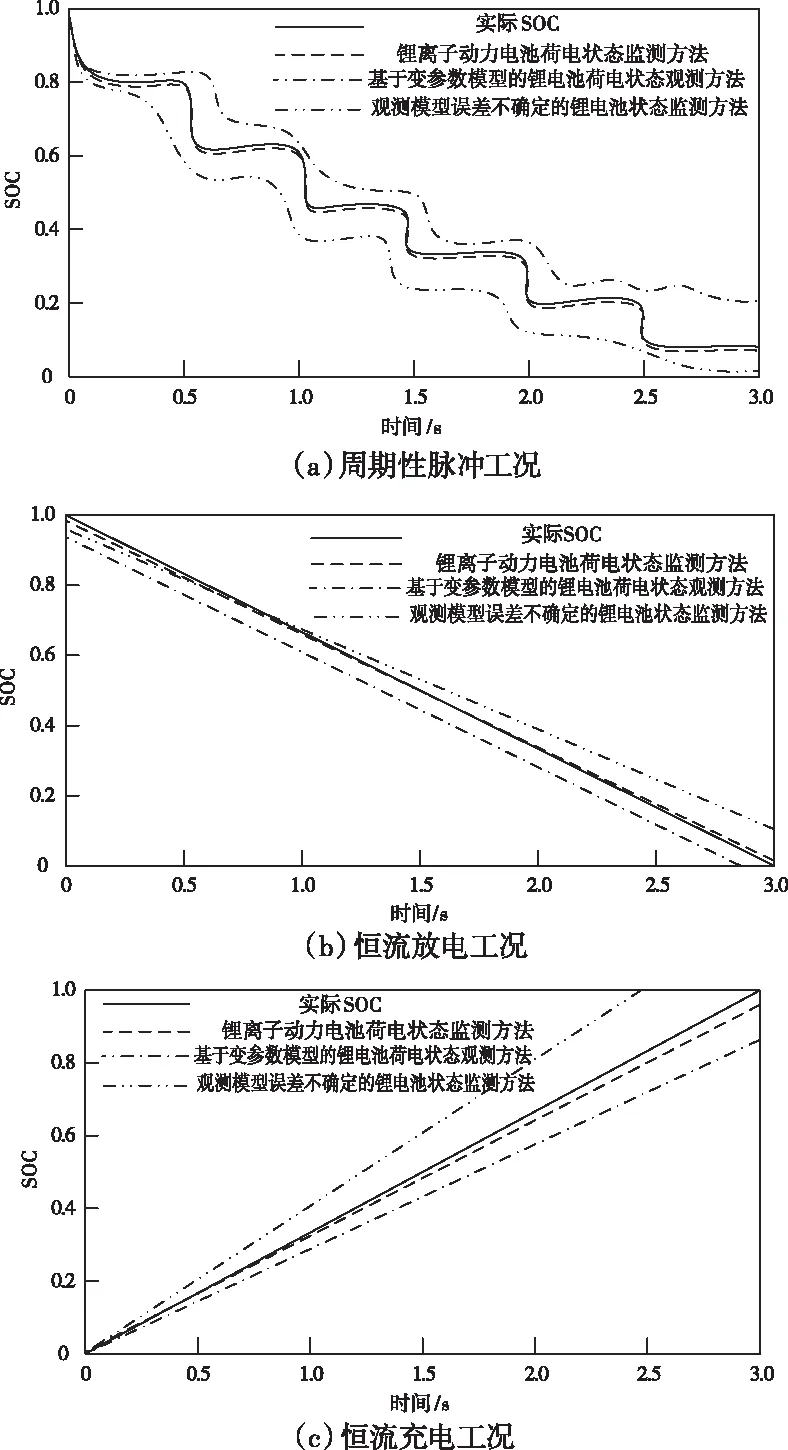
图1 不同工况下的SOC监测结果
分析图1可知,在周期性脉冲工况、恒流放电工况以及恒流充电工况下采用锂离子动力电池荷电状态监测方法获得的电池荷电状态监测结果与实际荷电状态基本相符,采用基于变参数模型的锂电池荷电状态观测方法和观测模型误差不确定的锂电池状态监测方法获得的电池荷电状态监测结果与实际荷电状态之间的偏差较大,通过对比可知,锂离子动力电池荷电状态监测方法可在不同工况下可准确的完成锂离子动力电池荷电状态的监测,因为该方法在监测之前构建了锂离子动力电池模型,根据锂离子动力电池模型分析电池在充电和放电状态下的荷电特性,可在不同工况下完成电池荷电状态的监测,提高了方法的适用性。
将平均绝对误差作为测试指标,进一步测试上述三种方法的监测误差,结果如图2所示。
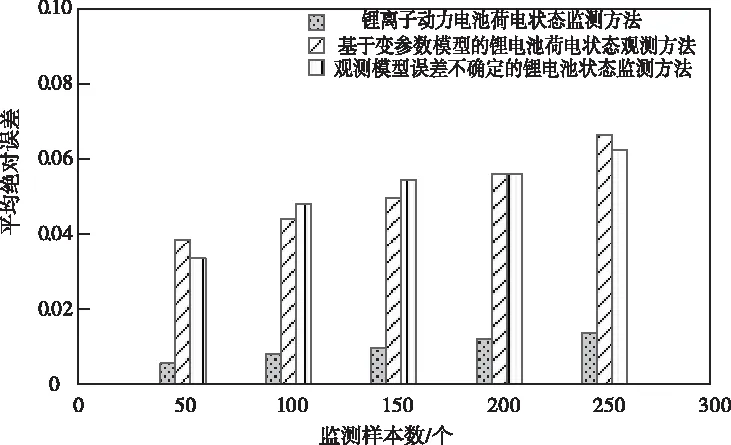
图2 不同方法的平均绝对误差
根据图2中的数据可知,采用不同方法对电池荷电状态进行监测时,随着监测样本不断增加,锂离子动力电池荷电状态监测方法、基于变参数模型的锂电池荷电状态观测方法和观测模型误差不确定的锂电池状态监测方法的平均绝对误差也不断增加,但研究提出的锂离子动力电池荷电状态监测方法监测结果的平均绝对误差始终保持在002以内,基于变参数模型的锂电池荷电状态观测方法和观测模型误差不确定的锂电池状态监测方法监测结果的平均绝对误差相比之下较高,验证了锂离子动力电池荷电状态监测方法的监测有效性。
分别采用锂离子动力电池荷电状态监测方法、基于变参数模型的锂电池荷电状态观测方法和观测模型误差不确定的锂电池状态监测方法进行电池荷电状态进行监测,对比不同方法的运行时间,测试结果如表1所示。
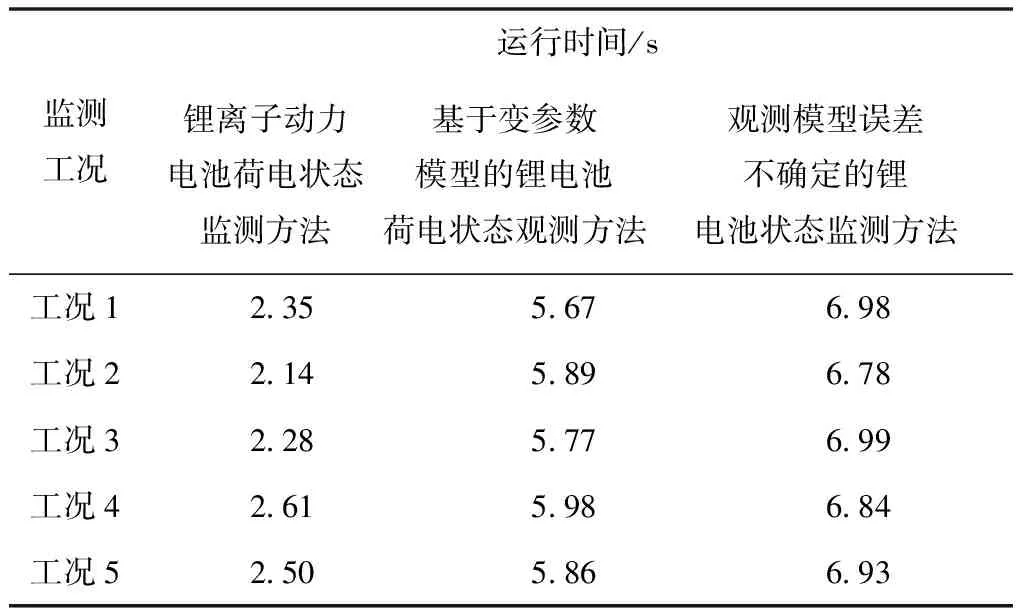
表1 不同方法的运行时间
分析表1中的数据可知,在不同工况下,采用锂离子动力电池荷电状态监测方法对电池的荷电状态监测时,监测时间均保持在3s内,基于变参数模型的锂电池荷电状态观测方法的运行时间在5s附近波动,观测模型误差不确定的锂电池状态监测方法的运行时间接近7s,通过上述分析可知,在电池荷电状态监测测试中,研究方法的运行时间最短。
5 结束语
目前电池荷电状态监测方法存在适用性差、平均绝对误差大和运行时间长的问题,提出锂离子动力电池荷电状态监测方法,采用卡尔曼滤波算法在电池模型的基础上实现荷电状态的监测,解决了目前方法中存在的问题,为新能源电动汽车的供电提供了保障。
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车工程学报(2022年5期)2022-10-12
汽车实用技术(2022年16期)2022-09-03
煤气与热力(2022年4期)2022-05-23
装备环境工程(2022年4期)2022-05-06
科学与财富(2021年33期)2021-05-10
舰船科学技术(2021年12期)2021-03-29
晚晴(2020年7期)2020-12-03
理科考试研究·高中(2019年7期)2019-09-17
智富时代(2018年8期)2018-09-28