
无人机电磁弹射用直线感应电机电磁推力分析
2022-09-28 09:28:28刘希军高丽霞谭壹方
计算机仿真 2022年8期
刘希军,崔 哲,高丽霞,谭壹方
(中国民用航空飞行学院,四川 广汉 618307)
1 引言
随着科学技术的发展,固定翼无人机已经广泛运用到农业、林业、军事、消防等各个领域。固定翼无人机加速起飞方式通常主要有火箭助推,液压喷射和气动喷射三种模式。火箭助推式能量消耗大,危险性高,对环境影响大,且无人机加速起飞受到的波动影响较大。液压喷射和气动喷射需要大量的管路,阀门和储能器等装置,设备系统复杂且所占空间较大,设备维护工作繁琐。
电磁弹射技术是目前发展较为迅速的一种加速驱动方式。电磁弹射采用直线电机作为驱动设备,将电能转换成直线电机的电磁推力输出,电磁推力大小与电流相关,通过控制电源电流控制电机能量输出,进而控制轻型或者重型固定翼无人机完成加速弹射起飞任务。电磁弹射系统推力输出易于控制,能量损耗低,且重量轻,空间小,易于维护,具有更优越的性能。
目前我国已经完成导轨式电磁发射装置以及电热式发射装置的设计研制,针对轨道炮的结构和性能问题,线圈炮的电枢在电磁荷载作用下的弹性屈曲问题进行了分析研究,并建立了有限元仿真模型进行仿真分析。但针对直线感应电机在固定翼无人机加速弹射方面的分析研究较少,多以液压和气动加速的仿真分析为主。本文仿真分析电磁弹射在无人机加速起飞时的电磁推力输出特性,完成加速指标,为电磁弹射取代液压、气动驱动无人机加速奠定理论基础。
本文根据单边直线电机T型等效电路,考虑端部效应对电机的损耗,推导直线感应电机电磁推力的输出表达式,寻找滑差频率和推力输出的关系,优化滑差频率,增大直线感应电机推力输出,进而满足固定翼无人机弹射加速指标要求。
2 弹射用直线感应电机模型
固定翼无人机弹射用直线感应电机结构图如图1所示。
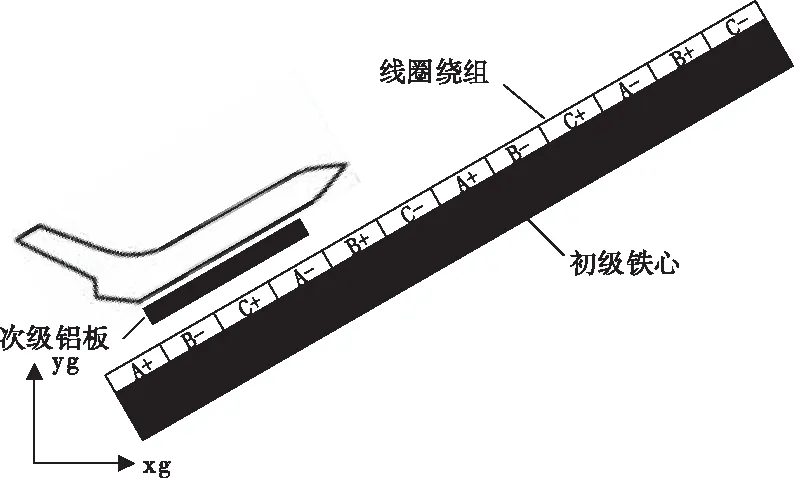
图1 弹射用直线感应电机结构图
电磁弹射驱动固定翼无人机用直线感应电机定子绕组无齿槽,无齿槽结构可以减小齿谐波磁场对电磁推力输出的影响。直线感应电机的次级为铝材料,利于产生电磁推力输出。
建立电磁弹射用考虑边端效应影响的直线感应电机T型电路,其中,边端效应对直线感应电机的影响可利用等效电阻等效,如图2。边端效应损耗作为等效电路因素,引入到等效电路中进行计算推导,进而计算出电磁弹射用直线感应电机电磁推力及特性表达式。
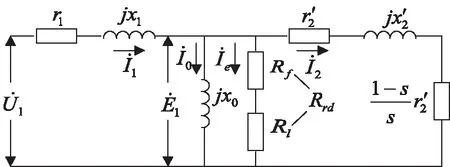
图2 直线感应电机T型等效电路示意图

(1)
(2)

(3)
式中
(4)
电机次级宽度、电机次级厚度,电阻率值;电机初级相匝数;极对数;电机极距。
可根据基尔霍夫电压定律和基尔霍夫电流定律推导型等值电路各参量关系,进而推导直线感应电机电磁推力输出。
3 直线感应电机电磁推力分析
固定翼无人机驱动加速电磁推力输出分析根据型等效电路和基尔霍夫定律,采用同步功率计算法推导直线感应电机输出电磁推力。
基尔霍夫电压定律

(5)

(6)
(7)
基尔霍夫电流定律

(8)
中心区域电磁推力输出为
(9)
边端区域电磁推力输出为
(10)
中心区域电磁推力和边端区域电磁推力之和共同形成了直线感应电机输出电磁驱动力。

(11)
式中电机相数;电机同步速度,=2·,额定频率。
初级绕组感应电动势可由初级相电压表示,两者之间满足关系式为
(12)
其中,=+,=′+′,初级绕组相阻抗,和分别为初级绕组相电阻和相漏电抗;次级绕组相阻抗,′和′分别为次级等效电阻和等效电抗。
结合上述各式推导电磁推力输出表达式为

(13)
式(13)对求偏导,并令∂∂=0,可求得电机获得最大电磁推力时对应的滑差率
(14)
滑差频率与额定频率、滑差率存在关系
(15)
进而可得直线感应电机获取最大电磁推力时的滑差频率,通过控制滑差频率控制直线感应电机电磁推力的输出。
4 弹射指标及电机参数分析
采用直线感应电机完成固定翼无人机弹射加速。弹射过程无人机无动力输出,完全由直线电机提供弹射动力。弹射指标为无人机及载荷量40kg内,无人机从0km/h加速到100km/h,弹射轨道长度5m。弹射发射角度60°内可调。无人机电磁弹射模型如图3所示。
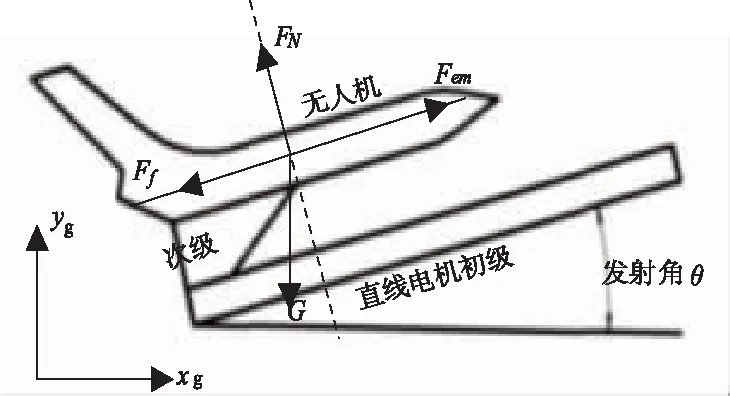
图3 无人机电磁弹射模型图
为直线感应电机电磁推力输出;为无人机受到的阻力,阻力相对于电磁弹力较小,为了简化计算,忽略不计;为固定翼无人机及电机滑块总重量;为电机滑块对无人机支持力,为弹射角度。
根据运动学公式及牛顿运动学定律
(16)
(17)
(18)
其中,、、和分别为无人机加速的末速度,加速轨道长度,和无人机加速时间;为固定翼无人机沿电机次级轨道方向所受合力
=-(sin+)
(19)
忽略空气阻力的影响,并以发射角30°计算电磁推力输出,欲完成固定翼无人机弹射指标要求,直线感应电机电磁推力输出至少为309kN。固定翼无人机弹射加速需求如表1。
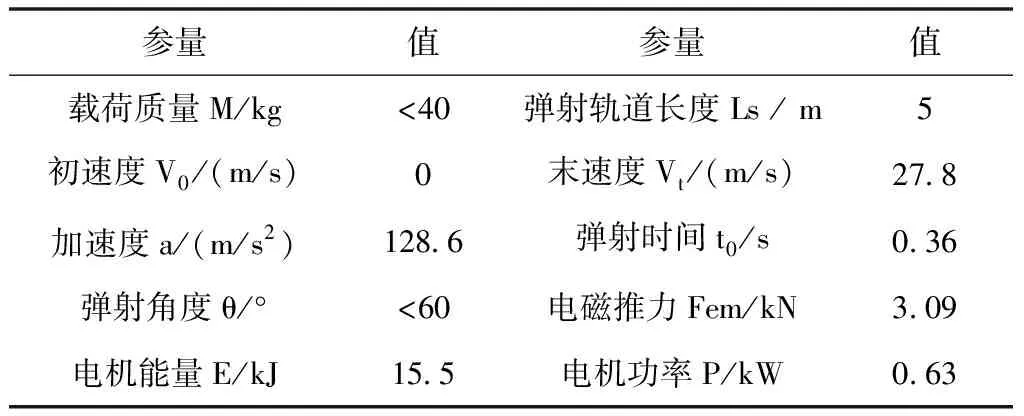
表1 固定翼无人机加速技术要求
为满足固定翼无人机电磁弹射指标所需电磁推力需求,设计直线感应电机参数如表2所示。
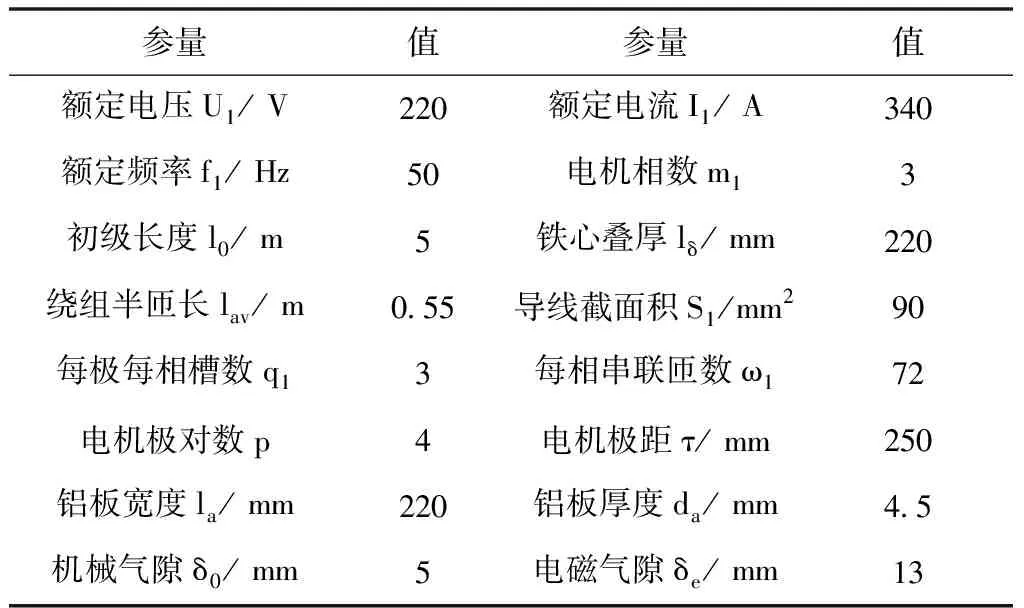
表2 直线电机参量值设计
初级绕组相电阻和相漏电抗和,次级等效电阻和等效电抗′和′,可通过电机设计参量表示。
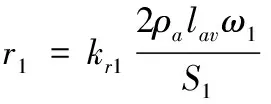
(20)
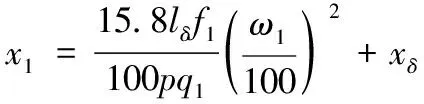
(21)
式(20)中,1为电阻增长系数,取值1=1;为初级绕组每相串联匝数;为导线横截面积值;为铝材料电阻率;为初级绕组平均半匝长度,=+,为初级铁心叠厚,为初级绕组端部长度,值相较于较小,可用初级铁心叠厚值代替。
式(21)中,为电机每极每相槽数;为气隙基波漏电抗。
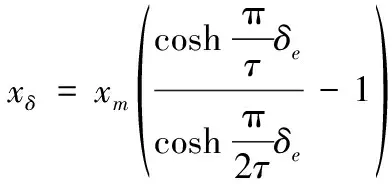
(22)
其中为励磁电抗
(23)
为压降系数,值为035~085;基波绕组系数,简化分析计算,=1;为气隙行波磁动势幅值
(24)
其中,和分别为初级额定电压值和额定电流值。
(25)

(26)
式中,为电机次级铝板厚度;集肤效应系数,简化分析计算,=1。
励磁电抗为
(27)
通过上述各式即可推导出直线感应电机设计参量和电磁推力输出和滑差频率的关系,进而可以推导最大电磁推力下的最优滑差频率。
5 滑差频率对电磁推力输出影响仿真分析
根据弹射驱动用直线感应电机模型,仿真分析滑差频率对电磁推力输出影响,并寻求最优滑差频率。图4为恒定直线感应电机定子电流的条件下,不同滑差频率下,弹射速度与电磁推力输出关系。
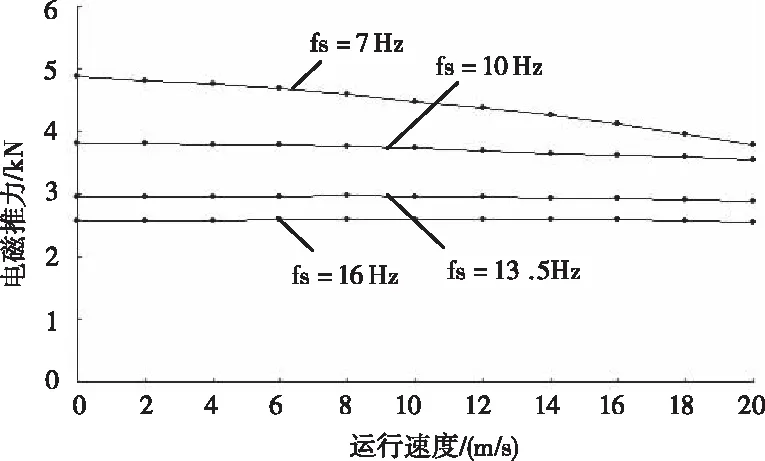
图4 不同滑差频率下弹射速度与电磁推力关系
固定滑差频率,滑差频率较大时,直线感应电机的电磁推力输出,随运行速度的改变基本保持恒定不变;滑差频率较小时,电机产生的电磁推力输出较大,但随着运行速度的增加,电磁推力输出减小,易受运行速度影响。
如图5所示,仿真分析恒流恒滑差频率下,不同运行速度下,滑差频率与电磁推力输出关系。
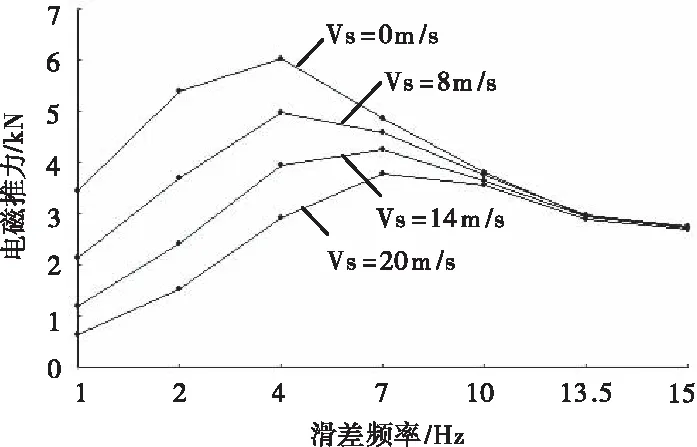
图5 不同速度下滑差频率与推力输出关系
运行速度为某一数值时,随着滑差频率的增加,电机电磁推力输出先增大后减小,滑差频率较小时,电磁推力输出波动较大,滑差频率增加到13Hz后,电磁推力输出基本恒定,基本不受运行速度的影响。
不同运行速度下,滑差频率对应的具体直线感应电机电磁推力输出值如表3所示。
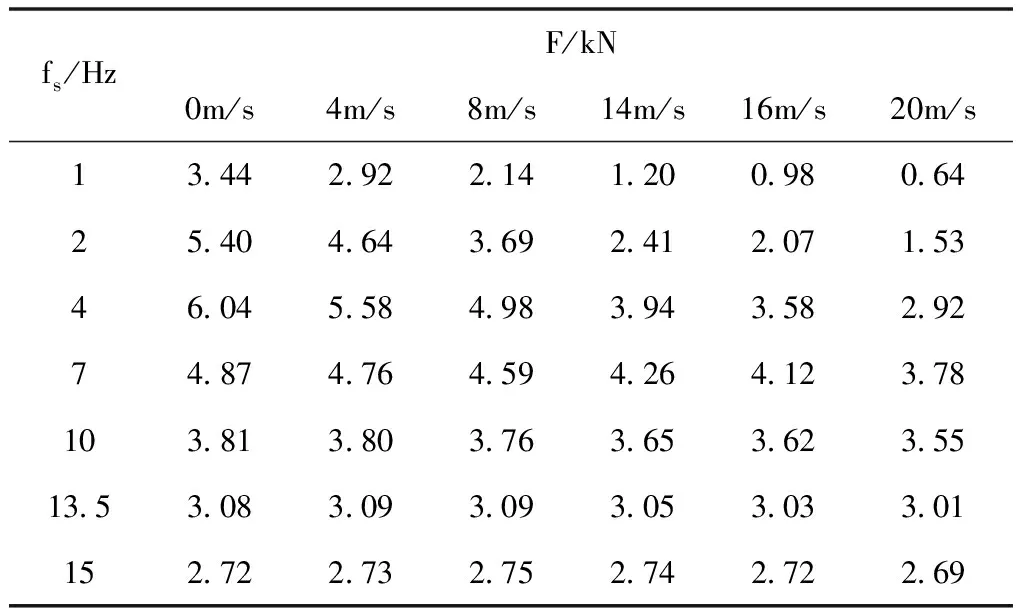
表3 电磁推力输出与滑差率关系
从表中可分析,滑差频率取值13.5Hz时,随着运行速度的变化,电磁推力输出基本恒定不变,基本恒定在3.0 kN-3.1kN,满足无人机弹射所需电磁推力输出值的需求,足以满足固定翼无人机可完成加速驱动。本设计采用滑差频率13.5Hz完成加速弹射。
固定翼无人机弹射加速用直线感应电机的悬浮气隙是电机电磁推力输出的关键因素,过小的气隙加工过程难以实现,较大的气隙不足以产生弹射所需的电磁推力输出。仿真分析运行速度分别为4m/s和16m/s时,不同电磁气隙情况下,滑差率对电磁推力输出的影响如图6、图7所示。
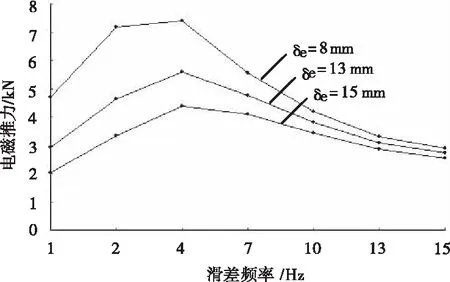
图6 4m/s时不同电磁气隙下滑差频率与电磁推力输出关系

图7 16m/s时不同电磁气隙下滑差频率与电磁推力输出关系
从电磁气隙和电磁推力仿真分析图中可验证,电磁气隙越大,电机电磁推力输出越小,二者成反比例关系。气隙越小,推力输出波动也更加明显,尤其在低速的时候,这种波动愈加明显。
固定翼无人机加速过程为匀加速过程,需要保持电机电磁推力输出不因速度改变而波动,因而选取电机的电磁气隙为13,滑差频率135,不同运行速度下电磁推力输出基本恒定,足以满足电磁弹射电磁推力输出需求。
6 结束语
本文根据固定翼无人机弹射加速指标要求,设计一种用于弹射驱动用直线感应电机,仿真分析滑差频率对电磁推力输出影响。由具体的电机设计参量,建立仿真分析模型,分析在不同电磁气隙,不同运行速度的情况下,滑差频率对电磁推力输出的影响,本设计最终确定滑差频率为135,电磁推力输出基本恒定在30-31,控制滑差频率值,进而控制电磁推力的输出,实现推力输出最优化控制,进而完成固定翼无人机加速弹射指标要求。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
上海大中型电机(2021年1期)2021-06-09 09:12:04
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
电子制作(2019年7期)2019-04-25 13:18:24
电子制作(2017年1期)2017-05-17 03:54:12
航空模型(2016年10期)2017-05-09 06:25:59
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
舰船科学技术(2016年1期)2016-02-27 15:39:22
