
基于模型驱动的羽毛球勾对角上肢运动生物力学研究
2022-09-26 03:36刘梓嘉周静芝彭玉鑫
广州体育学院学报 2022年2期
刘梓嘉,周静芝,张 玲,彭玉鑫
(浙江大学 教育学院,浙江 杭州 310058)
羽毛球运动是集耐力、灵敏、速度、力量、柔韧等综合素质为一体的技能主导项目。网前勾对角线球作为羽毛球网前主动进攻技术的一种,研究其背后的生物力学结构和神经肌肉控制,不仅能提高运动员的技战术水平,还可预防运动损伤的发生。对正反手勾对角的研究涉及到整个身体的动力链与运动学分析,包括肌肉、骨骼、关节间的相互配合。传统基于公式推导的生物力学分析难以从多维度描述整个运动,而基于动作捕捉系统的运动仿真建模可以在模型完善的情况下,借助正逆运动学还原运动员各动作中的骨骼-肌肉状态。
以往关于羽毛球运动生物力学的研究,主要借助动作捕捉系统与测力平台,对运动员的下肢姿态及受力同时进行分析[1-5],而对于上肢动作的研究则大多只包含小样本、单一技战术的运动学特征分析,未能良好地将其与动力学研究结合[6-10]。在传统生物力学的研究中,运动学特征参数的采集手段多种多样,包括但不局限于MEMS式、光电式、电磁式等,而动力学特征分析主要依赖于测力台所采集的地面反作用力(Ground Reaction Forces,GRF)。由于上肢没有接触地面,无法通过地反力获得各关节的运动力矩,便需要通过建立模型进行逆运动学仿真计算。人体骨骼肌肉仿真模型经历了不断的发展,从引入肌力、模拟肌肉系统的收缩动力学、解算人体状态轨迹[11],到将“肌肉Hill三元素模型”引入到生物力学求解并验证[12],再到将人体运动进行可视化重建,运用刚体动力学方法建立动力学模型[13]。近年来,随着生物力学理论的深入以及计算机技术的发展,一些人体骨肌系统仿真软件如Anybody[14]、OpenSim[15]等开始应用于动力学仿真和计算中。研究人员在提供合理的材料属性、边界条件等环境参量后,软件可以较为真实地反映人体运动状态下的运动学与动力学问题。当前的问题在于,在运动科学领域对人体骨骼肌系统建模主要集中在下肢及胸腰段关节,而对上肢关节的研究甚少。因此,仅通过现有模型无法对上肢活动为主的羽毛球的动作,尤其是正反手勾对角等技术动作进行深入探究。
本研究使用了已被证实信效度好[16-18]的Xsens MVN惯性动作捕捉系统,通过斯坦福大学的OpenSim仿真软件完善上肢骨肌系统建模,开发了一种能够估计多点触摸任务期间内部负荷的肌肉骨骼模型,旨在借助正逆运动学分析羽毛球不同水平人群网前正反手勾对角动作中上肢三大关节的和速度、关节角峰值、关节角幅值,分析关节力矩等动力学参数的差异性,量化上肢关节的空间特征差异。
1 研究对象与方法
1.1 实验对象
采用正手勾球的动作进行预试验,通过方差分析获得组间差异总效应量(Effect Size),并选定数据分析时所需的双侧检验、显著性水平、检验效能以及等值样本量导入G-Power,最终计算该实验中,测试组和对照组的最低样本量各为11。故选取目前在役且成绩达到国家一级及以上水平的羽毛球专业运动员以及未经专业羽毛球培训的普通大学生各12人(表1)。纳入标准包括:右手为持拍手,年龄在18 ~ 25周岁,身体健康,无心脑血管疾病,无先天性疾病,无身体活动障碍等人群。

表1 受试基本情况
1.2 实验过程
1.2.1 运动信息采集
本实验选用Xsens MVN惯性动作捕捉系统,实验采样频率为240 Hz,一次实验时间为1 min,有效实验时间段3 s,流程如下:
(1)所有受试在测试前进行5 ~ 10 min热身和动作练习,穿戴Xsens设备(包括放置在头部、上臂、前臂、手、腰椎、大腿、小腿、足上的14个IMU传感器,见图1),以标准姿势进行设备校准。
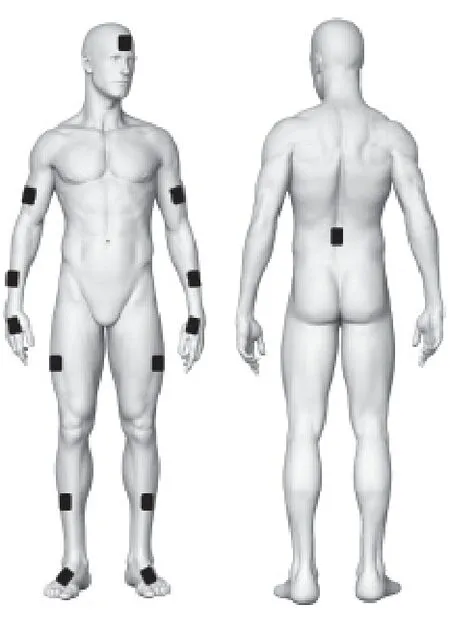
图1 Xsens传感器穿戴位置示意图
(2)测试时,受试依次站于羽毛球场前场同一位置,发球员在球网对侧定点发球,让受试由站立状态以正手勾球、反手勾球的技术动作回球过网。发球员注意保持球速、落点一致,受试者在同种动作的重复测试中也应保持击球速度、力量和旋转的一致性,且保证击球前后上肢无多余动作。重复动作间隔60 s以上排除疲劳干扰。根据以上条件获取有效测量数据,同一受试单个动作采集5次有效数据,总有效数据共240次。
1.2.2 运动模型与仿真
羽毛球运动涉及手指、腕和手臂的整个运动链,且运动中各关节力矩臂的不确定性使测量结果不能直接应用于上肢模型的建立。本研究利用惯性动作捕捉设备采集的实验测量值与OpenSim仿真的预测值对比,通过调节参数使二者曲线相匹配,从而建立更为准确的上肢模型。建模仿真过程主要分为四个步骤:模型缩放、逆运动学、残差减少算法和肌肉计算控制。
可以看出图7中Gw,min=10.5×10-4 m3/s为对应的最小进气量,能使热水器在35 s内能够达到40 K的温升。同理,随着进水流量的继续提高,都应该对应一个最小进气量Gw,min,使其在达到40 K的温升时加热时间小于35 s。通过MATLAB迭代,当进水流量由9 L/min提高至16 L/min时,对应的最小进气量如图8所示。
获得准确的仿真需要有针对性地缩放OpenSim预设的通用模型,依据实验室测试标记点数据与通用模型中人体环节点之间的比例关系对各环节的长度和质量进行缩放[19]。缩放可以将实验测得的标记点与模型中预先标记好的虚拟标记点进行比较,并调整虚拟点的坐标,使仿真模型与实验数据完全吻合。
逆运动学(Inverse Kinematics,IK)在OpenSim中主要用于生成模型的运动信息,不考虑产生动作的力和力矩[20]。通过解决最小化标记误差的加权最小二乘优化问题来寻找最佳匹配。按照采样频率,本研究中每次试验含有720帧有效数据。将实验标记点与对应虚拟标记点之间的距离定义为标记误差。每个标记点有一个权值,表示该标记误差项在最小二乘问题当中最小化的程度。在每一帧中,找到一个广义坐标向量(如关节角度),此时,最小化标记点误差的加权和可以表示为:
为了最大程度地减少建模和标记数据处理错误的影响,需要引入残差缩减算法(Residual Reduction Algorithm,RRA)[22],通过更改特定对象模型骨骼的质心,使逆运动学中的模型运动学发生变化,以便模型更动态地与地面反作用力数据保持一致。RRA算法的主要原理是通过增加残差力来调整模型的力学特性,但误差不可避免,只能通过轨迹优化和环节质量调整等方法来减少。
由于羽毛球运动中,被试需要与球拍进行交互,因此还要引入正向运动学分析。正运动学进行肌肉计算控制(Computed Muscle Control, CMC)通过运动微分方程求解出身体部分的加速度和角加速度,进而求出肌肉对身体的作用力。在执行CMC算法之前,需要先计算模型的初始状态[23]。初始状态包括广义坐标(关节角度)、广义速度(关节角加速度)和肌肉状态(如肌肉活性度和纤维长度)。
1.3 实验参数和数据处理
本实验通过Xsens 惯性动作捕捉系统采集肩、肘、腕关节在进行正、反手勾球时各自由度上的关节角度和力矩的变化,使用Matlab 2020a软件进行数据处理,包括数字滤波、低通滤波,与批量处理同类型数据;使用SPSS 28.0对专业组和业余组进行独立样本t检验,显著性水平α设定为0.05;使用OriginPro中的Levernberg-Marquardt算法(LMA),对所采集的数据进行非线性最小二乘法拟合,获得可视化结果。处理后的数据将作为OpenSim的仿真驱动文件,借助先前建立的上肢运动模型进行运动生物力学分析。
2 结果
2.1 反手勾球运动学、动力学分析
2.1.1 反手勾球肩、肘、腕关节参数分析
实验中,反手勾球的运动学、动力学参数结果如表2,对专业组和业余组的三个关节的合速度、最大关节角、关节角度变化范围以及峰值力矩进行独立样本t检验。
可以看出,两组的肘关节合速度方差齐性,差异性不显著;腕关节合速度有统计学差异,肩关节的合速度差异更具显著性;从关节角来看,专业组与业余组的肩关节的屈曲、内旋及腕关节的尺偏峰值有极其显著的统计学差异,其他方向差异不明显;肩关节的屈曲角和腕关节的尺、桡偏角范围具有极其显著的统计学差异,腕关节的屈曲角度范围具有显著性差异;而在关节力矩方面,两组的肩关节内收、外展,腕关节尺、桡偏的力矩峰值具有极其显著的统计学差异,肩关节的旋转力矩也有显著性统计学差异,其他关节的生理活动方向上不具备统计学差异。
将实验数据可视化处理,灰色实线及阴影表示专业组均值和方差,红色实线及阴影表示业余组均值和方差。人体肩关节有三个自由度,包括屈曲、外展内收和旋转。整体如图2所示,两组的内收、外展角度均值变化接近,其中业余组的方差较大,说明无专业训练的击球技术的动作重复性较差,每次挥拍击球比较随意;业余组的旋转角明显高于专业组,说明不同水平人群的反手动作存在较大空间差距;两组肩关节的三个方向力矩变化均有显著性差异,专业组在击球前后发力与收力动作明显,而业余组发力平缓,击球前后发力稍有波动,说明业余运动员挥拍动作发力点不固定。
具有一个自由度的肘关节在两组中的差异性较为显著(图3)。首先,两组肘关节屈曲角度范围差异较小,但变化趋势差别很大,专业组勾球动作完整有力度,业余组挥拍前初始姿势不标准,与专业组存在较大差异;专业组的反向力矩明显增大,即发力小于收力动作;而业余组的肘关节的屈曲力矩波动也明显大于其他关节,预示非专业羽毛球爱好者在运动中可能存在肘关节发力不当等情况,增加了损伤风险。
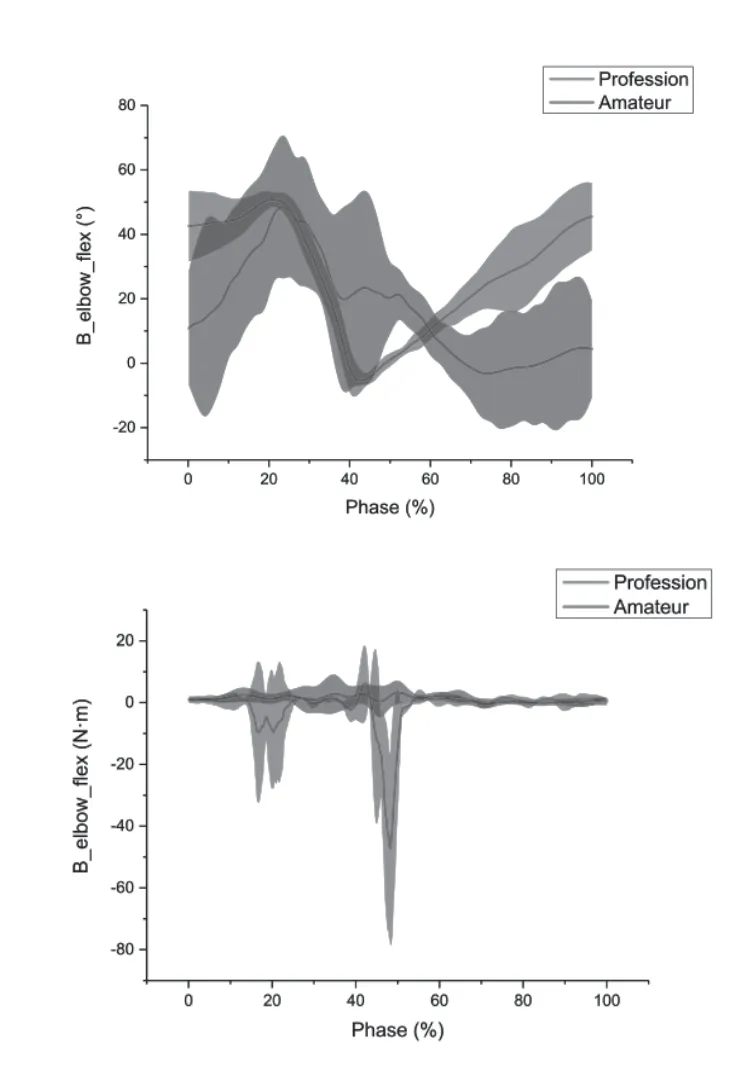
图3 反手勾球肘关节单自由度关节角、力矩
腕关节在球类运动中是最容易体现运动技巧的关键部位。从图4中看,专业组的腕关节角度波动幅度明显大于业余组,且两组的尺、桡偏方向的运动趋势完全不同,专业组动作可重复率极高,峰值明显,而业余组击球过程中的手腕动作杂乱无规律性;但同时,专业组腕关节桡偏正向力矩虽远大于业余组,但也存在较大方差,说明在类似反手勾球的技巧性的动作上存在个体性差异,可能与运动习惯和教练指导差异有关。
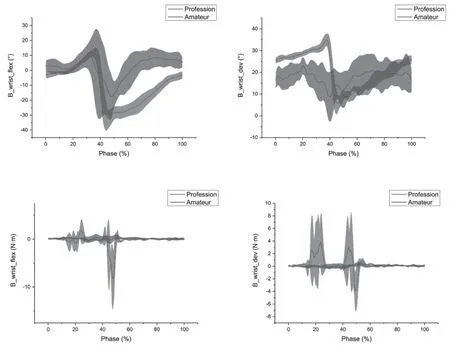
图4 反手勾球腕关节二自由度关节角、力矩
2.2 正手勾球运动学、动力学分析
2.2.1 正手勾球肩、肘、腕关节参数分析
实验中,反手勾球的运动学、动力学参数如表3所示。两组的三关节合速度均具有统计学差异性,其中腕关节统计学差异最为显著;肩关节内收、外展和腕关节屈曲角度峰值有极其显著的统计学差异,肩关节旋转、肘关节屈曲角度峰值具有较为显著性差异;腕关节屈曲、肩关节屈曲与内收、外展角度变化均有显著性统计学差异,其余方向上不具备显著差异;就力矩而言,仅肩关节的多向峰值具有统计学差异,这可能是正手勾球动作普遍施力较小造成。
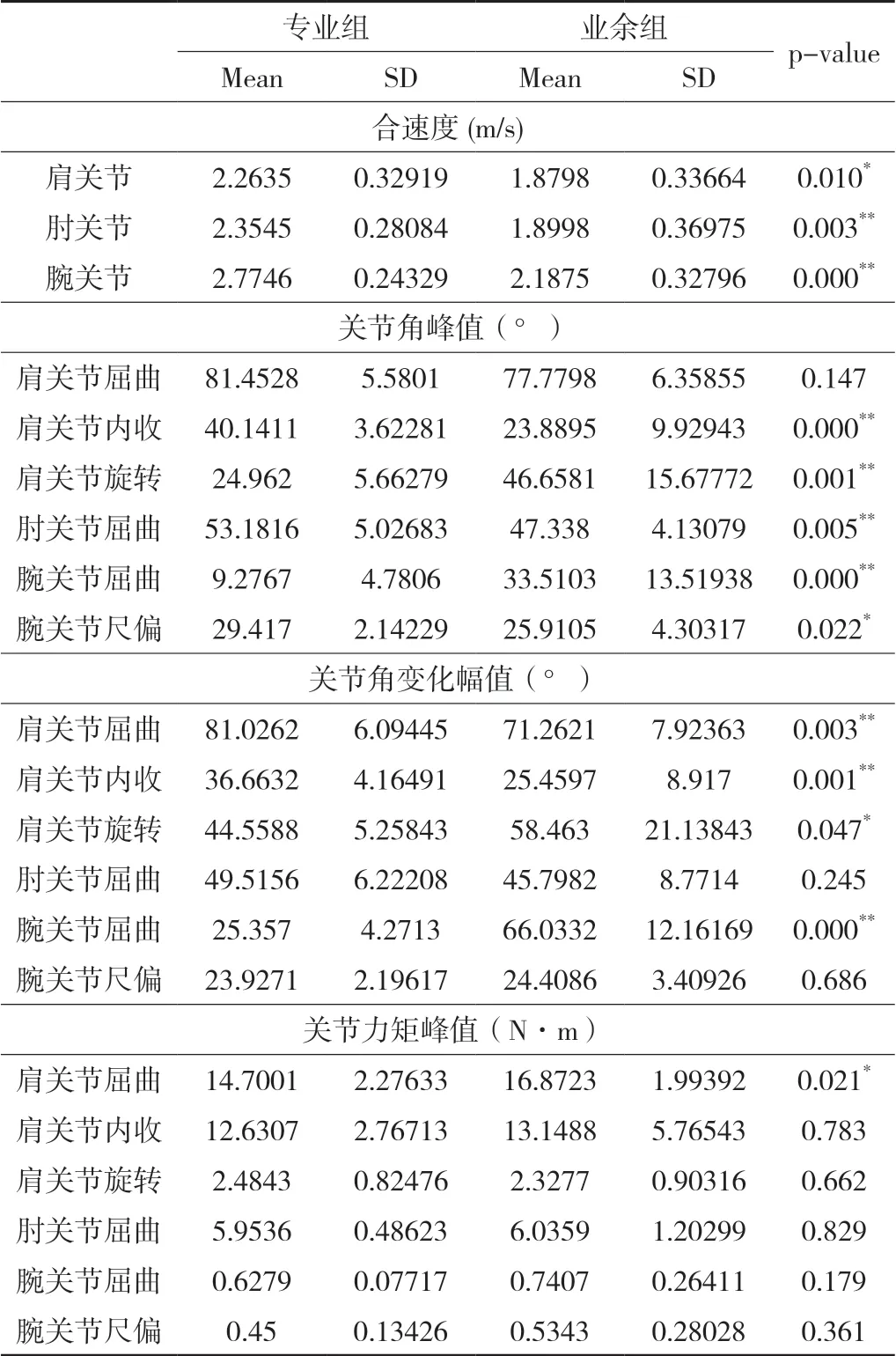
表3 正手勾球中专业组和业余组运动学、动力学参数t检验
2.2.2 正手勾球关节角、力矩可视化分析
如图5所示,在肩关节的屈曲方向上,专业组关节角峰值与幅值较业余组差距极小,角度变化趋势高度一致,但力矩变化趋势差异较大;在内收、外展方向上,业余组的挥球角度变化曲线存在多个谷值,预示击球过程中存在犹豫行为,对最佳击球时刻的判定存在误区;在旋转方向上,两组的角度变化曲线的峰值显著性差异,可能是业余组击球时身体僵硬,处理远距离来球时过度挥臂发力,而不是积极调用下肢配合协助击球运动的完成。
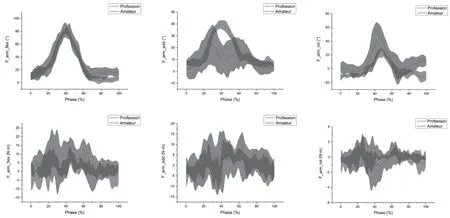
图5 正手勾球肩关节三自由度关节角、力矩
在正手勾球的肘关节屈曲方向上,专业组和业余组的关节角度、力矩变化曲线差异性极大,甚至初始准备阶段也存在一定差异(图6),接发球的状态直接影响了两组的角度变化曲线,经过专业训练的人群,初始参数方差更小、姿势更稳定,因此动作重复性也更好。
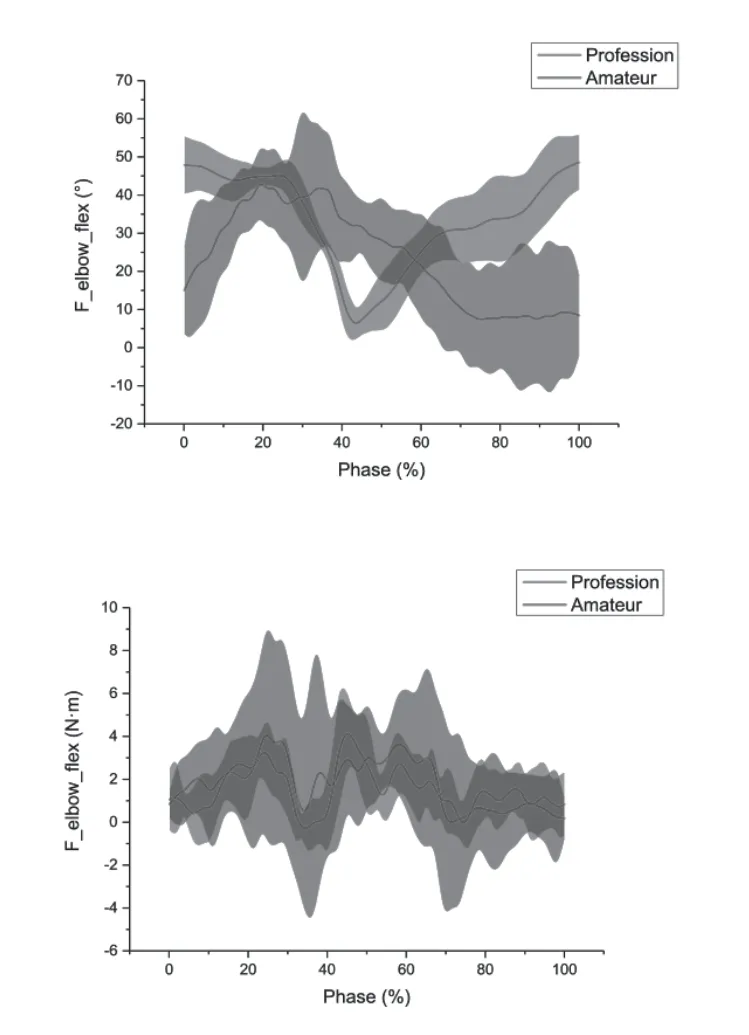
图6 正手勾球肘关节单自由度关节角、力矩
在腕关节的两个自由度上,如图7所示,专业组和业余组同样存在较大差异性。首先,腕关节的屈曲方向上,业余组的关节角度变化幅值明显大于专业组,这归因于业余组在接发球的过程中下肢没有积极跟随,击球时依靠摆臂顺势带动腕关节产生较大幅度的勾球动作;在尺、桡偏方向上,专业组在更短的击球瞬间获得了更大的力矩变化,且准备击球所用时间远小于业余组,这表明专业组有着更强的击球时机 把握。
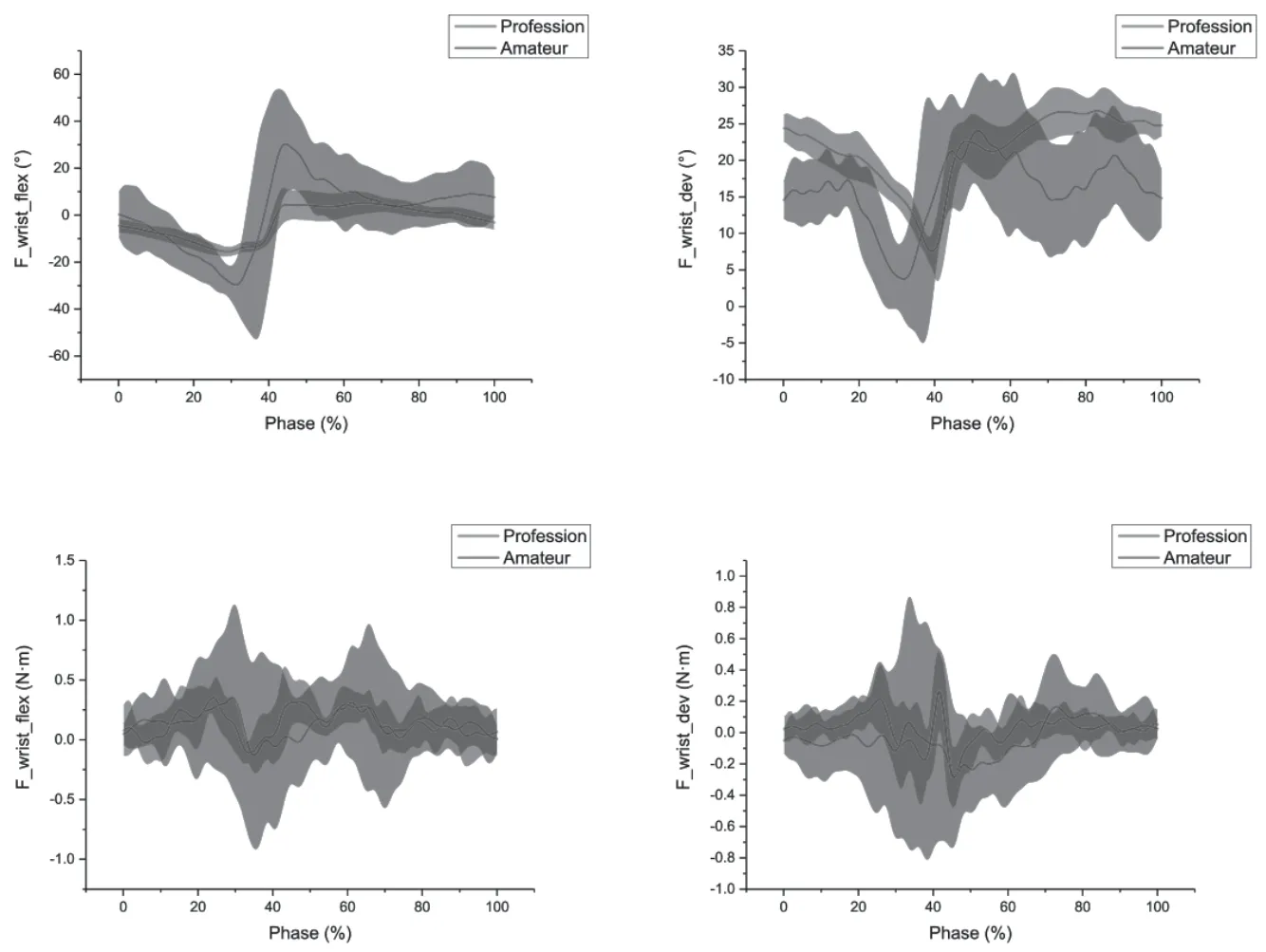
图7 正手勾球腕关节二自由度关节角、力矩
整体来看,两组人群正手勾球动作相关参数变化均无较大规律性。正手勾对角技术的引拍不同于其他网前技术,需要腕肘在各活动轴变化来调整击球点和击球的拍面。勾球技术不具备很强的进攻性,主要靠回球线路的变化来调动对手的跑动。由于击球点在球网的中部或中下部位置,在移动上网时,运动员需要稍降低重心向前蹬跨步,整体动作幅度较小,施力也较小,这也部分解释了正手勾球的上肢力矩没有共性特点。此外,正手勾球的运动过程依靠连续的力矩臂,可能导致与实验测量值不匹配[24]。这种较差的对应关系可能是由于缺少重要信息如关节厚度,旋转轴的位置和方向,骨骼结构以及与二维向三维转换等相关变化等因素引起的[25]。
3 结论与建议
从实验结果上看,在反手勾球动作中,专业组和业余组最大的差异性体现在力矩上,专业组的三个关节在各个自由度方向上均远大于业余组。一方面,力矩过大会带来一定的运动损伤,另一方面,力矩也是肌肉力量的表现,业余组在“挥拍-击球-收拍”的完整动作中,力量波动非常小,由此证明这是提高羽毛球竞技水平的关键点。而在正手勾球动作中,由于动作本身的特殊性,使得运动水平与各参数相关性不明显。整体来看,在两个动作中,无论是专业组还是业余组,其运动学差异相较于动力学更为明显。
本文认为,在经过长时间训练后,羽毛球运动员的运动行为一致性高,移动和落地姿态稳定,动作具备非常高的协调性、完整性和连贯性。而业余选手的发力随意,击球动作不规范,对网前勾对角技术动作理解不够全面。因此,在实际训练中,需针对不同水平选手的特点进行针对性训练,重视肌肉力量训练和动力链的动量传导。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
内燃机与配件(2022年2期)2022-01-17
医学概论(2021年19期)2021-01-21
中西医结合心血管病电子杂志(2020年17期)2020-07-20
求学·文科版(2020年9期)2020-07-18
冰雪运动(2020年5期)2020-03-29
现代养生·下半月(2019年9期)2019-11-12
数码摄影(2017年1期)2017-03-01
新高考·高一物理(2016年1期)2016-03-05
科学生活(2015年1期)2015-02-05
