
基于原子力显微镜的自动控制教学实验系统
2022-09-23 10:35范嘉文
实验室研究与探索 2022年6期
张 健, 彭 超, 范嘉文
(电子科技大学自动化工程学院,成都 611731)
0 引 言
自动控制类实验课程是自动控制原理、计算机控制系统、线性系统等理论课程的重要组成部分,对促进理论讲授与实验教学相融合,提高学生创新和动手能力、发挥学生主观能动性具有重要意义。实验设备是保证实验教学开展的基础条件,然而,现有的教学实验设备多以机电系统为被控对象[1-3],可以在微纳尺度上进行实验教学的设备较少。
本文基于商用原子力显微镜(Atomic Force Microscope,AFM),开发了应用于微纳尺度的自动控制类课程教学实验系统。该系统采用“快速原型”方法构建,即利用MatlabxPCTarget和宿主机(上位机)-目标机(下位机)结构实现控制器,通过目标机对AFM进行实时控制。应用该系统,可以方便地对理论教学中讲授的控制算法进行编程、快速原型化、测试和优化,它不仅丰富了实验课程的内容,也增进了学生对于基本概念、基本方法、基本原理的理解,深化了学生对于微纳尺度仪器与设备的认识。
1 原子力显微镜
1986年,IBM公司苏黎世研究所的物理学家Binning等[4]因发明扫描隧道显微镜(Scanning Tunnelling Microscope,STM)而获得诺贝尔物理奖。同年,Binning等[5]在STM的基础上,又发明了AFM,将观察对象由导体、半导体扩展到了绝缘体。AFM不仅可用于纳米级成像[6]或力学性质测量[7],也被用于材料的纳米级加工[8]。AFM主要包括压电扫描器、微探针、自动控制系统、光电检测器、软件等,如图1所示。其主要工作原理为:由于微探针与被测样品之间的相互作用力与其间距成一定的曲线关系,当压电扫描器沿平面移动样品(或微探针)时,为了保持样品和探针之间的相互作用稳定在某个恒定值(相互作用力或相对高度),反馈控制系统将根据光电检测器检测到的探针形变在方向移动样品(或微探针)以适应被测样品的表面起伏。这样,在样品上每个点对应的反馈控制量就反映了样品的表面形貌[9]。
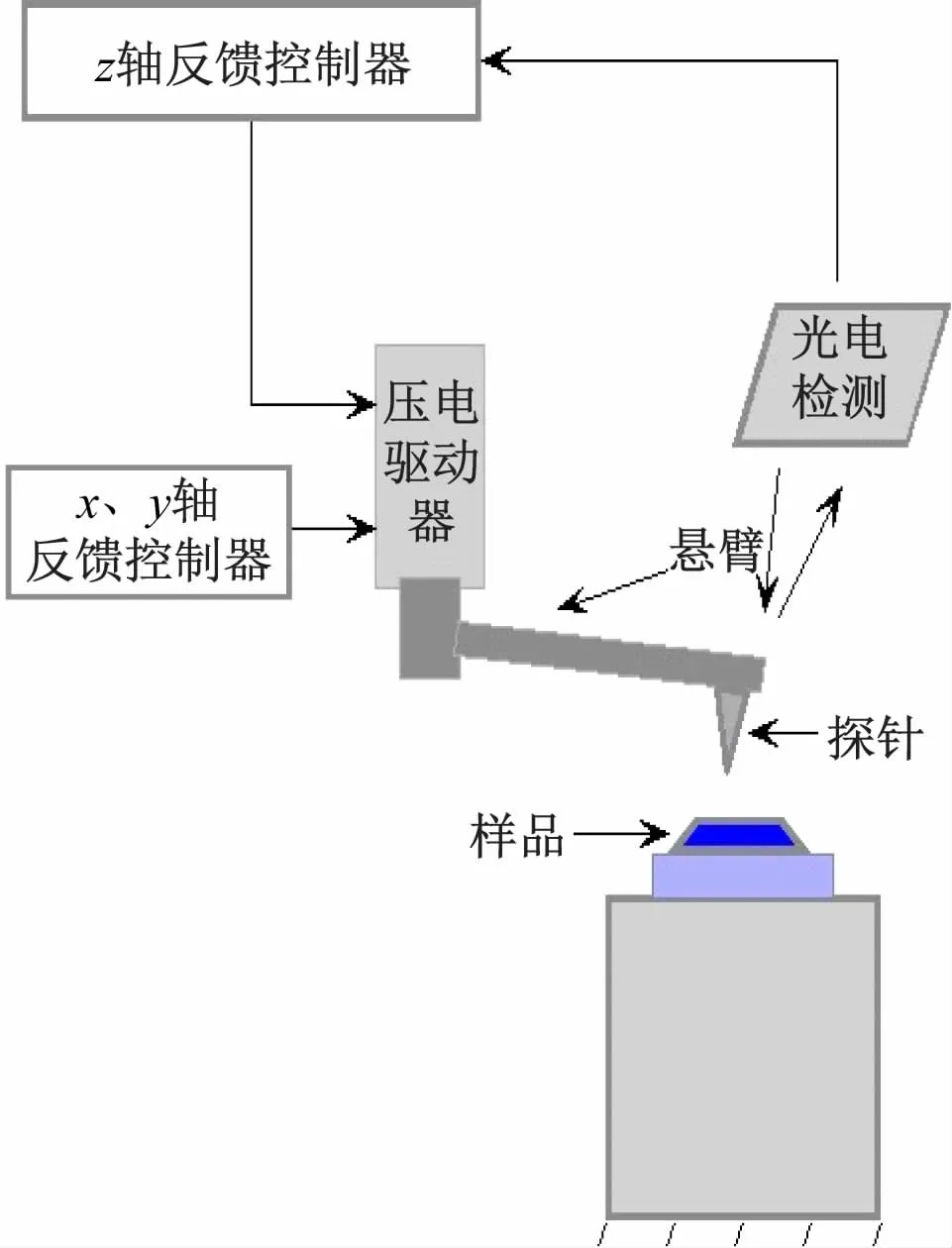
图1 AFM结构示意图
本文选用广州市本原纳米仪器有限公司研制的CSPM5500扫描探针显微镜作为被控对象,工作模式设置为接触模式。本原CSPM5500显微镜如图2所示。输出信号包括x、y方向的位移信号以及探针在z方向上的形变信号,输入信号包括压电驱动器在x、y、z方向上的控制信号。

图2 本原CSPM5500扫描探针显微镜
2 xPC Target工作原理
Real-time Workshop(RTW)是MathWorks公司为图形建模和仿真开发的一个自动代码生成环境,它能够将Simulink的模块图程序自动转化为C代码[10]。xPC-Target是一个基于RTW的实时内核系统,可以通过简单的连接和配置两台普通计算机来实现[11]。因此,RTW和xPC Target提供了一种结构简单、性能较高、造价低廉的实时控制系统实现方式。
xPC Target的工作原理和硬件实现如图3所示。宿主机安装有Windows、Matlab、Simulink、RTW和xPC Target,目标机无需安装操作系统,在DOS环境下运行。两台电脑之间通过网卡连接,利用TCP/IP协议进行通信。使用Simulink完成图形化编程后,宿主机利用RTW和C编译器创建一个可执行程序,并将该程序从宿主机下载到目标机,在目标机中的xPC Target实时内核中运行。
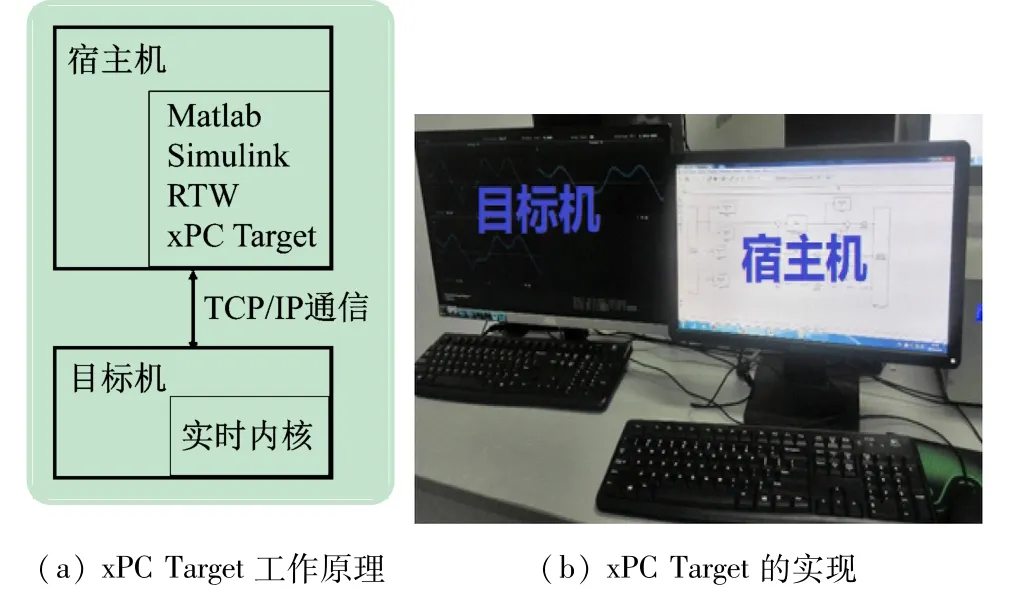
图3 xPC Target的工作原理与实现
3 自动控制实验系统构建
本文中所构建的AFM教学实验系统的硬件主要由本原CSPM5500 SPM原子力显微镜、NI PCI 6259数据采集卡、宿主机、目标机组成,系统结构示意图如图4所示。
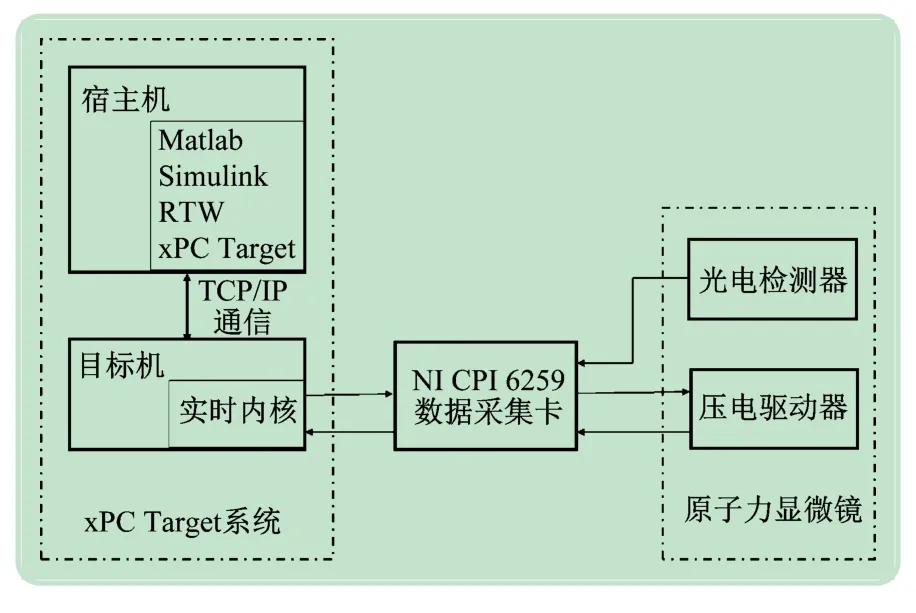
图4 原子力显微镜教学实验系统结构示意图
该系统为三输入三输出闭环控制系统。3个输入分别为压电驱动器在x、y、z 3个方向上的输入电压,3个输出为压电驱动器在x和y方向上的位移、以及z方向探针的形变。由于压电陶瓷的位移传感器输出为模拟信号,因此选择NI PCI 6259数据采集卡作为A/D、D/A转换器,该数采卡支持32路模拟输入和4路模拟输出,在程序运行时,闭环控制系统的采样频率可以达到10 kHz以上。需要说明的是,由于压电驱动器的特性,3个闭环回路之间存在耦合现象。此外,压电驱动器自身具有蠕变、迟滞等非线性特性[12],但通过动态补偿在一定区间内可以转换为近似线性[13-15],因此该系统可以同时用于线性系统和非线性系统控制课程的教学实验。
由于Matlab既自带有工具箱,又有许多第3方开发的工具箱,这为控制算法编程提供了方便。例如,可以直接调用工具箱中的各种滤波器对输入信号进行去噪。同时,Matlab具有运算效率高、擅长矩阵运算等优点,这也为实验后进行控制系统性能计算和过程数据分析处理等提供了方便。
在使用本系统时,首先利用主机中的Simulink进行控制算法编程,在程序中,需要添加NI PCI 6259采集卡驱动模块作为程序的输入与输出。然后在目标机中运行由RTW和C编译器生成的可执行文件。当程序运行时,通过数据采集卡与AFM进行数据交换,在目标机中实现数据可视化。控制器参数可以在宿主机中进行修改而无需重新编译。被控对象和控制器的运行数据将被存储在目标机中,通过宿主机直接调用读取。
4 实验部分
4.1 幅频特性测量实验
波特图是自动控制类课程中极其重要的基本概念,是被控对象数学模型的图形化描述,波特图包括幅频特性曲线和相频特性曲线。使用所开发的实验系统测量压电驱动器在x、y位移方向上的幅频特性曲线。
幅频特性曲线的横坐标为对数频率,纵轴为20倍的对数幅值增益。理论上,将被控对象输入取为1个频率随时间连续变化的正弦信号作为激励信号,在各个频率点测量被控对象输入和输出的幅值增益,即可绘制出幅频特性曲线。实验中直接调用Matlab工具箱中的Chirp signal模块作为压电驱动器的激励信号,该模块将输出一个频率随时间线性增长的信号。初始频率设定为10 Hz,目标频率设定为5 kHz,目标时间为10 s。通过在x方向施加激励,在x方向取得输出响应,获得x方向的幅频特性曲线,如图5(a)所示。同理可获得y方向的幅频曲线,如图5(b)所示。为了获得压电驱动器的动态耦合特性,在x方向施加激励,在y方向取得输出响应,得到x-y之间耦合动态的幅频特性曲线,如图6(a)所示。同理得到y-x之间耦合动态的幅频特性曲线,如图6(b)所示。
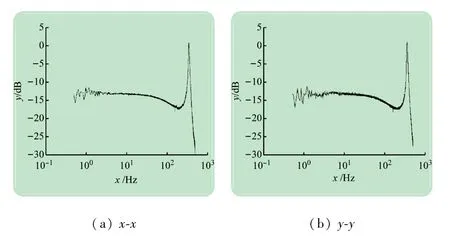
图5 非耦合动态的幅频特性曲线
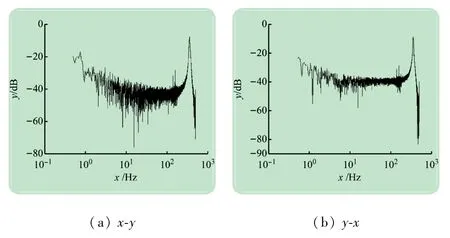
图6 耦合动态的幅频特性曲线
由上述幅频特性曲线可知,该压电驱动器的共振频率约在250 Hz,截止频率约在400 Hz。耦合动态的幅值增益远低于非耦合幅频特性的幅值增益,这说明由耦合导致的动态对压电驱动器的输出影响较小。
4.2 基于PID控制的刻写实验
由于空白光盘的表面较为光滑且硬度适中,因此将其选为刻写材料。在本实验中,将应用教学实验系统在光盘表面刻画英文字母“R”,即将“R”作为压电驱动器在x-y平面的期望输出。为此,需要在x和y方向上对压电驱动器进行路径跟踪控制。考虑到PID控制器是自动控制类课程讲授的重点,因此在Simulink中调用PID控制模块搭建了刻写控制系统。实验结果如图7所示。
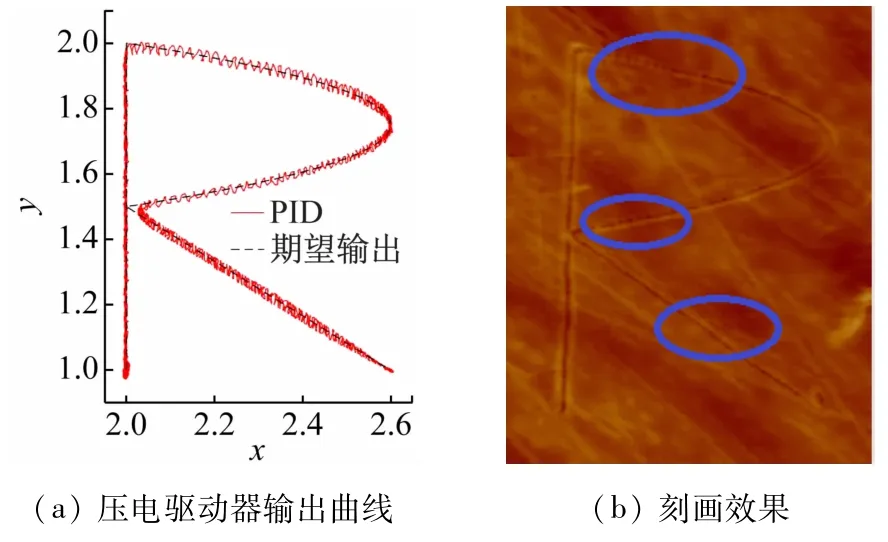
图7 基于PID的AFM刻画
由图7可知,与期望轨迹相比,PID控制器下的压电驱动器输出波形存在着明显的抖动,与期望轨迹相比存在一定的偏差。这导致了探针在光盘表面所刻画的曲线比较粗糙(见图7(b)中蓝圈所示),线条有较大的抖动且不够平滑。实验结果表明,PID控制虽然实现简单,但在对控制器性能要求较高的应用场景,其性能往往存在不足,需要优化提高,这与对PID控制器性能的理论分析相吻合。利用该实验结果可以进一步启发学生尝试可能的解决方法,例如重整定PID控制器的参数、引入新的控制算法等。同时也可以引导学生寻找定量描述刻写误差的理论工具。
5 结 语
针对自动控制实验课程中缺乏微纳尺度教学实验的问题,利用Matlab xPC Target和AFM构建了教学实验系统。它具有成本低、性能较高、操作简单等优点,可以开展频域建模、控制设计与实现、控制器性能分析等方面的实验,丰富了实验课程的内容。通过应用该系统,学生能够将自动控制及其相关课程中讲授的理论方法应用于微纳系统,有助于培养学生的研究能力、提高学生的学习兴趣,深化学生对自动控制理论知识的理解。
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
海峡科技与产业(2021年1期)2021-05-22
少儿美术(2021年2期)2021-04-26
电脑爱好者(2020年6期)2020-05-26
武术研究(2020年2期)2020-04-21
科技创新导报(2017年28期)2017-11-28
北京航空航天大学学报(2017年5期)2017-11-23
电子技术与软件工程(2017年8期)2017-05-10
亚太教育(2016年31期)2016-12-12
电脑知识与技术(2016年4期)2016-04-11
