基于BIM与GIS的矿山巷道参数化三维建模技术研究
2022-09-22 02:58:50康济童李兆阳肖彬虎
煤炭科学技术 2022年7期
李 梅,康济童,刘 晖,李兆阳,刘 曦,朱 青,肖彬虎
(1.北京大学 遥感与地理信息系统研究所,北京 100871;2.中煤能源研究院有限责任公司,陕西 西安 710000;3.北京龙软科技股份有限公司,北京 100190;4. 中煤陕西榆林能源化工有限公司 大海则煤矿,陕西 榆林 719000)
0 引 言
地下巷道是井工矿山生产的主要作业场所,巷道三维建模技术是矿山专业软件的基本功能,如Surpac、3DMine、LongruanGIS等都有相关建模功能[1-3]。传统的巷道GIS三维建模是依据采掘工程平面图的导线测量成果数据进行中线-断面构建,或者根据巷道两帮数据构造顶面、底面和侧面,形成三角网轮廓模型[4-6]。这些模型数据形态简单,缺少各专业属性,集成度低。以“数字孪生”为理念的智能化矿山建设将空间信息与矿山生产业务进行了有机融合,在透明矿井、智能工作面、机器人SLAM、数字孪生与智能诊断等方面具有巨大的应用潜力[7-8]。巷道三维建模技术逐渐转向了基于BIM参数化建模[9-10]、激光点云巷道重建[11-14]、全景建模[15-17]等新技术。常见的BIM平台有Revit、MicroStation、CATIA等,广泛应用于建筑工程、交通、水利和城市建设等领域。国产广联达AECORE开发平台也有广泛应用[18-19]。BIM建模在煤矿领域应用还刚刚起步。BIM和GIS的集成还刚开展研究[20]。在BIM参数化建模方面,一些煤矿设计单位通过对Revit平台的二次开发,建立采矿工程井巷设计模块,实现了煤矿井下巷道BIM设计[21-22]。何利辉[23]提出了巷道参数化BIM建模的思路,并在张家峁开展了应用。李雯静[24]提出了基于Dynamo的矿井巷道参数化建模方法。甘怀营[25]采用MicroStation进行了巷道参数化建模。陈镇等[26]采用Dynamo技术进行巷道轴网布置、族库构建、BIM地质模型建立,验证了BIM技术在煤矿数字化矿山建模工程中的可行性。
综上所述,当前煤矿领域的巷道建模还存在如下问题:①BIM巷道三维建模主要用于井巷工程三维协同设计,数据结构复杂、细节信息量大,缺少巷道拓扑关系,在几何和语义上与GIS模型相差很大,难以实现数据集成和后续应用;②GIS巷道三维建模尽管构建了巷道拓扑关系,但是对于复杂巷道的处理较为简单,通常舍去硐室等巷道细节信息,拐点和交岔点需要单独处理,所建三维模型多用于宏观展示基本形态,可视化能力弱,属性参数少,也无法满足智能矿山各个专业的信息化需求。因此急需开展GIS和BIM模型数据集成技术研究。
提出了基于GIS和BIM的巷道参数化建模方法,整理了与巷道建模相关的各种资料和图表,主要包括地质勘探报告、生产地质报告、支护设计报告、通风设计报告、应急预案等文档,并获取了采掘工程平面图、地质素描剖面图、采矿设计断面图、通风系统图、避灾路线图等系列基础图形数据,对矿图进行巷道GIS拓扑数据预处理,形成了矿井巷道中线网络数据集,从图形和文档中提取地质素描、巷道设计、通风网络、避灾线路等专业参数,采用布尔运算建模算法根据中心线和属性参数生成了具有支护、喷浆厚度等细节的巷道模型,并确保硐室、拐弯、交岔点等模型形态。与传统方法相比,该方法既保留了GIS空间关系,又具有了BIM三维模型细节,能够方便地与其他信息系统集成,大幅提高了数据的复用性。
1 基于BIM和GIS的巷道三维数据模型
巷道空间是井下作业场所,人员、设备、传感器等分布于巷道三维空间中。矿井巷道网络结构复杂,包含数百条甚至上千条分支。与路网、管网、电网等类似,巷道也构成了一个特殊的三维网络,在这个网络模型中,每条巷道被抽象为节点、弧段等对象,并且弧段和节点之间有连通关系。利用GIS矿图的巷道中心线数据,建立基于三角面表示的巷道三维BIM模型。
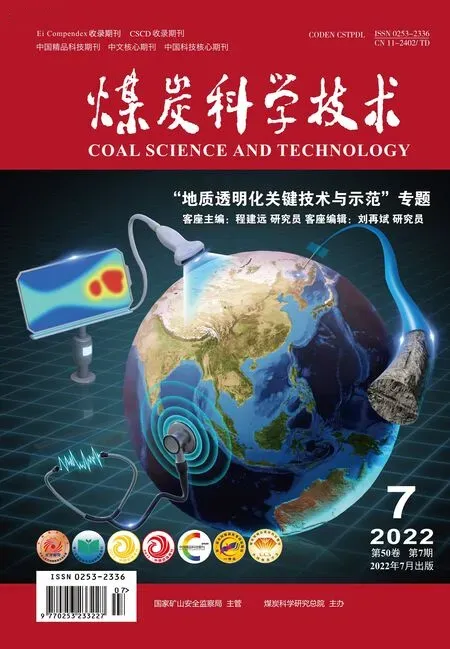
原始巷道和巷道中线示意如图1所示。巷道中线上的控制点数据主要来源于2个方面,矿图上测量导线点坐标和巷道掘进过程中的素描图实测点。常见的矿图坐标系有北京54、西安80或2000国家大地坐标,根据具体情况进行坐标转换预处理。根据这些数据可以生成矿图1a的巷道平面图,根据原始巷道控制点数据生成的巷道中线如图1b所示。
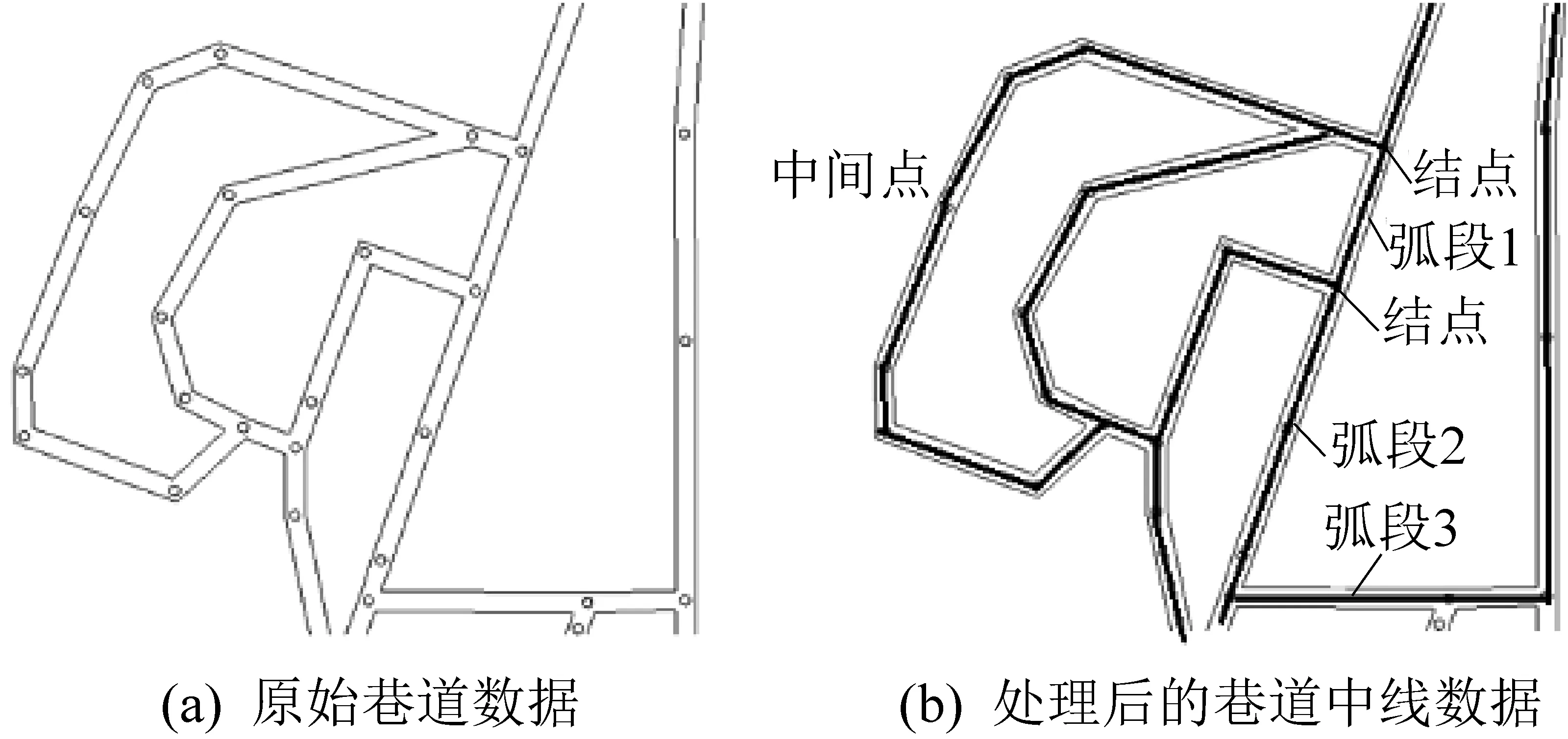
图1 巷道中线网络拓扑示意Fig.1 Topology of roadway centerline network
基于GIS和BIM的巷道三维数据模型如图2所示,包括结点、中间点、巷道弧段、巷道中线等GIS常见的基本数据类型。而BIM基本数据类型为三角形,在三角形上构建了三角网以及巷道参数化模型。两者通过巷道中线ID进行关联。

图2 基于GIS和BIM的巷道三维数据模型Fig.2 3D data model of roadway based on GIS and BIM
1)结点:巷道弧段的端点,也可以是巷道的交岔点。
2)中间点:巷道弧段上除结点以外的其他点。中间点与结点都处于巷道弧段上。
3)巷道弧段:每逢巷道相交时必定断开,形成结点和弧段,当相邻两点间没有分支的巷道,形成巷道弧段,是构成巷道的基本单位。
4)巷道中线:由巷道弧段组成的、具有一定功能的巷道,由巷道弧段顺序连接。通过导线点和素描数据获得空间坐标信息,形成一条完整的巷道。
结点、中间点、巷道弧段、巷道中线能够简单描述巷道的空间形态,构成了巷道三维模型的网络骨架。即通过搜索弧段首位结点,建立结点和弧段、弧段和弧段之间的邻接关系,记录网络拓扑关系表,从而形成了巷道网络模型[6]。该模型是通风解算、灾害模拟、避灾逃生、人员定位的基础数据。利用网络拓扑,可以有效减少巷道网络模型的数据存储量,便于进行空间特征的查询和分析,协助空间和属性数据组织。
5) 三角形:构成三维模型的基本单元。每个三角形都对应了顶点信息、法向信息、材质信息等,便于三维可视化渲染。
6)巷道参数化BIM模型:通过建模算法生成的巷道表面三角网模型,可以直观反映巷道真实形态,展示支护情况等细节信息。
7)专业属性:采矿设计、通风解算、灾害模拟、避灾逃生基础数据。便于巷道模型在专业应用领域的规范使用。
在数据模型中,本系统结合矿山实际专业应用领域,根据各类设计报告和实测资料,存储了巷道的专业属性信息,包括巷道名称、巷道类别、巷道断面参数。其中,巷道名称一般包含着巷道的功能和属性,能够基本反映巷道的基本信息。为更好地定义巷道三维模型,结合巷道类型和巷道性质,将井下巷道基本类型定义为4类,其中将联络巷、硐室和煤仓等特殊构造物单独列为一类,见表1。

表1 巷道基本类型
1)井巷设计工程参数主要是服务于巷道工程,基于专业计算给出巷道设计施工图和支护方案。巷道支护参数包括支护类别、锚杆/锚索长度、排距、间距、钢材规格、钻孔直径应力强度等信息,可以用于建立巷道支护三维模型[27]。
2)地质素描参数主要是将井巷掘进和回采过程中遇到的地质现象和测量结果进行描述,包括煤岩层揭露点的巷道高度、岩层厚度、标志层厚度,断层、冲刷带、积水区等地质构造位置及编号等。
3)巷道通风参数包括风压、局部通风机数据、局部通风机状态、风流方向、风流是否反风、风量、风阻、断面积等信息以及风门位置、调节风窗位置、密闭位置、风障位置、导风板位置、反风装置位置等通风构筑物附加属性,用于通风网络解算和通风系统模拟。
4)巷道避灾路线参数对巷道避灾参数进行描述,能够计算出事故发生地点到安全地点的路线,获得最合理的建议撤退路线。避灾线路基于巷道网络图生成,避灾参数包括坡度、障碍物系数、地形起伏系数等[28]。
2 参数化巷道建模流程
主流三维建模技术标准是一组以XML为规范的交换数据格式,在数字城市领域常见的三维标准有OGC的CityML,Web3D 的X3D等,而在矿山领域尚未出现类似标准。本论文参照上述三维标准,以 XML 对巷道中线网络进行编码表示,后缀为xml, 以文件方式存储。还以XML schema定义了数据类型、命名空间等,记录XML的结构定义信息,文件后缀为.xsd。
参数化建模是指根据设计公式或参数形成建筑设计的结构和外形,实现多样化设计和可视化的目标。巷道参数化BIM建模,是根据巷道XML文件中的几何和属性数据,采用BIM软件生成具有设计细节的三维模型,同时保存巷道的地理位置以及拓扑关系。主要使用Revit中的Dynamo插件实现巷道BIM参数化建模。Dynamo是一种基于Revit的可视化编程平台,能够针对矿山巷道结构复杂、数据量庞大的特点进行参数化自动化建模。
参数化巷道建模流程如图3所示,主要步骤如下:

图3 三维巷道参数化建模流程
1)巷道GIS数据预处理。逐条巷道开展巷道GIS拓扑数据预处理,分析巷道之间空间关系,去除冗余点、悬挂点和伪节点等,生成具有拓扑关系的巷道中线、断面参数和属性数据的文件。
2)读取巷道模型数据,其中包括巷道断面参数、巷道中线参数、巷道硐室参数和其他属性参数等。
3)巷道断面参数处理。根据断面的底板轮廓线位置、左右帮轮廓线的高度、喷浆厚度和底板厚度、支护参数,形成不同类型断面族。将不同类型的断面族垂直放置于巷道中线上的每一个控制点处。
4)巷道中线处理。遍历提取到的巷道中线,判断是否存在巷道拐弯、相交,或巷道之间起点与终点重合的情况。如果存在,就对交点和拐弯点的断面进行处理,生成新的断面。同时将巷道中线中记录的硐室位置单独标记出来。
5)生成巷道模型。利用处理好的巷道中线和巷道断面进行放样生成巷道实体,采用布尔运算的方法对巷道特殊情况进行并集、差集、交集和干涉计算,生成具有厚度的巷道三维模型。
6)巷道硐室处理。利用巷道硐室参数,生成不同类型的硐室模型。根据硐室参数,采用布尔并集计算方法,将硐室和巷道连接一起。
7)属性参数处理。将巷道数据中的属性分类并输入BIM模型属性列表中。
3 利用GIS提取巷道中心线
巷道中线的网络拓扑编辑是通过判断多条巷道中线的空间关系,形成具有拓扑关系的巷道网络数据集,为巷道BIM建模做好准备。主要的处理流程如图4所示。使用LongruanGIS平台的巷道编辑功能,主要的预处理工作如下:
1) 提取巷道中线数据。在LongruanGIS中,将测量导线点、剖面图中的地质素描实测点、硐室、巷道拐点等整理到平面图上,手动连接控制点形成中线,并输入顶板和底板高程值。
2) 开展数据编辑。构建还未进行拓扑关系处理的结点、中间点数据结构和弧段数据结构,进行重复性检验和处理,消除冗余点和冗余弧段,并逐个检查悬挂点和伪节点,数据实际情况进行保留、删除或修改处理。悬挂点是指结点未连接至其他弧段要素的点;伪节点是指连续弧段上的结点,把该弧段不必要地分为数段,需要合并。
3)确认巷道中线的相交关系。巷道通常交错纵横,而且会有上下分层的情况,尽管平面上相交,但是其实高程不同,因此需要进一步确定巷道中线是否相交。如图5所示,红色和黄色为2条相交的巷道中线,由于巷道设计图在交岔点处没有标注控制点,2条中线在该点处的高程值为系统自动插值生成。2条中线在该点就有可能是相交或是相离。如果2条巷道没有相交,存在上下分层的关系,需要自动修改该点在2条中线上的高程值,使2条巷道相离。如果2条巷道是相交的,而该点由于插值算法导致高程值不一致,需要自动修改该点的高程值,使2条巷道完全相交。

图5 巷道中线拓扑关系Fig.5 Topological relationship of roadway centerline
4)生成巷道网络拓扑关系。
5)在巷道中线上附加巷道各类参数属性。根据图中标注和实际勘探情况,将巷道基本属性参数、断面参数、支护参数、通风参数、避灾参数、地质素描参数等信息添加进每条巷道属性中,见表2。

表2 巷道属性数据结构
续表
4 巷道BIM建模技术
4.1 基本巷道BIM建模方法
基本巷道BIM建模是基于Dynamo插件,通过指定参数和命令集以实现巷道模型设计,在Revit中生成对应的BIM实体模型。
根据构成中线的线段将整个巷道分解成一段或者多段笔直的巷道段。读取巷道中线的断面参数。巷道矩形断面CAD设计如图6a所示,通过计算断面参数后,在Revit软件中形成的含支护的简化断面族如图6b所示。其中,断面宽度为巷道净宽度,加上喷浆厚度后为巷道的实际宽度,底板厚度为底面混凝土硬化后的厚度。巷道外部是根据巷道锚杆(索)布置、钢网片敷设设计和锚杆基础结构等关键参数建立的支护模型。利用Dynamo断面放样的功能,分别生成巷道的基础单元,根据断面参数和巷道中线位置,将独立的巷道锚杆族定位到巷道模型上,基本巷道三维模型渲染图如图6c所示,巷道模型如图6d所示。

图6 巷道BIM基本模型Fig.6 Roadway BIM basic model
4.2 硐室BIM建模方法
硐室在巷道中的作用十分突出,主要包括配电硐室、供电硐室、材料硐室、休息硐室和避难硐室。部分硐室在传统的三维建模算法中较难表示,因此在传统建模中容易被忽略。实际生产和施工过程中,硐室的空间位置能够采用相关巷道的相对距离来描述,如某避难硐室位置为距离大巷口500 m。基于此,可以计算硐室在整个巷道中的绝对位置,然后利用布尔并集运算的方法建立硐室模型。主要过程如下:
1)Dynamo读取带有硐室的巷道中线,通过测量每个硐室距巷道起点的相对距离,利用Dynamo中沿曲线获取特定弧长处点信息,准确定位出硐室所在空间位置。
2)建立硐室实体模型。硐室的形状、规格和结构差别很大,不同功能和不同施工方法形成的硐室也各不相同,根据具体的设计图,在Revit中输入轮廓线参数和内部结构参数,建立每种类型对应的族。
3)将建立好的硐室实体模型定位到巷道中线的绝对位置上,利用Revit中“连接”功能,实现硐室实体模型与巷道实体模型的布尔并集运算。如图7a—图7f所示,分别为带有不规则形状、矩形和三角形硐室的巷道三维模型的渲染图和线框图。

图7 各类硐室模型效果Fig.7 Chamber models
4.3 拐弯巷道BIM建模方法
在处理拐弯巷道BIM建模时,由于断面放样需要按照连续且光滑的弧线进行,为保证建模精度,若简单将巷道中线在拐弯处断开,分别生成巷道模型,就会出现如图8所示的破裂和重叠情况。提出计算巷道拐弯处的角度,并对拐弯处断面进行自动化的处理。主要过程为:

图8 巷道拐弯处处理过程原理Fig.8 Principal of process at roadway corner
1)将一条连续巷道断开成2条巷道模型,2条巷道会在拐弯处点P分别生成垂直于巷道中线的断面S1、S2,如图9所示。
2)计算S1、S2两断面之间的夹角γ,并将其中一个断面S1,以点P为轴心,以2条巷道中线所在平面的法线为轴,旋转γ/2角度,生成新的断面S3,如图9所示。
3)以新的断面S3作为2条巷道相交时的拐弯处断面,利用断面放样功能,分别生成2条巷道,然后通过布尔并集运算,将2条巷道连接在一起,完成对巷道拐弯处的处理。
经过处理后,拐弯处的巷道三维模型会更加准确,并能够解决所有拐弯巷道的异常情况。图9为图8异常情况处理后的效果。

图9 拐弯巷道处理后效果Fig.9 Effect of turning roadway after treatment
4.4 交岔点BIM建模方法
井下巷道错综复杂,存在较多巷道交岔。交岔点是指至少有3条分支的巷道。如果不特殊处理巷道交岔点的数据,三维模型表面不能平滑过渡,巷道内部难以无缝连通,常常会出现穿模、漏面等情况。在实际巷道三维建模中,交岔点模型通常需要耗费大量的人工编辑。
巷道交岔点自动建模算法可分线框、曲面、实体3种建模方法。线框建模缺乏巷道细节的刻画。在线框算法上,朱青等[29]提出了通过扩展巷道中心线交叉点的坐标,计算巷道交叉段侧面“洞”的控制点,生成交叉点模型。张志华等[30]将巷道剖分成弧段以及弧段组成的半巷道体体元,最后对这些半巷道体体元进行建模。线框算法在处理巷道相交的一些复杂情况,例如巷道倾角大时还不够完善。在曲面建模算法上,谭正华等[31]根据实测腰线巷道数据,生成巷道边界轮廓线,以断面轮廓线和巷道轮廓线为控制线,采用约束三角网法生成连通巷道模型。该方法效果较好,但是曲面求交算法比较复杂。
针对上述问题,采用布尔运算来处理交岔点。布尔运算是三维建模的常见方法,主要采用“连接”和“剪切”2种命令实现布尔运算,“连接”可以得到模型的并集,“剪切”则得到模型的差集。直接采用布尔运算进行交岔部分BIM建模的主要过程如下:
1)提取巷道断面的外轮廓线和内轮廓线,分别成一个巷道内轮廓线实体和外轮廓实体。
2)利用Dynamo中布尔差集运算功能,用外轮廓线生成的巷道实体减去内轮廓线生成的巷道实体,就可以得到一个内部连通,且有厚度的巷道三维实体模型。
3)对巷道实体进行离散化,生成三角网模型。
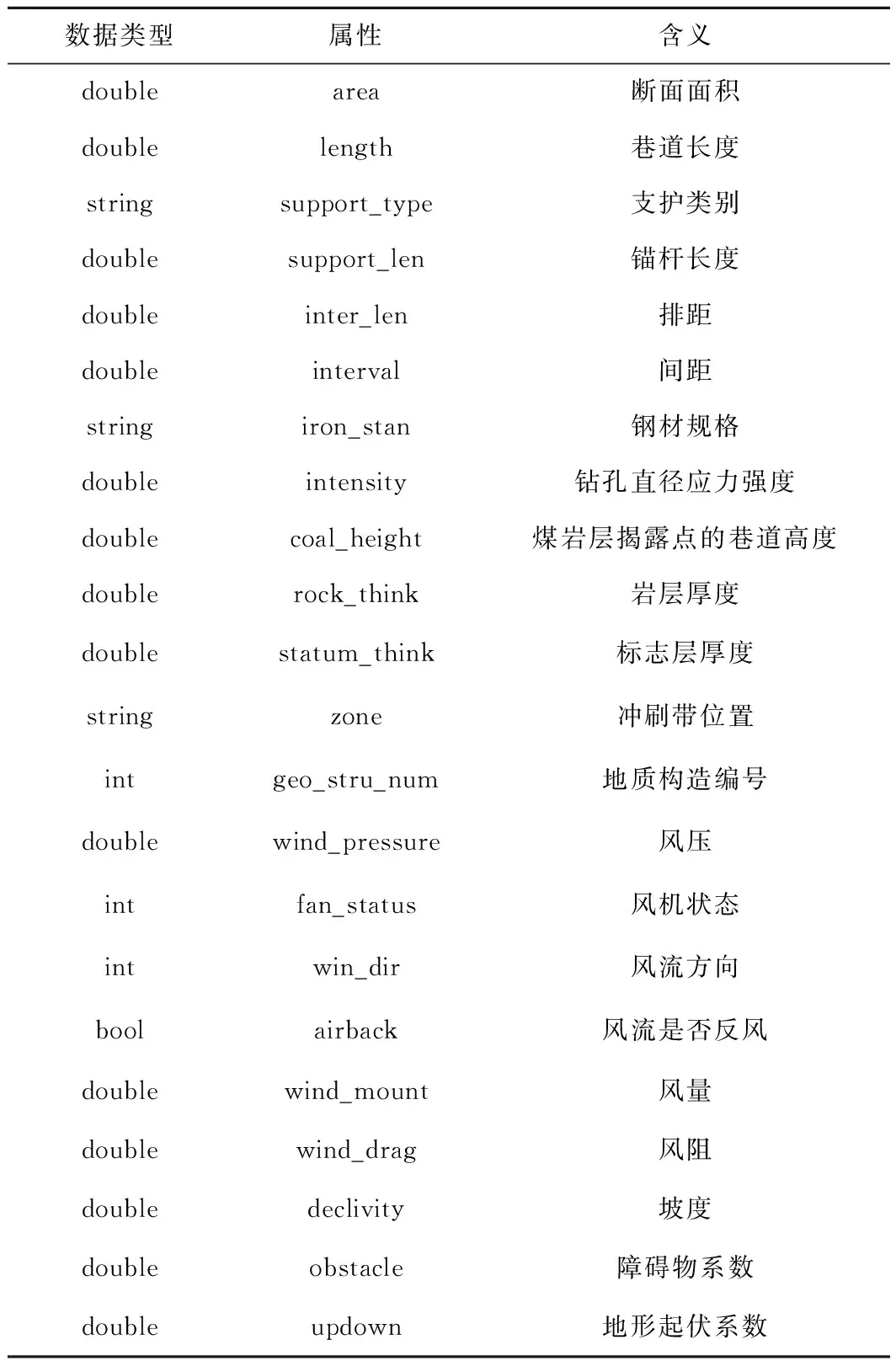
采用朱青[29]提出的线框建模算法与布尔运算算法开展细节比对,观察矩形巷道与拱形巷道求交的具体情况。图11a、图11b是通过连接断面的控制点进行三角面片建模的线框方法生成的模型,图11c、图11d为利用BIM实体建模方法生成的巷道。通过对比红圈部分,可以发现在处理交岔点时模型没有产生凸起,交叉点轮廓形状更平滑,形成的巷道三角网更加密集,形状更加光滑。
图10 线框建模与布尔建模三维模型对比Fig.10 Comparation of roadway 3D models of wireframe and Boolean method
通过参数化的巷道实体模型之间的布尔运算,解决不同断面形态的三通、四通等各类交叉情况。图11a—图11d分别为矩形巷道相交、拱形巷道相交时处理后的渲染图和线框图,图11e、图11f为3条巷道在非同一平面的立体空间内相交时处理后的效果图。通过研究发现:布尔算法较好生成了任意形态和任意角度的巷道交岔点模型。

图11 各类巷道交岔点效果Fig.11 Various intersection model of roadway
5 应用实例
大海则煤矿位于陕北榆横矿区的西北部,面积约280.03 km2,井田含煤岩系为侏罗系延安组含煤地层,矿井设计生产规模为1 500 万t/a。采用主斜井+副立井的开拓方式。结合巷道建模相关的各类设计报告和图形基础数据,提取巷道中线,利用LongruanGIS开展网络拓扑关系编辑,生成标准化xml文件。利用Revit软件的Dynamo插件读取XML文件,进行巷道BIM模型构建,生成54条巷道,并处理100个硐室、44个拐角、160个巷道交岔点。巷道BIM数据支持导出虚幻引擎Unreal4支持的udatasmith格式数据,同时保留了巷道的空间属性信息和其他参数信息;同时也支持导出广泛使用的三维数据共享fbx格式、obj数据,提高BIM模型和其他3D模型之间的数据交换能力。最后导入透明地质系统中,赋予材质、光照及其他素材,呈现出细节丰富的可视化三维模型。利用巷道BIM模型建立的大海则三维巷道宏观效果如图12所示。
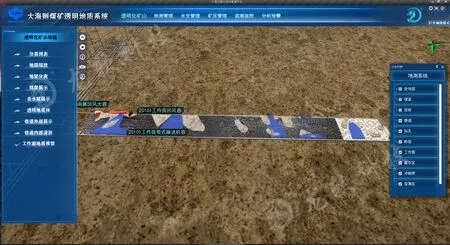
图12 大海则煤矿巷道参数化建模宏观效果Fig.12 Parametric modeling of 3D roadway of Dahaize Coal Mine
5.1 巷道三维模型成果
图13a、图13b给出了20101工作面运输巷与大巷交叉的内部效果和外部效果图。

图13 工作面巷道交岔点三维效果Fig.13 Rendering of intersection in roadway
5.2 巷道三维模型的应用
在大海则透明地质系统中,巷道三维模型用于地质剖面输出、巷道内部漫游、巷道属性查询等基本功能,以及三维避灾线路规划、巷道漫游、人员定位轨迹回放、通风线路模拟、避灾线路模拟等专业应用。巷道地质素描信息查询功能界面如图14所示,根据巷道地质参数调取巷道关联的地质素描。带巷道断面的地质剖面自动生成功能如图15所示,具体算法见文献[32]。

图14 巷道地质素描信息查询Fig.14 Query of geological information of roadway

图15 巷道与地质模型剖面叠加Fig.15 Geological sectional drawing of roadway with roadway
巷道避灾路线的自动生成功能如图16所示,具体算法见文献[27]。

图16 基于巷道拓扑的巷道避灾路线Fig.16 Evacuation rout of roadway based on topological relationship
6 结 论
1)提出的GIS+BIM的巷道三维数据模型保留了GIS巷道网络拓扑关系,充分展现巷道形态、支护等细节,融合了安全生产中与巷道分析相关的支护、通风、地质、避灾等各类参数,实现了巷道信息查询、带巷道断面的地质剖面生成、避灾路线分析等专业应用。
2)采用布尔运算技术,较好地解决了硐室、巷道拐弯和巷道交岔点等巷道建模问题。与线框和曲面建模方法相比,布尔运算方法能够自动化处理任意形态和任意角度的巷道交岔点,模型结构更合理,没有产生模型漏面和不连通等现象。
3)未来应继续拓展巷道三维模型的数据标准化研究,为智能矿山的各类专业应用提供基于Web的三维可视化集成、数据更新、路径导航、避灾路径分析、通风网络解算等专业服务,标准化巷道三维模型能够大幅度减少矿山信息系统中的重复性数据采集、消除信息孤岛,并提高智能矿山的管理水平及工作效率。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
福建中学数学(2023年4期)2024-01-10 06:12:47
中学生数理化·七年级数学人教版(2023年4期)2023-05-11 06:47:32
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
矿产勘查(2020年9期)2020-12-25 02:54:06
——书写要点(三)
学生天地(2018年33期)2018-11-08 08:38:12
学生天地·小学低年级版(2018年11期)2018-01-05 02:51:32
江西煤炭科技(2015年1期)2015-11-07 03:06:32
四川建筑(2015年4期)2015-06-24 14:08:40