
无人机PPK技术在铁路车站改造中的应用
2022-09-21 09:30宋益桥陈红兵
铁道勘察 2022年5期
宋益桥 郭 刚 陈红兵
(中铁二院工程集团有限责任公司,成都 610031)
1 概述
近年来,轻小型消费级无人机日渐普及,无人机遥感技术日也渐成熟,相较于传统测量方式,轻小型无人机摄影测量具有成本低、机动性强、效率高等优势[1-2]。已有许多学者开展相关研究及应用,杨帆等利用无人机摄影测量技术获取矿山三维模型,为矿区治理提供数据支持[3];蔺建强等利用无人机摄影测量获取高精度的校园三维模型[4];王栋等将无人机摄影测量技术应用于大范围地质选线和不良地质识别等方面[5]。
若项目位于地形复杂、无CORS网络信号、遮挡物多的区域,Real Time Kinematic(RTK)工作模式下的无人机作业将会受限。王明栋等利用PPK无人机摄影测量技术对某跨高速铁路区域进行航测,其平面中误差为2.5 cm,高程中误差为3.1 cm[6]。不难看出,PPK作为一种事后动态差分解算的高精度定位方式,结合无人机摄影测量生产三维模型、数字正射影像等测绘产品,对于复杂地形的勘察任务具有较好的适应性[7]。
2 技术原理与方法
2.1 PPK技术原理
PPK是一种利用载波相位事后差分的厘米级全球卫星导航定位技术。其测量原理与RTK即实时差分定位技术相似,都是通过OTF初始化快速确定整周模糊度。因此,只需基站和移动站同时观测两个历元以上,解算基线集再进行差分,即可获取厘米级相对定位精度。两者不同之处在于,RTK利用电台对基站和移动站之间进行数据传输,可实现实时差分改正;而PPK在作业时无需基站和移动站之间有数据链,只需事后进行差分。其作业半径理论上可以达到50 km以上,其作业原理示意见图1。在基站和移动站的通讯造成信号不稳定的情况下,PPK是一种重要的定位测量方式[8-9]。

图1 PPK无人机作业原理示意
2.2 PPK辅助无人机摄影测量原理
传统的航空摄影测量中,需要大量的野外像控点参与空中三角形解算来确定外方位元素,然而,在山区林地布置像控点非常困难。通过PPK技术,集成GNSS模块的无人机可以获得相机在拍摄瞬间像主点中心的空间位置,精度可达到厘米级,由此可减少大量的野外地面控制点的布设[10]。另外,基于PPK的各种优势,可实现一基站多测区,不受数据链中断而影响作业。
2.3 PPK无人机摄影测量作业流程
PPK无人机航测流程大体上与传统航测一致,一般分为3个步骤:飞前准备,航拍作业,数据处理与成图。飞前准备包括航线规划以及像控点布设;PPK无人机航拍作业过程中,无需基站和移动站之间有数据链,各自在同一时间段独自观测星历即可;数据处理与成图阶段利用PPK解算的POS数据结合野外像控点进行空三解算,最后输出4D产品及三维模型,4D产品包括:数字正射影像(DOM)、数字高程模型(DEM)、数字线划地图(DLG)和数字栅格地图(DRG)[11-12]。其中,航高、像片重叠度以及像控点布设是航测流程中的关键技术。PPK无人机作业流程见图2。
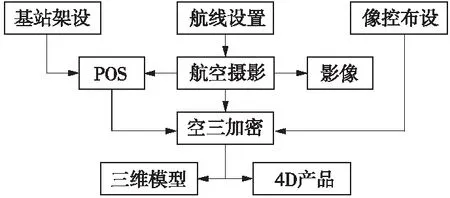
图2 PPK无人机航测作业流程
(1)相对航高设置
航摄高度是无人机摄影测量的关键参数,决定了像片地面分辨率(GSD)的大小。相对航高由航摄相机的各项参数和航摄任务所需的地面分辨率所决定,其计算公式为
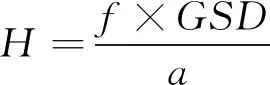
(1)
式中,H为相对航高;f为相机镜头焦距;GSD为地面分辨率;a为像元尺寸。
(2)像片重叠度设置
像片重叠度是指飞机沿航线摄影时,相邻像片之间的重叠程度,一般以像片重叠部分的长度与像幅长度之比的百分数表示,相邻航线之间所保持的影像重叠程度称为旁向重叠度。根据GB/T 7931—2008《1∶500 、1∶1 000 、1∶2 000地形图航空摄影测量外业规范》,航向重叠度为60%~80%,最少为53%;旁向重叠度为15%~60%,最少为8%。当在建筑区域密集的区域,这样的旁向重叠度显然不够,无法进行三维重建,应当适当提升像片重叠度,航向和旁向建议≥70%,但也需要考虑作业效率,不宜将重叠度设置过大[13]。
(3)像控点布设
像控点是摄影测量控制加密和测图的基础,决定了成果精度。具有PPK功能的无人机布设像控点数量较传统单点定位无人机减少80%以上。消费级PPK无人机在小区域(<1 km2)测图时,一般采用四周边均匀布设平高点、四角布设成点组,加少量内部控制点的布设方案[14-15],像控点布设见图3。
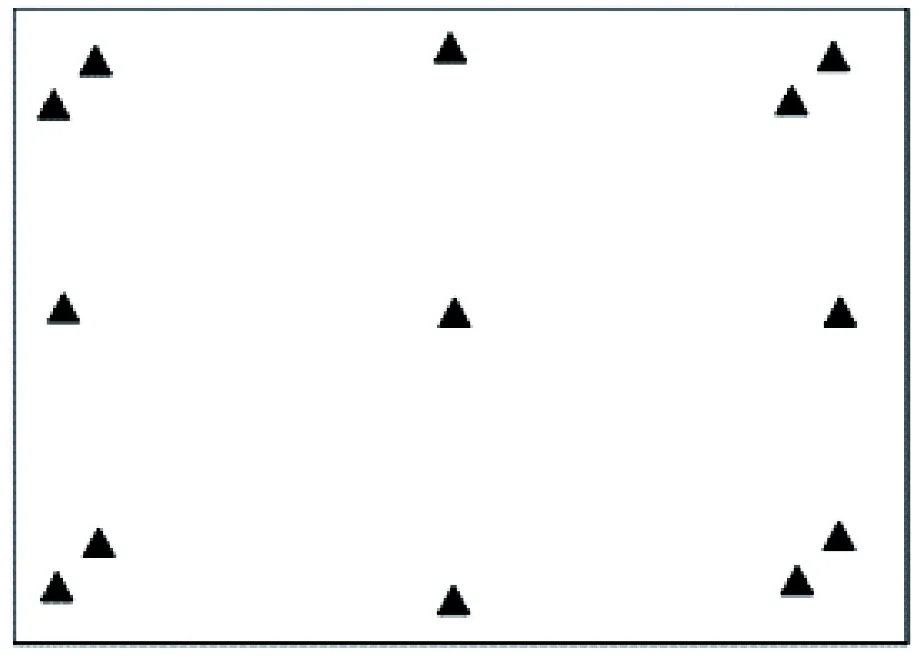
图3 像控点布设示意
3 实验案例分析
3.1 研究区域概况
实验数据选取于四川省某县火车站改建前期勘测项目,测区总面积1.37 km2,测区位于山地丘陵过渡地带,地形复杂,附近CORS信号弱,传统人工测量无法跨越铁路,且效率低;无人机RTK作业也难以开展。因此,决定采用无人机PPK作业方式,以期制作出高精度的三维模型,为站线改建提供高精度且直观的地理信息基础数据。
3.2 PPK无人机作业及数据处理
实验区域面积为0.34 km2,坐标系采用2000国家大地坐标系(CGCS2000),高斯3°带投影,高程基准选用1985国家高程基准,选取其中某一架次数据,采用DJI Phantom 4 RTK多旋翼无人机,设计GSD 为3 cm,相对航高设置为100 m,像控点采用四周边均匀布设平高点、四角布设成点组,加少量内部控制点的布设方案,共布设13个平高点。利用PPK作业模式对该区域进行航拍测量,共获取258张照片。为探究基站和移动站之间的基线长度与成图精度的关系,在无人机航测作业时,距测区分别为1.76 km(S1组),7.04 km(S2组)和12.75 km(S3组)的地方架设3组基准站。分别将S1、S2及S33组基站的数据与移动站经PPK后差分解算,得到3组POS数据。将这3组POS数据和航拍照片导入PhotoScan软件,再结合像控点进行空三加密,再将空三解算后的结果导入到ContextCapture,得到了地面分辨率为2.7 cm的3组三维模型[16-17]。
3.3 精度分析
为验证其测量精度,在测区共布设20个检查点,检查点选择在墙角,路标等明显地物上。在设有明显地物的区域,采用油漆涂画L形标志。在保证同一坐标系统的前提下,分别用RTK实测与三维模型数据做对比,误差统计折线见图4。
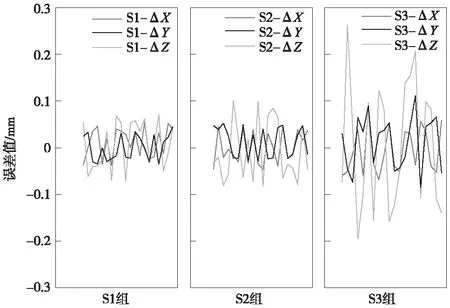
图4 误差统计分布
中误差计算公式为
(2)
式中,m为中误差;n为检查点个数;Δi为各方向RTK实测坐标与三维模型量测坐标差值。各实验组检查点中误差坐标见表1。
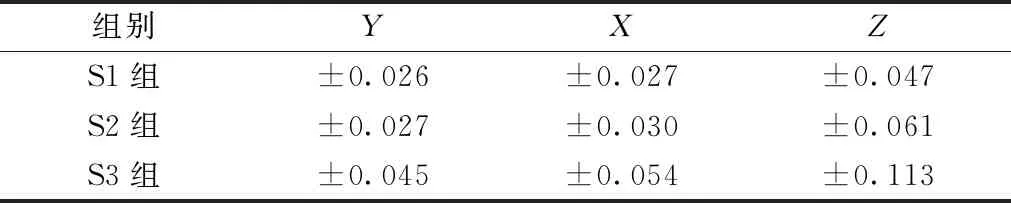
表1 检查点中误差统计 m
由表1可以看出,PPK模式下,无人机航测的平面精度和高程精度均满足GB/T 79330—2008《1∶500、1∶1 000、1∶2 000地形图航空摄影测量内业规范》规定的1:500的航测精度要求。同时,也可以发现,PPK模式无人机航测精度与移动站和基站之间的基线长度关系密切。从图4可以看出,成图精度随着基线的增长而降低,特别是当基线长度大于10 km时,误差显著增长。从PPK解算结果可以看出,S1、S2、S3组的固定解比例分别为94.62%、91.54%和82.62%,基线最长的S3组的固定解比例明显小于S1、S2组,从而影响成图精度。同时,也可以看出,PPK模式无人机航测的平面精度总体优于高程精度。
4 结论
PPK无人机航测在地面分辨率优于3 cm,布设一定数量像控点的条件下,平面中误差可达到0.03 m,高程中误差在0.05 m的精度水平。总体来看,平面精度优于高程精度。并且,随着基站与移动站基线的增长,PPK无人机航测的精度会有一定的下降,当基线从1.76 km增至7.04 km,平面中误差变化不大,高程中误差从0.047 m增加至0.061 m;当基线增加至12.75 km,平面中误差Y方向增加至0.045 m,X方向增加至0.054 m,高程中误差增加至0.113 m。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
科学(2020年5期)2020-11-26
舰船电子对抗(2019年6期)2019-04-27
消费导刊(2017年8期)2018-01-18
北方文学(2017年20期)2017-08-01
北方文学·中旬(2017年7期)2017-07-27
科学与财富(2017年19期)2017-07-19
舰船电子对抗(2016年5期)2016-12-13
全球定位系统(2015年4期)2015-02-28
