
基于线路特性的高速铁路钢轨点云提取分割算法研究
2022-09-21 09:30杨陆冰段晓峰
铁道勘察 2022年5期
杨陆冰 段晓峰
(兰州交通大学土木工程学院,兰州 730070)
线路点云数据包含的结构物丰富,在平面上呈带状分布,在空间上分布复杂,且不同结构物在空间上连接紧密,(如钢轨和轨枕),在研究单个结构物时,需要将其从线路点云中提取分割出来。
目前,在钢轨点云数据提取分割方面,国内外已有许多学者展开研究,ELBERINK等提出将线路点云投影到1 m×1 m的细分栅格,然后利用线路结构物的相对高程进行滤波,再利用随机采样一致性算法进行线性拟合,最后利用钢轨的平行特性和钢轨轨距限制,判断分割后点云是否满足要求[1];ARASTOUNIA等基于图像算法提出一种基于模板匹配的钢轨信息点云分割算法,该方法可以提高精度,但是数据计算量较大[2];许磊等基于点属性提出一种钢轨中线数据自动提取算法,利用激光扫描仪对钢轨和其他线路结构物的激光入射角度不同,从原始点云中快速分割道床及钢轨点云,然后综合半径搜索、矩形分割、高程滤波、形状滤波4种方法,从路基轨道点云中自动提取左右钢轨顶面的点云[3];张东方等提出一种基于3D移动测量系统点云数据的钢轨信息自动提取的方法,解决了大坡度长里程下的线路点云地面点与地物点分离困难的问题,但是计算量也有相应的增加[4];肖源淼等提出一种基于POS线投影的铁路横断面轮廓及轨顶点提取算法,以POS线为辅助线对铁路横断面点云进行切割,采用Alpha Shapes算法提取铁路横断面轮廓点云数据,实现了铁路横断面轨顶点的提取[5];梁涛等提出一种基于连续点云数据的既有铁路轨面信息快速提取算法,通过平面格网法的粗提和多种约束条件下的精提实现轨面点提取[6]。以上方法虽然能实现轨道点云的提取,但是实现过程多较为不易,且有一定的局限性。
另外,解全波等提出一种直通滤波算法,通过设置阈值参数实现对点云数据的过滤[7];李刘轶等提到采用统计滤波算法和半径滤波算法去除离群点[8-9];陈光洲等提出基于条件滤波下的顾及强度信息的点云滤波方法,基于不同被测物体的反射强度不同,通过设置合理参数对点云进行滤波[10];李光等基于PCL点云数据处理库,将基于FPFH特征的SAC-IA粗配准,与使用迭代最近点算法(ICP)的精配准方法合并使用,实现矿场环境点云配准[11];邹纪伟等提出基于区域增长与欧氏聚类相结合的点云分割方法,该方法通过区域增长将激光点云中的典型地物分为树杆类及建筑类,然后分别对这两大类地物设置不同阈值,采用欧氏聚类算法将个体单独分割开来[12-13]。
1 线路点云滤波
点云滤波是点云数据处理的第一步,在进行滤波时要充分考虑点自身包含的数据信息特点,然后结合被扫描物体的结构特征,比如线路结构的几何约束。二者综合起来,从而提高算法效率及精度。
1.1 基于点属性的“intensity”反射强度条件滤波
强度是反映某点的激光雷达脉冲回波强度的一种测量指标。不同地物对于激光雷达的反射程度是不一样的,可通过强度信息把不同地物区分开。例如,通过强度区分接触网电线杆、路基边坡、轨枕、钢轨等。
实验数据来自于银武高速铁路车载激光雷达扫描仪获取的线路点云数据,每一个点都包含了三维坐标信息,同时还包含颜色信息、反射强度信息等。对于包含反射强度信息的线路点云数据,其在钢轨顶面处的反射强度数值与轨枕、道床、接触网、路基边坡的反射强度数值存在量级差。基于这这种量级差关系,在条件滤波中,将滤波条件设置为“反射强度”,给定合适的阈值范围,再将钢轨顶面的点云从道床轨枕中抽离出来。
1.2 基于线路几何约束的条件滤波
铁路线路纵坡是线路纵断面上同一坡段两点间的高差与其水平距离之比,一般以千分率表示。高速铁路的线路纵坡坡度一般不超过15‰。故其沿线路方向的高程变化小,结合实验数据沿线路方向的高程变化特点,通过给定阈值范围,过滤掉一定范围内的路基边坡和接触网的点云数据。
1.3 基于点属性和线路几何约束的融合滤波
设置好反射强度和高程方向的阈值范围,在“VS+PCL+QT”框架下运行程序,滤波完成后获得左右股钢轨顶面的点云数据,两试验段线路的初始点云见图1、图2,滤波完成后的点云见图3和图4。钢轨顶面的点云数据已经完整地从线路点云中提取出来。

图1 试验段1初始线路点云
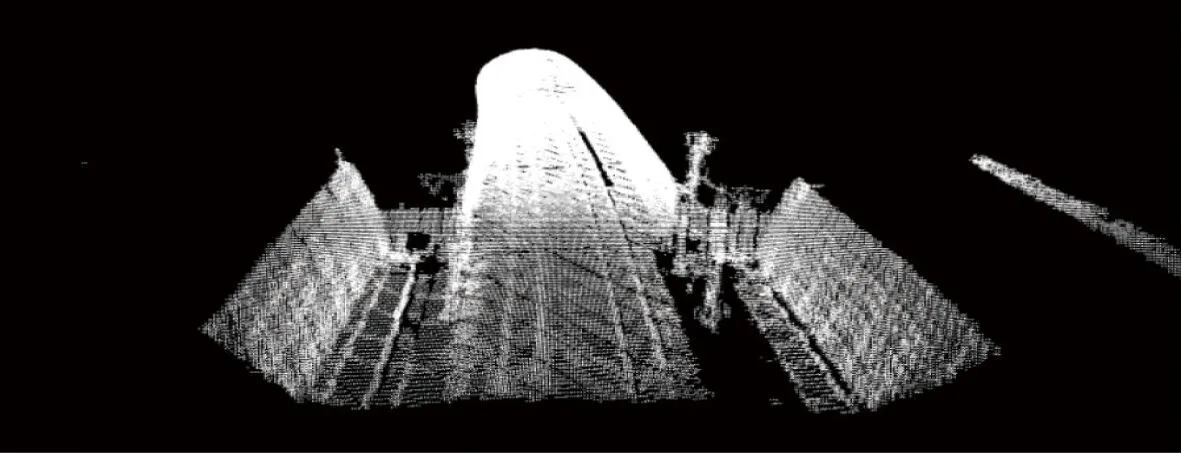
图2 试验段2初始线路点云

图3 试验段1 滤波完成后的线路点云

图4 试验段2 滤波完成后的线路点云
线路初始点云数量见图5、图6,试验段1有初始点云19 670 786个,试验段2有初始点云19 962 104个。经过“intensity” 和“z”值滤波过滤后,分别剩余86 802个和73 268个,轻量化率为99.55%和99.6%。不难看出,该算法可有效过滤掉接触网、路基边坡、轨枕、道床等线路结构,极大地轻量化了数据,但仍然存在少量离群点,需要再次进行过滤。

图5 试验段1滤波前后的点云数量对比
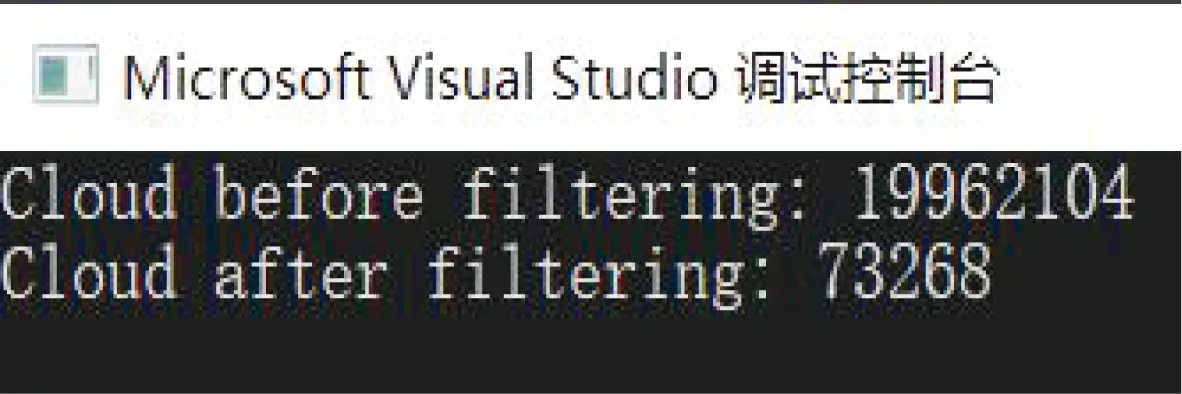
图6 试验段2滤波前后的点云数量对比
1.4 基于点属性的统计滤波
统计滤波会对每个点的邻域进行统计分析,并过滤掉那些不符合算法设定标准的点。对每个点,算法会计算其到所有邻近点的平均距离。平均距离在阈值范围之外或一个点集内点的个数不满足要求,被定义为离群点,并从数据集中去除。
由于钢轨点云是连续的,因此,把钢轨的连续点云假设为一个点集,且这个点集内包含若干个点,而离群点作为一个点集,其包含点的数量远小于钢轨点云数量。因此,对这些离群点,可以通过点与点的距离和点集内包含的点的数量关系进行统计滤波(见图7、图8)。可以明显看出,大部分离群点被过滤。滤波算法流程见图9。

图7 试验段1 去除离群点后的点云

图8 试验段2 去除离群点后的点云
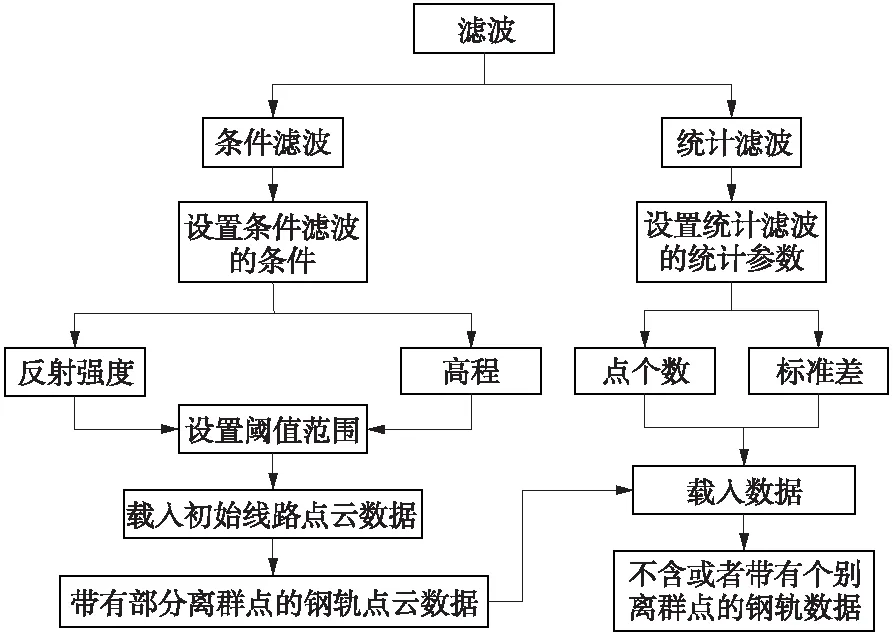
图9 滤波算法结构框架
2 基于空间位置关系的钢轨分割
欧式距离分割可基于区分邻里关系远近来完成,欧几里得算法使用邻近点之间的距离作为判定标准,在设定的阈值距离内的点被聚为一类,实现方法如下。
(1)对于空间某点P,通过kd-tree近邻搜索算法找到k个离P点最近的点,判断这n个点到P的距离。将距离小于阈值的点P1,P2,P3,…放在Q1类里。
(2)搜寻下一个点,重复第一步的操作,直至Q1类里无法加入新的点。
(3)参考第一步和第二步,会有Q1-Qn个类来存放这些符合距离阈值的点。
(4)当Qn中不能加入新的点时,则完成搜索。
欧式分割算法流程见图10。欧式聚类算法中,通过距离阈值设定来筛选点加入类。由于钢轨的左右股间距远大于单侧钢轨顶面邻近点之间的距离,且钢轨点云有呈带状分布的特点,故设置合理的阈值范围,可以将单侧钢轨点云完整地提取出来(见图11、图12)。其中,每一种颜色都表示一个聚类Qi,且会生成相对应的pcd格式的文件并将点云数据保存下来。其中,“cloud_cluster_0.pcd”到“cloud_cluster_3.pcd”为有效的单侧钢轨点云数据。当得到单侧的钢轨点云数据后,可以进行后续线路中心线拟合,钢轨建模等操作(见图13、图14)。
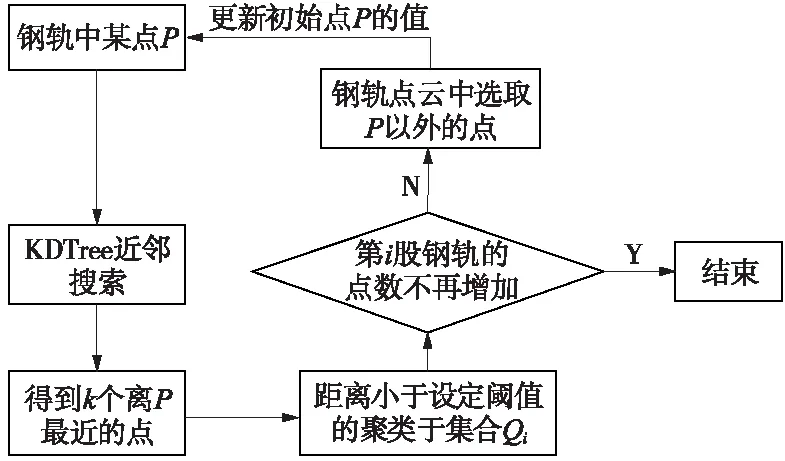
图10 欧式聚类算法结构框架
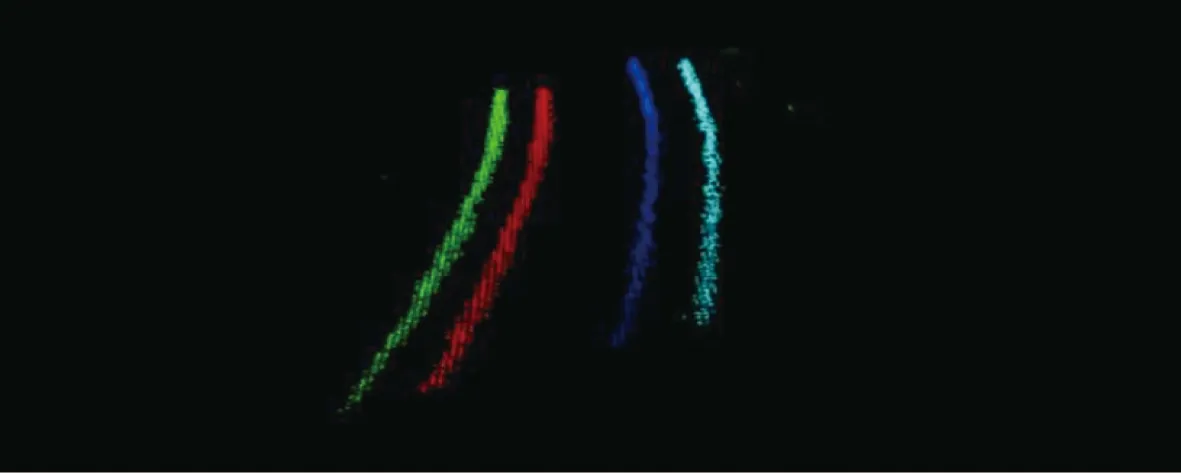
图11 试验段1 分割完成后的单侧钢轨点云

图12 试验段2 分割完成后的单侧钢轨点云
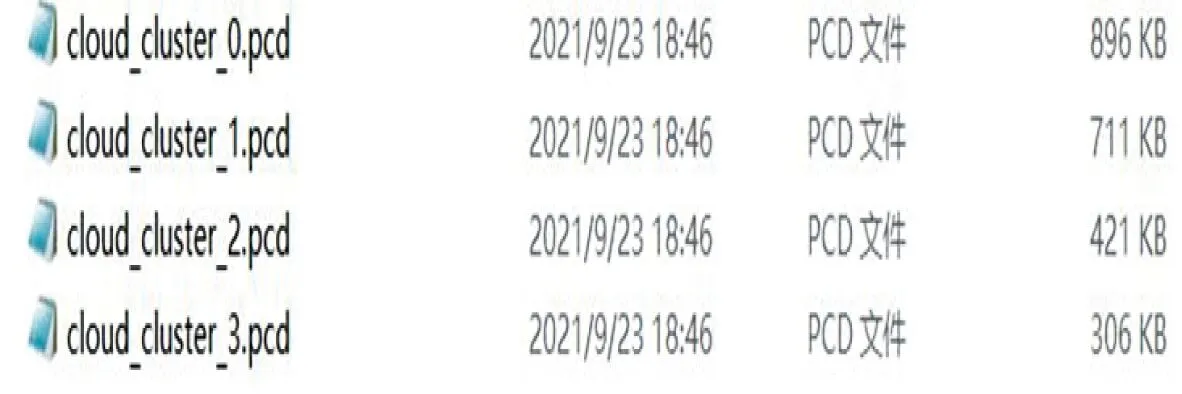
图13 试验段1的单侧钢轨点云文件

图14 试验段2的单侧钢轨点云文件
3 钢轨顶面点云提取结果评价
为评价提取的钢轨顶面的点云精度,采用完整度c和准确度p两个指标来对提取结果进行分析[14-15],可定义为
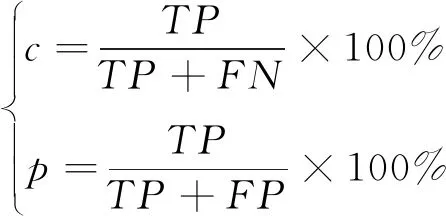
(1)
式中,TP为正确提取的钢轨顶面点云数量;FN为未能提取到的钢轨顶面点云数量;FP为错误提取的钢轨顶面点云数量。
通过手动方式,将两试验段的钢轨顶面点云从完整的线路点云中裁剪出来,并与已经提取完毕的钢轨点云进行对比。计算上述2个评价指标,分析结果见表1,其各项指标值均在90%以上。通过算法提取的钢轨点云在完整度和准确度上均满足要求,而且算法可以通过控制阈值和参数进一步完善提取的结果。表1中的结果表明,该方法可以较好地实现钢轨顶面点云的提取。
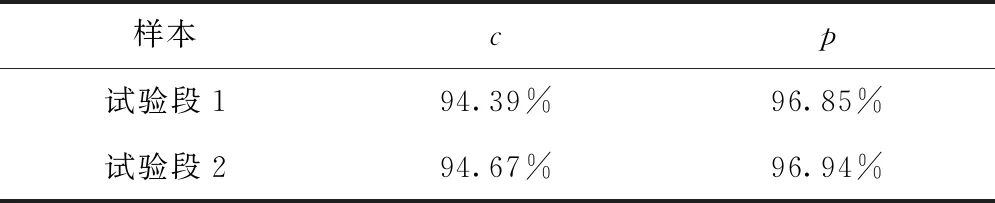
表1 轨顶点云提取精度分析
4 结语
结合激光雷达扫描仪获取线路点云数据的特点,紧密围绕线路特性,包括材质差异(不同线路结构的激光反射强度数值差异)和铁路线路线型特征(铁路线路纵坡变化小的特点),采用条件滤波算法,首先就将钢轨点云从海量的线路点云中提取出来,获得初步的钢轨点云;再对钢轨点云进行离群点去除,然后根据左右股钢轨间的空间位置关系,对钢轨进行分割。研究表明,该方法步骤简洁,在准确性上也满足要求。
猜你喜欢
中国听力语言康复科学杂志(2022年1期)2022-11-21
计算机与现代化(2022年10期)2022-10-18
建材发展导向(2022年18期)2022-09-22
体育科技文献通报(2022年3期)2022-05-23
西北工业大学学报(2021年3期)2021-07-12
保健与生活(2020年1期)2020-05-07
小型微型计算机系统(2018年8期)2018-09-07
环球市场信息导报(2017年36期)2017-12-24
中国核电(2017年2期)2017-08-11
建材发展导向(2016年6期)2017-01-17
