
测量黏弹性材料力学特性的微型液压驱动机构
2022-09-15 09:15李伟王勇
机床与液压 2022年11期
李伟,王勇
(1.江苏食品药品职业技术学院机电工程学院,江苏淮安 223003;2.江南大学机械工程学院,江苏无锡 214122)
0 前言
近年来,机器人在医学和生物工程领域得到了越来越多的应用,如先进的达芬奇机器人手术系统。机器人可以在手术过程中通过触摸器官来辨别其状态,这是因为生物体的病理变化通常会改变其力学特性,如硬度和黏度。机器人的这一功能类似于医生的触诊,因此确定黏弹性材料(生物组织)的力学特性至关重要。
如上所述,自动化触诊功能的关键是黏弹性材料力学特性的测量。GARG等设计了一种基于高斯过程自适应采样的自动触诊肿瘤定位系统。在机器人辅助微创手术过程中,该系统通过触觉传感器估计肿瘤的状况,但是测量精度较差。这是因为传统力学传感器的测量精度往往会随着传感器尺寸的减小而降低,如压电传感器。YIM等构建了可变形物体黏弹性和力摩擦响应的数据驱动触觉模型,使用一种扩展的数据驱动触觉再现方法,能够在大的表面区域上估计推拉交互过程中的力响应。但是该方法依靠数据驱动,需要大量的训练样本数据构建模型,导致实际情况中的适用性较低。
因此,提出一种可精确测量黏弹性材料力学特性的微型液压驱动机构。该微型液压驱动机构通过估计末端执行器的位移,确定目标物体的位移和作用在目标物体上的力;通过开尔文模型和标准线性体模型,计算得到其刚度和黏度系数。对黏弹性材料进行测试,验证该微型液压驱动机构及估计模型的可行性和有效性。
1 两种估计模型
生物组织通常被认为是黏弹性材料。为实现自动触诊系统,利用弹簧和阻尼器的组合测量黏弹性材料的力学特性。采用两元的开尔文模型和三元的标准线性体模型。两元的开尔文模型如图1所示。
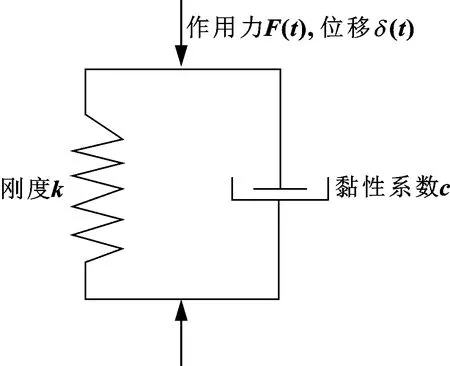
图1 两元的开尔文模型
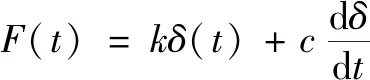
开尔文模型的基本方程为
(1)
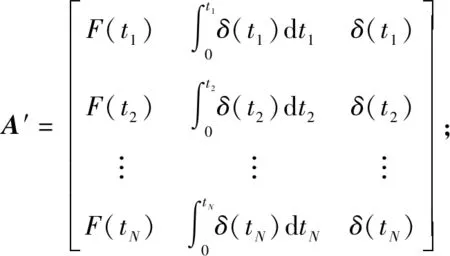
每个样本测量得到的()和()均是离散数据。在开尔文模型中,推导方程如下:
=
(2)
其中:


式中:为任意时间间隔的作用力矩阵;为位移矩阵;为和的矩阵;为任意时间。
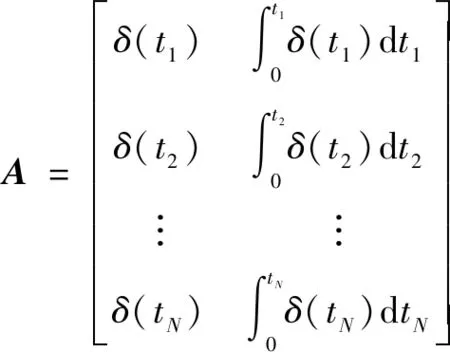
三元的标准线性体模型如图2所示,、为刚度。
图2 三元的标准线性体模型
三元的标准线性体模型的基本方程为

(3)
其中:

标准线性体模型也可表示为
=′·′
其中:同式(2)中。

成本函数的计算公式为

(4)
对式(4)采用偏微分求最小值,以使测量值的误差最小。

(5)
=
(6)
因此,参数表示为
=()
(7)
2 微型液压驱动机构设计
2.1 机构模型
所提微型液压驱动机构模型如图3所示。
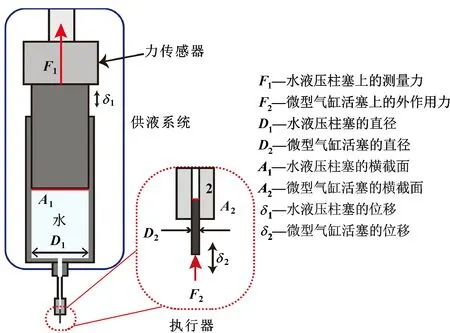
图3 所提微型液压驱动机构模型
该机构使用末端执行器作为力传感器,其尖端用微型气缸制成。当水液压气缸工作时,微型气缸的活塞发生移动。如果外力作用在机构的尖端,就可以确定微型气缸内部的压力,即通过观察内部压力的变化测量外作用力。
此外,利用帕斯卡定理放大外作用力,放大系数为尖端的横截面与供液气缸横截面的比值。因为不考虑高压,该机构中使用的流体被视为非压缩流体(高压应该考虑体积变化)。根据帕斯卡定理,作用力放大比表示为
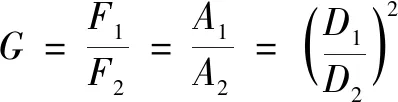
(8)
使用所提微型液压驱动机构的触诊系统如图4所示。
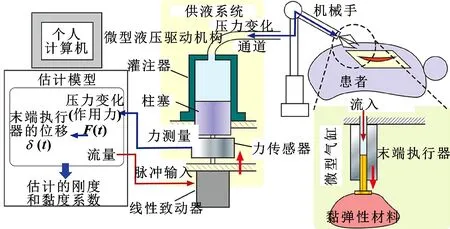
图4 使用所提微型液压驱动机构的触诊系统
利用个人计算机进行脉冲控制,实现直线驱动器的精确运动。微型液压驱动机构接触物体并测量反作用力及其位移。然后,根据离散的位移和载荷数据,分别通过开尔文模型和标准线性体模型估计接触物体的刚度和黏性系数。
2.2 末端执行器
制备内径分别为1.6、1.1和0.5 mm的微型气缸。所有气缸杆的表面粗糙度均为1.6 μm。所有气缸的间隙为0~0.005 mm。微型气缸原型如图5所示。
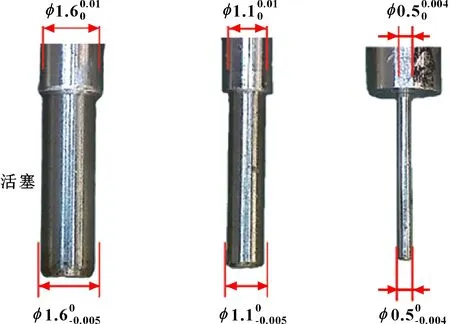
图5 微型气缸原型
如式(8)所示,当机构尺寸缩小时。变小、增大,即在该机构中,可通过缩小末端执行器来实现高测量精度。但末端执行器运动的位置分辨率也会随之降低,所以缩小尺寸是有一定限制的。为确定最佳尺寸,测量和的关系。将微型气缸连接在电子天平上,水液压装置向微型气缸供水,微型气缸推动电子天平(校准精度±10 mg)。同时,微型气缸受到反作用力,是由电子天平测量的外力,是由载荷传感器测量的力。和之间的关系如图6所示。
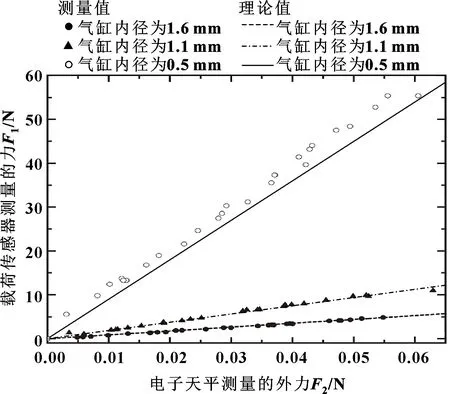
图6 F1和F2之间的关系
由图6可知:和成正比,比值与横截面积比相同;采用0.5 mm的微型气缸可以获得超过459倍的力增益。因此,通过缩小执行器尺寸提高了测量精度。然而,由于在高载荷时会产生不均匀分布,因此高载荷的测量具有很大的分散性。此外,内径1.1、0.5 mm的微型气缸移动不平稳,收益与帕斯卡定理所期望的理论值不同,主要是气缸内表面摩擦导致的。然而,内径1.6 mm的微型气缸移动很平稳。这是因为该微型气缸比其他气缸大,所以内表面的粗糙度相对较小。摩擦会影响力学特性的测量,因此使用内径1.6 mm的微型气缸进行后续的力测量实验。
2.3 供液系统
微型液压驱动机构的供液系统如图7所示:线性致动器采用东方DRB60UA4-05NA步进电机;应变片式载荷传感器的型号为英斯特朗KN 5590HVL,载荷能力为500 N。考虑到噪声,测力分辨率为37.1 m·N。使用内径1.6 mm的微型气缸原型。
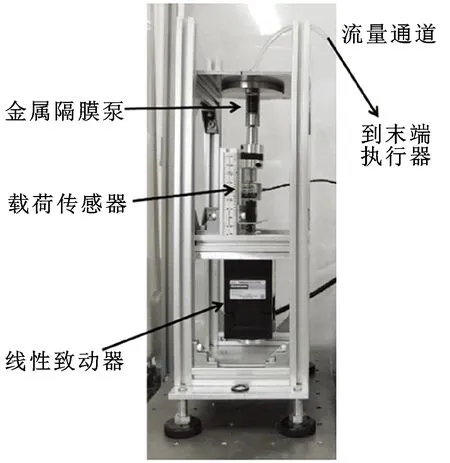
图7 微型液压驱动机构的供液系统
3 实验结果与分析
3.1 测量对象
通过改变水含量并与硼砂、透明淀粉和水混合,制作3种不同硬度的聚乙烯醇(Polyvinyl Alcohol,PVA)凝胶作为测量对象。测量对象如图8所示。3种测量实验对象的含水率如表1所示。
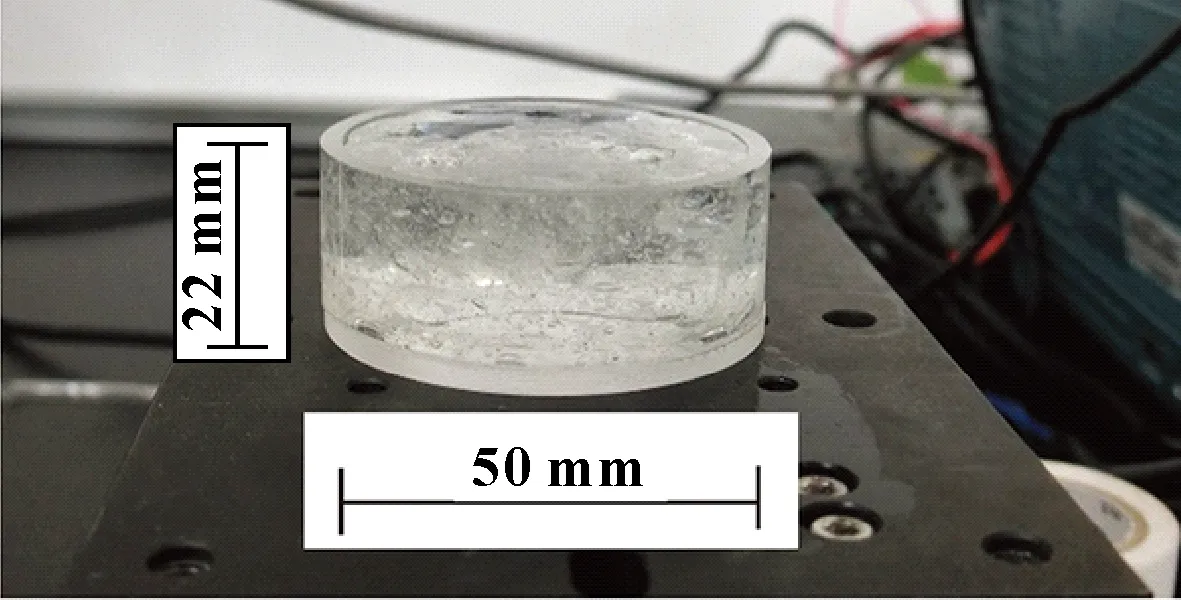
图8 测量对象
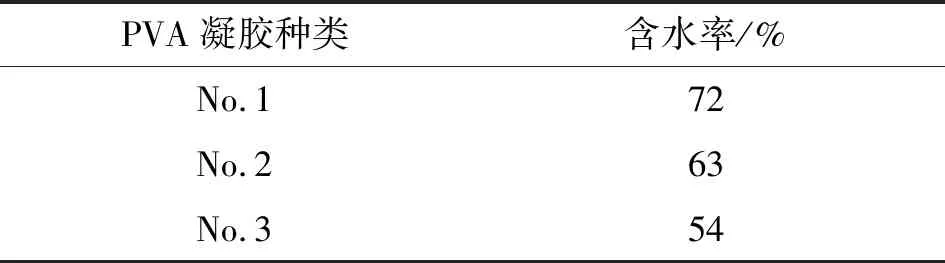
表1 3种测量对象的含水率
3.2 蠕变实验
首先,进行一个正常蠕变实验。在测量对象上放置一块直径为30 mm的2 g薄钢板,以防止任何表面变形的影响。蠕变实验设置如图9所示。
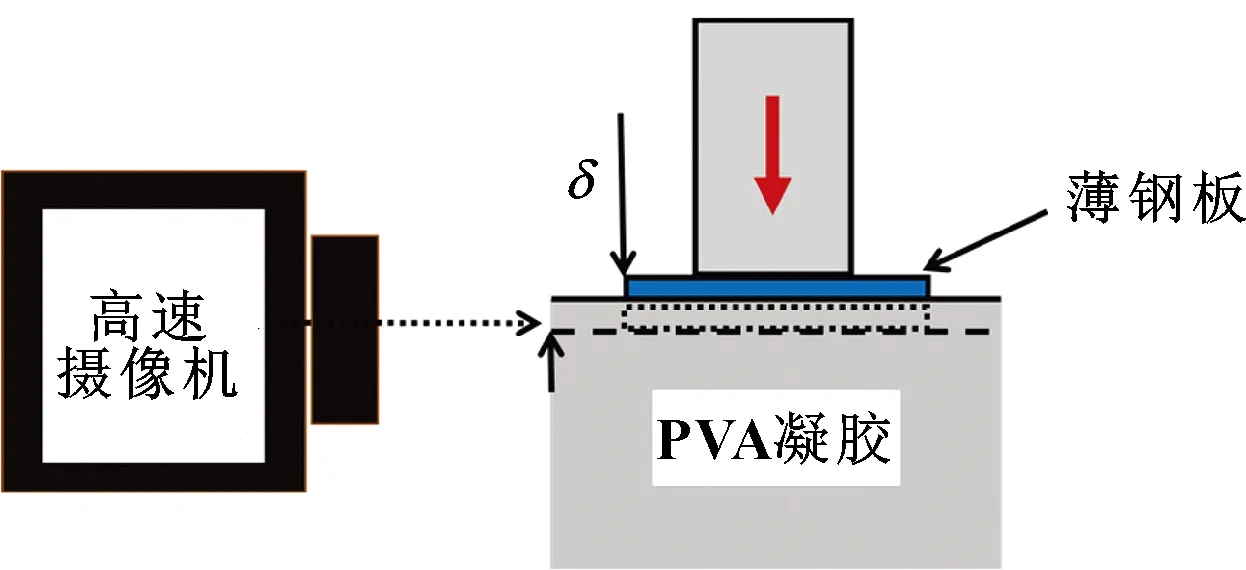
图9 蠕变实验设置
采用卡西欧EX-100高速相机以120 帧/s拍摄实验对象的变形,并使用图像分析软件Halcon 9.0分析其位移。测量对象的蠕变实验结果如图10所示。
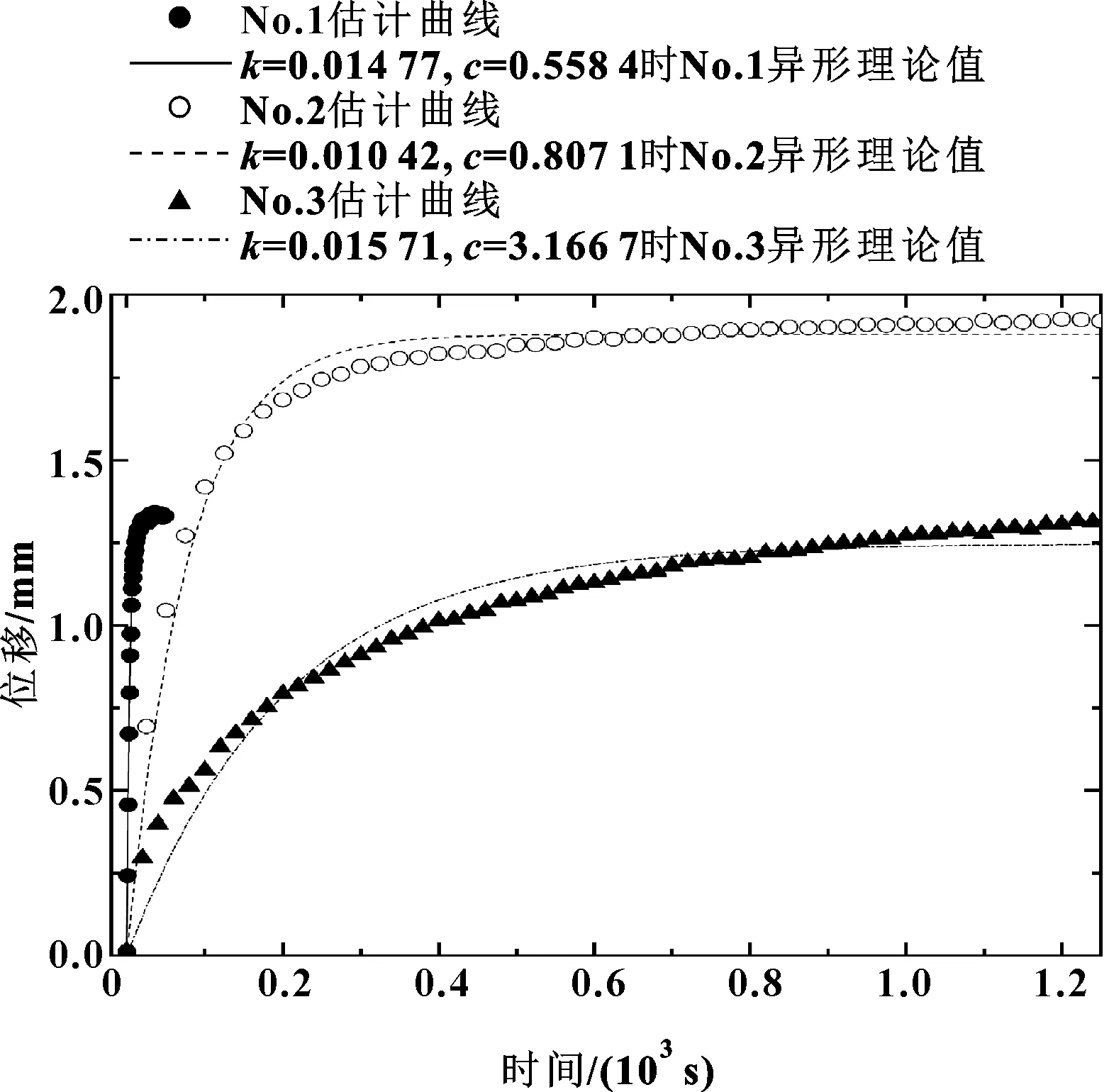
图10 测量对象的蠕变实验结果
由图10可知:No.1的异形曲线与估计曲线近似重叠,No.2和No.3的理论值只有部分与估计曲线略有不同;No.1的变形时间短、采样快,因此100 s后无数据。
3.3 力学特性测量
利用所提微型液压驱动机构对3种测量对象进行力学特性测量(刚度和黏度系数),采样间隔均为20 ms。在测量对象上放置与蠕变实验中相同的薄板,以防止任何表面变形的影响。采用高速摄像机测量目标物体的位移,供给流量为176.7 mL/s。内径1.6 mm微型气缸的测量实验如图11所示。
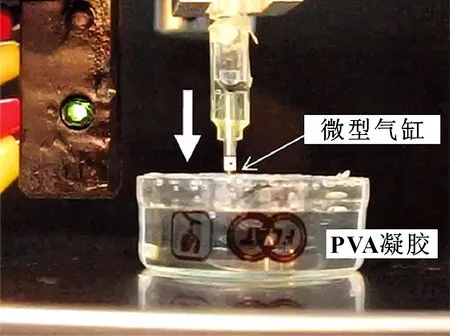
图11 内径1.6 mm微型气缸的测量实验
使用微型气缸测量的反作用力和位移如图12所示。可知:反作用力随微型气缸位移的增大而增大,停缸后反作用力基本保持不变;随着反作用力的增大,测量对象的位移也增大,这与蠕变实验结果一致。

图12 使用微型气缸测量的反作用力和位移
根据微型气缸测得数据,使用标准线性体模型识别出的力学特性如表2所示。
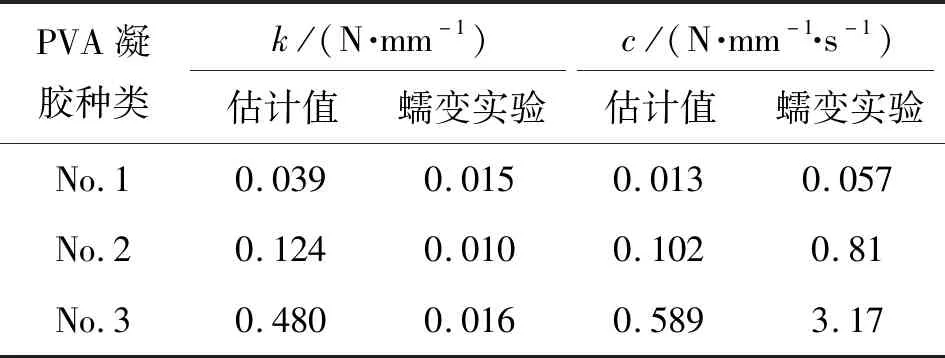
表2 使用标准线性体模型识别出的力学特性
由表2可以看出:对于No.1凝胶,该模型计算得出的值与蠕变实验的值在相同数量级上,值也是如此;对于No.2凝胶和No.3凝胶,该模型计算得出的数值与蠕变实验的数值则存在较大的误差,无法满足精确测量的要求。同样,根据微型气缸测得数据,使用开尔文模型识别出的力学特性如表3所示。
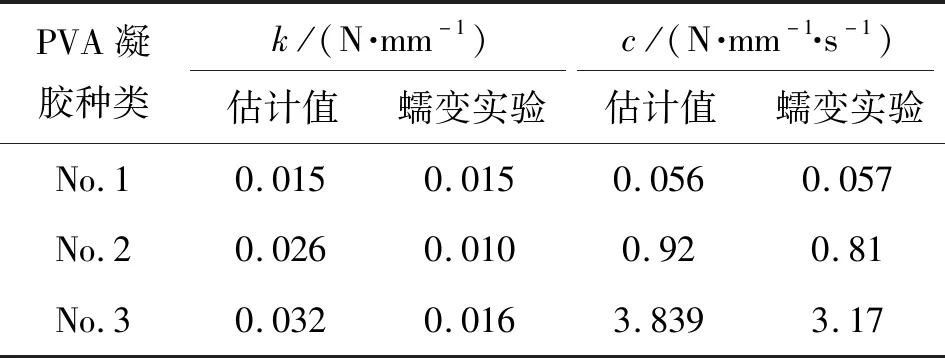
表3 使用开尔文模型识别出的力学特性
由表3可以看出:对于No.1凝胶,相比标准线性体模型,利用开尔文模型计算得出的值与蠕变实验的值几乎一致,值也是如此;对于No.2凝胶和No.3凝胶,和与蠕变实验存在误差,但仍能保持在相同数量级上。误差产生的原因可能是微型气缸内的摩擦和漏水。摩擦力是由表面粗糙度引起的,漏水是由气缸杆与气缸内表面间隙过大引起的。为实现更高精度的反作用力测量,必须减小气缸内的间隙和表面粗糙度。总体来说,采用开尔文模型的微型液压驱动机构可以实现较高精度的黏弹性材料力学特性测量。
4 结论
本文作者开发了用于识别黏弹性材料力学特性的测量系统,其刚度和黏性系数利用开尔文模型和标准线性体模型进行计算确定。在不同硬度的聚乙烯醇(PVA)凝胶上进行了蠕变实验和测量验证,得出如下结论:
(1)该机构可通过缩小微型气缸实现高测量精度。但是缸内的摩擦会影响力学特性的识别,所以缩小尺寸是有一定限制的。
(2)相比标准线性体模型,采用开尔文模型估计出的刚度和黏性系数最接近真实值,能够满足机器人触诊系统中高精度力学特性测量的需求。
(3)测量误差产生的主要原因是微型气缸内的摩擦和漏水。
后续将针对该机构中的末端执行器尖端,即微型气缸进行适当的改进,以进一步减少测量误差。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中国应急管理科学(2022年2期)2022-05-23
化学教学(2022年4期)2022-05-07
读与写·教育教学版(2019年9期)2019-10-30
中国新技术新产品(2018年19期)2018-12-08
卷宗(2018年14期)2018-06-29
农民致富之友(2018年7期)2018-05-04
小资CHIC!ELEGANCE(2018年8期)2018-04-03
科技创新导报(2016年9期)2016-05-14
高中生学习·高三版(2016年9期)2016-05-14
