
基于河道水域与陆域地形量测的技术研究
2022-09-14 05:39刘立杰
水利科学与寒区工程 2022年8期
刘立杰
(绥中县水利事务服务中心,辽宁 葫芦岛 125200)
1 点位选择
遵循以下原则合理选择控制点点位:安装与操作接收设备方便,视场范围内测物高度角不大于15°;距离大功率无线电发射源不少于200 m,距离无线电传输通道与高压电线不少于50 m;周边无信号反射强烈的构件,且能够联测或扩展其他测量技术;地面基础稳定符合长期保存标识的要求,合理利用已有控制点;为减少气象元素的代表性误差应尽可能使周边的大环境与测站附近的局部环境一致,如植被、地貌和地形等。
(1)GNSS静态相对定位测量。选择控制网等级E级和GNSS静态相对定位测量实现河道地形测量,控制网主要有约束平差后最弱边相对中误差、比例误差系数、固定误差、平均边长等技术指标,控制最弱边相对中补差不超过1/20000。作业基本技术要求包括观测时段数与时段长、卫星高度截至角、观测卫星数等,以GPS网总点数中二次设站点数百分比作为最低观测时段数。
一般选用经评定的商用软件对静态观测数据进行后处理,计算过程主要有约束网平差、无约束网平差和基线解算等内容,改正数、较差绝对值、坐标分量闭合差等参数应符合规范要求。
(2)GNSS实时动态定位测量。一般有单基站RTK和网络RTK两种GNSS实时动态定位测量方式,其中用户以单基站RTK实时动态定位测量时需要一台流动站、一台基准站和两台GNSS接收机,基准站至流动站的距离与流动站坐标测量精度有关,各类误差在二者距离较近时保持同向,差分后具有较高的精度,各类误差在二者距离较远时不同向,其点位精度较低,一般控制基准站与流动站之间的距离不超过5 km。
以持续显示固定解作为GNSS实时动态定位测量开始观测时点,各点必须独立初始化两次,且每次采集两组,采集时间间隔不应低于10″,控制成果可以取4组数据的平均值或其中任一组数据。
2 测量方法
2.1 水域量测方法
综合考虑水流速度、水深及河道宽度合理选择河道整治工程水域地形测量方法。一般测探仪无验潮作业+GNSS实时动态测量模式适用于大深河道,而GNSS实时动态测量水位点三维坐标法和测深杆+断面索作业模式适用于窄浅河道,然而受人为作业及流速难以避免的误差影响,利用GNSS实时动态测量时通常水深点高程误差偏高。针对以上3种方法,采用回声测深仪与GNSS实时动态测量无验潮水深具有较高的精度,回声测深仪水深测量和GNSS实时动态测量均可影响其精度。
单基站RTK测量及网络RTK测量是GNSS实时动态测量的两种方式,为保证高程成果的高精度两者必须求解区域七参数,控制各重合点平面、高程转换残差不超过2.0cm和2.5cm。附近参考站至网络虚拟发送的差分数据被流动站获取后,利用网络RTK测量测点的高精度三维坐标,各测点三维坐标在测区内应均匀分布,虽然该技术需付费使用,但在实际工程中的应用日趋广泛;基准站发送的卫星星历误差、卫星钟钟差、对流层延迟、电离层延迟等差分数据,由单基站RTK流动站接受后即可测点的高精度三维坐标,通常由电台提供数据通信链路,为保证通讯顺畅电台一般架设在高点,流动站至基准站的距离与其测量精度直接相关,距离越远则测量精度越低,距离较近情况下基准站与流动站的各类误差相差不大,经差分即可确定测点三维坐标。
采用回声测深仪测量水深前,应合理设置换能器与GNSS接收机中心偏差改正、声速、吃水深、天线高、投影参数等,其中投影设置主要是水面高程、水深点高程及其坐标,对比水深测量成果与实际水面高程判定其可靠度与精准性。将量取的GNSS天线高数据输入测深仪,鉴于不同类型的GNSS接收机改正值不同且测深仪往往没有天线高固定差改正功能,正确的天线高宜按照量取的天线高及正确的水面高程精准计算,较正确的天线高直接输入量取的天线高低8~12 cm,这显著影响着水深点高程成果。换能器的持水设置要考虑边坡测量时浅水区域覆盖及水深测量全过程的安全,测量过程中控制水深不超过30~50 cm,若吃水过浅极易造成部分数据的丢失和船舶转弯时出现假水深。一般地,可通过比对塔或板尺量取的实际水深获取河道内的声速值,大多位于地势平坦区,利用导航软件完成相应的计算,一般河道内水深不大于5 m,声速值误差并非引起水深误差的主要因子;采用大型船舶测量时设置转能器与GNSS接收机中心偏差改正,对于河道测量应用较少,该过程主要是改正水深点平面位置。在水深测量时测量船应保持匀速航行,控制速度处于6~8节,船速过快易导致换能器不能在测量位置正下方,即沿航向船体发生倾斜,使得最终的水深测量数据整体偏高。
2.2 陆域量测
一般以河口线外10~20 m至驳岸作为河道整治工程陆域测绘区间,量测内容主要有雨污排放口、绿化、围墙、涵洞、桥梁、码头、驳岸、两岸建筑物、防汛通道,以及管线设施等,测量地形特征点高程、地物位置及尺寸,为保证水域与陆域接边精度应开展接边测量。
电磁波测距三角高程法+全站仪极坐标法是陆域测量的常用方法,可测定地物的高程和地方坐标,该方法具有测量精度高、环境要求低等优势,但作业效率相对较低,一般需要两名及以上技术人员。采用GNSS实时动态测量法可直接测定电磁干扰少、周边高层建筑少的地形地物点三维坐标,区域空间转换七参数必须在该方法使用前期就获取,正式开始测量前要对未参与解算的至少2个控制点三维坐标进行验证,控制高程较差、平面坐标较差不超过3cm和2cm,对于无法获取固定解(GNSS信号不良)的情况,对底细地物点三维作用宜选用全站仪测量。
近年来,随着科技的快速发展,无人机倾斜摄影测量技术被越来越多的应用于1∶500、1∶1000等大比例尺测图项目,在技术人员难以达到、植被覆盖少、测区面积大的区域其优势明显,具有受干扰因素少、数据采集直观、劳动强度低、作业效率高、精准度高,以及全面性好等优点。一般河道整治项目线路长,其分布形式大多呈带状,传统的人工测量作业效率低、耗时耗力,并且有的测区很难进入施测,无人机倾斜摄影测量技术对全面测绘测区地形具有重要意义,大大提高了外业作业效率,有效弥补了人工难以施测的缺陷。然而,在实际测量过程中倾斜摄影技术还存在一定缺陷,主要体现在以下几点:①考虑飞行安全及荷载限制,无人机倾斜摄影尚存在电池续航能力的技术壁垒;②模拟地物地貌表面全自动建模时,房屋遮挡和植被覆盖等区域容易产生模型扭曲变形;③无法全自动提取地形要素,人工辅助识别易出现漏判或误判。因此,全面踏勘测区并制定相应的测量方案是采用无人机倾斜测量技术测绘河道整治工程的基本要求。
2.3 测量控制
(1) 高程控制。软土地区和地质条件较好地区的河道高程控制水准测量宜选用附合水准线路、闭合水准线路,其观测等级不应低于4级。城市等级水准点周边的市政建设以及软土地区地面沉降量较大时,对稳定性会造成影响,水准路线必须附合在两个已有水准点上以保证已有水准点成果的可靠性。闭合水准环布设时选择的已有水准点为1个时,必须校核该控制点的稳定性。
似大地水准面净化模型现已在大部分城市建设完成,可以直接将网络实时动态定位或GNSS静态相对定位测量获取的大地高转变成正常高,一般其高程精度可以达到高程控制量测标准。测区内往往采集3个以上等级水准点大地高以保证成果的可靠度及其准确性,对比分析已知高程与净化后的高程,若较差超过5cm则代表似大地水准面精度可以达到测量净化水平。
(2) 高程转换。目前,常见的有武测模型、莫洛金斯基以及布尔沙三种空间直角坐标系转换模型,在转换形式上虽然有所差异,但转换精度相差不大,由于都有1个尺度参数、3个旋转参数、3个平移参数又统称为七参数转换模型[1-2]。
七参数求解时要求测量的重合点数不少于3个,一般地形测量项目的两对三维坐标包括地方平面坐标与高程、某地球框架下的大地高H以及大地经度L与纬度B。可以选用城市CORS定位技术或GNSS静态定位测量获取地方平面坐标,通过城市等级水准点联测几何水准测量获取地方高程。通过网络RTK或单基站RTK获取重合点的大地坐标,现阶段可选择的网络RTK较多,基于参考历元及特定椭球框架华测、千寻位置、城市CORS网等均建立了定位网络,重合点大地坐标利用单基站采集时基准站与流动站之间的距离宜控制在3 km以内。若个别重合点转换后的残差超限,应剔除该重合点补充新的重合点或重新采集其两对坐标,同时保证重合点能够覆盖整个测区且分布均匀。
3个旋转与3个平移参数是空间坐标转换的基础,考虑到不同尺度的差异性引入1个尺度变化参数k,两种基准下的空间坐标转换见式(1):
(1)
式中:εX、εY、εZ为3个旋转参数;ΔX0、ΔY0、ΔZ0为3个平移参数,两种坐标系之间的关系如图1。
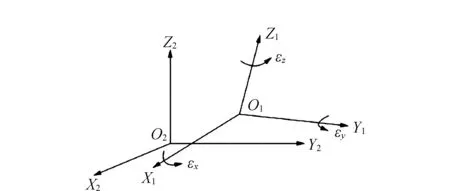
图1 七参数转换模型
3 实例应用
3.1 工程概况
某河道险工险段治理工程险工段总长1620 m。项目测量内容主要有修测河道河口线两侧各界定范围地形图和1∶500带状地形图,测量河道断面,每50 m沿河道规划中线测一个断面,水上和水下分别按地形特征点、1.0~2.0 m间距测量[3-9]。
完成内业数据处理及外业测量作业后对测绘成果立即实施质量检查,一般分为过程检查(由作业部门实施)和最终检查(由公司质检部实施)。过程检查和最终检查均可选用全数检查,对于涉及碎步点测量成果、控制测量成果等野外检查项时,按行业及国家标准确定检查比例实行抽样检查。
3.2 成果检验
可以采用相同的方法检核GNSS实时动态定位法测量的平面控制成果,通常在隔日或邻近收测时安排检核工作,成果坐标与检核坐标较差不宜超过30 mm。将坐标、角度及边长利用全站仪检核时,相应的误差应满足有关规范要求。陆域地形碎步测量采用的技术方法应与碎步点检核测量方法保持一致,相差不宜超过10%,三维坐标较差校核必须符合有关要求。一般利用纵横断面交叉点水深较差检核水下地形水深成果观测质量,主测深线应与测深检查线保持垂直,以超过主测深线的5%作为单波束检查线最低长度,纵横断面测点与有效检核点间距不得超过图上1 mm。完成检核后,对成果中误差M进行统计,采用式(2)完成同精度检测,即:
(2)
式中:Δi为检测较差;n为检测点数。
采用GNSS实时动态测量法采集项目控制点平面坐标,利用四等几何水准测量高程,其中乡镇防洪项目检核15点,检核比例30%,采集控制点50点,最大检核点位较差16 mm;农田防护项目检核20点,检核比例25%,采集控制点76点,最大检核点位较差为15 mm。采集完成控制点两套坐标后,分别求解乡镇防洪和农田防护两个区域的七参数,平面、高程转换残差均低于15 mm和10 mm,保证了转换成果精度。
该河道整治项目线路较长,工期要求紧且沿河两岸植被茂盛。综合考虑环境条件和项目特点对陆域地形选择3种测量模式:采用无人机倾斜摄影技术测量植被覆盖较少、地形开阔的区域,采用GNSS实时动态模式直接测定网络信号良好但有一定植被覆盖区域的地形地物点三维坐标,采用电磁波测距三角高程法+全站仪极坐标测定网络信号不良且植被覆盖明显区域的地形地物点三维坐标。考虑水域环境和地形特点拟对水域地形选择2种测量模式:采用回声探深仪联合作业无验潮模式+GNSS实时动态模式测量大深河道,采用探深杆+断面索人工作业模式测试窄浅河道。处理完成项目内业后校核地形高程成果,对比DLG线划图相应特征点与人工观测特征检核点,最大高程较差10.2 cm及其中误差±3.8 cm,能够达到1∶500地形图测绘精度要求。
4 结 论
(1)河道地形具有特殊性、复杂性特征,在水域与陆域地形测量时要考虑作业效率、成果精度等因素选择合适的方法,完成外业测量后还要多次重复观测足够数量的地形特征点,按照既有成果与检核成果较差完成测量中误差计算,通过各类技术手段科学评价作业质量。
(2)此外,无人机倾斜摄影测量技术具有成果表达内容丰富、作业效率等特点,比较适用于地形开阔区域的地形测量。在生成项目DLG线划图成果和1∶500大比例测绘图后,人工采集特征点三维坐标计算高程较差,统计测量中误差特别是高程中误差,这也是提高无人机测量测图的必然要求。
猜你喜欢
河北水利(2022年10期)2022-12-29
——以大班艺术领域为例
今天(2022年20期)2022-12-16
海洋通报(2022年1期)2022-04-29
今日健康(2021年5期)2021-12-01
全球定位系统(2021年3期)2021-08-07
装饰装修天地(2020年7期)2020-06-01
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
小学生作文选刊·中高年级版(2017年10期)2017-11-07
法制与社会(2017年29期)2017-11-03
