基于坐立转换的老人辅助站立装置的研究与设计
2022-09-08 08:12彭见辉李佳玉黎小巨谭雨晴高淇彬陈俊杰
机械工程师 2022年9期
彭见辉, 李佳玉, 黎小巨,谭雨晴,高淇彬,陈俊杰
(东莞理工学院城市学院,广东东莞 523419)
0 引言
据统计,21世纪初我国60岁以上老人高达2.5亿,占我国总人口的20%[1],随着我国新生儿出生率的逐步降低,人口老龄化趋势将进一步加剧。随着年纪增大、疾病侵袭,老人体力和行动能力变弱,易出现安全隐患,老人正常生活已成为我国必须面对和解决的社会问题。老人在家久坐或如厕时间过长后,起身会存在双腿发麻无力、难以站立的问题,此时极易产生危险。因此研究和设计辅助老人站立的装置显得尤为重要。
李杰[2]针对老年人无法自主起立问题,对康复机器人辅助起立的运动轨迹进行了研究;胡文刚等[3]对人体坐立转换时的力学问题进行了研究;F. Abbas[4]研究了被动重力平衡辅助站立装置;孙技伟等[5]结合平面连杆机构设计了基于变胞机构的老年自助椅;刘坤[6]以变杆长原理设计了辅助如厕的机械结构;雷中贵等[7]以Vicon对辅助站立中的舒适性、安全性进行了分析。
以上研究均未能将人体坐立转换运动规律与辅助老人功能椅的设计结合。本文从生物力学的角度出发,对人体坐立转换姿势进行分析,设计了一种老人辅助站立椅,经实验证实,可有效辅助老人站立。
1 坐立转换的生物力学分析
1.1 坐立转换动作分析
坐立转换动作是人体完成站立的关键,人体关节进行坐立转换动作时较复杂,难以进行研究,假设坐立转换时手臂置于躯干两侧,视为躯干一部分,因人体结构特殊的对称性,故可从生物力学角度,将人体坐立转换过程中单侧各关节简化为平面开式运动链模型,如图1所示。
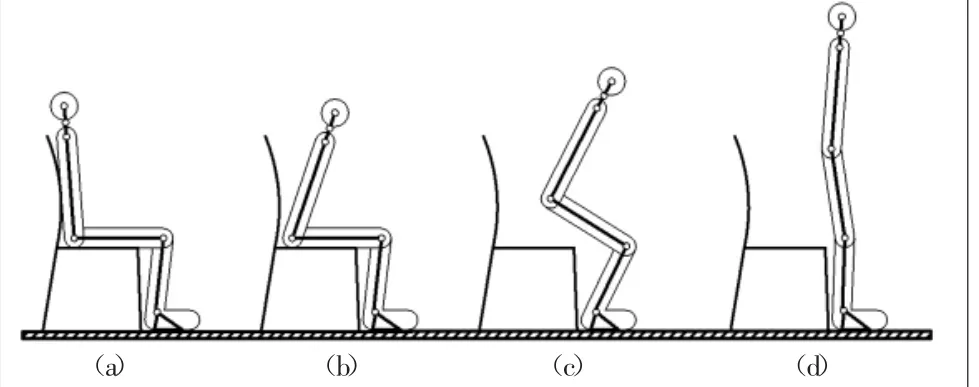
图1 人体坐立转换动作简化模型
研究表明,人体坐立转换动作分为3步:第1步为准备,如图1(a)~图1(b)所示,此时人体上身前倾,重心前移;第2步为起立,如图1(b)~图1(c)所示,上身绕髋关节转动,大腿绕膝关节转动,使臀部脱离座板;第3步完成站立动作,如图1(c)~图1(d)所示。
1.2 坐立转换的生物力学分析

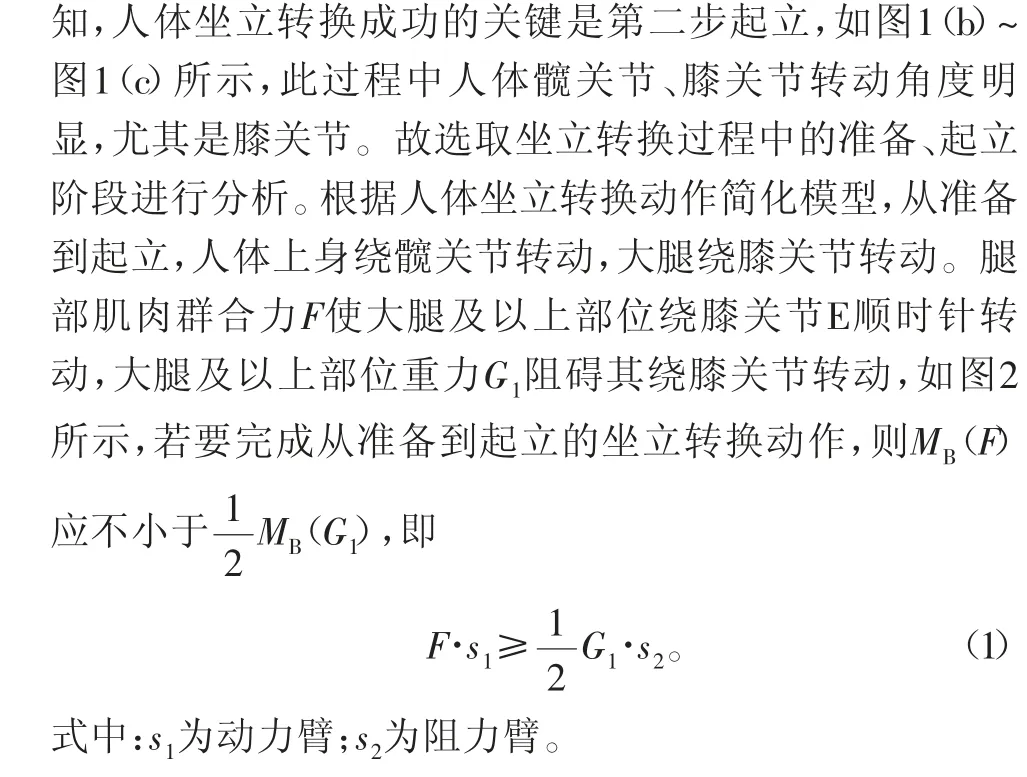
图2 起立阶段简化力学模型
以起立时踝关节中心为坐标原点,推导人体坐立转换过程中小腿、大腿、躯干、颈部、头部的重心坐标方程,具体如下:
小腿重心a的坐标方程:

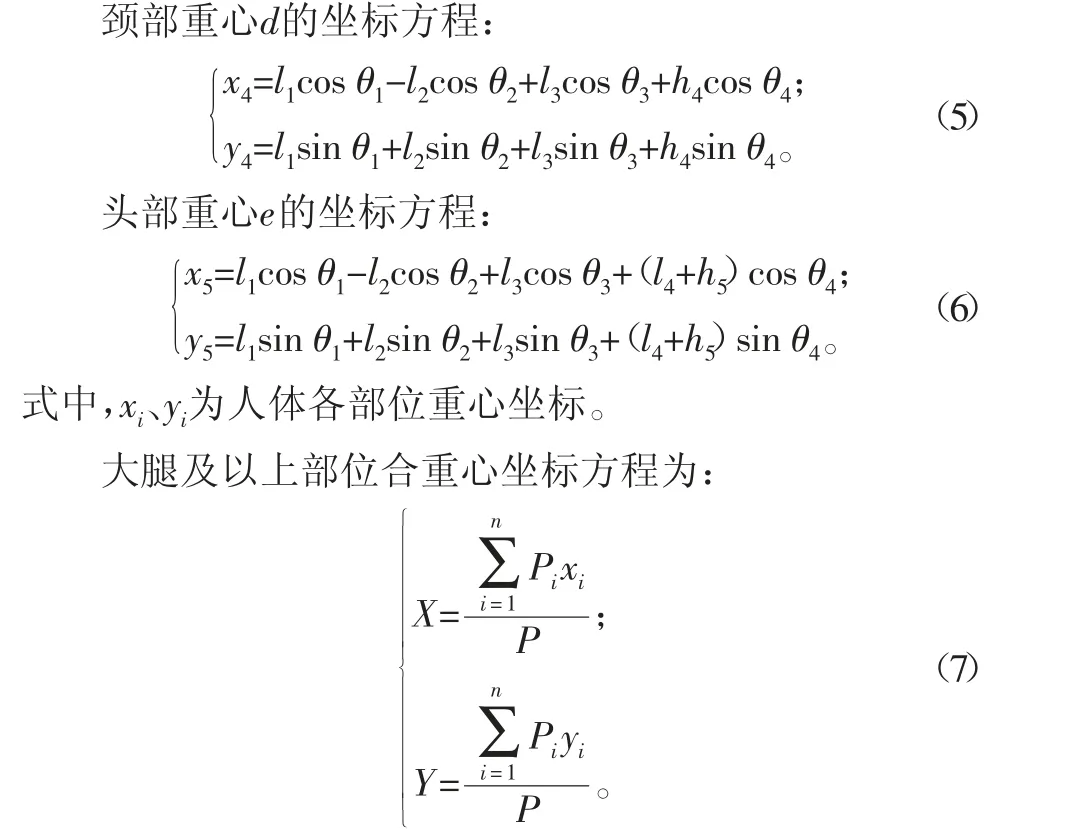
式中:X、Y为大腿及以上部位合重心横、纵坐标;xi、yi分别为小腿、大腿、躯干及以上部位重心坐标;pi/p为人体各部位的相对质量。
假设成年男性身高为H,质量为m,参照马广韬[9]等研究的人体各部位长度与身高数据,潘和泉[10]归纳的人体各部位相对质量及重心位置如表1所示。
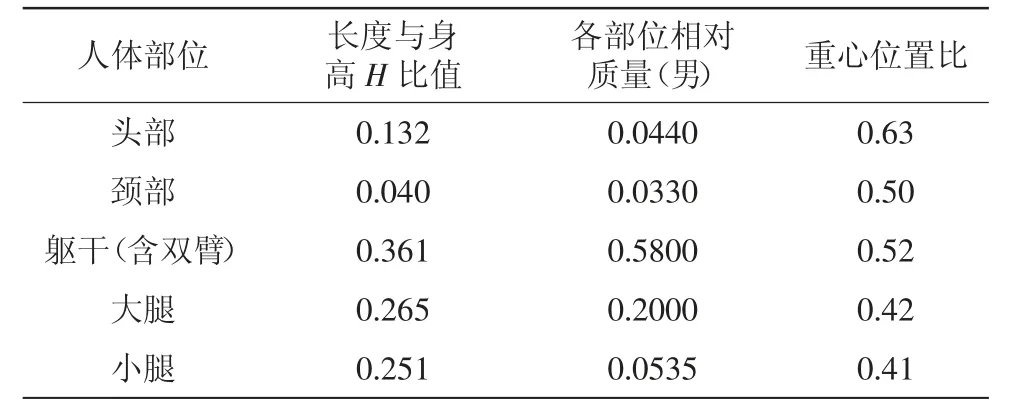
表1 人体各部位参数
因人体起立时主要是大腿及以上部位绕膝关节转动,故将式(3)~式(6)代入式(7)中,求出大腿及以上部位合重心横坐标方程式(8),并据s2=l1cos θ1-X求出阻力臂s2方程式(9):

1.3 生物力学模型分析
以一名H=175 cm、m=70 kg的男性为例,据表1知大腿及以上部位重力G1约占人体总重力的85.7%;根据Arnold等[11]基于MRI的人体肌肉骨骼模型分析得出,人体下肢肌肉群合力F对膝关节的动力臂s1≈5 cm;以Nuzik等[12]将人体起立阶段各关节与水平方向夹角θi代入式(10)进行计算,结果如图3所示。
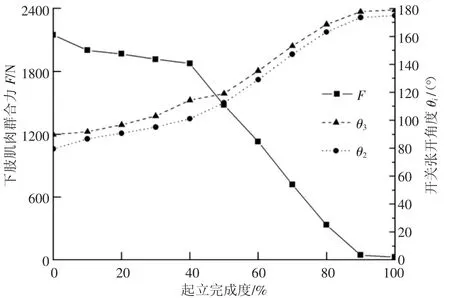
图3 下肢肌肉群合力、关节角度起立过程变化曲线
由图3可知,起立阶段初始时刻,所需要下肢肌肉群合力最大Fmax≈2146.9 N,此后随着膝关节角度θ2逐渐增大,F逐渐减小,在θ2增至约101°时,F迅速减小,说明起立初期需要的力较大,当膝关节θ2增至一定值后,阻力臂s2减小明显,起立较轻松。
结合式(10)对图3分析可知,膝关节θ2、髋关节θ3对起立初期Fmax影响较大。假设起立时双脚位置不变,则θ2由座板离地高度决定,若座椅过低,θ2减小,大腿及以上部位重心后移,阻力臂s2增大,由式(10)可知,F增大,起立困难;若座椅过高,虽能增大θ2,减小阻力臂,但人体双脚悬空,大腿因受上身重力挤压,易发麻无力。故椅子座板离地面的最佳高度=小腿长+足高。
起立初期身体前倾,躯干与水平方向夹角θ3减小,大腿及以上部位重心前移,阻力臂s2减小,由式(10)可知F减小,利于起立。由图3可知,θ2减小至约86°时,起立较容易,故起立初期应注意上身前倾。
2 下肢坐立转换装置的设计
2.1 辅助站立椅框架的设计
为使老人使用辅助站立椅移动方便,在椅子4条腿的下部安装带刹车的万向脚轮。市面上家用抽水马桶的长、宽、高分别为380、335、410 mm,根据椅子座板离地面的最佳高度=小腿长+足高,结合我国成年人主要尺寸[13],确定辅助站立椅框架的长、宽、高分别为415、445、460 mm。
2.2 托举机构的设计与分析
由1.3 节分析可知,人体起立初期困难,主要是因为膝关节角度过小、下肢肌肉群合力不足。设计托举机构实现对臀部及大腿的托举,辅助人体逐渐增大膝关节角度至101°,其结构如图4所示,座板通过转动副与框架铰接,电动推杆两端分别通过转动副与座板、椅子腿部铰接,随着电动推杆的伸出与回缩,座板可0°~80°转动,弥补下肢肌肉群合力不足的问题,达到辅助人体起立过程的作用。
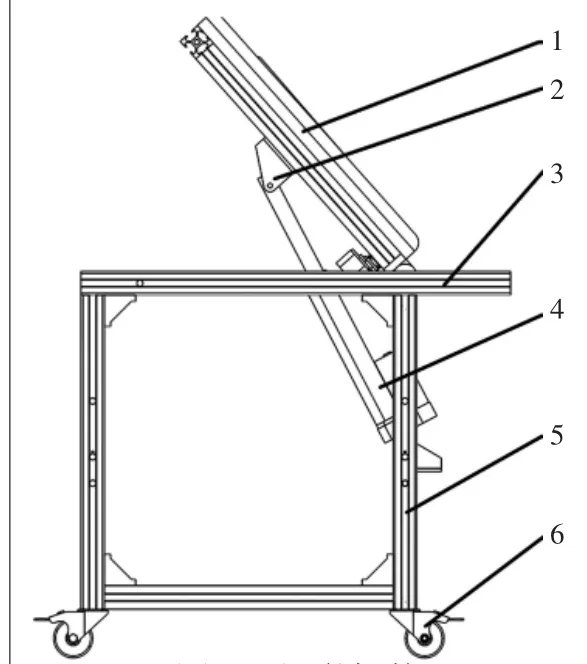
图4 托举机构
2.3 辅助站立机构的设计与分析
针对老人起立过程可能因双腿发麻等情况出现的站立不稳问题,设计辅助站立机构,对称安装于椅子左右两侧,该机构以椅子框架为机架,是由4个刚性构件用转动副组成的平行四边形机构,包括2个长杆、1个扶手、4个转动铰链。电动推杆通过转动副分别与长杆、框架铰接,在电动推杆驱动下,两长杆可实现25°~90°转动,其机构简图如图5所示。
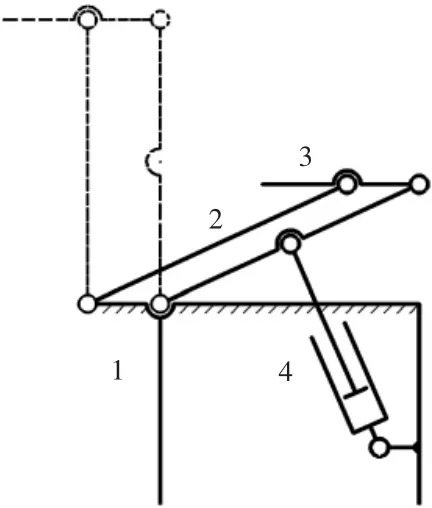
图5 辅助站立机构
电动推杆完全收缩时,两长杆与框架成25°角。电动推杆伸出时,两长杆开始转动,随着角度的增大,椅子扶手在保持水平的同时呈斜向上的助推运动,基本与人体起立时轨迹一致,确保老人起立过程中,双臂始终有支撑,起到辅助站立的作用,两长杆转动90°时,椅子扶手距离地面高度约为1 m,满足老人完全站立的需求。
2.4 便捷如厕机构的设计与分析
为解决老人坐在辅助站立椅上如厕的问题,设计了便捷如厕机构,以实现座板中部翻转板的打开与闭合,如图6所示。便捷如厕机构安装在座板的前下部,以手柄10驱动支撑杆9作为原动件,同时以支撑杆9作为输出,实现座板中部翻转板打开与闭合。便捷如厕机构共有6个构件,包括5个活动构件、6个转动副、1个移动副,自由度F=3n-(2Pl+Ph)=3×5-2×7=1,满足使用要求。

图6 便捷如厕机构
3 坐立转换的实验与分析
3.1 实验方案
为验证该辅助站立椅的使用效果,以一名身高为165 cm、体重为55 kg的女性为受试者,分别在辅助站立椅两个扶手、双脚位置、座板各放置1 个压力传感器,实验时要求受试者双腿自然分开与肩同宽,模拟久坐后起身,如图7所示。实验分两组进行:第一组不使用辅助站立功能进行站立,要求受试者双臂贴近躯干,自然站立;第二组使用辅助站立功能进行辅助站立,要求受试者双臂始终放在椅子扶手上。

图7 实验过程
两组实验过程如下:0~1 s为准备阶段,受试者按规定要求静止坐在设备上;1~5 s为起立阶段,此过程受试者缓慢起立;5~6 s为完全站立阶段。两组实验分别采集4个压力传感器的实验数据,每组实验连续进行5次,前2次为训练,后3次进行记录,每组间隔时间为5 min。
3.2 实验结果及分析
为分析方便,将左右扶手压力求和。经对比,每组实验3次记录的各传感器数据基本相同,选取其中一次数据进行分析,结果如图8~图10所示。
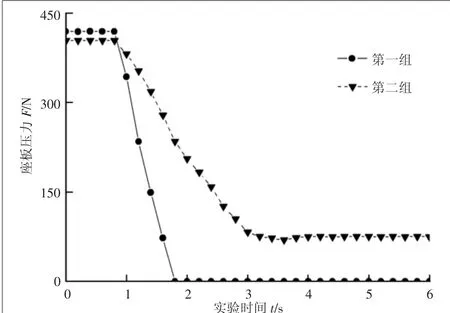
图8 座板压力

图9 双脚压力
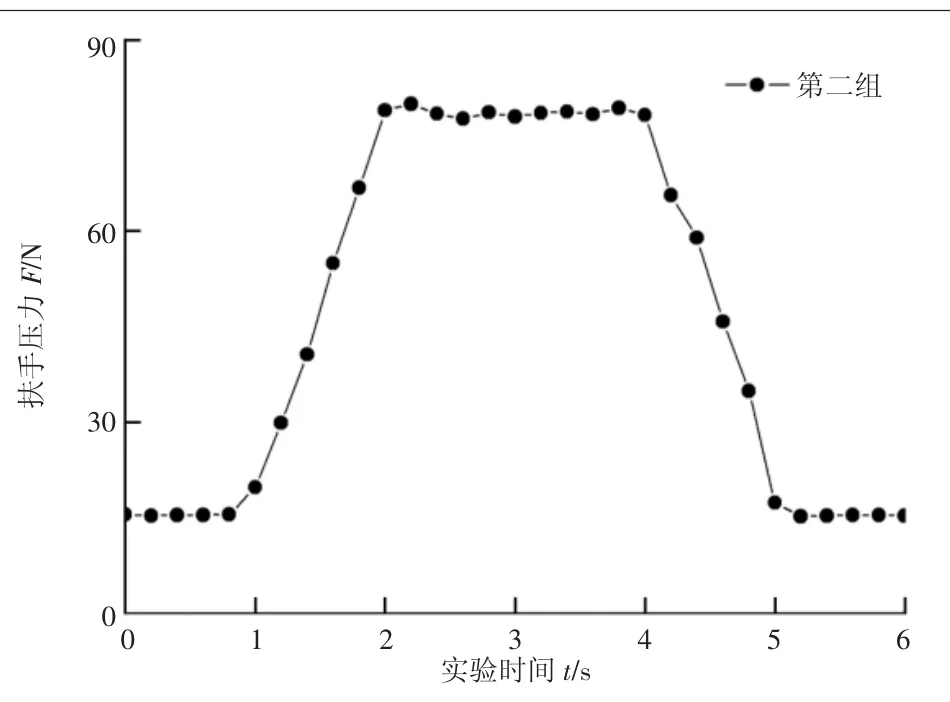
图10 左右扶手压力
第一组不使用辅助站立功能起立,0~1 s内座板、双脚位置压力和约等于受试者重力539 N,1~2 s内随着受试者起立,座板压力迅速降为0,双脚位置压力随之增大至539 N,其后一直保持不变,扶手处无压力。
第二组使用辅助站立功能起立,0~1 s内座板、双脚位置、扶手处压力之和约等于539 N。1~5 s内随着受试者起立,座板压力在1~3 s内缓慢下降至75 N左右,其后基本保持不变,说明座板在受试者整个起立阶段起到了明显的支撑作用,尤其是起立初期。双脚位置压力在1~3 s缓慢增大至407 N左右,其后保持不变,明显小于第一组实验的539 N。扶手处压力在0~1 s保持在15 N左右,1~2 s内迅速增大至79 N左右,其后2~4 s基本保持不变,随着受试者起立的完成,扶手处压力降至15 N左右,说明扶手在起立过程中有明显的辅助支撑作用。
4 结语
针对老人独自在家久坐及如厕后起身困难的问题,从生物力学角度对老人坐立转换行为进行分析,建立了老人坐立转换的生物力学模型,并根据老人起身行为特征,设计了一种基于生物力学的老人辅助站立椅,包括框架、辅助站立机构、托举机构、便捷如厕机构。以两对电动推杆为动力,分别驱动辅助站立机构进行伸展支撑双臂、托举机构进行托举臀部。经实验证实:该辅助站立椅可有效辅助老人站立,对提高老人生活自理能力及生活质量具有重要意义。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
反歧视评论(2022年0期)2022-10-21
机械管理开发(2022年5期)2022-07-07
甘肃教育(2020年6期)2020-09-11
中国临床医学影像杂志(2019年6期)2019-08-27
环球时报(2018-11-07)2018-11-07
中国核电(2017年1期)2017-05-17
红领巾·萌芽(2015年5期)2015-06-16
少年科学(2015年4期)2015-05-07
环球时报(2009-06-19)2009-06-19