
基于改进孤立森林算法的无人机异常行为检测
2022-09-07 01:57:22唐立郝鹏任沛阁张祖耀何翔张学军
航空学报 2022年8期
唐立,郝鹏,任沛阁,张祖耀,何翔,张学军
1. 西华大学 智能空地融合载具及管控教育部工程研究中心,成都 610039 2. 国家空域管理中心,北京 100094 3. 西华大学 汽车与交通学院,成都 610039 4. 西华大学 航空航天学院,成都 610039
无人机产业迅猛发展,其应用领域日益拓展,同时其种类和数量也迅速增加。由于研发成本及技术门槛相对较低,现有技术对无人机的发现识别能力有限,且监控法规制度及处置手段滞后,民用无人机“黑飞”现象日益增加,对公共安全、飞行安全及空防安全构成严重威胁。因此,如何快速高效地检测无人机的异常行为,对合作型无人机运行状态进行准确监控,对“黑飞”的非合作型无人机进行精准反制,成为无人机规范化管理的关键性问题。
从研究对象上看,目前,关于低空轻小型无人机异常行为检测的研究相对较少。Xiao等基于大型无人机运行数据,提出了一种基于循环神经网络(Recurrent Neural Network, RNN)的大型无人机异常行为检测方法,能够较准确地区分轻微偏移和异常行为的差异,提高检测准确率。除了上述个别研究,大多数针对异常行为的研究仍主要集中在大型有人机、车辆以及行人等对象上。吴奇和储银雪采用深度学习的方法建立基于数据驱动的航空器飞行状态识别模型。张余和葛飞在针对航空器飞行状态识别时,考虑了其飞行状态点。潘新龙等考虑了目标位置、速度特征,提出了一种基于多维航迹特征的异常行为检测方法。Medel和Savakis提出一种基于卷积神经网络(Convolutional Neural Network, CNN)和变分自编码器(Variational Auto-Encoder, VAE)的混合框架CNN-VAE,对视频中的车辆轨迹进行表示、分类和异常检测。祝彦森针对传统孤立森林(iForest)算法中存在的分支过多和得分不一致的情况,提出了一种将孤立森林算法与K-means聚类相结合的改进算法,经检验有效提高了针对行人异常行为的检测效率。
从异常行为的检测方法上看,较流行的算法包括神经网络(Neural Network)、K-means、支持向量机(Support Vector Machine, SVM)以及孤立森林算法等。其中,孤立森林法对高维数据具有较好的鲁棒性,并且在异常检测中具有精度高、速度快的特点,但是其收敛速度和精确度会受切割点的影响;神经网络因其特殊的结构,在异常检测方面具有良好的表现,卷积神经网络算法对图像有较强的识别能力,但是其准确度受卷积核特征的影响,而长短时神经网络在处理序列模型时具有较好的表现,能够在一定程度上解决梯度爆炸等问题,但由于其结构特点,导致运算效率有较大损失;此外,基于模型融合的集成学习方法在异常检测领域也有应用,该方法基于交叉验证思想,利用决策树等分类器构造新的特征进行训练,进而提升了模型的鲁棒性。现有方法较少考虑研究对象的实际运行特点,对异常行为的判定结果通常只给出了“异常”或“正常”的结论,缺乏对异常类型较细致的划分。
通过上述分析可见,现有方法对无人机异常行为的研究相对缺乏,较少考虑无人机外观特征和实际运行场景,难以准确对非合作型无人机的异常类别进行判断。为解决上述问题,本文参考行人和车辆识别领域的研究思想,重点针对无人机在城市高密度建筑群中飞行的场景,首先提出了一种基于索贝尔算子-卷积神经网络融合算法(Sobel Operator-CNN),实现对非合作型无人机外观特征参数的提取和分析,确定无人机的类型。进一步地,综合考虑传统孤立森林算法在异常行为检测中的优缺点,提出基于动态最大生长高度的改进孤立森林算法,提高无人机异常行为检测的收敛速度和准确率。最后,通过仿真数据,验证了该方法的有效性和先进性。
1 异常行为特征分析及参数提取
从无人机运行管理的角度,可将无人机分为合作型无人机和非合作型无人机。合作型无人机一般搭载机载管控模块,在运行过程中,可实时向管理部门发送运行状态。因此,此类无人机的异常行为主要体现在运行姿态、航迹等方面。针对非合作型无人机,其主要具有飞行任务、运行轨迹不明确等特点,一般存在较多监控盲区,监管难度较大。因此,非合作型无人机的异常行为主要体现在运行姿态、航迹侵占、禁飞区侵入以及非法执行高危任务等方面。
通过上述分析可见,无人机运行特征提取的准确性将是影响无人机异常行为检测准确度的关键因素。因此,本节将结合几何学、计算机视觉以及运动学等领域知识,分析无人机的各种运行特征,并提出针对多特征的参数提取方法。
1.1 合作型无人机特征分析和参数提取
1.1.1 运行航迹
设某城市运行空域,合作型无人机某次飞行计划中有次信息反馈,则对应航路点记为
(,,),∈{1, 2,…,}
式中:、、分别为时刻时,无人机计划处于的经度、纬度和高度。设无人机的实际飞行轨迹为(,,),∈{1, 2, …,},其中、、分别为在时刻,无人机实际的经度、纬度和高度,如图1所示。无人机在时刻的实际位置与报备位置的偏差(欧式距离)。
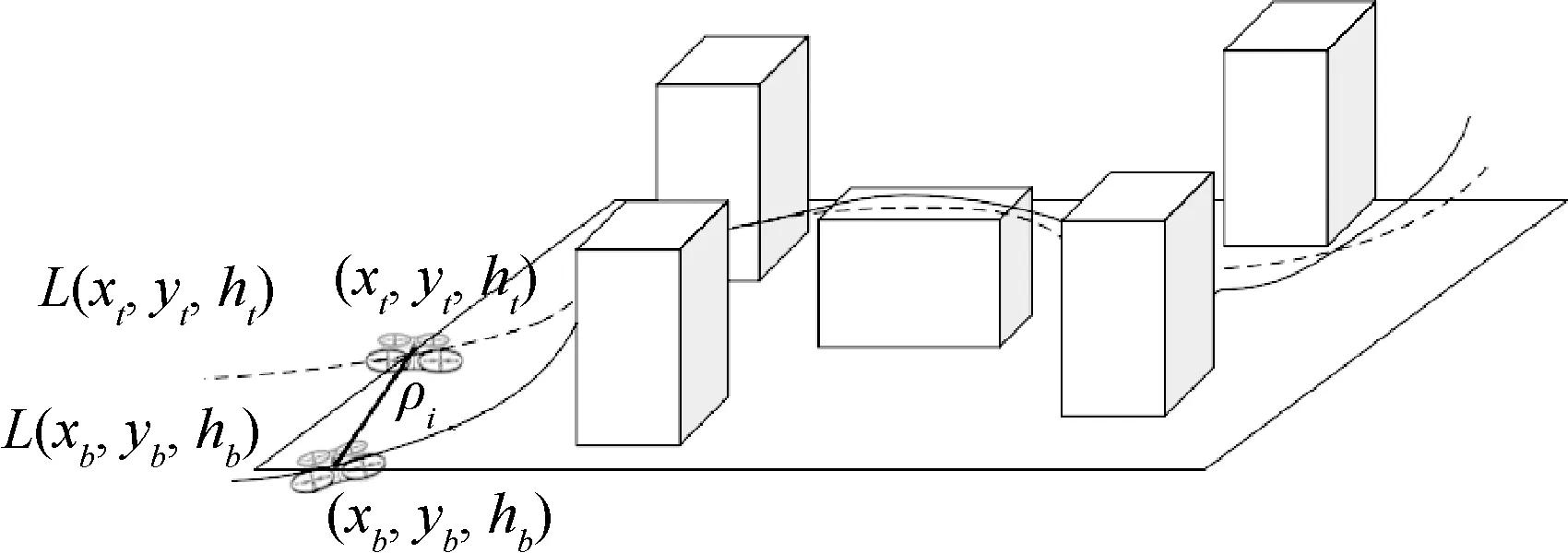
图1 t时刻无人机报备位置偏差Fig.1 Reported position deviation of UAV at time t
这里,将航迹稳定性作为判别合作型无人机航迹是否异常的关键参数。通过偏差值,可求得无人机时刻的偏差均值(),同时记录偏差次数(即≠0的次数),即

(1)
偏差次数、偏差值以及偏差均值()为合作型无人机的航迹运行异常判别的关键参数。相比于传统的状态特征分析,本文对偏差均值()的设计,可对符合最大航迹偏差范围内的飞行器进行实时监测,对航迹频繁轻微波动的异常无人机进行检测,弥补了传统检测方法中针对此类异常特征检测方法的不足。同时,将轨迹坐标转换为、、()这3个关联性较强的数据作为改进孤立森林算法的输入数据,可提高异常行为检测的准确率。
1.1.2 运行状态
本文研究的无人机主要处于高密度的障碍物的城市低空环境,无人机的各项运行参数(即速度、爬升率、俯仰角、航向等)不稳定,将对其运行安全造成影响。因此,需要通过结合无人机实时反馈的运行参数与障碍物位置进行综合评估,并将评估值作为状态异常的判定参数。
无人机运行主要在爬升、下降和转向等3个阶段存在较大的安全隐患,本文将重点对无人机上述3个阶段的运行参数进行提取分析。
1) 爬升、下降过程
在无人机爬升过程中,影响无人机运行的关键参数为爬升率和与障碍物的距离。设无人机在、这2点间的爬升阶段如图2所示,此时的参考仰角为线段与其在平面上投影的夹角。
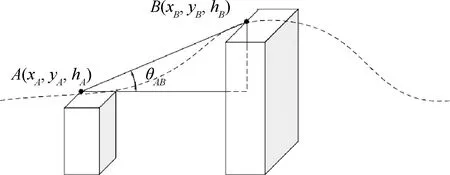
图2 爬升阶段示意图Fig.2 Schematic diagram of climbing stage
在爬升段,时刻无人机的实际爬升角度为无人机相邻时刻所在位置连线与其在平面上投影的夹角。
则可得无人机时刻的爬升角度均值为

(2)
通过余弦值对爬升过程中实际角度和参考角度吻合度进行分析,可得爬升差异系数为
=|cos(())-cos|
(3)
爬升过程中无人机实时爬升角度与参考角度的差异系数可作为爬升过程中的关键参数,下降过程此方法仍然适用。相比于传统的状态特征分析,本文对爬升差异系数的设计,一方面可有效地对无人机爬升过程相邻时间点角度变化异常进行检测,另一方面将水平距离与爬升高度进行融合判断,可有效降低无人机爬升过程中前期爬升率小(大),后期爬升率大(小)的异常状态。同时,将爬升差异系数,作为第2节改进孤立森林算法输入数据,降低了数据维度,使算法收敛性速度更快,准确率更高。
2) 转弯过程
设无人机转弯阶段为(,,)、(,,),报备航迹在此阶段的转弯半径为,如图3所示。
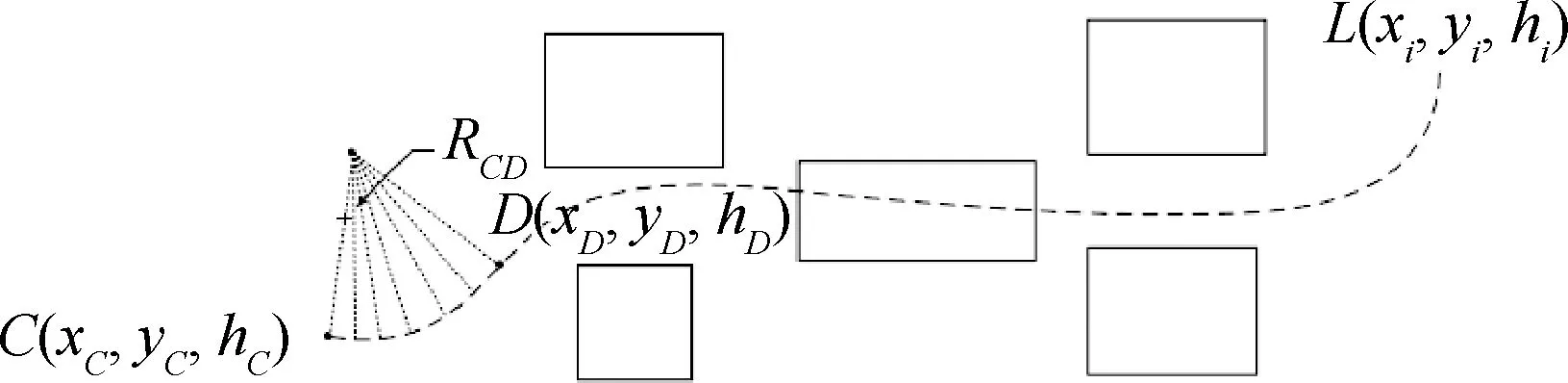
图3 转弯半径示意图Fig.3 Schematic diagram of turning radius
无人机进入转弯阶时,提取无人机、+1、+2 连续时刻位置数据,可得无人机实时的转弯半径。
设、+1、+2坐标分别为(,,)、(+1、+1,+1)、(+2,+2,+2),无人机转弯形成的弧线为圆方程:++++=0的一部分,其中:
无人机转弯的实时半径为
(4)
无人机的最小转弯半径为,在≥的前提下,提取此段转弯半径偏差Δ为
Δ=|-|∈[1,-2]
(5)
此阶段的转弯波动均值(Δ)为
(6)
无人机实时转弯半径以及转弯的波动(Δ),并实时地与最小转弯半径进行对比分析,可作为转弯过程的关键性参数。相比于传统的状态特征分析,转弯波动均值(Δ)的设计,可有效对无人机转弯半径波动情况进行检测,并根据波动大小对无人机转弯状态的异常行为进行判断。同时,将转弯过程的坐标数据处理为(Δ)、数据,作为第2节的改进孤立森林算法输入数据。
1.2 非合作型无人机特征参数分析
对于非合作型无人机,一般无法准确地获得其各项参数。目前,对非合作型无人机的数据获取一般使用光电设备和低空探测雷达。获取的信息通常有实时轨迹数据、外观等。因此,本文重点从非合作型无人机的实时轨迹、无人机类型与运行环境等特征结合进行提取。
1.2.1 航迹特征
非合作型无人机的航迹异常主要体现在航迹侵占、禁飞区侵入、飞行航迹冲突3个方面,如图4 所示。其中,航迹侵占指非合作型无人机占用合作型无人机的报备航迹;禁飞区侵入指无人机有侵入禁飞区的趋势;航迹冲突指非合作型无人机与周围其他飞行器发生碰撞的概率较大。
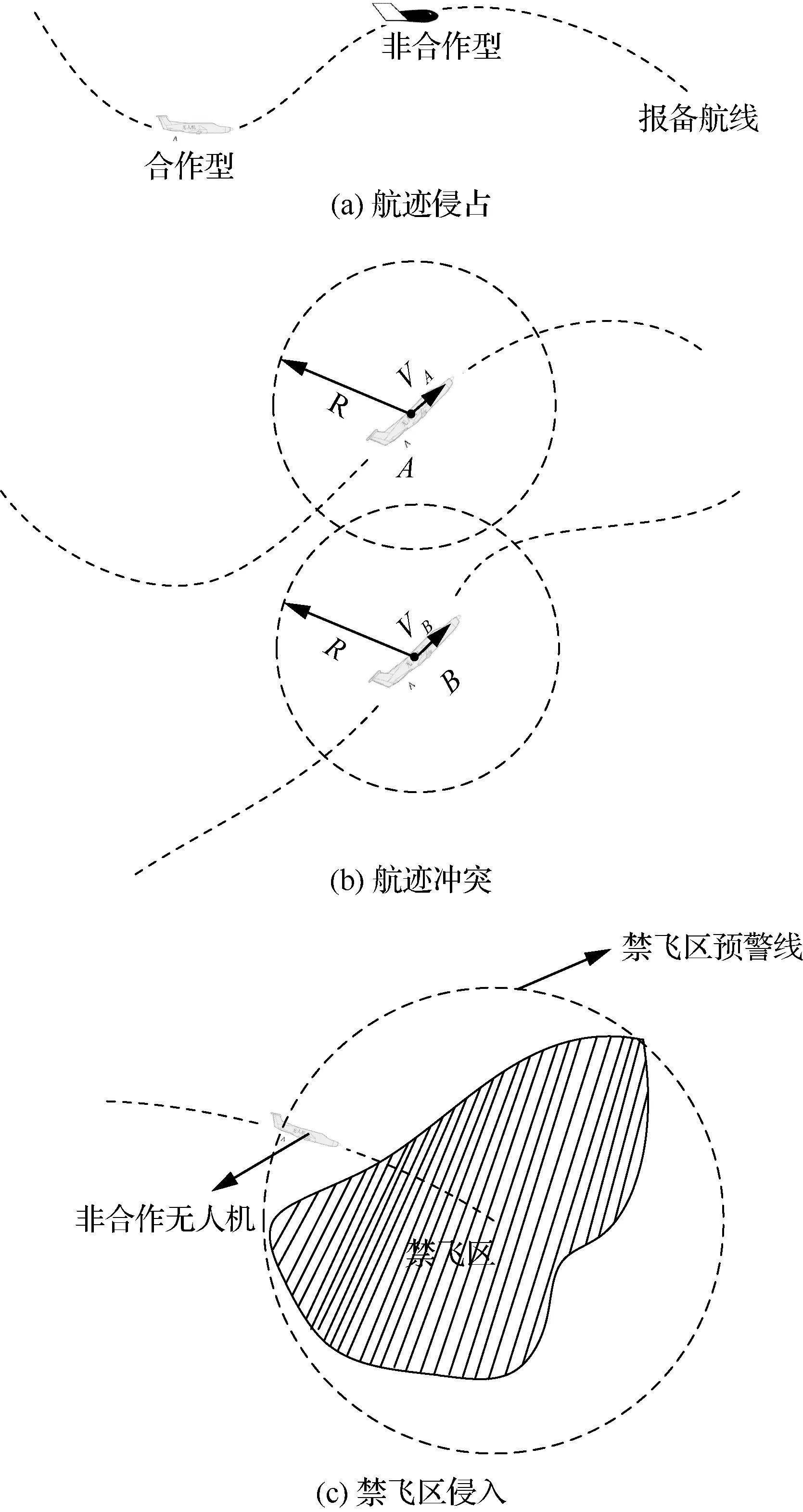
图4 非合作型无人机航迹异常类型Fig.4 Types of track anomaly of non-cooperative UAV
1) 航迹侵占
非合作型无人机的航迹侵占参数,可通过非合作型无人机与报备航线之间的偏差和偏差均值()来判定非合作型无人机航迹与报备航迹的吻合程度。具体方法可参考1.1.1节中提到的合作型无人机运行航迹稳定性提取方法,此处不再详细赘述。
2) 禁飞区侵入
目前禁飞区一般是指某一指定区域以上的空域。因此,在对非合作型无人机禁飞区的研究中,运行高度将不作为影响因素,可将三维环境的运行轨迹转化为二维环境运行轨迹进行分析。设相邻2个观测时间点非合作型无人机先后通过(,)、(,),禁飞区圆心坐标为(,),半径为。无人机相邻观测点所在位置距离为,上一时刻观测点位置与圆心坐标的连线为,设∠=,设无人机与圆心坐标连线与切线夹角为∠=,如图5所示。

图5 禁飞区侵入异常Fig.5 Intrusion anomaly in no-fly zone
=arctan{[(-)(-)+


(7)
=arccos{[(-)+(-)+
(-)+(-)-(-)+


(8)
理想情况下,若≥,则无人机此时运动方向为禁飞区方向,否则为远离禁飞区。由于数据获取存在一定的误差,因此需设定阈值判定禁飞区角度差,即
=-
(9)
值作为判断非合作型无人机是否具有禁飞区侵入异常的参数。区别于传统的数据和特征分析方法,将作为禁飞区侵入异常的判定,可以提高无人机禁飞区侵入趋势异常的判定准确度,同时可有效对具有禁飞区入侵趋势的无人机进行预警。此外,将多维数据转化为一维数据,可进一步提高改进森林算法的准确率和收敛速度,提高预警的时效性。
3) 航迹冲突
非合作型无人机的运行轨迹具有多样性的特点,因此存在较大概率与周围飞行器相撞。记录2个相邻时刻,相邻2架无人机的坐标如下:时刻,设1号无人机位置为(,1,,1,,1),2号无人机位置为(,2,,2,,2);+1时刻,1号无人机位置为(+1,1,+1,1,+1,1),2号无人机位置为(+1,2,+1,2,+1,2),如图6所示。
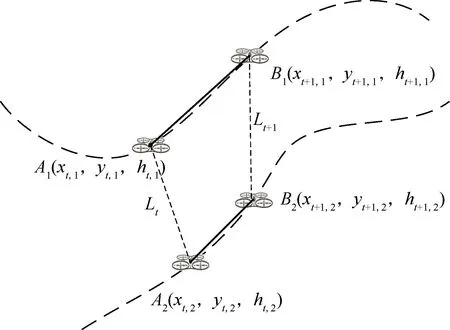
图6 航迹冲突Fig.6 Track conflict
、+1时刻2架无人机之间的间隔(欧氏距离)、+1,则相邻2架无人机的距离变化量为
Δ=+1-
(10)
若相邻2架无人机在安全距离之外存在连续的Δ<0,则可判断为2架无人机存在冲突的概率较大。此项参数将作为后续判定无人机航迹冲突的关键性指标。
1.2.2 飞行目的特征
1) 无人机类型判别
无人机类型是作为判断非合作型无人机异常行为的先决条件。目前将常用的非合作型无人机主要分为物流、航拍和其他3类。本节将重点对上述3种无人机的类别进行判断,并基于在图像识别技术中比较成熟的卷积神经网络算法对其进行区分。由于卷积神经网络技术并非本次研究的重点,因此本文不再详述其基本原理。物流无人机一般具备关键装备货架,在识别时,可将货架作为物流无人机的关键特征;航拍无人机关键特征为摄像头。而将除这2种类型之外的无人机划分为其他类别。
分类步骤:
基于索贝尔算子(Sobel Operator),对无人机进行边缘检测,并获得无人机外观轮廓。设定水平和竖直方向的卷积因子分别为、,即
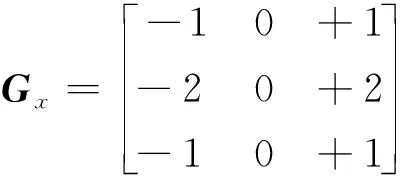
(11)

(12)
通过步骤1可得物流无人机(图7)与航拍无人机(图8)的外观轮廓,同时可获得二值化图像矩阵。

图7 物流无人机外观Fig.7 Appearance of logistics UAV
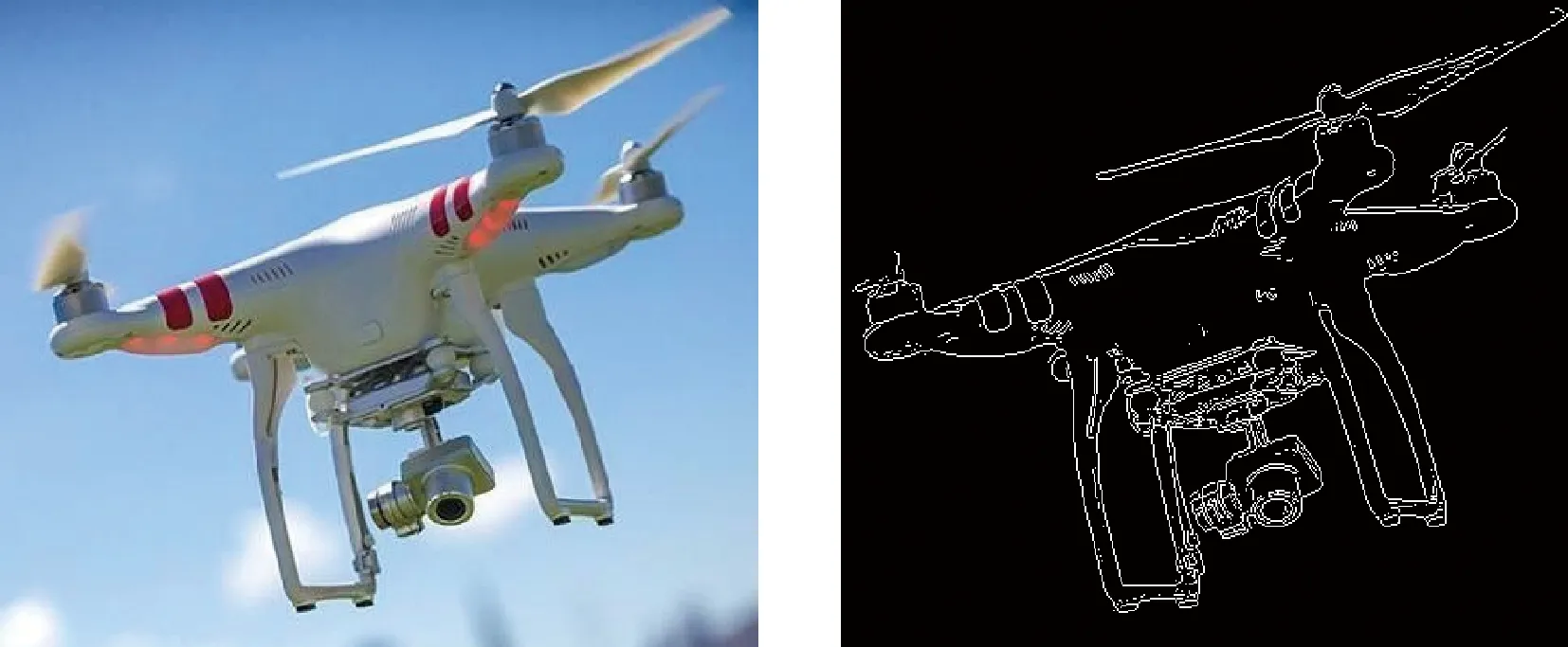
图8 航拍无人机外观Fig.8 Appearance of aerial UAV
将二值化图像作为卷积神经网络的输入样本进行训练,设定卷积神经网络的卷积层为3层,采用ReLU激活函数,选用最大值池化原则(Max-Pooling)进行池化,卷积核个数为20个。
通过卷积神经网络对无人机进行分类,并结合环境和无人机类型设定各类无人机的威胁系数,且该数据能够根据实际情况调整,如表1所示。
2) 参数特征分析
航拍无人机在执行拍摄任务时,一般处于悬停或者巡航状态。因此,本文将分析无人机运行环境及无人机的悬停状态,进而对无人机拍摄特征参数进行提取。
根据环境的密级程度设定某区域的密级系数为(∈[0,1],为区域代号)。通过无人机相邻监测时段的位置移动参数,对无人机的悬停进行判断。设无人机相邻监测时段为(,,)、(+1,+1,+1),可得2个时刻的欧式距离,根据式(1)可得无人机的波动均值即位置移动参数,该无人机飞行目的异常参考系数,即

(13)
此阶段,根据无人机在涉密区域停留的时间及涉密区域系数,可将作为无人机飞行目的异常的关键参数。相比于传统方式,提出不同运行环境下的无人机威胁系数,并融合Sobel Operator-CNN算法对无人机类型进行判定,设计了无人机飞行目的异常参考系数,实现了融合无人机外观特征和运行数据特征的状态特征分析方法,弥补了传统特征分析方法中缺乏对无人机外观状态特征分析的不足。
表1 无人机威胁系数
Table 1 UAV threat coefficient
2 异常特征判断方法
当前研究中,孤立森林算法在异常数据检测中具有准确率高、判别速度快的特点,因此本文将其用来识别异常无人机类型。
孤立森林是由若干个二叉树组合而成,算法具体流程如下:
选取总数据中个数据作为训练数,样本数据最大值为,最小值为,放入一颗二叉树的根节点。
随机选择数据样本中的一个维度和切割点(∈(,)),切割点将此维度下小于的点放左节点,大于等于的点放右节点。
在下一节点以递归的形式重复步骤1~步骤2,直到每个节点只有一个数据存在或者达到树的最大生长高度。
选择下一个二叉树重复步骤1~步骤3,直到所有二叉树训练完成。
计算每棵孤立树的路径平均长度(), 即

(14)
式中:()为调和数,该值可以被估计为()+(其中欧拉常数≈058)和路径长度()的期望(()),最后由(())求得样本的异常分数(,),即
(15)
当(,)≈1时,该点一定为异常点;当(,)≈0.5 时,该点样本中几乎不是异常点;当(,)≪0.5时,该点一定不为异常点。
孤立森林中每颗孤立树的异常点区分能力存在一定差异,结果导致算法的收敛性和识别速度具有较大差异。因此,根据研究重点,本文提出了一种基于动态最大生长高度的改进孤立森林算法。本文改进算法的关键步骤为对每个二叉树单个节点的区分性进行判断,具体算法步骤如下:
传统算法步骤2中,由于随机选择的切分点和维度,记放入左侧集合的数据数量,右侧集合的数据数量为。
对节点的区分有效性进行判断。基于孤立森林的基本原理,若二叉树节点能较大程度地将异常点和正常点区分,则此二叉树的节点区分度高,可以判断为优良节点二叉树,并继续往下生长,否则此二叉树节点为拙劣节点,二叉树停止生长,选择下一棵二叉树进行训练。有效性参数的判别公式为

(16)
若∈[0.80, 1.28],则切割点左右两侧的集合元素数量几乎相等,可判断此生长节点为拙劣节点,则此二叉树停止生长。
重复步骤1和步骤2,直到所有二叉树训练完成,结合式(14)和式(15)对异常点进行判断。
根据异常数据所处的位置,判断无人机所属的异常行为。
此改进孤立森林算法由不同高度的二叉树组成,可大幅降低计算量,同时提高对异常数据判断的准确性。
3 仿真结果及分析
本次仿真数据,基于airsim-ardupilot仿真平台,以X-box遥感设备作为无人机操纵设备,对成都市二环内低空环境进行数据仿真。并基于mission planner对数据样本进行采集(如图9所示),采集训练数据为10 000条,其中由于摇杆设备操作失误导致的无人机侵入禁飞区、与障碍物相撞、混合运行干扰等异常数据为1 766条,如表2 所示。合作型无人机的特征为航迹偏差次数、航迹偏差均值()、爬升角度差异系数和转弯半径的波动(Δ);而非合作型无人机的特征为禁飞区侵入判定系数、无人机冲突距离变化量Δ和飞行目的参考系数。
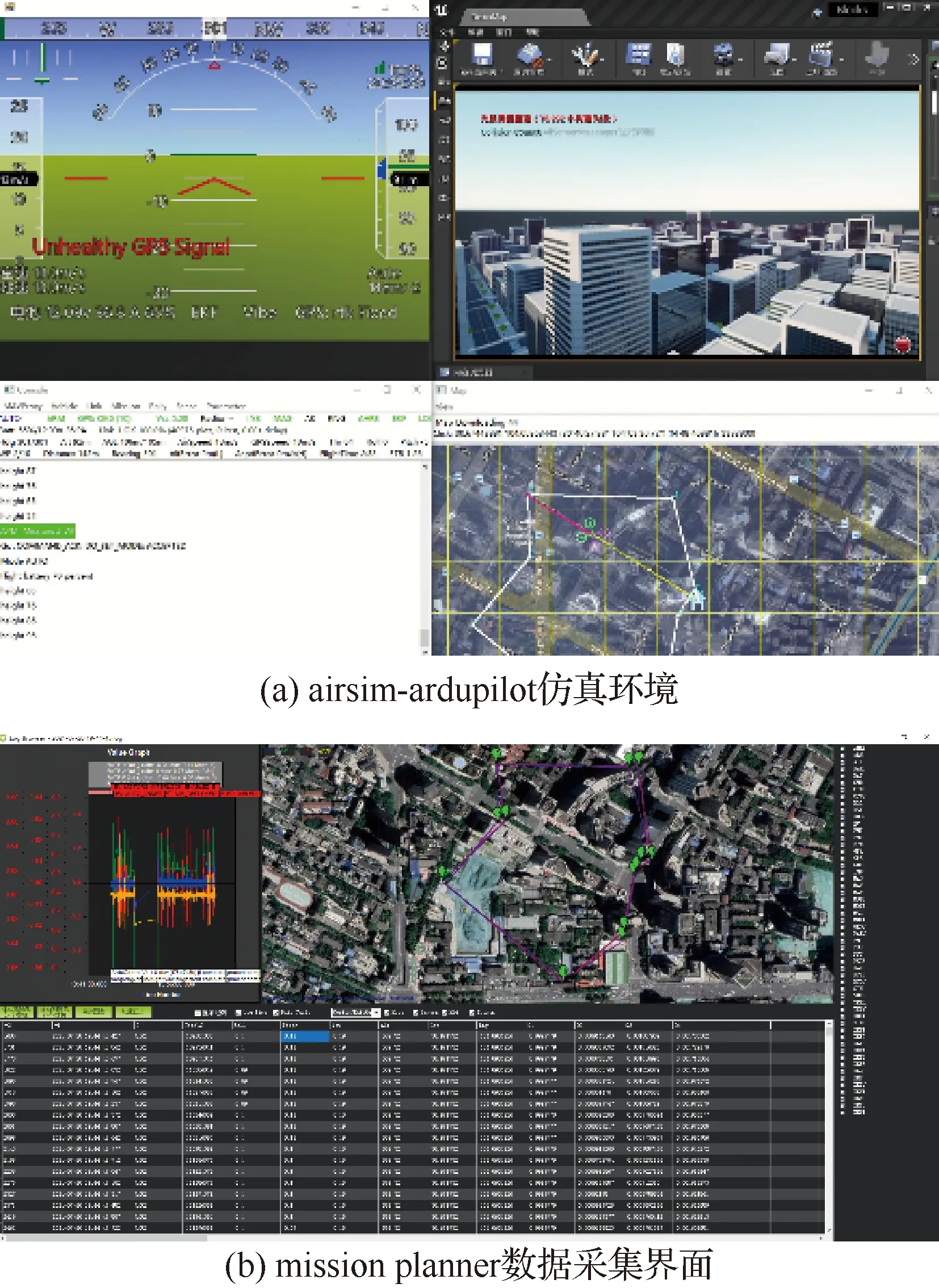
图9 数据仿真采集平台Fig.9 Data simulation acquisition platform

表2 数据信息Table 2 Data information
设定随机采取的样本数量=256、树的高度=8和有效二叉树的数量=100(有效二叉树:预先不设立二叉树数量,累计可生长二叉树数量达到100后停止)。通过受试者工作特征(Receiver Operating Characteristic, ROC)曲线下方的面积大小(Area Under Curve, AUC)对预测精度进行评价,其中AUC∈[0, 1],AUC值越靠近1,说明精度越高。基于同一组数据将传统的孤立森林算法和改进的孤立森林算法的精度评价、收敛速度进行比较,如图10(a)所示。可得仿真结果数据如表3所示。
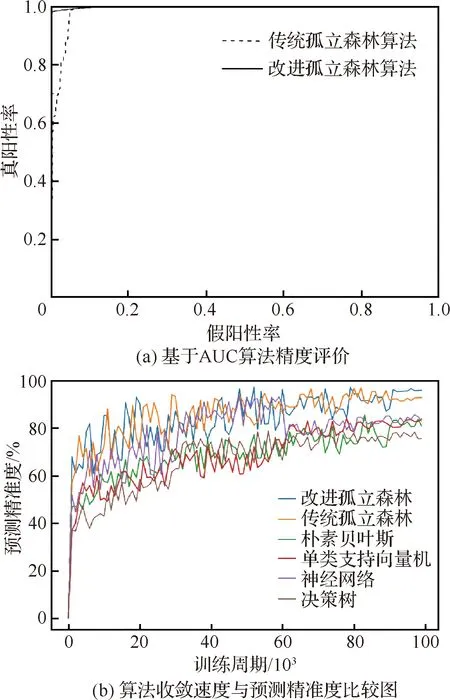
图10 改进算法与传统算法比较Fig.10 Comparison between improved and traditional algorithms
根据表3可得,改进孤立森林算法相比于传统的孤立森林算法,AUC值更接近于1,因此算法精度较高;同时运行时间快了5.179 s,样本的预测精准度高了3.2%,因此改进算法具有明显的优越性。

表3 仿真结果Table 3 Experimental results
为了进一步说明算法的先进性,基于同一数据集,选用了单类支持向量机、朴素贝叶斯、神经网络以及决策树算法进行比较。经测试,得出孤立森林算法预测精准度为96.4%,神经网络算法预测精准度为83.2%,朴素贝叶斯算法预测精准度为80.6%,单类支持向量机算法的预测精准度为81.8%,决策树算法预测精准度为78.1%,如图10(b)所示。
无人机异常类型判别结果如表4所示,实际检测系统如图11所示。
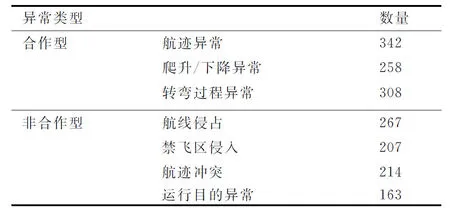
表4 异常行为判别结果Table 4 Discrimination results of abnormal behaviors

图11 异常行为检测系统Fig.11 Abnormal behavior detection system
4 结论与展望
本文针对无人机异常行为检测中的关键问题,主要提出了基于Sobel Operator-CNN算法的无人机类别判定方法和基于动态最大生长高度的改进孤立森林算法,以提升对合作型无人机和非合作型无人机异常行为检测的准确率和效率。在无人机飞行状态特征分析方面,对于合作型无人机,针对航迹、爬升/下降和转弯等状态特征,提出了偏差均值、差异系数等关键参数;对于非合作型无人机,针对禁飞区侵入和飞行目的等特征,提出了基于Sobel Operator-CNN算法的无人机类型判定方法,实现了无人机运行场景和外观特征的融合,形成了非合作型无人机异常参考系数。进而,提出了基于动态最大生长高度的改进孤立森林算法,对无人机异常行为进行检测。仿真结果表明,本文所提出的方法可有效提高无人机异常行为检测的准确性和效率。解决了无人机异常行为检测中外观特征数据与运行环境融合的关键性问题,进一步降低了无人机异常行为检测难度。下一步,拟将本方法与无人机感知和避撞系统相结合,实现中大型无人机“外观特征+运行数据”的异常行为检测,进一步推动无人机全面融入国家空域系统。
猜你喜欢
电脑报(2022年37期)2022-09-28 05:31:07
现代计算机(2021年14期)2021-07-09 17:19:40
青年歌声(2019年12期)2019-12-17 06:32:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
航空模型(2017年7期)2017-08-15 10:24:44
武汉轻工大学学报(2016年4期)2017-01-16 08:53:03
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47
河南科技(2014年24期)2014-02-27 14:20:01
自然与科技(2013年6期)2013-04-29 00:44:03
