
基于PIC16F877的车队涉水转弯稳定性预警系统*
2022-09-02 10:53:06谢小叶张慧楠肖广兵
微处理机 2022年4期
谢小叶,张慧楠,肖广兵
(南京林业大学汽车与交通工程学院,南京 210037)
1 引言
由于城市生态系统脆弱化及暴雨天气高频性,城市的低洼地段易产生内涝、洪水等次生灾害[1],路面与轮胎接触面会产生一层水膜,两者间的摩擦因数降低[2],导致车队在转弯时稳定性变差,影响车队正常运行。尝试解决此类问题的研究当前有很多,贾宇涵[3]等人设计了一种在车身安装液位传感器以探测水位的系统,有效降低汽车涉水时产生的风险。但是该系统只能在车辆到达积水路段时启用,无法在转弯路段对车队预警,存在安全隐患。沈谞雅[4]通过采用多传感器对道路坡度角、积水到达排气管的高度进行测量与计算,预测车辆能否继续前行。但此装置计算复杂且测量不易准确,不适用于车队日常出行。针对现有研究的不足,在此设计一种车队涉水转弯稳定性预警系统,通过在城市内涝多发路段安装液位传感器与摄像头,结合5G通信技术,将水位数据与实时监控图像传输至上位机,实现信息交互,及时规划适宜的行进路线,提高转弯稳定性。
2 系统工作原理
系统以PIC16F877处理器为核心,通过液位传感器、摄像头、GPS芯片等硬件设备采集城市内涝多发路段的水位信息以及当前车队行驶状况信息。PIC单片机对接收到的信息分析处理后,发送数据至上位机,有利于车队管理人员监测暴雨天气下的实时水位信息并为车队合理规划行驶路线,完成对车队在转向工况下的涉水预警。系统整体设计原理如图1所示。
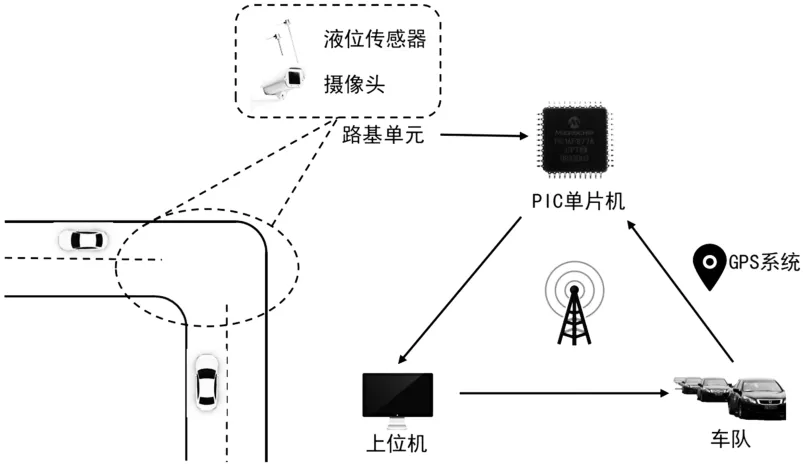
图1 系统工作原理图
3 硬件电路设计
本车队涉水转弯稳定性预警系统的硬件部分主要由供电模块、主处理器模块、5G通信模块、液位传感器模块、摄像头模块以及GPS定位模块组成。整体硬件以PIC16F877型处理器为核心,其他模块通过无线串口与主处理器连接,共同实现对车队的转弯预警功能。
3.1 供电模块
系统中,PIC16F877主处理器采用5V直流供电;5G通信模块使用2.0~3.6V直流电压;液位传感器模块输入电压采用2.2~5.5V直流电压;摄像头模块使用3.3V直流电压;GPS定位模块供电电压为2.7~3.6V。
利用一款具有代表性的集成电路LM1117-3.3芯片来实现电压转换,提供3.3V电压给各个模块,使用三端稳压块,运行精度高,结构简单,功耗低,便于使用[5]。此部分模块的电路图如图2所示。
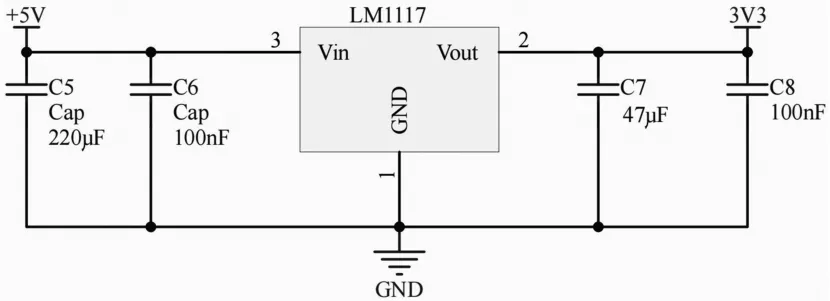
图2 供电模块电路图
3.2 主处理器模块
系统的核心硬件在于PIC单片机,通过主处理器对道路水位和车队运行状态分析处理,实现快速高效的预警和道路规划。
PIC单片机采用的是由Microchip公司所生产的PIC16F877,其串行通信模块较为先进,具有十位精度的转换[6]。与其他同类产品相比,它还具有高性能RISC CPU、内部设置看门狗定时器WDT[7]功能,以及运行速度快、低功耗、外接电路简单、可存储大量数据等优势,满足监测的需求。在MPLAB-IDE开发环境和实验板的支持下,该产品还具有在线调试功能。PIC16F877内部嵌入一个10位A/D转换器[8],配有独立的时钟信号,当处于休眠状态时,仍然可以进行数/模转换。处理器管脚情况如图3所示。
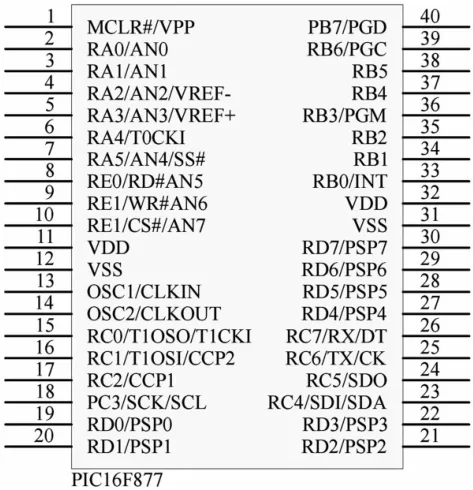
图3 PIC16F877处理器管脚示意图
3.3 5G通信模块
5G通信模块选用A5130芯片,它是一款双工作频率的无线射频收发芯片,具有容量大、延时低、接收信号灵敏度高、传输时间短等优点[9],保证信息能够实时传输,管理人员能在最快时间段内了解道路积水状态。A5130工作于5.2GHz与5.8GHz两个频段,可以轻易调频,寻找干扰较少的频段。除此之外,该芯片的自动重传、自动应答机制,也有利于降低MCU数据处理的复杂性。当该芯片不需要RF时,可开启睡眠模式,保持5μA低耗电状态,适合于车队日常出行使用。无线通信模块电路图如图4。
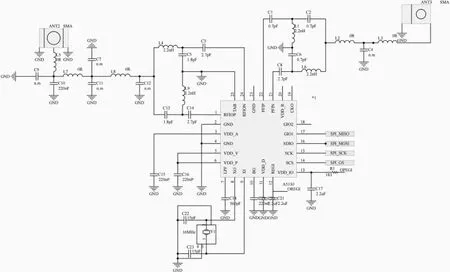
图4 无线通信模块电路图
3.4 液位传感器模块
内涝多发路段的实地水位监测以液位传感器[10]为主要基础设备,采用具有四个触摸检测通道的芯片VK36W4D进行监测。该芯片有自动校准功能,穿透能力高,集成度高,抗干扰能力强;同时其内部的集成电路拥有高电源电压抑制比,使其检测错误减少,保证在雨天积水路段仍能稳定工作。液位传感器模块电路原理如图5所示,其灵敏度由专用管脚所接电容CS决定,电容增大时,灵敏度随之增加。

图5 液位传感器模块电路图
3.5 摄像头模块
路段水位监测除依靠液位传感器外,还以摄像头作为辅助设备。实时捕捉水位图像,通过5G网络传送至上位机系统,车队的管理人员可以将数据与图像结合分析,合理规划车队的行进路线。
摄像头模块采用CMOS图像传感器的摄像头,具有低照度好、可控性强、价格低、宽动态效果好等优点,能够胜任在阴雨天气条件下传输清晰稳定的实时图像[11]。除此之外,CMOS摄像头功耗低,只在开启时会消耗电量,其余时间几乎无功耗,适合日常简单使用。此部分模块的电路图如图6所示。
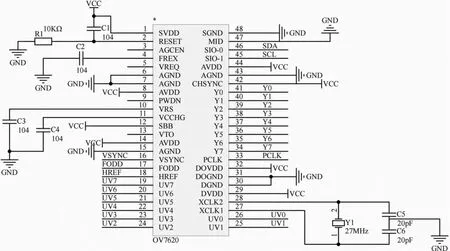
图6 摄像头模块电路图
3.6 GPS定位模块
车队定位功能采用NEO-5Q芯片,由瑞士科技公司生产。该芯片成本低、体积小,便于安装在车队的任何部位。芯片特别采用KickStart微弱信号攫取技术[12],确保能够方便快速地定位车队的实时所在位置。GPS定位模块电路图如图7所示。

图7 GPS定位模块电路图
4 系统软件设计
软件设计选用Visual Basic 6.0软件完成,搭建车队涉水转弯稳定性预警系统软件。软件主界面如图8所示。
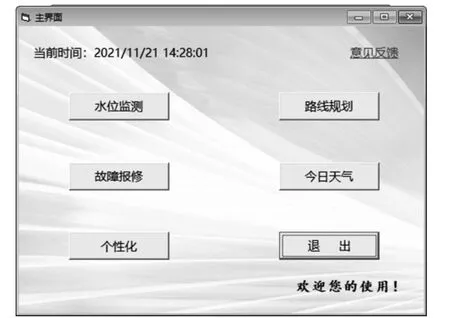
图8 软件主界面
主界面设计参考了现有设计中常见的样式[13],包括水位监测、路线规划、故障报修、今日天气、个性化、退出等功能按键,分别实现实时道路水位监测、规划合理路线、意外事故救援以及软件界面设置等功能。
系统软件的工作流程如图9所示。软件以水位监测功能为核心,通过安装于道路中的液位传感器和摄像头监测水位,数据收集完毕后被发送到主处理器进行分析和处理。
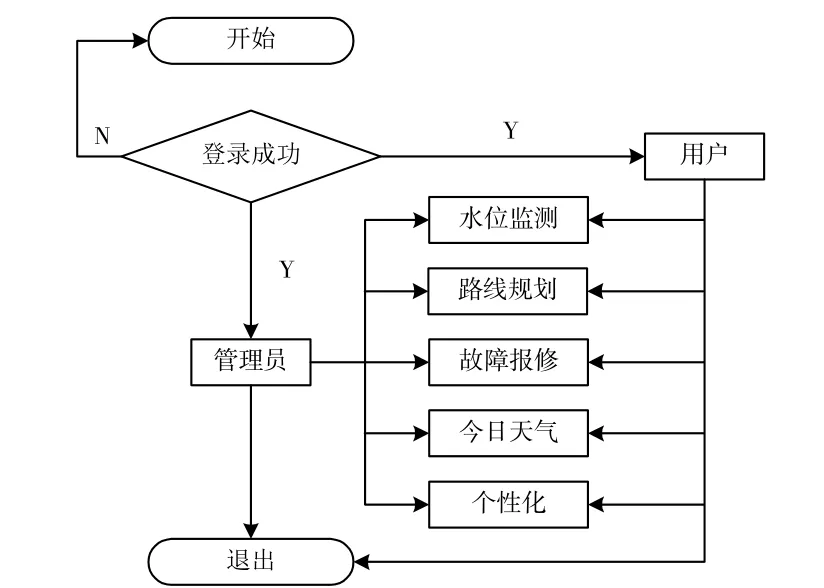
图9 系统软件流程图
软件会对不同身份的用户进行权限设置。其中路线规划以及发送预警功能为管理员特有的操作权限,其余功能管理员与用户皆可使用。
如图10所示为查询道路水位的界面,实例中以板仓街与锁金东路路口为例。管理员或用户可在此界面上选择所要查询的路段,观测路段当前水位。软件会根据当日降水量预计出未来半小时内水位。点击“实时监控”按钮即可看到路段的水位图像。该界面还能提供所选择车队的车速以及各类车辆涉水临界值等信息[14],辅助管理员更好地判断是否需要发送预警。
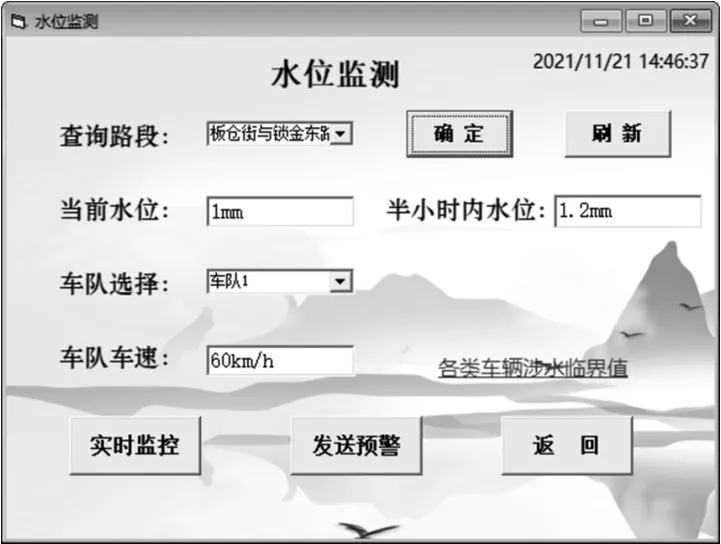
图10 水位监测界面
如图11所示为路线规划界面。管理人员输入车队当前所在路段,并选择原本所要经过的积水路段,该界面即可结合GPS定位系统为驾驶员提供更优化的路线[15],提高车队的出行效率。

图11 路线规划界面
如图12所示为故障报修界面。当车队不慎进水,或发生意外交通事故时,驾驶员或用户可以通过此界面提交车辆编号、事故地点以及故障原因;系统会为驾驶员寻找附近的救援队伍进行呼救,及时解决问题,有利于保障车内人员人身安全,同时可避免占道,节约社会资源。

图12 故障报修界面
如图13所示为今日天气界面。该界面会显示所在城市的实时天气状况,包括空气质量、温度、降水量、风向风力等信息,其中特别会通过图表的方式更加直观地为用户显示降水量变化,信息自动刷新保证了数据的准确性。管理人员可借此提前了解当日天气来预测车队出行安全性并发送相关提醒。
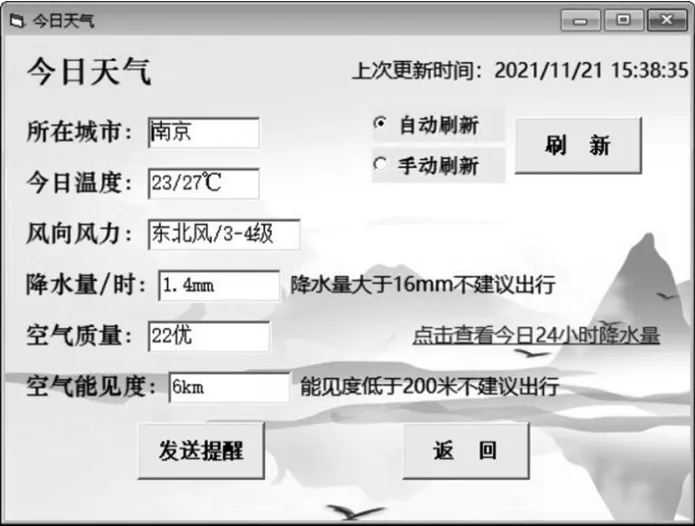
图13 今日天气界面
5 结束语
所设计系统以PIC16F877处理器为核心,用液位传感器、摄像头等设备收集路基单元和车队的各项数据,通过5G网络、GPS等技术,使用户和管理员能够及时了解路段的水位信息。管理员可通过该系统向驾驶员发送预警并及时规划合理的行进路线。系统功能多样、易于操作,具有广泛的应用前景。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10 09:37:34
数学大王·趣味逻辑(2022年3期)2022-03-17 23:53:36
汽车工程师(2021年12期)2022-01-18 06:02:43
中学生数理化·中考版(2021年4期)2021-07-22 07:22:38
汽车维修与保养(2019年2期)2019-06-19 03:48:14
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
中国自行车(2018年6期)2018-07-23 03:16:52
新作文(小学中高年级版)(2015年5期)2015-04-12 06:28:02
汽车维护与修理(2015年2期)2015-02-28 12:15:41
