基于可变形园林修剪机的模糊PID控制分析
2022-09-02 04:06李秉旭
林业机械与木工设备 2022年8期
李秉旭
(佳木斯大学机械工程学院,黑龙江 佳木斯 154003)
目前现存的绿篱修剪机器修剪的形状大部分都是平面,斜面或者波浪面[1]。很明显这种简单的绿植形状无法满足现代化城市景观设计的需要,而且智能化以及自动化程度不够。当前常用修剪机需依靠人工进行控制,对使用者的操作技能要求高,智能化程度偏低、浪费成本且工作繁重,为克服这一难题,需要引入计算机控制技术,完成自动修剪[2-3]。
目前常用的控制算法有PID控制、自适应控制、鲁棒控制、迭代学习控制、滑膜变结构控制、反馈控制等控制方法[4-5]。其中PID控制在机械控制中得到了广泛的应用,但是针对修剪机这种对自适应和抗干扰能力要求较高的控制系统,传统的PID控制不能保证修剪机的动态和静态特性,无法在遇到外部干扰时做出最优的控制决策[6-16]。于是需要结合现有已经成熟的控制算法,设计一种更加智能的控制策略,为复杂且不确定的修剪机控制系统提供更能解决相关问题的控制方法。
1 园林灌木修剪机可变形结构及功能简介
修剪机需要根据灌木高度和树冠直径进行定位调节,再通过末端执行器的回转完成修剪工作,其工作原理主要包括五个运动方式:升降运动、伸缩运动、刀具组变形运动、刀锯往复切削运动和旋转台旋转运动。如图1所示为灌木修剪机整体结构装配图。
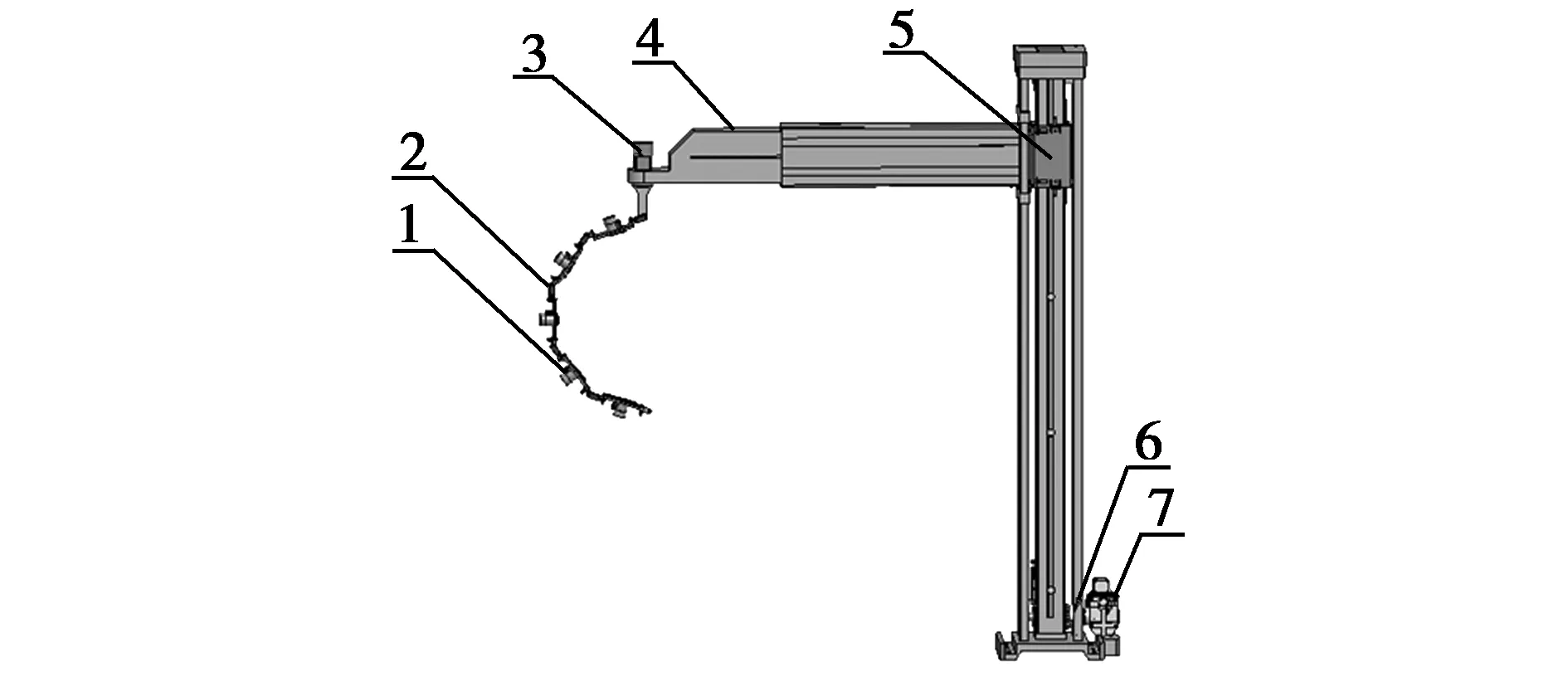
图1 修剪机整体结构图1.子刀具电机;2.关节舵机;3.旋转电机;4.伸缩臂;5.升降台;6.链轮;7.升降电机
修剪机进入修剪工作环境中,根据灌木的高度,首先控制升降电机7驱动链轮6转动,使链轮与链条进行啮合传动,升降台5通过链条的传动实现竖直方向移动,调节到与灌木高度合适的修剪位置;接下来伸缩臂4根据灌木树冠直径,通过电推杆进行的伸缩运动,使旋转台对准灌木树冠中心;控制系统控制末端执行器中关节舵机2进行角度调节(末端执行器安装五个关节舵机,文中只对一个舵机进行标注),使刀具组完成变形功能,变形修剪功能包括球形修剪功能、圆柱修剪功能、圆台形修剪功能和圆锥修剪功能等,如图2所示;变形运动完成后,各子刀具电机1转动,带动子刀具上的刀锯进行往复切削运动,对树枝进行切削;最终控制旋转电机3带动末端执行器完成回转运动,完成期望的灌木造型修剪。
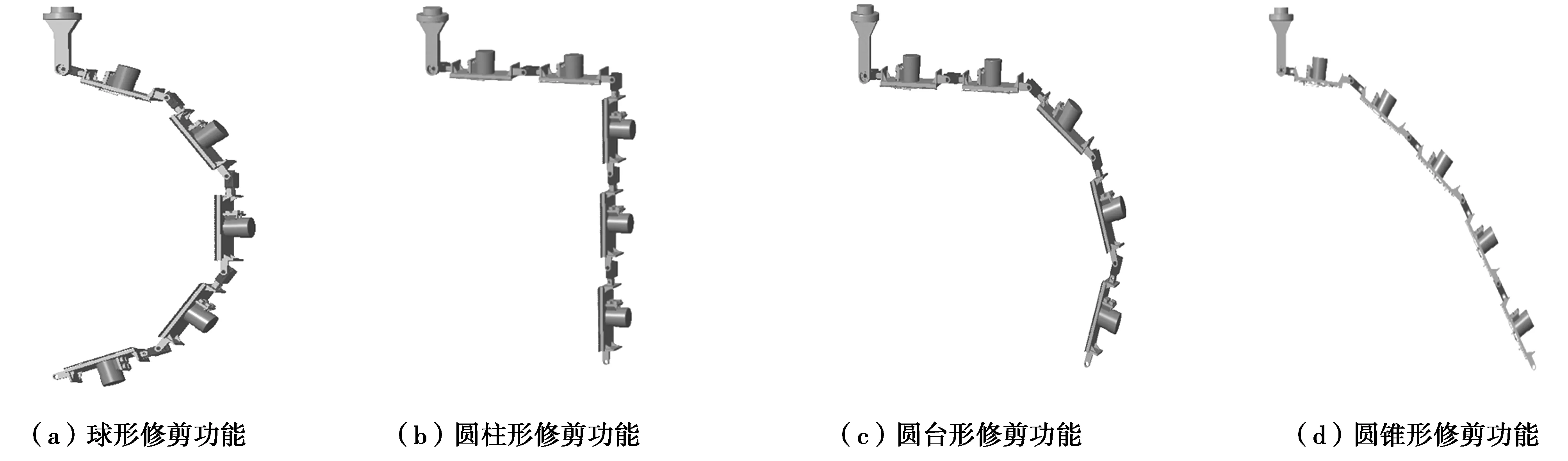
图2 修剪机末端执行变形功能图
2 园林灌木修剪机可变形关节驱动系统建模
修剪机关节舵机选用型号为LX-824数字舵机,具有控制精度高、耐用、噪音小和扭矩大等特点。舵机内部组件有直流电机、减速机构、控制器等,其中电机为舵机输出动力源,控制器控制电机输出动力,通过减速机构提高转矩,驱动负载运动[17-18]。末端修剪器中的关节舵机数学模型是在忽略部件间摩擦阻力,以及电子元件间耦合现象等其他次要因素的条件下进行建立,如图3为关节舵机的线性传递框图,其中uc为PWM输入电压;KPWM为PWM增益放大系数;为电机总电感;Ra为电机回路总电阻;KT为转矩系数;J为输出轴上的转动惯量;∂为舵机最终输出转角;Ke反电动势系数;θ为直流电机的旋转角度;i为减速机构传动比;Kf为电位计反馈系数。
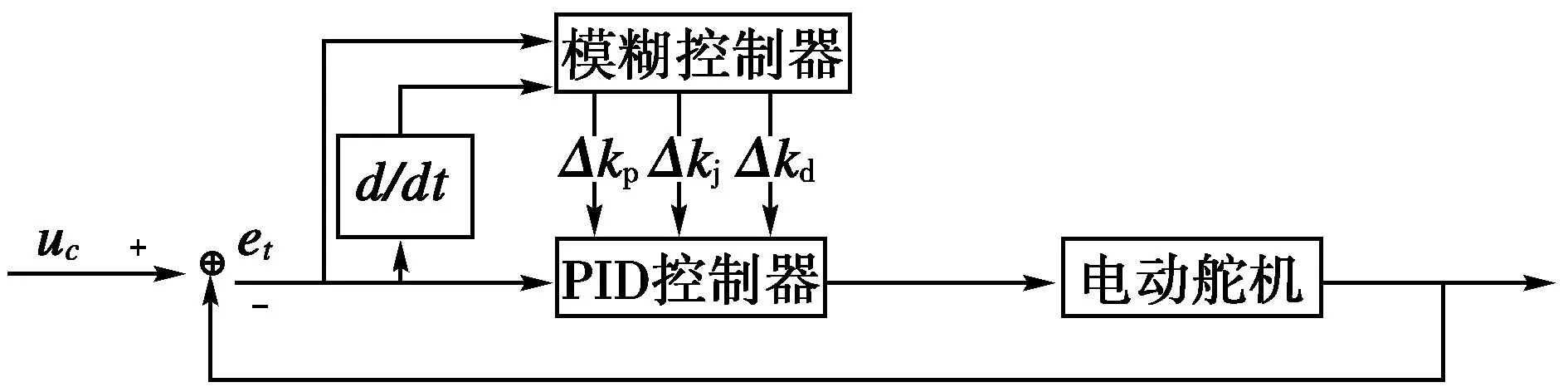
图3 关节舵机线性传递函数框图
由图3的关节舵机的线性传递框图,可以得到以下运算:
(1)
(2)
本课题选用舵机中的电机为MAXON的EC系列的电机,技术参数如表1所示。
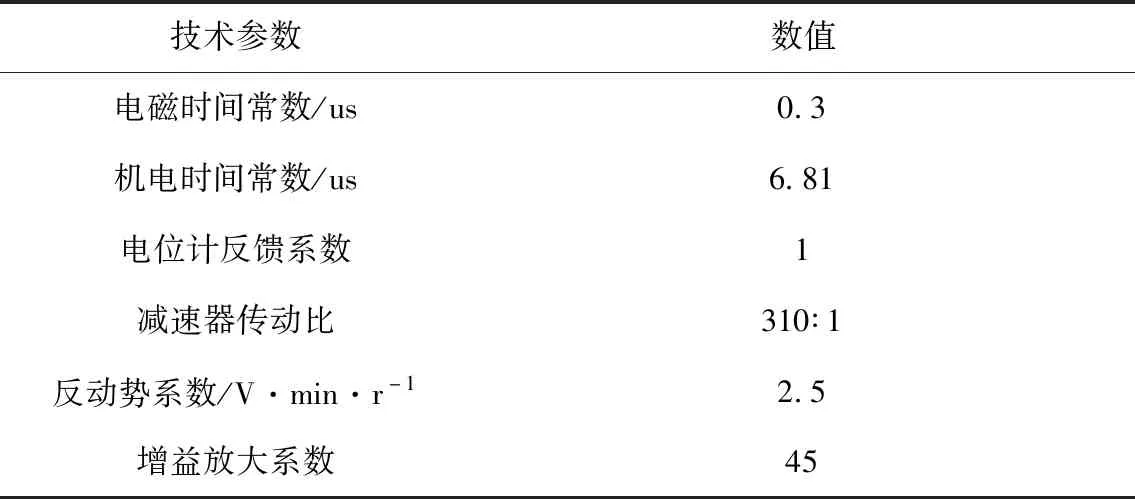
表1 舵机技术参数
从参数表中可得,i=310,KPWM=45,Ke=2.5,Kf=1,tm=6.81 um,te=0.3 um。
(3)
从式(3)中可以看出,舵机传递函数的三次项系数相比于二次项系数和一次项系数以及常数项要小很多,于是三次项对于系统的影响基本上可以说是微乎其微,因为处于设计方便的角度考虑,忽略三次项系数,对传递函数进行简化可得:
(4)
3 园林灌木修剪机可变形关节模糊PID控制器设计与研究
3.1 模糊PID控制器设计
模糊PID结合了模糊控制和PID 控制的特点,利用模糊控制来实现对PID控制参数的自动整定,控制器原理如图4所示。
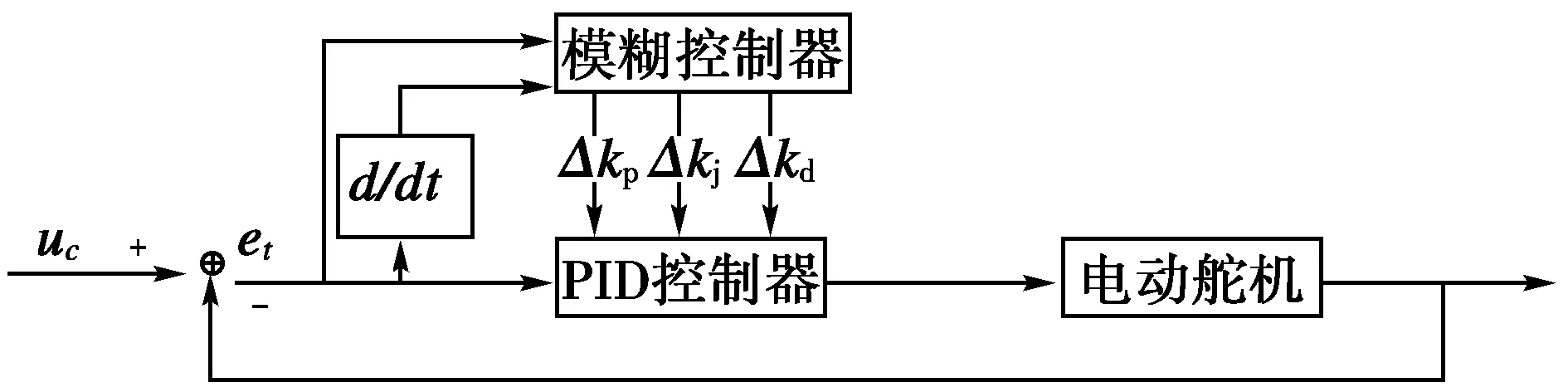
图4 模糊PID控制器原理图
模糊PID控制器将关节舵机角度误差e(t)和角度误差变化率ec(t)为输入量,ΔKp、ΔKi、ΔKd作为模糊控制器的输出量[19]。如图5所示,在Simulink Fuzzy控制器中进行两输入三输出的模糊控制,控制器输出值与初始PID参数进行相加,形成新的PID控制参数,公式如下:
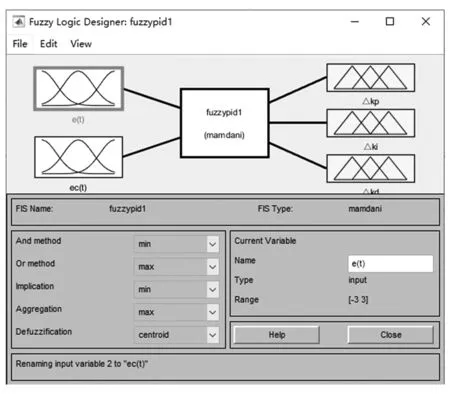
图5 模糊控制输入输出量

(5)
在进行模糊控制之前,需要确定输入量和输出量的基本论域。通过线性变化将基本论域映射到模糊集论域中,减少计算机的运算、有利于数值集合的处理。
因为模糊PID控制是在常规PID控制的基础上进行设计,于是误差和误差变化率基本论域、模糊PID控制中ΔKp、ΔKi、ΔKd三个参数的基本论域可以在常规PID控制中进行估算。最终设定输入值e(t)、ec(t)的模糊集论域设定为[-3,3],根据输出的基本论域将输出值ΔKp和ΔKi的模糊集论域设定为[-6,6],ΔKd的模糊集论域为[-1,5]。
选定语言变量[NB NM NS ZO PS PM PB]为模糊子集,子集中的元素分别代表[负大 负中 负小 零 正小 正中 正大],首先根据专家知识库来决策出误差e(t)和误差变化率ec(t)与PID三个参数之间的关系初步设定模糊控制规则[20],但是实际控制效果不理想。又基于实际控制操作中三个参数ΔKp、ΔKi、ΔKd对控制系统输出特性的影响,以及相应的参数整定规则[21],在现有的控制规则表上进行更改,经过多次的试错过程,归纳出系统在被控制过程中对于不同的误差e(t)和误差变化率ec(t)的自动调节规则,最终设定模糊控制规则。模糊控制规则见表2。
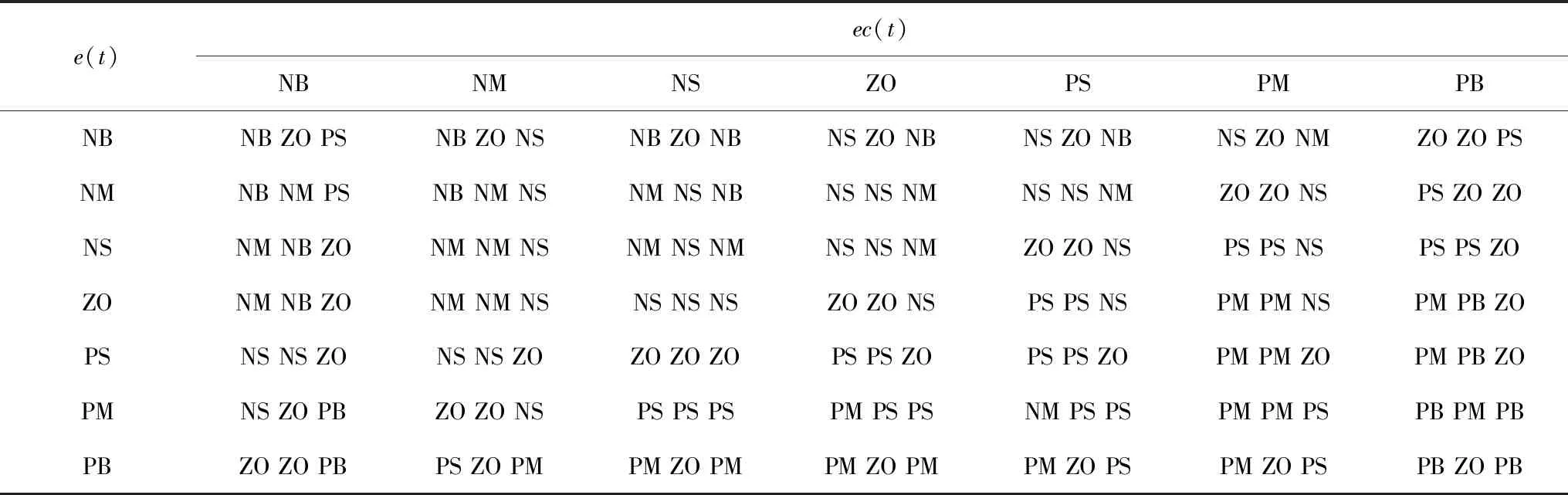
表2 模糊控制规则
模糊规则的曲面如图6所示。
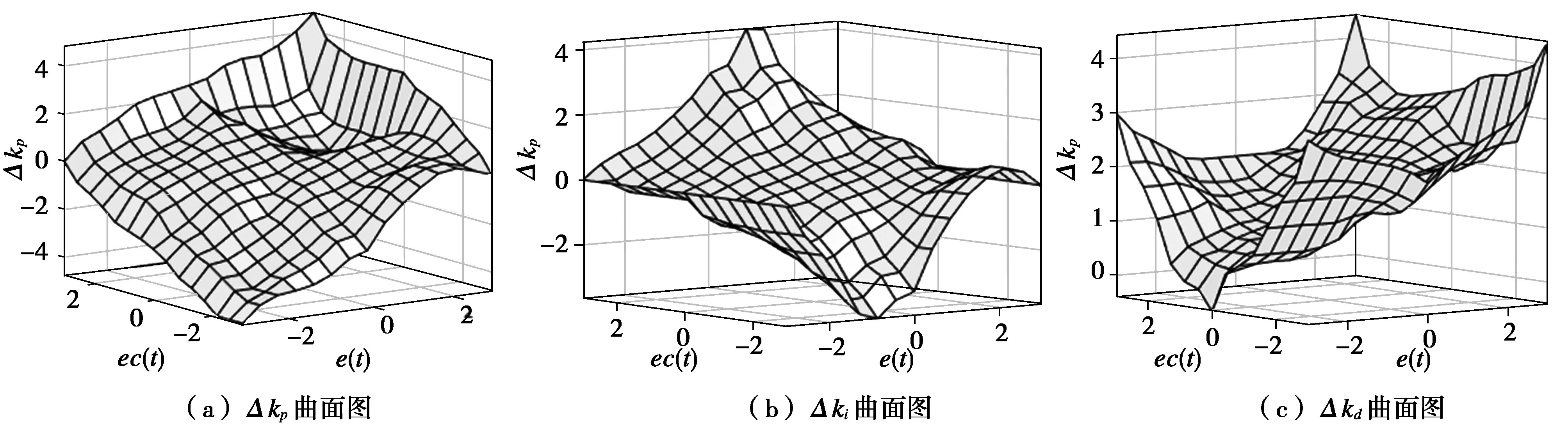
图6 模糊规则输出曲面
完成模糊规则的设定,需要根据模糊子集确定隶属度函数,量化论域上模糊子集由隶属度函数u(k)来描述,取值范围为[0,1]。输入值对模糊子集的隶属程度越高,u(k)的值越大,数值上越接近于1。根据专家经验进行确定,e(t)、ec(t)作为输入量,NM,NM,ZO,PS,PM的隶属度函数采用trimf(三角形)函数,NB和PB选用zmf(z形)函数,防止输入量超出范围,如图7所示。
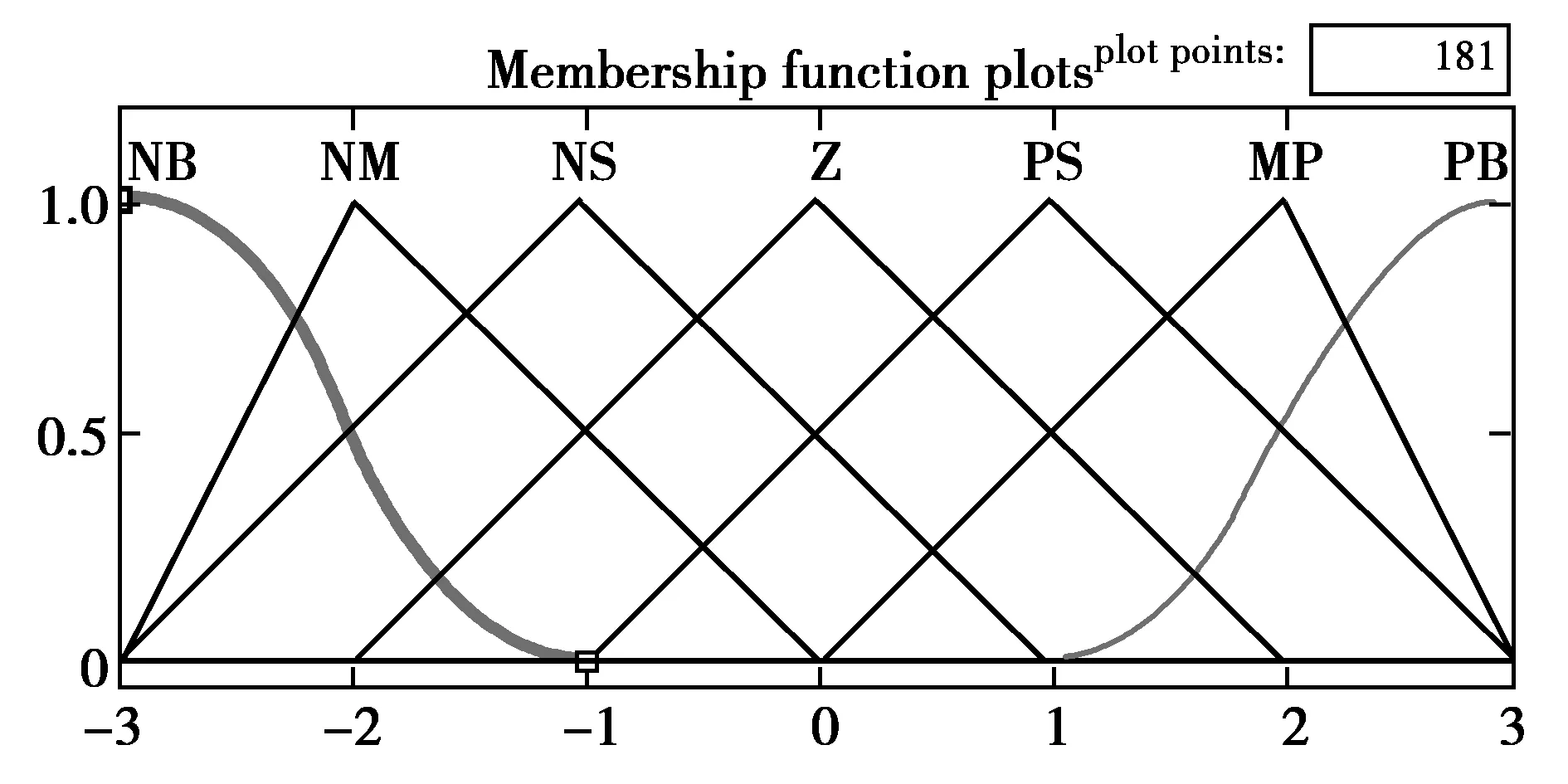
图7 输入量隶属度函数
输出量模糊集子集中NM,NM,ZO,PS,PM的隶属度函数采用trimf(三角形)函数,NB和PB选用zmf(z形)函数,防止输入量超出范围,如图8所示。
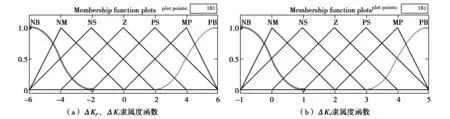
图8 输出量隶属度函数
控制器采用Mamdani模糊推理算法,采用极小运算规则定义模糊蕴含的表达式关系,每一条规则推理后得到的输出是变量的分布隶属度函数的模糊几何。将多条规则的结果合成以后,对每一个输出变量模糊几何都需要进行解模糊化处理,以得到时间问题希望的输出。
3.2 模糊PID控制器性能分析
在Matlab Simulink环境下搭建修剪机舵机关节模糊PID控制仿真模型,将上一节建立的模糊控制器上传到Matlab的workspace中,在仿真模型中进行调用,同样选用单位阶跃信号作为控制系统的输入信号,得到模糊PID控制仿真结果,和开环控制、PID控制进行对比分析。如图9所示,a为simulink仿真框图,其中对模糊控制器和PID控制器进行了封装,便于仿真绘制。如图10为模糊PID曲线响应图。
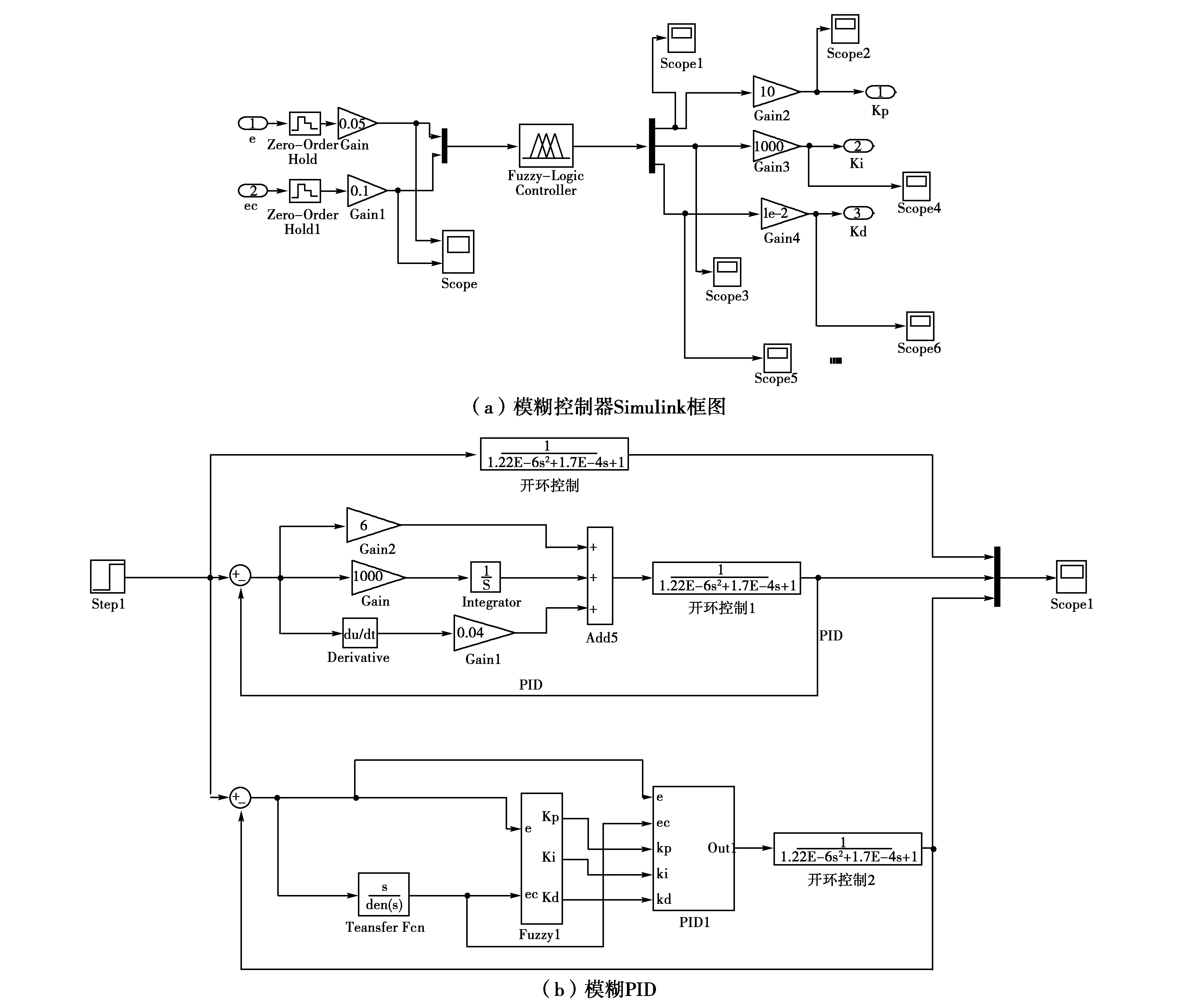
图9 模糊PID控制Simulink模型框图[1]
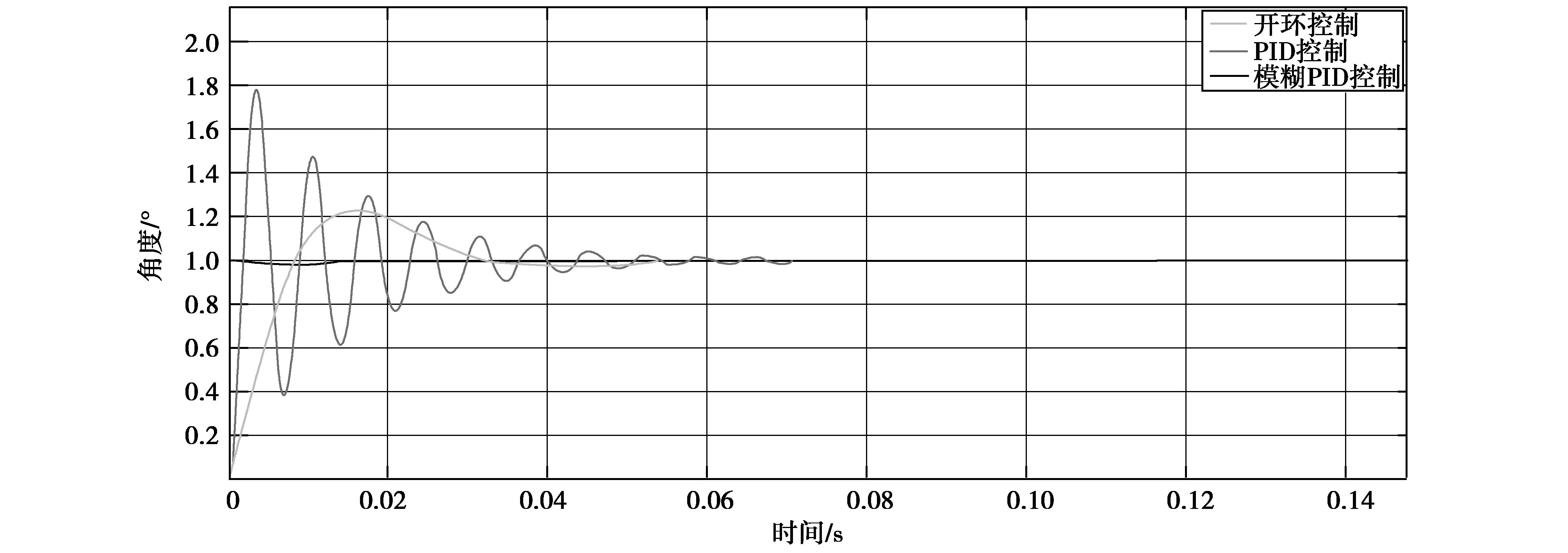
图10 模糊PID控制Simulink曲线响应图
如表3,为开环控制、PID控制和模糊PID控制曲线相应结果对比表。
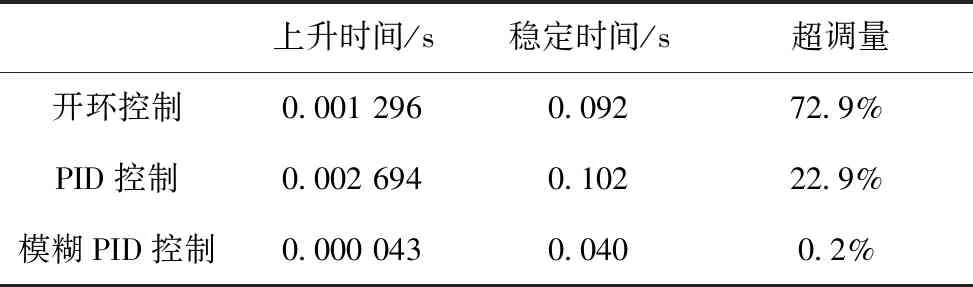
表3 控制仿真结果对比数据
对比三种控制的仿真结果,可以得出模糊PID控制的上升时间为0.000 043 s,稳定时间为0.040 s,超调量为0.2%。相比于开环控制和PID控制在稳定性、稳定时间上都有极大的提升,同时调节速度也相比于其他两种控制取得了极大的提升,可以实时的对PID的参数进行整定,具有极高的自适应能力,符合修剪机舵机关节的控制要求,对关节的驱动具有很好的调控性能。
鉴于模糊PID控制系统超调量小、稳定快、振荡少等特点,符合修剪机舵机关节控制要求。但灌木修剪机工作环境复杂,在园林修剪中会遇到外力干扰,从而改变修剪机舵机关节的旋转角度,最终导致对灌木的修剪形状不准确,于是需要对模糊PID控制进行抗干扰性分析。参考已经建立的模糊PID控制的Simulink仿真模型,在控制系统已经稳定之后加入干扰信号,模拟修剪机在工作中受到外力的情况,进行仿真分析,在0.1 s的叠加一个幅值为1.2的脉冲信号,仿真框图11所示,仿真曲线响应如图12所示。
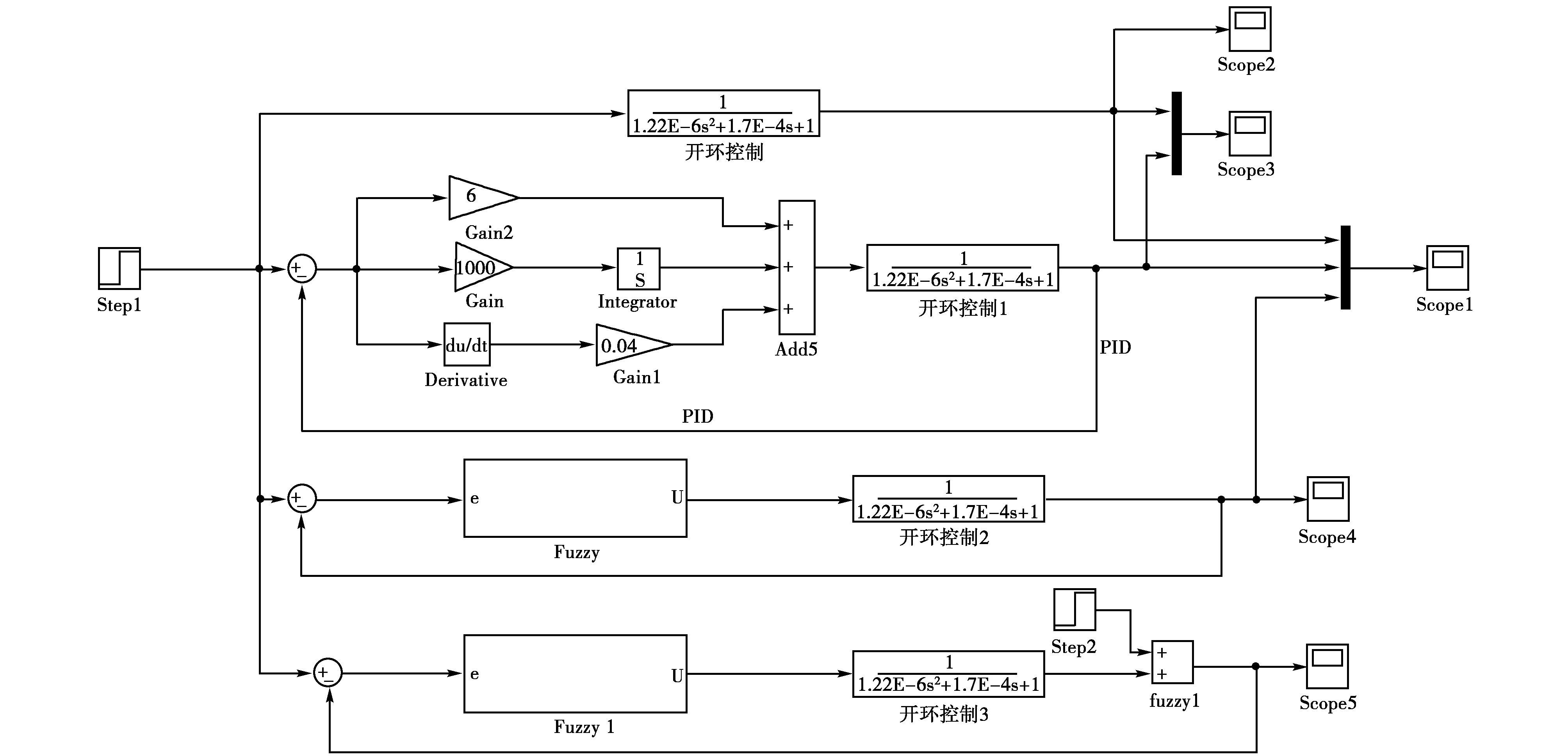
图11 干扰下模糊PID控制的Simulink模型框图
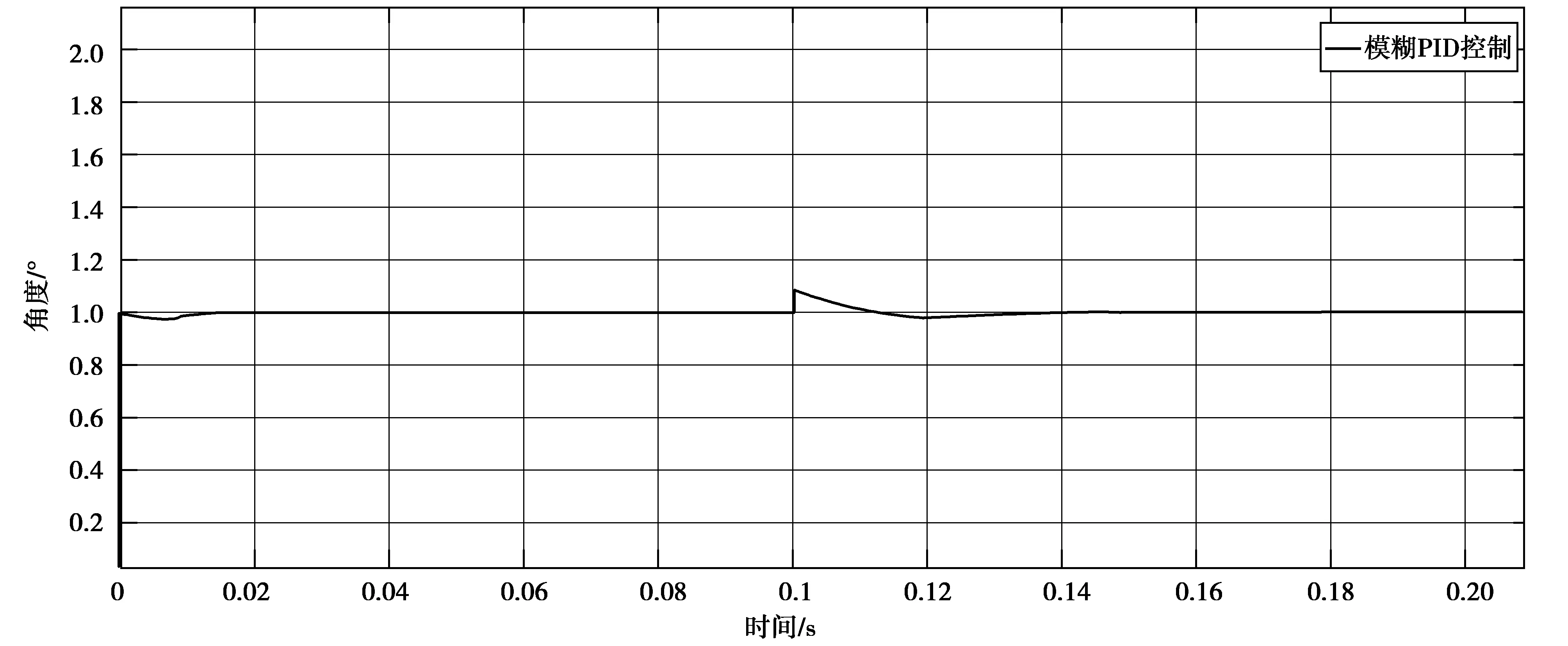
图12 干扰下模糊PID控制的Simulink曲线响应图
由图可以得出,模糊PID控制在受到干扰后,经过0.041 s的调整后曲线趋于稳定,证明模糊PID控制具有很强抗干扰能力。且收敛速度快,超调量小,满足在复杂工作环境中,对修剪机关节舵机的精准控制。
4 结论
完成对修剪机关节舵机的数学模型建立,完成了模糊控制器的设计。根据关节舵机的数学模型,在MATLAB Simulink环境中对比了开环控制、传统PID控制和模糊PID 控制系统,对比三种控制的仿真结果,得出模糊PID控制具有更高的稳定性,稳定所需时间短,同时调节速度取得了极大的提升,可以实时对PID的参数进行整定,具有极高的自适应能力,符合修剪机舵机关节的控制要求。考虑到灌木修剪机工作环境复杂,在园林修剪中会遇到外力干扰,对模糊PID控制进行抗干扰性分析。加入干扰后的结果表明,模糊PID控制系统收敛速度快,超调量小,满足在复杂工作环境中,对修剪机关节舵机的精准控制。
猜你喜欢
教育周报·教研版(2022年12期)2022-05-10
诗潮(2019年10期)2019-11-19
阅读与作文(英语高中版)(2019年9期)2019-11-07
中学生数理化·高一版(2017年1期)2017-04-25
诗潮(2017年2期)2017-03-16
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
新高考·高一物理(2014年4期)2014-09-17
中国信息技术教育(2014年5期)2014-03-17