智能网联卡车车队混合流通行能力分析方法
2022-08-30 02:41:26秦严严朱宜文朱立唐鸿辉
交通运输系统工程与信息 2022年4期
秦严严,朱宜文,朱立,唐鸿辉
(重庆交通大学,交通运输学院,重庆 400074)
0 引言
目前,国内外均已实施网联自动驾驶的道路测试,以推进其落地运营,其中物流园区及港口干线运输成为网联自动驾驶落地应用的重要潜在场景[1]。智能网联卡车承担物流园区及港口干线的运输任务,这些智能网联卡车的运行时间和运输路线相对固定、容易形成车队,使得智能网联卡车车队应运而生。智能网联卡车车队有望显著提升运输能力[2],促进智慧物流与经济的协同发展[3],与此同时,在完全自动驾驶阶段之前,智能网联卡车车队与常规卡车以及常规小汽车混行的局面将长期存在[4]。因此,从混合交通流层面研究智能网联卡车车队的通行能力具有重要现实意义。
国外在智能网联卡车车队领域的研究开展较早,Nils 等[5]在智能网联卡车出发点和终点相同的条件下,建立了智能网联卡车组队的方式及组队成功的概率计算方法。Tsugawa 等[6]认为由2~3 辆智能网联卡车组成车队可以提高25%的通行能力,由10 辆智能网联卡车组成车队可以增加1 倍以上的通行能力。Calvert等[7]对智能网联卡车车队进行仿真研究表明,交通需求小于交通容量的80%时,卡车车队对交通流通行能力的影响较小,而在道路容量接近饱和时的影响较大。Ramezani 等[8]在加州货运通道上进行智能网联卡车车队试验,开发了智能网联卡车车队模型,用实测数据证明智能网联卡车车队对混合流通行能力的提升。Jo等[9]通过微观仿真对韩国高速公路的智能网联卡车车队进行研究,计算结果表明,考虑卡车车队和未考虑卡车车队的交通量之比大于1,证明了卡车车队可提高混合交通流通行能力。国内也在积极推进智能网联卡车车队相关研究,马新露等[10]应用元胞自动机模型对人工驾驶小汽车和智能网联卡车混合流进行了仿真研究,仿真结果表明,智能网联卡车有利于道路通行能力的提升。上海洋山港通过搭建路侧设备,实现智能网联卡车的自动跟车以及紧急制动等功能,在洋山港主要运输路段东海大桥实现了L4 级智能网联卡车车队自动驾驶,从而大幅提升了东海大桥的运输能力[11]。
综上所述,现有研究成果主要关注于智能网联卡车车队本身对通行能力的提升作用,然而在智能网联卡车车队规模的动态性以及车辆随机分布特性造成的混合交通流状态类型等方面,开展智能网联卡车车队混合交通流通行能力的研究较少。鉴于人工驾驶车辆和智能网联卡车混合行驶的研究热点和未来长期存在的必然性,本文针对由智能网联卡车、人工驾驶卡车以及人工驾驶小汽车组成的混合交通流为研究对象,从智能网联卡车车队规模和混合交通流随机态势两个方面提出智能网联卡车车队混合交通流通行能力的通用性分析方法,并通过案例分析验证其可行性。
1 研究对象
相较于传统人工驾驶卡车,智能网联卡车在道路上运行时通过车载设备与网联技术可以实现卡车间行驶信息的实时交互,形成柔性的智能网联卡车车队。本文以人工驾驶小汽车、人工驾驶卡车及智能网联卡车车队组成的混合交通流为研究对象,如图1所示。
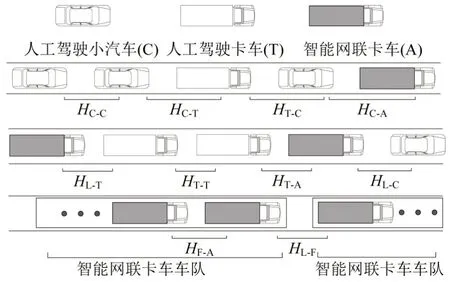
图1 混合交通流示意图Fig.1 Diagram of mixed traffic flow
针对图1中混合交通流,车辆在空间位置上具有随机性,根据前后车辆不同类型,可以分为不同的跟驰类型。当目标车辆为人工驾驶小汽车时,其在混合流中可分别跟驰人工驾驶小汽车、人工驾驶卡车及智能网联卡车,共有3 种跟驰类型,分别记为HC-C、HC-T和HC-A,如表1所示。同理,当目标车辆为人工驾驶卡车时,其在混合流中可分别跟驰人工驾驶小汽车、人工驾驶卡车及智能网联卡车车队,共有3 种跟驰类型,分别记为HT-C、HT-T和HT-A。
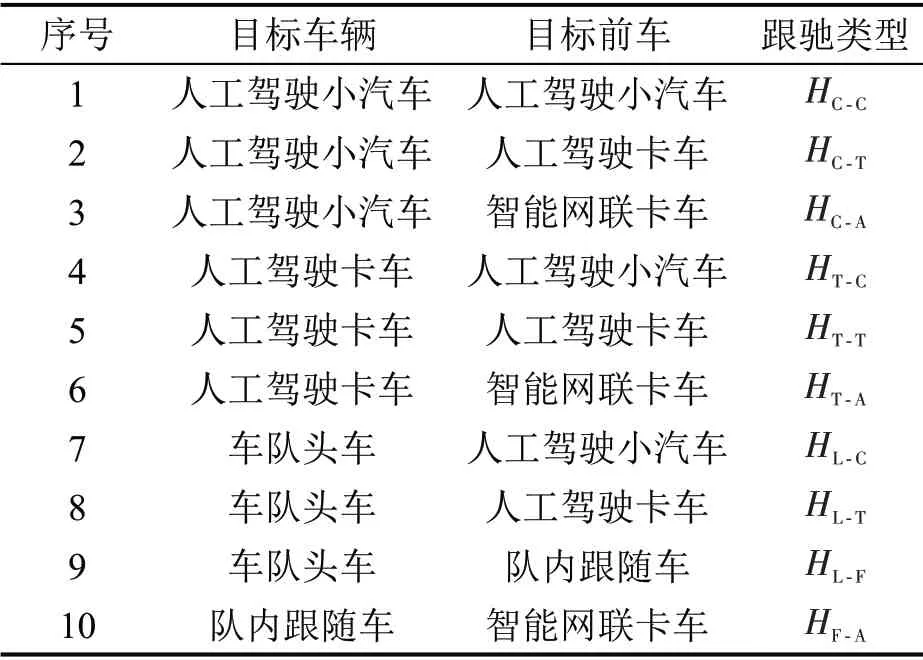
表1 混合交通流中跟驰类型Table 1 Car following type in mixed traffic flow
对于智能网联卡车车队而言,根据车队中卡车的位置特性,智能网联卡车可分为头车与车队内跟随车两种类型。同时,当其车队规模超过最大车队规模n时,上游智能网联卡车车队则单独构成柔性车队,因此,当目标车辆为车队头车时,其在混合流中可分别跟驰人工驾驶小汽车、人工驾驶卡车和下游另一辆智能网联卡车车队的最后一辆车,共有3种跟驰类型,分别记为HL-C、HL-T和HL-F。对于HL-C和HL-T两种跟驰类型而言,由于人工驾驶小汽车与人工驾驶卡车无法为智能网联卡车车队的头车提供车车通信,该智能网联卡车车队的头车将以自适应巡航控制(Adaptive Cruise Control,ACC)方式跟驰运行[12]。对于HL-F跟驰类型而言,上游智能网联卡车车队的头车将以协同自适应巡航控制(Cooperative Adaptive Cruise Control,CACC)方式跟驰下游智能网联卡车车队行驶[13]。最后,当目标车辆为队内跟随车时,其前车为智能网联卡车,均以CACC方式跟驰行驶,记为HF-A。
2 通行能力分析方法
2.1 概率推导
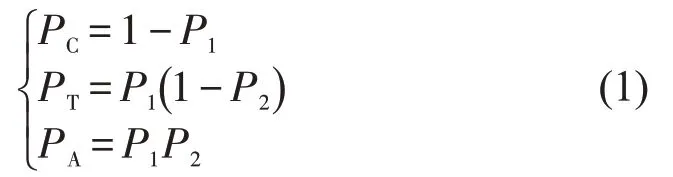
根据第1 节对智能网联卡车车队混合流内各跟驰类型的分析,设定高速公路基本路段上所有卡车的比例为P1,所有卡车中智能网联卡车的比例为P2,计算混合交通流中人工驾驶小汽车、人工驾驶卡车、智能网联卡车的比例PC、PT、PA分别为
根据式(1),推导目标车辆为人工驾驶小汽车时,3 种跟驰类型HC-C、HC-T和HC-A的概率P(1)、P(2)、P(3)分别为
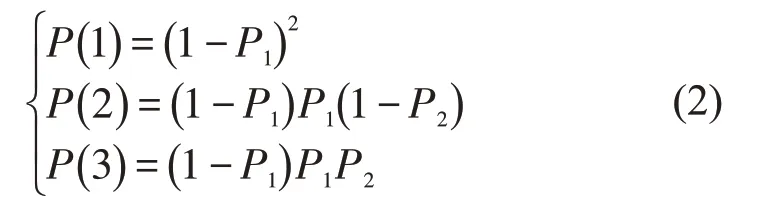
同理,当目标车辆为人工驾驶卡车时,3种跟驰类型HT-C、HT-T和HT-A的概率P(4)、P(5)、P(6)分别为
当目标车辆为智能网联卡车车队头车时,可直接计算智能网联卡车车队头车在ACC 模式下,跟驰类型HL-C和HL-T的概率P(7)和P(8)分别为
对于跟驰类型HL-F的概率P(9)和跟驰类型HF-A的概率P(10),本文根据概率论进行推导计算。设j为智能网联卡车车队中从前往后数第j辆卡车(1 ≤j≤n,n为车队最大规模),即该智能网联卡车车队的实际规模大于等于j,由于随机混合交通流中智能网联卡车车队的实际规模并非完全一致,因此,用y(j)表示智能网联卡车车队混合流中各车队中出现第j辆卡车的概率之和。根据目标车及前车的比例可得到车队各位置车辆(除头车外,即j≥2)概率表达式为

智能网联卡车车队头车的概率推导公式为

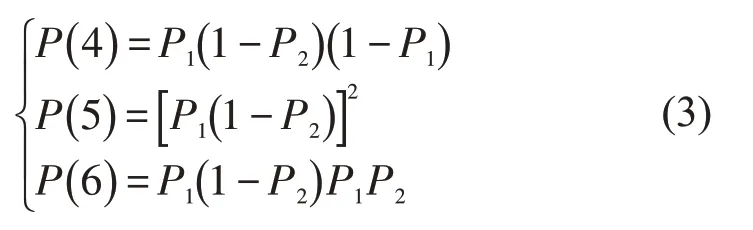
由式(5)和式(6)可推导出智能网联卡车车队头车在CACC模式下,跟驰类型HL-F概率表达式为

根据式(6)和式(7)计算智能网联卡车跟驰类型HL-F概率P(9)和车队头车概率y(1)分别为
最后根据式(5)和式(8)可得队内跟随车跟驰类型HF-A的概率P(1 0)为

2.2 通行能力计算
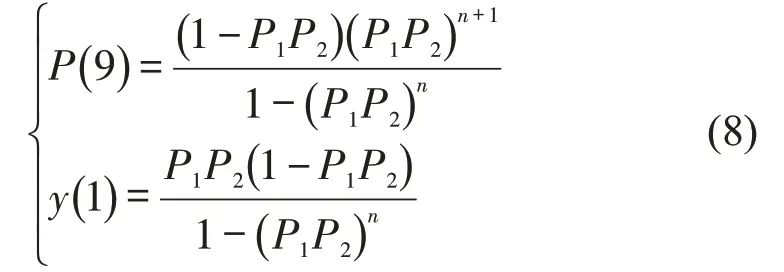
根据2.1节概率推导和表1得到的10种跟驰类型,定义混合流在平衡态下10 种跟驰类型的车头间距分别为Si(i=1,2,…,10),计算得到混合流平衡态下的平均车头间距为

根据平均车头间距与密度(K)的关系,密度、交通量(Q)、速度(V)三者的关系,得到混合流交通量为
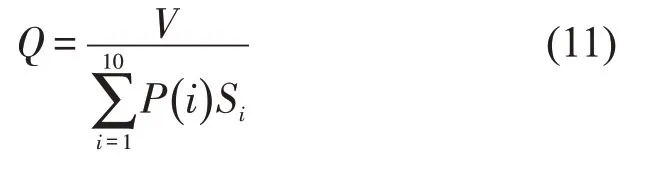
智能网联卡车车队混合流中车辆种类不一,用实体交通量无法准确评估智能网联卡车车队对通行能力的影响,故采用车辆转换系数(Passenger Car Equivalents,PCE)表征混合流通行能力的变化,美国《道路通行能力手册》中卡车ET计算方法为

式中:PT为卡车的比例;QC为仅有标准车辆(人工驾驶小汽车)的交通量;QT为加入卡车后的交通量。
根据式(12)得到智能网联卡车车队混合交通流对应的卡车ETP计算公式为

根据式(13)中ETP的变化分析智能网联卡车车队对混合交通流通行能力的影响,由ETP计算式可知,ETP的值越小,通行能力越大。同时,结合式(11),通过对智能网联卡车车队最大规模n取不同值进行计算对比,可确定综合条件最优的智能网联卡车车队规模。
2.3 混合流相对熵
为分析车辆随机分布特性对混合流通行能力的内在影响机理,将混合流分为随机态、优势态和劣势态这3种态势,3种态势车流特征如图2所示。
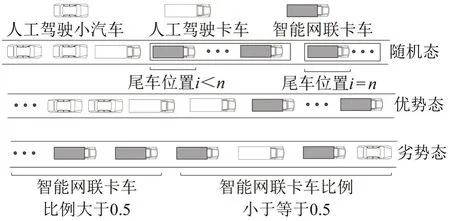
图2 车流态势示意图Fig.2 Diagram of traffic flow situation
图2中,随机态车流为车辆在道路上随机到达所形成的交通流,包含未到达最大规模的车队,2.2节通行能力计算针对的即是随机态车流;优势态车流则为智能网联卡车和人工车辆在空间上完全分离的状态车流;劣势态车流中的人工驾驶车辆和智能网联卡车“一一间隔”,故当智能网联卡车比例不大于0.5 时,所有智能网联卡车被人工驾驶小汽车或人工驾驶卡车一一隔开,前车均为人工驾驶车辆,故均以ACC控制方式行驶,当智能网联卡车比例大于0.5时,超过0.5比例的智能网联卡车才能跟驰智能网联卡车形成以CACC 方式跟驰行驶的智能网联卡车车队[14]。
将高速公路基本路段的车流看做一个整体,各跟驰类型看作随机事件,当整个车流为一列车队规模不受限制的智能网联卡车车队时,记为理想车流并服从A(x)分布,高速公路单车道基本路段真实车流服从Bm(x),m=1,2,3 分布,随机态、优势态和劣势态车流分别服从B1(x)、B2(x)和B3(x)分布。A(x)和Bm(x)分布分别为
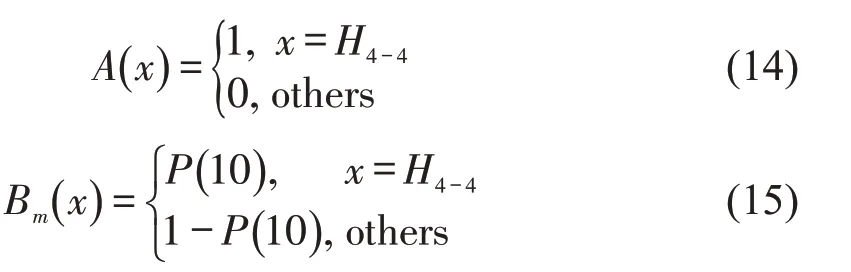
相对熵用来描述两个概率分布的差异,差异越大则相对熵就越大,相对熵表达式为

根据式(11)和式(16)可推导出混合流相对熵与混合流交通量的数学表达式为
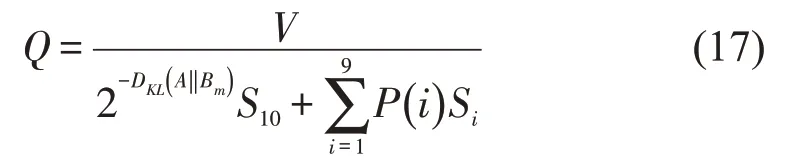
真实车流与理想车流的相对熵越大,表明真实车流与理想车流的差异越大,即真实车流的通行能力越低,以此根据相对熵的变化来分析3种状态车流之间的差异。由式(17)可知相对熵与通行能力呈负相关,通过计算相对熵可验证ETP对通行能力分析的适用性,同时,通过对比3 种态势车流相对熵的变化趋势,可分析引导车流状态得到通行能力增大的策略。
3 案例分析
3.1 跟驰模型
加州大学伯克利分校PATH实验室应用智能网联卡车进行了实地测试,验证得出,用于描述智能网联卡车车队和人工驾驶车辆跟驰行为的跟驰模型[8]。本文选择这些通过实测数据标定的跟驰模型,以此开展案例分析。
3.1.1 智能网联卡车跟驰模型
智能网联卡车为ACC 跟驰模式时,车队头车在ACC控制模式下的跟驰行为[8]为

式中:a(t)为t时刻的输出加速度,bf为最大减速度限制,人工驾驶卡车和人工驾驶小汽车标定值分别为1.77 m·s-2和3 m·s-2;aF(t)为最大加速度限制,aG(t)和aACC(t)为对比加速度值,表达式[8]分别为
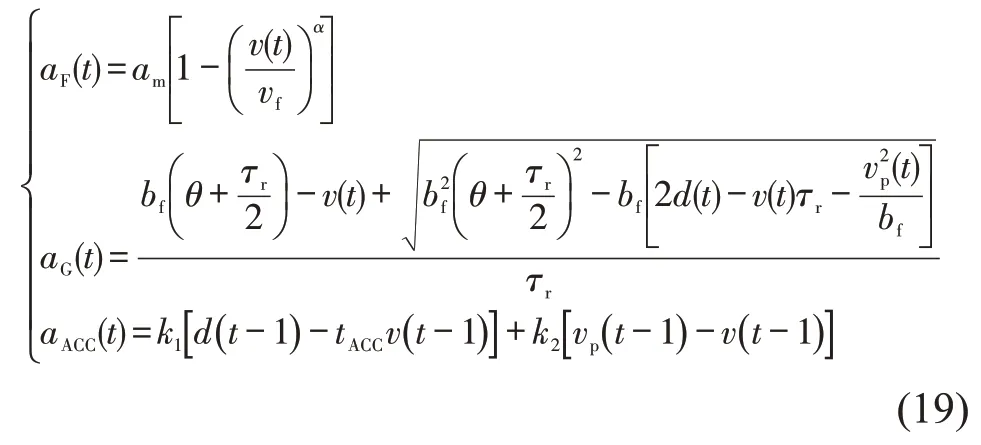
式中:v(t)为目标车辆在t时刻速度;d(t)为目标车辆在t时刻与前车的间距;vp(t)为前车在t时刻速度;α为加速度指数,取值为4;vf为自由流速度,本文取85 km·h-1;am为加速阶最大加速度值,人工驾驶卡车和人工驾驶小汽车标定值分别为5.5 m·s-2和2.5 m·s-2;θ为安全延时,标定值为0.26 s;τr为反应时间,标定值为1.3 s;tACC为ACC 跟驰车间时距,标定值为2 s;k1、k2为ACC 控制系数,标定值分别为0.0561 s-2、0.3393 s-1。
根据表1,智能网联卡车在ACC方式下的跟驰类型为HL-C和HL-T对应的平衡态车头间距S7和S8为

式中:s0为最小安全距离,取值为2 m;lp为前车车身长度,卡车车身长度为16 m,小汽车为5 m。
智能网联卡车为CACC跟驰模式时,其跟驰行为[8]为
式中:e(t-1)为目标车在t-1 时刻与前车的车间距误差;(t-1)为t-1 时刻车间距误差的微分;a(t-1)为目标车在t-1 时刻的加速度;tCACC为CACC跟驰车间时距,跟驰类型HL-F和HF-A的标定值分别为1.8 s、1.2 s;kp、kd为控制系数,跟驰类型HL-F的kp、kd标定值分别为0.0074 s-2、0.0805 s-1,跟驰类型HF-A的kp、kd标定值分别为0.0038 s-2、0.0650 s-1。
智能网联卡车在CACC 控制方式下的跟驰类型为HL-F和HF-A,其平衡态车头间距S9和S10的表达式为
3.1.2 人工驾驶车辆跟驰模型
人工驾驶车辆模型仍然选取由PATH实验室实车测试中标定的人工驾驶车辆模型,其跟驰行为[8]为
式中:aF(t)、aG(t)和aN(t)为3 个对比加速度值,且aF(t)和aG(t)的表达式如式(19)所示;τn为车间时距,人工驾驶小汽车和人工驾驶卡车分别为1.25 s、2.4 s。
根据表1,HC-C、HC-T、HC-A均属于人工驾驶小汽车的跟驰类型,对应的车头间距是S1、S2、S3。HT-C、HT-T、HT-A均属于人工驾驶卡车的跟驰类型,对应的车头间距是S4、S5、S6。人工车辆平衡态车头间距为

根据表1 中人工驾驶车辆跟驰类型的不同情况,选择不同的参数计算平衡态车头间距。
3.2 分析结果
根据第2节通用性推导以及3.1节设定的案例分析场景,在混合交通流卡车比例P1不同取值阶段下,以P1=0 为基准场景,P2=1 为对比场景,即从小汽车混合流层面,分析智能网联卡车相比传统人工驾驶卡车对混合流通行能力的提升作用。
式(13)计算案例分析中混合流随机态车辆转换系数ETP与车队规模、智能网联卡车比例的对比结果,分别如图3 和表2 所示。在图3 和表2 中,n为智能网联卡车车队的最大规模,其中n=1 表示智能网联卡车不组成车队,同时用n=0 表示基准场景,以方便对比分析。
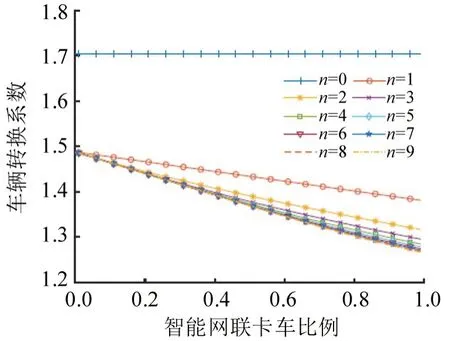
图3 随机态车辆转换系数曲线Fig.3 Passenger car equivalents under random state curve
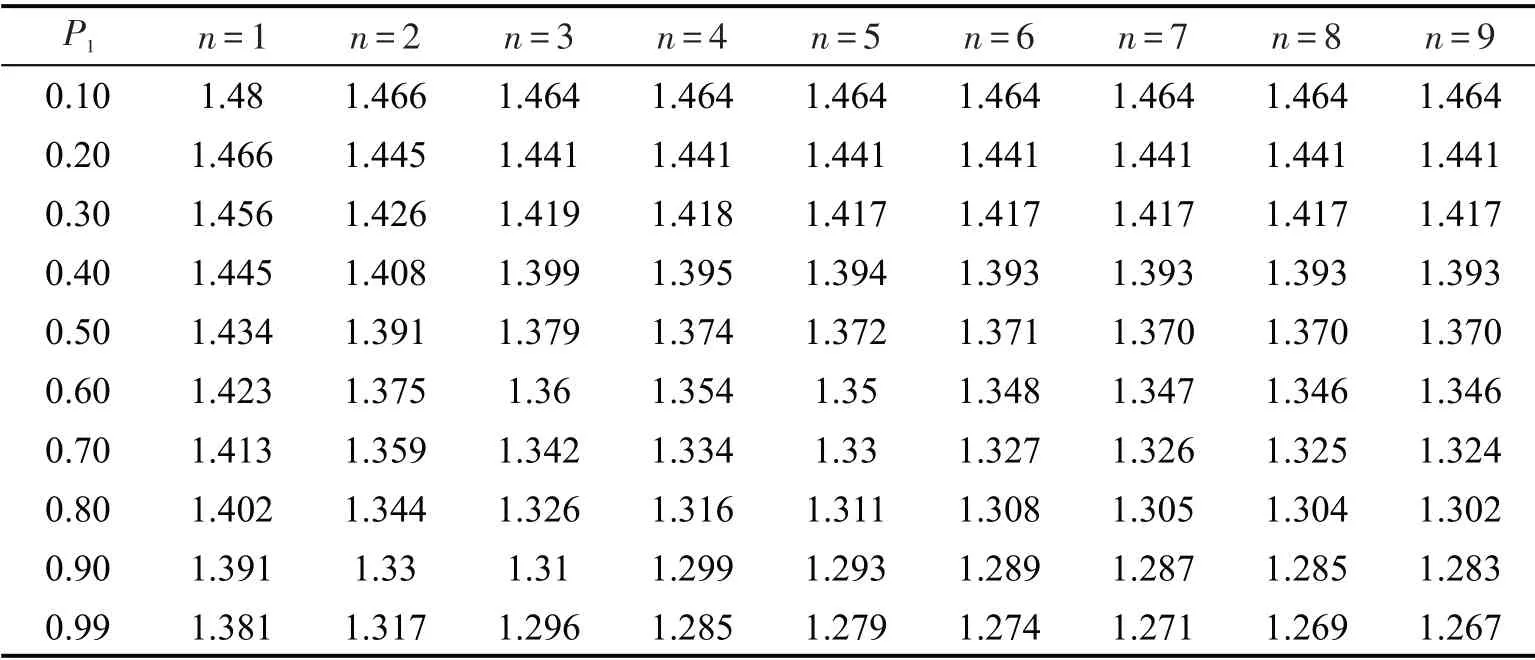
表2 不同n 和P1 值下ETP 计算结果Table 2 Calculation results of relative entropy under different n and P1
由图3 可知,针对基准场景而言,人工驾驶卡车比例增大对ETP没有影响,ETP值稳定在1.703。针对对比场景,ETP随智能网联卡车比例的增大而减小,随最大车队规模n的增大而减小,即智能网联卡车比例以及最大车队规模的增大,均有利于混合交通流通行能力的提升。同时,当智能网联卡车比例较小时不易形成车队,故车队规模在小比例的情况下对ETP的影响较小,而车队规模过大将增大车队控制的复杂程度[15],因此,需从通行能力提升层面分析并确定智能网联卡车最优车队规模。根据表2,在相同条件下,计算相比下一个n取值相比上一个n取值时,ETP的减小率,譬如,在智能网联车辆比例为0.5 取值条件下,计算n=3 比n=2 的ETP的减小率为0.86%,计算结果如表3所示。若以1%的ETP减小率为标准,即ETP减小率接近1%时,认为通行能力提升不再显著,根据表3的计算结果可得,随机态势车流的最优车队规模为2~4辆。
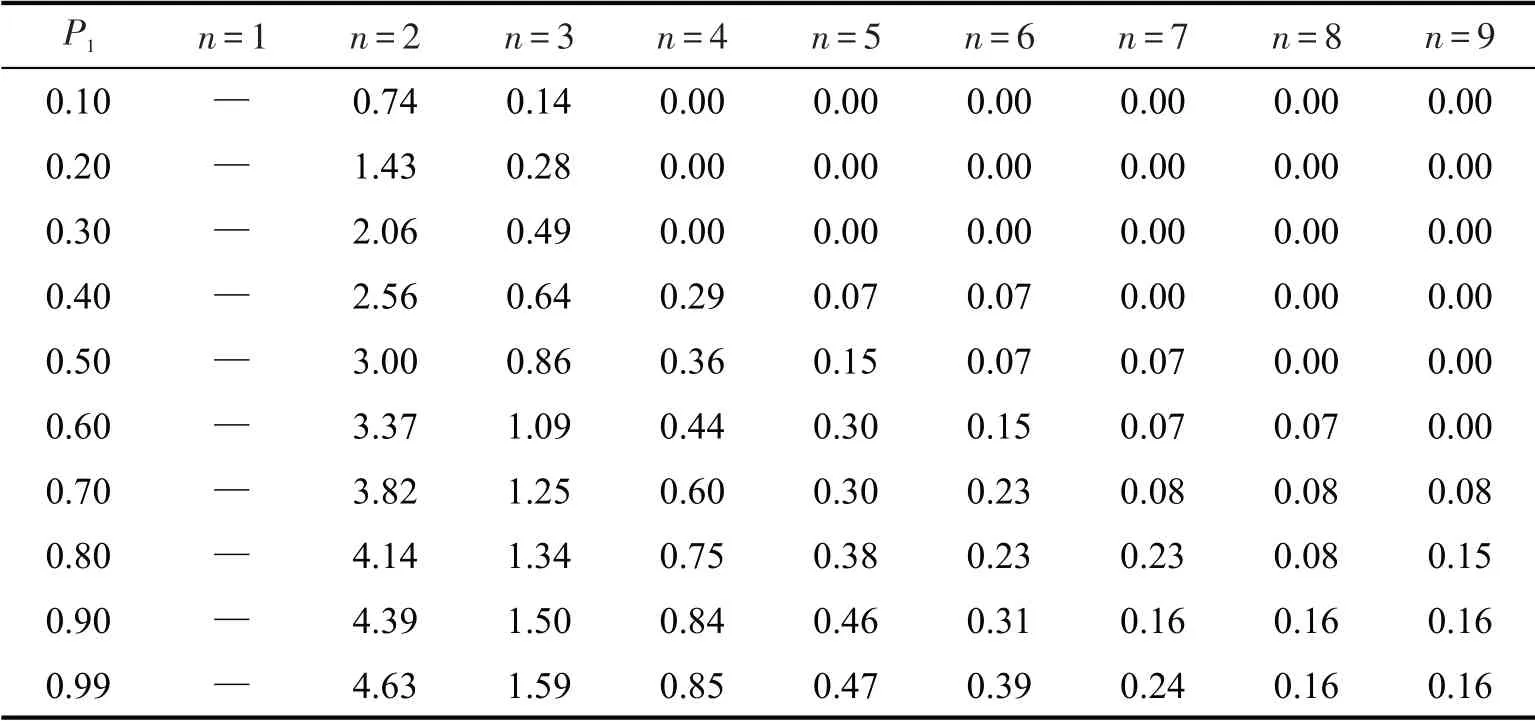
表3 不同n 和P1 值下ETP 减小率Table 3 Relative entropy reduction rate under different n and P1(%)
3.3 对比分析
根据2.3节推导的3种态势车流一般性分布特征,分别计算案例分析中混合流随机态、优势态和劣势态服从分布为
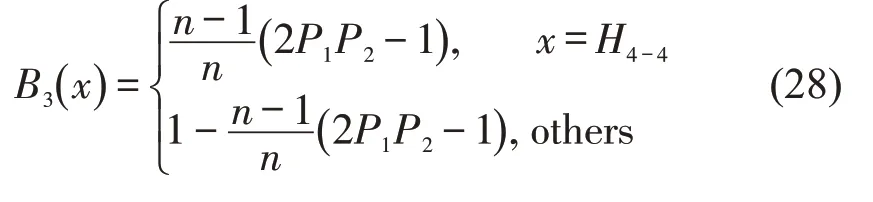
由式(26)~式(28)分别计算3种态势车流与理想车流的相对熵,结果如图4所示。
从图4 可知,3 种态势车流相对熵随车队规模增大、智能网联卡车比例提高而逐渐减小,当智能网联卡车未形成车队或劣势态的智能网联卡车比例小于0.5时,车流中均不存跟驰类型HF-A,故从智能网联卡车车队运营的角度,在此条件下研究劣势态的相对熵无实际意义。
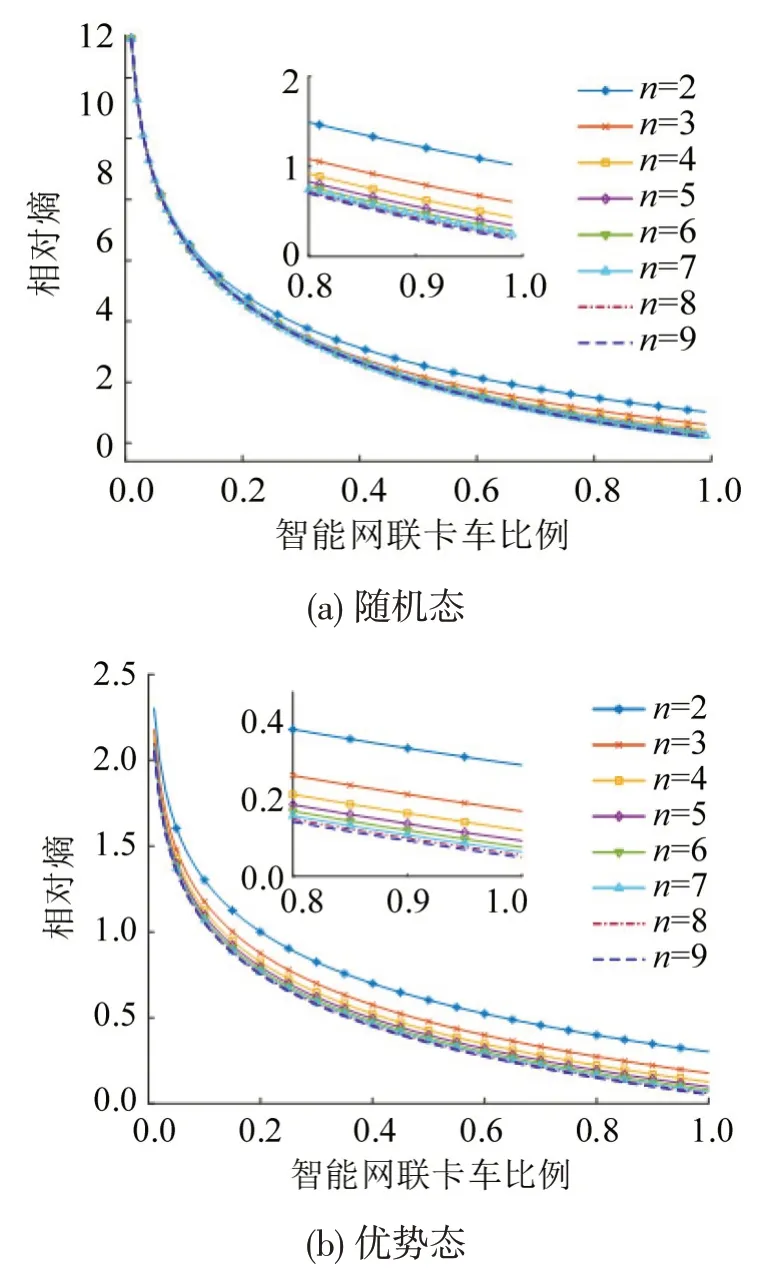
图4 相对熵曲线Fig.4 Relative entropy curve
在相同智能网联卡车比例条件下,优势态、随机态、劣势态的相对熵依次减小,由相对熵与车辆转换系数在表征通行能力方面的一致性可知,同等条件下,优势态、随机态、劣势态的通行能力依次减小,揭示了车流状态对混合流通行能力的积极影响作用,在管控智能网联卡车车队混合流时,引导随机态车流向优势态车流转变、抑制随机态车流向劣势态恶化,是提升混合流通行能力的潜在必要途径。
4 结论
(1)通过分析混有智能网联卡车车队的混合交通流运行机制,根据车辆在空间上的随机分布特性,构建了10种跟驰类型及其概率解析表达式,综合考虑混合交通流车辆转换系数和相对熵,提出适用于智能网联卡车比例、智能网联卡车车队最大规模以及不同混合流态势等条件的通行能力通用性分析方法,该方法可应用于未来智能网联卡车车队技术落地后对混合交通流的通行能力分析。
(2)案例分析结果表明,智能网联卡车比例和车队最大规模与通行能力成正相关关系,但最大车队规模对通行能力提升的显著性随着车队规模增大逐渐减小,得到随机态车流的最优车队规模为2~4辆。在相同车队最大规模和智能网联卡车比例的条件下,优势态车流、随机态车流、劣势态车流的相对熵依次减小,揭示了混合交通流的车流状态对通行能力具有不同影响作用,从而引导车流状态向优势流转变,以提升混合流通行能力。
(3)本文研究结果从混合交通流通行能力层面为未来物流园区以及港口干线运输等场景下智能网联卡车车队的运营管理提供分析方法支撑,未来智能网联卡车车队不可避免地将与其他车流进行交汇,提出合流与分流区的智能网联卡车车队通行能力控制策略显得十分必要,下一步将进行研究。
猜你喜欢
工会博览(2022年33期)2023-01-12 08:52:32
工业经济论坛(2020年6期)2020-04-13 00:38:20
扬子江(2019年3期)2019-05-24 14:23:10
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
西南交通大学学报(2016年3期)2016-06-15 20:29:35
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55
中国工程咨询(2016年1期)2016-02-14 06:47:44
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
数学教学通讯·初中版(2015年5期)2015-06-17 15:33:29