网联环境下基于多驾驶人风险评价的不良行为主动干预研究
2022-08-30 02:41:28鲍琼屈琦凯唐涵润陈建明沈永俊
交通运输系统工程与信息 2022年4期
鲍琼,屈琦凯,唐涵润,陈建明,沈永俊
(东南大学,交通学院,南京 211189)
0 引言
随着道路交通需求迅猛增长,交通安全问题日益突出,世界卫生组织在2018年的全球道路交通安全报告中指出,全世界每年有135万人因道路交通事故死亡,几千万人不同程度受伤[1]。驾驶人作为道路交通系统的主要控制者、调节者和信息决策者,一直以来都是道路交通安全的研究重点。常见的驾驶人不良操作行为,如超速、急加速、急减速、急打方向盘等,是导致翻车、追尾、车辆冲出路外等事故形态的主要原因。因此,有必要开展针对驾驶人不良行为的综合评价与主动干预研究。客观评价不良驾驶行为并应用评价结果进行针对性干预,研究成果可用于不良驾驶行为的监控预警驾驶人行为推荐系统的研发等多个方面[2]。
近年来,许多学者通过采集驾驶人行车数据,提炼出不良驾驶行为的关键指标,进而对驾驶风险进行评价[3]。Jun 等[4]利用GPS (Global Positioning System)、OBD(On Board Diagnostics)等车载设备采集驾驶人的速度、加速度、减速度数据,分析不良驾驶行为与事故风险的关系,研究发现,驾驶人在速度、加速度和减速度方面的表现均与事故参与程度有关。Li 等[5]使用手机传感器采集驾驶人行车数据,基于阈值法进行急加减速、急转弯、驾驶过程中使用手机、频繁换道等4 种不良驾驶行为的辨识。Ellison 等[6]基于不安全行车事件发生前的车辆速度、加速度、减速度等时空指标的最大值、平均值、最小值、标准差等数据,构建多层次的风险模型,对超速、急加速、急减速等不良驾驶行为进行风险打分,最终得到驾驶人综合安全评分。Castignani等[7]通过手机传感器采集驾驶人在一段路程内的行车数据,基于模糊系统辨识不良驾驶行为(包括超速、急加速、急减速),然后根据不良驾驶行为的发生频次对驾驶人的驾驶表现进行打分。综上所述,大部分研究都使用速度、加速度、减速度这3 个指标辨识不良驾驶行为,但在安全性评价中多以不良驾驶行为出现的频次为依据。
智能网联交通系统的提出为驾驶人行为主动干预提供了新的发展方向。Farah等[12]利用路侧智能设备与车载设备通信技术,指出车路互联能够优化车辆跟驰行为中的加减速幅度。Li 等[13]建立车路协同系统,利用车车通信进行车辆轨迹预测,通过事故检测算法实时估计车辆可能存在的危险状态。Payre 等[14]借助驾驶模拟器,以手机为载体实现驾驶行为网联干预功能,如紧急刹车灯、紧急车辆警告、交通状况警告等,通过对比干预前后驾驶人行为变化,评估了网联干预方法的有效性和可接受性。Hong 等[15]利用虚拟仿真平台模拟智能网联交通环境,构建驾驶人行为推荐系统模型,向危险驾驶人离线推荐安全驾驶行为,仿真结果表明,所提出的系统可使整体交通安全效能有所提升。Hussai 等[16]基于车联网和车路协同状态,根据驾驶人的行驶速度等特征分别对居民区视线不足的交叉口和路段行人过街进行预警,提示形式包括仪表盘显示和车内屏幕闪动等,结果表明该方法在很大程度上避免了碰撞事件的发生。
综上,针对驾驶人不良行为综合评价及在此基础上的主动干预方法,国内外学者开展了大量研究,但仍存在以下问题与不足。首先,针对单个不良驾驶行为分析,目前大多数研究仅考虑不良驾驶行为出现的频次,忽略了其持续时间及幅值;其次,针对多种不良驾驶行为的综合评价,现有方法包含较强的主观成分,客观的综合评价模型还比较欠缺;最后,在智能网联环境下研究车辆主动安全控制问题总体上仍处于起步阶段,且鲜有探讨基于多驾驶人不良驾驶行为综合评价的主动干预策略与方法。
为解决现有问题,本文提出一种网联环境下基于多驾驶人风险评价的不良行为主动干预框架体系。首先根据阈值法判定场景中多驾驶人的各类不良驾驶行为;利用面积法实现对不良驾驶行为发生频次、持续时间以及幅值的综合计算,并利用可变权重构建其与事故风险的关联关系;借鉴数据包络分析思想,提出考虑可变权重的不良驾驶行为综合评价模型;通过微观仿真模拟智能网联交通环境,提出基于多驾驶人风险评价的不良行为主动干预方法,探讨基于累加窗口和滑动窗口的干预方式,每种方式均实现干预单车与干预多车两种策略,并分析窗体大小、驾驶人接受率、干预车辆数等对干预结果的影响。
1 不良驾驶行为判定
不良驾驶行为会产生事故风险,不同驾驶行为造成的事故风险又有所不同。在判定不良驾驶行为时,常用方法即为阈值法。在现实生活中,常见的驾驶人不良行为包括超速、急加速、急减速等。本文将车速和加速度超过一定阈值的车辆行驶状态定义为风险行车状态。同时,在识别特定的不良驾驶行为时,其不同幅值的风险程度也应被考虑,例如超速10%和50%所带来的事故风险应该是不同的。许多学者基于速度管理对速度与事故风险的关系进行研究。其中,较为权威的是Kloeden 等于1997年在澳大利亚进行的超速风险研究,该研究提出速度与事故风险的定量关系[17]。
急加速与急减速均会影响车辆行驶平顺性,导致车速在短时间内发生明显变化,进而引发碰撞、追尾等事故。其中,急减速行为不但容易导致追尾事故,还会加剧车辆零部件的磨损,进而影响车辆的制动性能甚至造成制动失效。本文在相关文献基础上选取急加速的基本阈值为3 m·s-2、急减速的基本阈值为2 m·s-2[18]。
2 不良驾驶行为综合评价模型构建
2.1 数据包络分析
数据包络分析方法(Data Envelopment Analysis,DEA)以决策单元(Decision Making Units,DMU)输入、输出指标的权重系数作为变量,借助数学规划和统计数据确定相对有效的生产前沿面,将各决策单元投影到DEA 的生产前沿面上,通过比较决策单元偏离前沿面的程度综合评价它们的相对有效性[19]。其中,最为典型的是CCR(Charnes-Cooper-Rhodes)模型。假设有n个决策单元,每个决策单元D有m种输入和s种输出,xij、yrj分别为第j个决策单元的第i种输入、第r种输出,vi为第i种输入的权重,ur为第r种输出的权重。决策单元Dj的效率hj为总加权输出与总加权输入的比值,则第j0个决策单元相对于其他决策单元的效率为
自MOOC诞生以来,全球掀起了MOOC热,涌现了享有 “国际在线教育三架马车”之称的Coursera,Udacity和Edx三大免费网络教育平台,纽约时报称2012年为国际MOOC元年。在此教育改革浪潮下,我国高等院校也顺应潮流,加快数字化教学资源的共建共享。当前,很多高校管理人员观念没有更新,对MOOC理念下的教育教改认识不深,对高校数字化教学资源的开发与应用重视程度不足,有的院校虽已将数字化教学资源开发与应用列于教育教改规划,但在人力、物力、财力方面的投入远远不够,在英语教育教改方面的投入更是甚微,这在很大程度上阻碍了英语数字化教学资源共建共享的进程。
在输入不变情况下,式(1)和式(2)可简化为
该模型中,每个决策单元的输入都被赋予统一的值。此时,若将n个决策单元结合s个输出特征进行评价,其目标值越高则表示性能越好,最佳决策单元是得分为1(基准值)的决策单元。
DEA方法具有以下特点:首先,决策单元D的最优得分与输入/输出的量纲无关,建模前无需对原始数据进行标准化处理;其次,权重由模型计算得到,在建模过程中无需权重值假设,因此排除了很多主观因素;最后,该方法通过与其他所有D比较来评价某一特定D,其得分是根据所观测到的最佳性能衡量的,故每一个D在任何其他可行加权方法中都不可能得到更优的得分。
然而,在使用DEA方法求解时,每个D会去选择对它自己最有利的权重,因此每个D的权重分配各不相同,无法针对所有D进行统一排序。本文采用交叉指数法[20]解决此问题。当使用交叉指数法评价某D时,将使用所有D的最佳权重,在评价过程中,可将各D的评价结果汇总到交叉指数矩阵中,如表1所示。第i行第j列的元素表示Dj使用Dj的最优权重后所获得的评价得分。通过将交叉指数矩阵中的每一列取均值,得到每个D的交叉指数得分。此时,所有D都基于相同的加权权重集进行评价,可以实现相互比较和排序。
表1 交叉指数矩阵Table 1 Cross index matrix
2.2 考虑可变权重的不良驾驶行为综合评价
为了客观评价各种不良驾驶行为对评价结果的贡献,本文借鉴数据包络分析的核心思想开展针对多驾驶人的不良行为相对风险评价研究。对于不同的不良驾驶行为,在对其进行风险评价时除考虑其出现频次,每次不良驾驶行为持续的时间以及幅值也应纳入考量。理论上,可以将超过基本阈值的每个数值幅度都作为单独的阈值来看待。实际操作中,可以对每种不良驾驶行为的幅值进行等级划分,针对每个阈值等级均设置严重性权重Wfg,其中,f表示各种不良驾驶行为(f=1,2,…,p;p为种类数),g表示不良驾驶行为幅值的等级数(g=1,2,…,q;q为等级数),从而建立单位时间内超过基本阈值的行为数据与行为风险之间的联系。具体过程如图1所示。
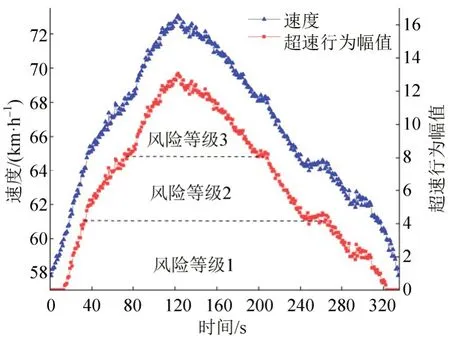
图1 速度/幅值-面积图(限速60 km·h-1)Fig.1 Speed/amplitude area diagram(speed limit 60 km·h-1)
首先,在单位时间内,计算每种不良驾驶行为的幅值,利用聚类分析划定其等级[21]。其次,采用面积法,将不良驾驶行为持续时间内所属阈值等级的各幅值分别进行累加,并利用严重性权重Wfg,得到各种不良驾驶行为的总风险。以速度为例,假设某一超速行为幅值的等级数为3,面积法示意图如图1所示。可见,这一过程在考虑不良驾驶行为出现频次的基础上,同时考虑了每次不良行为的持续时间及其幅值。最后,基于出行距离对总风险进行标准化,得到单位距离风险。为综合评价各种不良驾驶行为,还需考虑每种不良行为对评价结果的贡献权重。因此,另取权重变量v1,v2,…,vp表示第1,2,…,p种不良驾驶行为的加权权重。
将各种不良驾驶行为的单位距离风险作为模型输入,不良驾驶行为得分作为模型输出,借鉴数据包络分析思想,模型目标函数为最小化驾驶人的不良行为综合得分。模型的约束条件为:所有驾驶人的得分应不低于基准值1,得分为1 的驾驶人是相对最安全的驾驶人;权重变量v应大于等于0。据此,基于数据包络分析的不良驾驶行为综合评价模型为
式中:xfgj为第j个驾驶人第f种不良行为第g类幅值等级的面积累积总和;vf为第f种危险驾驶行为的加权权重;rj0为第j0位驾驶人的得分。模型中第2个约束条件反应了严重性权重变量wfg之间的关联关系,即超出基本阈值的程度越大,对应的严重性权重变量值应越大。
显然,式(5)为非线性模型,通过引入一个新变量Ufg,令Ufg=vf·Wfg,可将其变换为线性模型,进而方便求解,最终模型为
在此基础上,根据表1计算各驾驶人的交叉指数得分,并以此作为每个驾驶人不良行为评价的综合得分。得分越低,表示驾驶人的行车安全性越好。
3 基于多驾驶人风险评价的不良驾驶行为主动干预
在智能网联环境下,通过车载终端系统可以实时获取同一场景中不同驾驶人的行为数据,并针对所辨识的各种不良驾驶行为开展驾驶人相对风险评价,得到各位驾驶人的风险等级,以此为基础,针对风险驾驶人生成不同的主动干预方案,并及时发布到车载终端系统,从而实现与驾驶人的信息交互,保障驾驶人的行车安全。本文利用微观仿真模拟智能网联交通环境,探讨基于多驾驶人风险评价的不良驾驶行为主动干预方法。
3.1 仿真实验设计
本文基于SUMO(Simulation of Urban Mobility)和Python 联合仿真平台进行仿真实验,在SUMO软件中,搭建单车道直行路段仿真场景,如图2 所示。其中,路段限速设为80 km·h-1,路段长度设为14 km,仿真总时长设为600 s。在仿真中,生成10辆小车,但本文只考虑处于跟驰状态的9辆车(编号为ID1~9)。小车车身长度设为5 m,所有车辆都从最左侧的路段起点开始行驶,初始速度均为0 m·s-1,车辆跟驰模型选用智能驾驶人模型(Intelligent Driver Model,IDM),进而模拟一列车队起步,后车跟随前车行驶。在Python 界面中,通过Traci 接口连接SUMO实现交互,实时获得车辆的编号、速度、加速度、位置等信息。在仿真中,若需要对某一车辆施加干预,可通过Traci 接口将相应参数传递给车辆。为模拟实际交通场景中的不良驾驶行为,本文在SUMO 仿真配置文件中设置车辆最大速度为120 km·h-1,车辆最大加速度和最大减速度均为4 m·s-2,以确保车辆可以随机出现不良驾驶行为。
图2 单车道仿真场景Fig.2 A single lane simulation scenario
3.2 驾驶干预仿真方法
在网联环境下,通过构建驾驶行为数据云平台可以为每个驾驶人建立行驶数据档案。通过评价驾驶人在上一时间段的驾驶表现,确定其在下一时间段需要被干预的驾驶行为。使用基于数据包络分析的不良驾驶行为综合评价方法,可以实时判断驾驶人的驾驶表现。但要实现对驾驶人的主动干预,还需要考虑以下3个因素:干预间隔时间,每次行为评价所使用的数据量,以及每次干预的车辆数。
首先,干预方法需在一定的干预间隔内实施。干预间隔过短,容易导致干预信息的频繁变更;反之,干预间隔过长,容易导致干预无效。
其次,在每次干预前,都需要提取驾驶人的历史数据进行不良驾驶行为综合评价,以辨识场景中的危险驾驶人。若使用历史数据过少,可能导致干预类型的确定出现偏差;反之,若使用历史数据过多,冗余信息不仅会影响干预类型的确定,还会降低实时计算速度。
最后,在模拟仿真中对危险车辆进行干预时,需要明确每次干预的车辆数。每次干预一辆车和每次干预多辆车所产生的结果必然存在差别。
基于以上考虑,本文预设干预间隔为60 s,以时间窗方式抽取数据,即单个窗口大小为60 s,采用基于累加窗口和基于滑动窗口两种干预方式。针对干预车辆数,考虑干预最具风险性车辆(单车)和干预所有风险性车辆(多车)两种策略。
在仿真过程中,考虑的不良驾驶行为包括超速、急加速、急减速,使用基于数据包络分析的不良驾驶行为综合评价方法辨识风险车辆。针对被干预的车辆,根据其不良驾驶行为类型,设置行驶参数进行干预。针对超速车辆,设置其允许的最大速度为路段限速;针对急加速车辆,设置其允许的最大加速度为3 m·s-2;针对急减速车辆,设置其允许的最大减速度为2 m·s-2。针对干预参数组合设定,通过SUMO仿真后台的XML配置文件来完成。通过实时给定每种干预类型的行驶参数,实现针对车辆驾驶人个体的干预。
3.3 驾驶干预仿真实验
基于累加窗口的干预方式,是指干预间隔为60 s,窗口大小不断扩充,使用当前所有历史行车数据辨识风险驾驶人,进而实施干预,其干预流程如图3(a)所示。基于滑动窗口的干预方式,是指干预间隔为60 s,窗口随时间移动且大小保持不变,使用最近固定时间长度的历史行车数据辨识风险驾驶人,进而实施干预。本文实现的窗体大小有以下几种:60 s(单个窗口)、120 s(2个窗口)、180 s(3个窗口)、240 s(4 个窗口)、300 s(5 个窗口),分别命名为方案1~方案5。其干预流程如图3(b)所示。
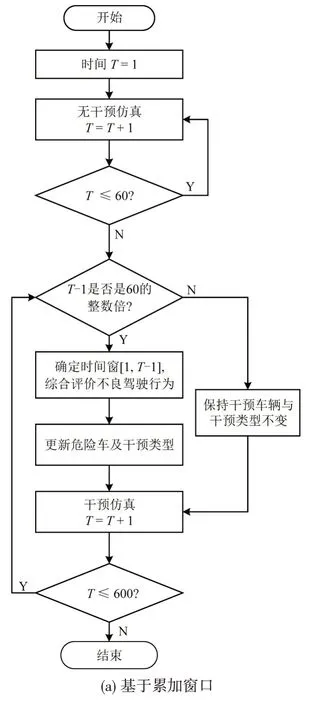

图3 驾驶干预仿真流程图Fig.3 Flow chart of driving intervention simulation
3.4 干预仿真结果分析
针对无干预和基于累加窗口的单车干预与多车干预这3种情况,9辆车的驾驶人在600 s内的不良行为总得分如图4(a)所示,各车驾驶人的不良行为综合得分如图4(b)所示。与无干预情况相比,在干预多车策略下,车辆的不良驾驶行为总得分下降了22.80%。而在干预单车策略下,绝大部分车辆的不良驾驶行为综合得分均增加,3 号车尤为明显。分析仿真数据发现,在干预单车策略下,3号车频繁超速与急减速,最终得分较高,其原因在于车队起步初期,前车会加速行驶达到期望速度,针对前车的干预影响到了3 号车,3 号车为与前车保持合理的间距,会出现急加急减等行为,进而导致速度变化较大。
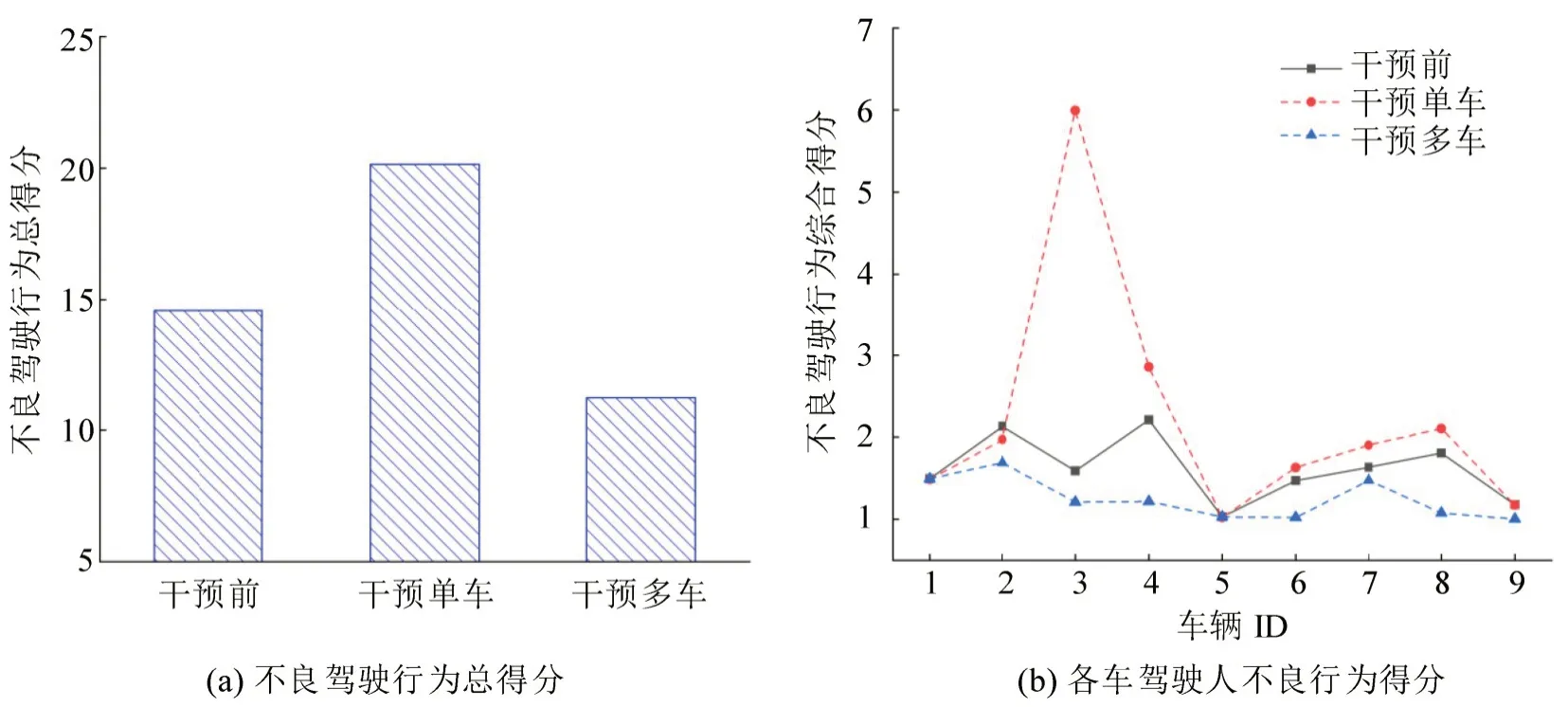
图4 干预前后不良驾驶行为得分(累加窗口方式)Fig.4 Score of risky driving behavior before and after intervention(cumulative window approach)
可见,在干预单车时,只干预不良行为得分最高的风险车辆,会忽视对其他车辆的调控,即使其他车辆得分也较高。在干预多车时,只要车辆出现过某种不良驾驶行为,那么在仿真中便一直针对该不良行为进行干预,车辆的行为风险不会持续增加。
基于累加窗口的干预方式,因历史数据的使用会随着时间的增加而不断累加,这不仅会造成数据冗余,增加计算时间,还无法准确反映驾驶人的实时驾驶状态。因此,该方法更适合针对驾驶人的事后干预,即通过分析个体驾驶人的所有历史行车数据,挖掘他们的驾驶风格,从而提出改善其驾驶行为的建议。
针对无干预和基于滑动窗口的单车干预与多车干预这3种情况,9辆车的驾驶人在600 s内的不良行为总得分如图5所示。与无干预情况相比,在干预多车的方案4 与方案5 中,车辆驾驶人的不良行为总得分分别下降了4.28%和10.50%。针对其他方案,不良驾驶行为总得分有所增加。可见,干预多车的后两种方案更优。
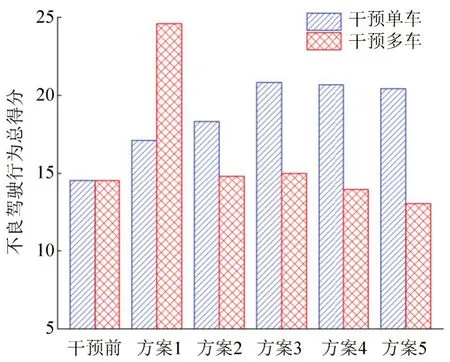
图5 干预前后不良驾驶行为总得分(滑动窗口方式)Fig.5 Total score of risky driving behavior before and after intervention(sliding window approach)
在干预单车/多车策略下,各车驾驶人的不良行为综合得分如图6(a)和图6(b)所示。分析仿真数据发现,3 号车同样出现了频繁超速与急减速。随着仿真进行,各车在窗口时间内不断累积行为风险。
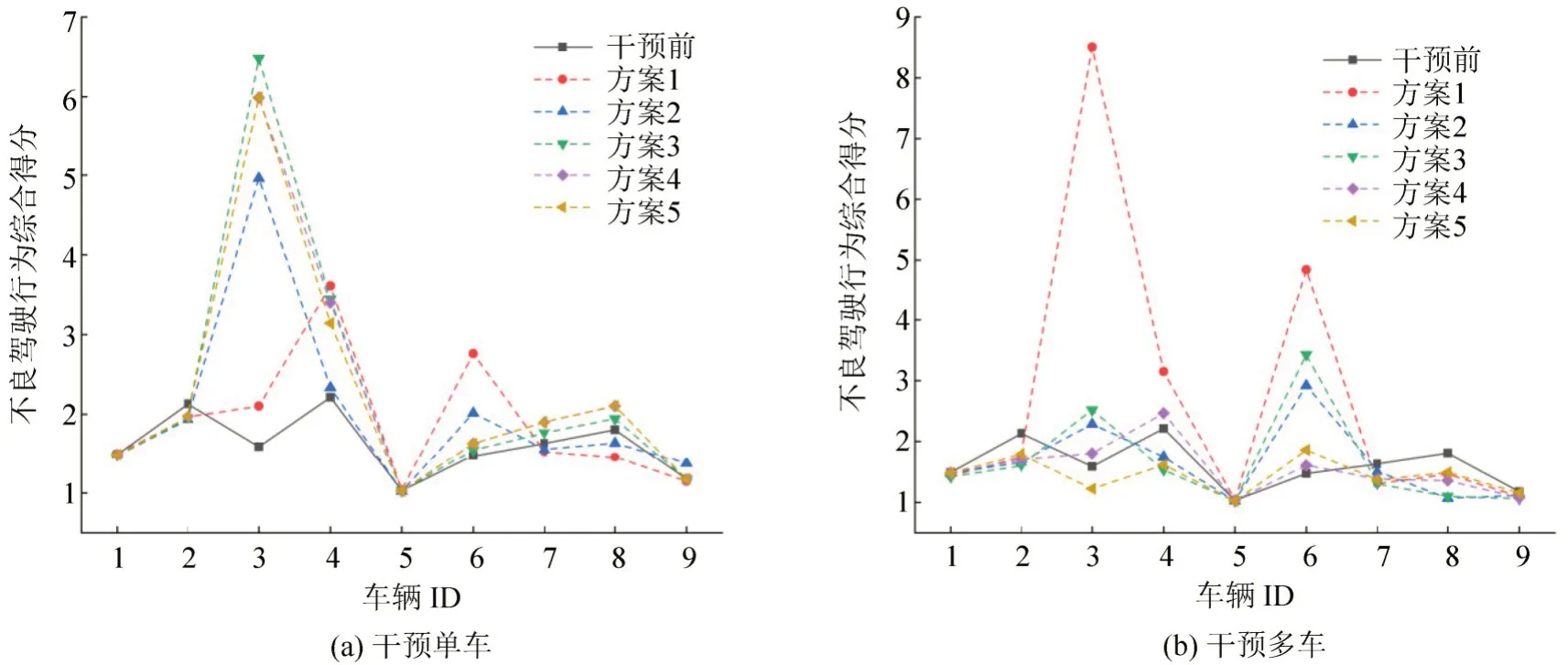
图6 干预前后各车驾驶人不良行为得分(滑动窗口)Fig.6 Score of risky driving behavior of each vehicle before and after intervention(sliding window approach)
在干预单车策略下,随着窗口增大,3号车的得分有不同程度上升,而6 号车的得分却有所降低。其原因在于3 号车并非一开始就出现不良驾驶行为。车队起步初期,排列靠前的车辆仍是干预重点,它们会影响到3 号车。随着窗口增大,对前车的干预时间会增加,导致3号车出现不良驾驶行为时仍无法被及时干预,只能再等待一个干预间隔。在此过程中,3 号车的风险持续累积。当窗口较小时,风险车辆频繁更新,针对前车的干预引起6 号车的不良驾驶行为,其在窗口内的风险累积会超过3号车;当窗口较大时,3号车在仿真后期成为干预重点,但该策略忽视了对后车的调控,导致后车得分也有小幅度增加。
在干预多车策略下,窗口时间内出现过不良驾驶行为的所有车辆均是干预对象。随着仿真进行,窗口不断滑动,各车在窗口内出现不良驾驶行为会不断更新。车辆之间存在相互影响的关系,对多个风险车辆同时施加干预必然会影响到周围的正常车辆。当窗口较小时,每次行为评价所使用的数据量也较少,风险车辆会频繁更新,这不仅会影响到更多的周围车辆,而且针对某特定风险车的不良行为确定及干预时间均受到限制,进而导致干预效果不佳。随着窗口增大,风险车辆的更新频率降低,不仅更加容易找出某些特定的风险车辆及其不良行为,而且会增加对风险车辆的防控时长。从图5可以看出,当仿真时长为600 s 且干预多车时,方案5的效果最好,这也说明窗体大小会对干预结果产生影响。
基于滑动窗口的干预方法,将使用窗口时间内的行车数据,随着时间推移,窗口不断往前滑动,不断进行数据更新。这种方法在仿真中的表现不如基于累加窗口的方法,即该方法的车辆总得分降低率更小,但该方法在现实中的可行性更高,具有一定的应用前景。在现实中应用该方法可以进行近实时干预,因为窗口中的数据是近期的行车数据,每次行为评价将使用近期行车数据,可以结合驾驶人实时行为,反映当前驾驶状态,通过不良驾驶行为综合评价,找到风险驾驶人并实现近实时干预。
在以上仿真实验中,各驾驶人均按照给定的干预方案驾驶车辆,即驾驶人接受率均为100%。但在现实中,驾驶人不一定完全接受干预方案。因此,针对方案5 的多车干预,再进行多次仿真实验。在每次干预时,随机抽取50%的危险车辆驾驶人接受干预,其余驾驶人不接受干预,得到如图7所示的仿真结果。从图7可以看出,针对多次仿真实验,车辆驾驶人的不良行为总得分存在差异。与干预前相比,当干预接受率为50%且车辆总得分降低时,降低率可达9.30%;当干预接受率为50%且车辆总得分增加时,增加率可达11.43%。可见,当接受率相同时,干预的车辆不同,造成的干预效果会有所不同。
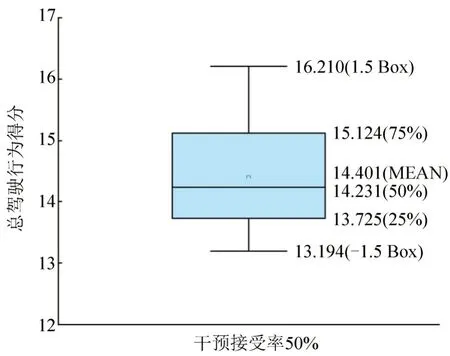
图7 干预接受率50%的多次仿真结果Fig.7 Multiple simulation results of 50%intervention acceptance rate
如图8 所示,从多次仿真实验的平均结果来看:与干预前相比,当干预接受率为50%时,车辆的不良驾驶行为总得分降低且安全性有所提升;与干预接受率为100%相比,当接受率为50%时,车辆的不良驾驶行为总得分会增加10.60%。可见,针对相同的干预方法,驾驶人接受率会对干预结果产生影响。
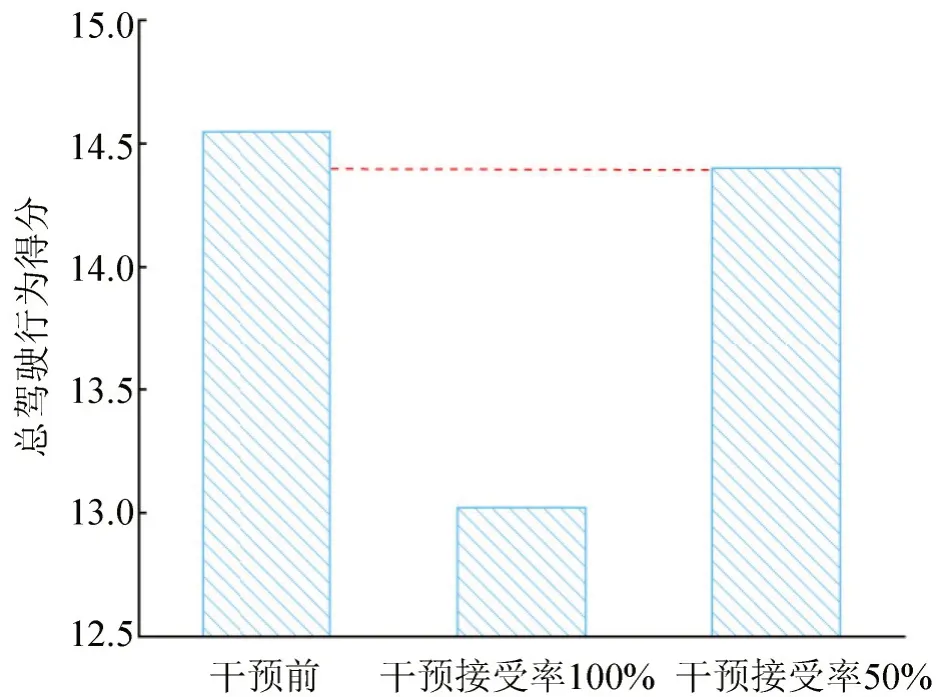
图8 不同干预接受率干预前后不良驾驶行为总得分Fig.8 Total score of risky driving behavior based on different acceptance rates
4 结论
本文提出了一种智能网联环境下基于多驾驶人不良行为综合评价的主动干预框架。具体结论如下:
(1)基于数据包络分析思想,同时考虑不良驾驶行为的发生频次、持续时间以及幅值,提出不良驾驶行为综合评价建模方法,以驾驶人的相对风险代替传统的绝对风险。通过引入严重性权重这一变量,表征行为数据超出基本阈值的程度,超出阈值越大,权重变量就越大,对应的风险亦越大,从而在技术层面解决了使用常量风险系数对不良驾驶行为进行风险量化的难题。本文针对不良驾驶行为的综合评价仅以超速、急加速、急减速为例进行分析,但本文提出的评价方法也同样适用于其他不良驾驶行为,可在采集相关数据完善不良驾驶行为表征指标体系的基础上直接引入所构建的模型。
(2)利用SUMO和Python联合搭建智能网联环境下的驾驶仿真平台,通过考虑可变权重的不良驾驶行为综合评价方法辨识危险驾驶人,提出基于累加窗口与滑动窗口的主动干预方法;针对每种方法,均实现干预单车(时间窗内相对最危险车辆)与干预多车(时间窗内所有危险车辆)两种策略。仿真结果表明,无论何种干预方法,干预多车策略均取得较好的效果;而与基于累加窗口的干预方法相比,基于滑动窗口的干预方法在现实中的可行性更高,更适合实际应用;针对相同的干预方法,驾驶人接受率会对干预结果产生影响。
猜你喜欢
当代陕西(2020年17期)2020-10-28 08:18:18
人大建设(2018年5期)2018-08-16 07:09:00
车迷(2018年11期)2018-07-16 00:36:38
汽车之友(2018年12期)2018-06-27 17:57:34
汽车之友(2017年22期)2017-11-23 09:04:35
电信科学(2017年6期)2017-07-01 15:44:57
电子制作(2017年7期)2017-06-05 09:36:13
电测与仪表(2016年15期)2016-04-12 00:30:52
电源技术(2015年5期)2015-08-22 11:18:30
电测与仪表(2015年7期)2015-04-09 11:40:10