
基于MBD的三维装配工艺规划系统的研究与应用*
2022-08-30 09:43:00曾芬芳杜坤鹏王华昌
制造技术与机床 2022年9期
曾芬芳 杜坤鹏 王华昌
(①汉开目信息技术股份有限公司,湖北 武汉 430000;②西安飞机工业(集团)有限责任公司,陕西 西安 710000;③华中科技大学,湖北 武汉 430073)
基于MBD的三维装配工艺规划,将装配工艺以三维动画的形式,辅以音频和文字,直观生动地表达装配过程和装配要求,工人容易理解,对提高装配质量和效率非常有效;另一方面,工艺人员能充分利用MDB模型中的信息,快速、准确地完成装配工艺设计,提高工艺设计的效率和质量。
近年来基于MBD技术的装配工艺研究取得了一定成果,包括研究了基于MBD的三维装配信息模型[1],将制造信息和设计信息共同定义到产品的三维数字化模型中[2],利用MBD技术进行了知识化的工艺设计方法的研究[3],以及以同步建模技术为基础的逆向建模为核心,研究了三维设计模型向三维工艺模型的衍化方法[4];在三维装配工艺应用方面,研究了基于MBD的装配工艺数据集定义、装配工艺规划以及装配工艺协同设计的具体方法和流程、基于轻量化模型的装配过程可视化技术、以及子装配体识别算法等[5,6-8],提出了基于装配单元划分的装配工艺规划设计流程[9],以及利用CATIA二次开发技术开发了基于MBD的装配工艺协同设计系统[10]。本文在上述各领域研究的基础上,以提高三维装配工艺规划的质量和效率为目标,采用“拆卸定义装配”的方式来研究三维装配工艺过程规划技术,并基于MBD的三维装配工艺系统。
1 基于MBD的三维装配工艺关键技术研究
基于MBD模型的装配工艺设计的过程首先是进行产品装配过程规划,定义装配工序,并为工序分配装入件;再定义工步,为工步分配装入件,并详细描述零件的装入过程,包括移动的方向、起点和终点;旋转的方向、转数等,最终形成完整的装配工艺,后续用来进行装配仿真、干涉检查,以及指导操作工人。为提高三维装配工艺规划的质量和效率,本文研究了两个关键技术:装配信息建模、装配活动规划。
1.1 基于 MBD 的装配信息建模
研究MBD技术可知,产品MBD模型中包含管理信息、几何信息和非几何信息等,其关系如图1所示。其中管理信息包括零件名称、代号和材料等基本属性信息;几何信息包括几何体素,以及体素的类型、标识、定位数据和定形数据等信息,其中几何体素由MBD模型中设计模型的底层数据的点、线、面等几何元素构成;非几何信息是MBD模型上的标注信息,包括技术要求、尺寸、粗糙度和几何精度等信息。
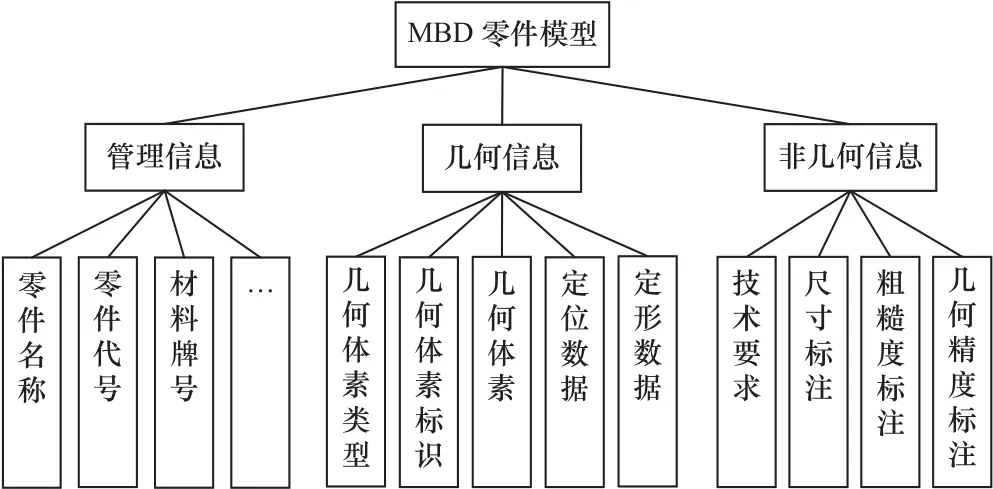
图1 基于 MBD 的模型信息
装配工艺是描述如何将一个个零件按一定的顺序、使用合适的工装工具组装成部件,再由部件按顺序组装成产品的过程,由此可知,装配结构中的最小单元为零件P,它不仅包含几何信息,还包含管理信息和非几何信息,零件信息P可以表示为

其中:PID是零件的ID,GA为零件的几何信息,MA为零件的管理信息,SA为零件的标注信息。基于MBD的产品装配信息AI可用公式可以表示为
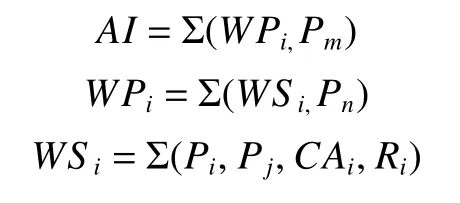
其中:WS为工步,P为零件,CA为工艺属性,R为零件间的拓扑关系,WP为工序,AI为产品装配。CA工艺属性用于描述零件的加工要求,可根据关联标注信息获得,CA分为公共工艺属性和私有工艺属性。公共工艺属性是从零件模型上继承过来的,主要包括材料、毛坯类型和技术要求等;私有工艺属性主要包含加工基准、加工尺寸、加工精度、表面粗糙度和几何精度等。
基于上述逻辑,装配基本单元为零件,装配工艺信息按产品、工序、工步和零件4层树状模型(PPSP模型)来表达,如图2所示。PPSP模型结构顶层为产品(Product)、第二层为工序(Work Process)、第三层为工步(Work Step)和最后一层为零件(Part),产品装配过程包括一或多个工序,还可以有零件装配而成;而工序由一个或多个工步,还可以包括零件装配而成;工步由一个或多个零件装配而成。
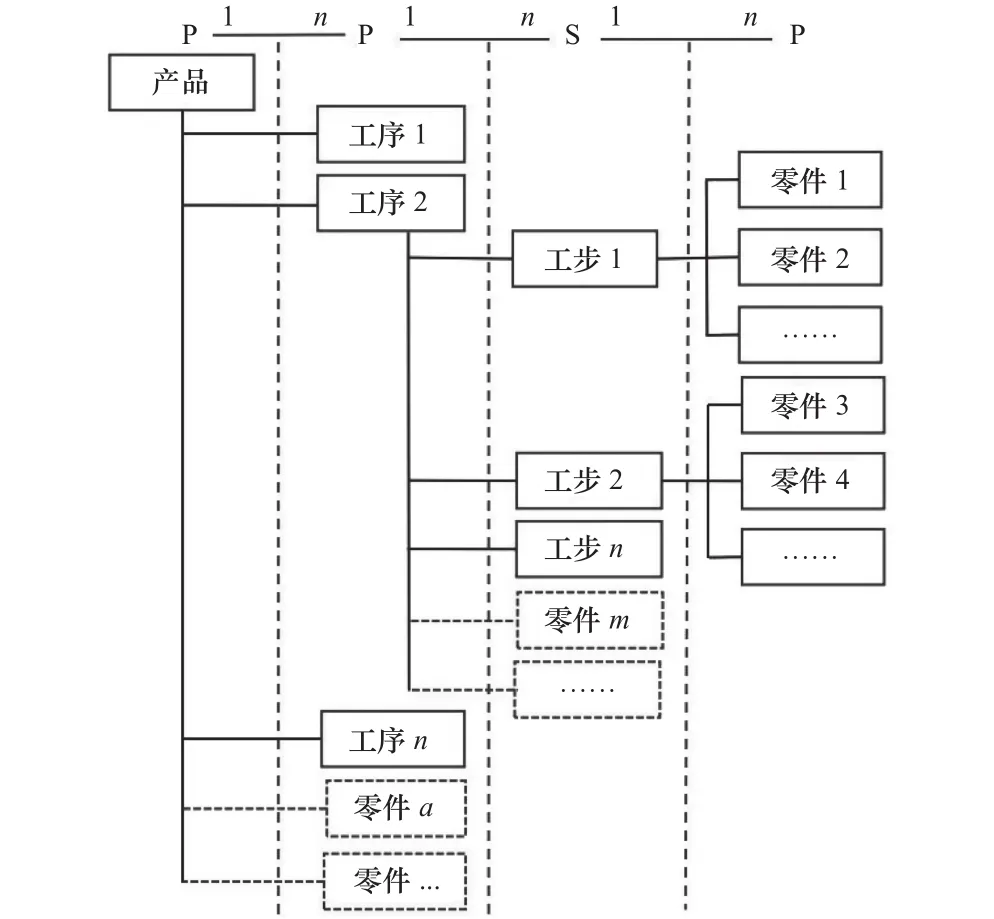
图2 装配工艺信息模型(PPSP 模型)
1.2 用“拆卸定义装配”的方式来规划装配活动
人们搭积木都有这种体验,将一座已搭好的房子拆散比将一堆积木搭成房子要快得多、容易得多。“拆卸定义装配”就是利用拆比装容易这一特点来定义产品装配过程:产品设计者提供给工艺人员的是一个已装好的产品模型,基于此模型,一步步将零件或部件从产品上拆下来,并记录拆卸步骤和参数;拆卸的逆过程即为装配过程。
1.2.1 拆卸活动的定义
经过分析和研究,产品的拆卸活动分可以归纳为以下几类基本运动:直线运动、螺旋运动、径向运动、平动运动、旋转运动、牵引运动和周向运动等。由于篇幅原因,本文以直线运动和螺旋运动来阐述“拆卸定义装配”原理。
直 线 运 动 由 起点S(XA,YA,ZA)和 终 点E(XB,YB,ZB)来定义,螺旋运动R(Rotate)由旋向Dir(左旋或右旋)和旋转圈数Ang定义。
基于PPSP模型,产品拆卸活动流程如图3,在拆卸过程中用拆卸活动记录表来记录所有拆卸活动,记录的顺序同拆卸活动的先后顺序一致。图中Tj(j,Pi,Sj,Ej)表示在拆卸活动记录表中增加一条记录:记录的序号为j,活动类型为直线运动(T),移动对象是零件Pi,移动的起点为Sj,终点为Ej;图中Rj(j,Pi,Dir,Ang)表示在拆卸活动记录表中增加一条记录:记录的序号为j,活动类型为螺旋运动(R),旋转方向为Dir(右转或左转),旋转圈数为Ang。
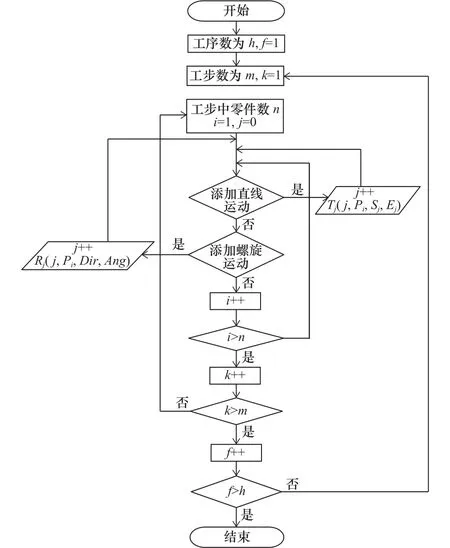
图3 拆卸活动流程图
1.2.2 拆卸活动的“逆操作”
拆卸活动记录表中顺序存储了一系列拆卸活动,包括直线运动、旋转运动及其它运动。由拆卸活动记录表生成装配活动记录表,采用逆操作。逆操作包括两类,即活动顺序的“逆”操作和拆卸活动属性的“逆”操作,具体如下:
(1)记录顺序的颠倒,假设拆卸活动记录表中有n条记录,拆卸活动记录表中的第j条(j≤n)记录,复制为装配活动记录表中的第(n-j+1)记录。
(2)平移活动的起点和终点互换,如果拆卸活动记录表中的平移活动为Tj(j, Pi, Sj, Ej),则转换为装配活动表的装配活动为Tn-j+1(n-j+1, Pi, Ej, Sj)。
(3)旋转活动的旋向左右互换,即拆卸活动表中如为右旋,则在装配活动表中设为左旋;拆卸活动表中如为左旋,则在装配活动表中设为右旋;如果拆卸活动记录表中的旋转活动为Rj(j, Pi, Dir,Ang),则转换为装配活动表的装配活动为Rn-j+1(n-j+1,Pi,Dir*(-1),Ang),即右旋*(-1)=左旋,左旋*(-1)=右旋。
拆卸活动记录表的“逆”变换过程如图4所示,经过此流程由拆卸活动记录表就生成了装配活动记录表。
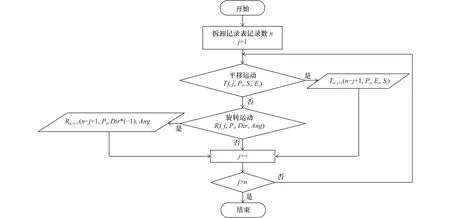
图4 拆卸活动记录表“逆”变换流程
2 三维装配工艺规划系统的研究与应用
我们利用上述基于MBD的装配信息模型PPSP和“拆卸定义装配”来规划装配活动的方法,构建基于MBD的三维装配工艺规划系统(简称3DAP系统)。
2.1 3DAP 系统功能架构
三维装配工艺规划系统3DAP分为3层,如图5所示,自下而上分别为:
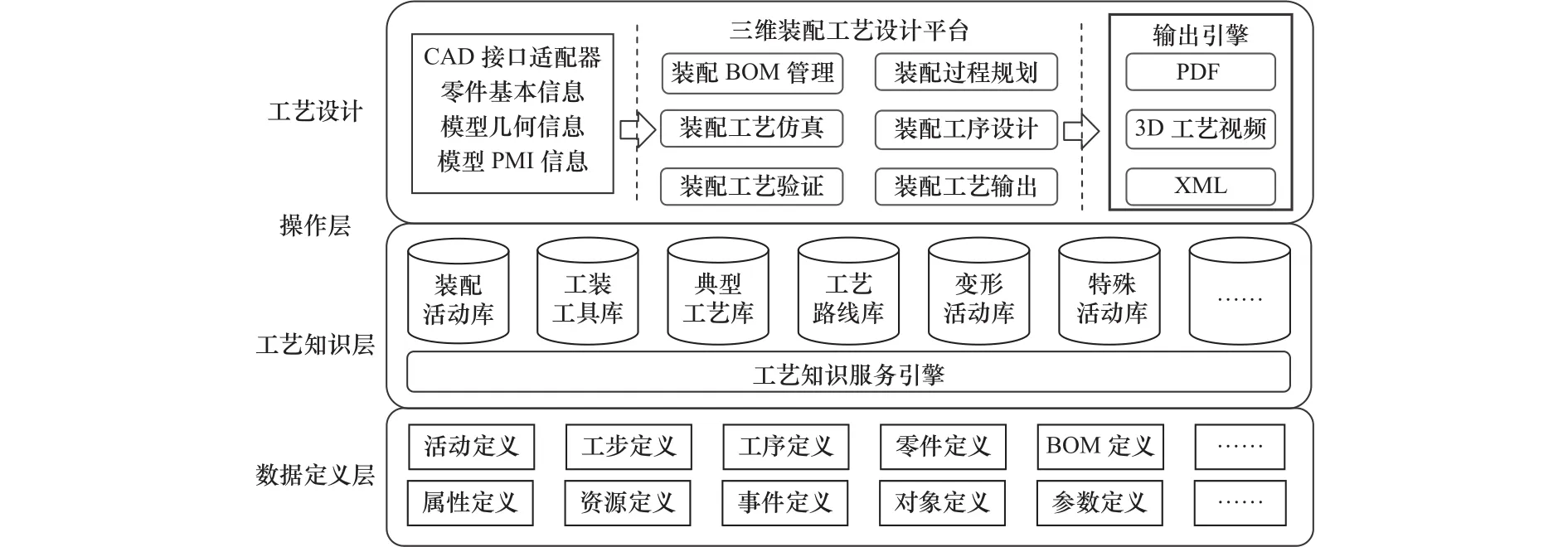
图5 3DAP 系统架构图
(1)数据定义层,提供数据定义器,用于定义系统能够被引用的元数据模型,包括属性、资源、事件、对象、参数等元数据,以及使用元数据建立的装配工艺对象模型,包括活动、工步、工序、零件和BOM等对象。
(2)工艺知识层,包括装配工艺知识库和服务引擎,知识库包括装配活动库、工装工具库、典型工艺库、工艺路线库、变形活动库(如弹簧、开口销、卡圈等的变形活动)和特殊活动(焊接、涂胶、清洗等)。
(3)工艺设计操作层,提供三维装配工艺设计的操作,包括与上游CAD的适配、装配BOM管理、装配过程规划、装配工序设计、工艺仿真、工艺验证和工艺输出等功能。
2.2 核心功能模块
2.2.1 装配 BOM 管理
3DAP系统接收3DCAD完成的设计模型,获取模型的装配结构即设计EBOM,并将模型进行轻量化处理,以降低计算机硬件的开销来提高模型操作和显示的流畅性;并补齐设计模型中缺少的螺钉、螺母等紧固件,对于机电产品,必要时补充线缆等。
2.2.2 装配过程规划
装配过程规划是规划产品的装配工艺路线,即定义出需要多少装配工序,并分配工序中的装入件,装配过程规划基于三维模型,从装配BOM树上采用拖拽方式,将零部件移入装配工序中,防止漏装。
2.2.3 装配工序设计
装配工序设计采用“拆卸定义装配”的方式实现,如图6所示为3DAP系统的界面,左边是产品装配信息树,上半部是产品的装配过程,包括工序、工步和活动,下半部属性(见图5左下方的“属性”区)显示当前装配节点对应的基本信息、装配对象、轨迹内容,以及在描述工序中所需的音频、图片或其他自定义的。
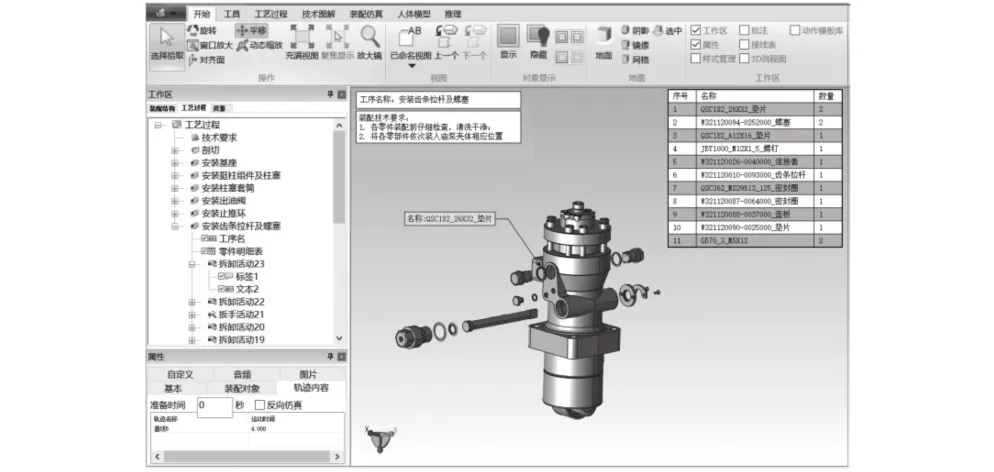
图6 3DAP 系统界面
除了定义装配活动之外,还可以填写装配工序名称、内容、所用到的工装工具等信息,必要时标注关键尺寸、零件的引出标注、BOM表或其他提示类信息。
2.3 三维装配工艺规划系统 3DAP 的应用验证
以某厂油泵的装配工艺对3DAP系统进行验证,界面如下图6所示。系统接收CATIA完成的三维产品设计模型,在3DAP系统中完成装配工艺过程规划、详细的工序设计,并进行了工艺仿真、干涉检查。如图6所示,在工序“安装齿轮条拉杆及螺塞”中可清楚看到,装配顺序从上到下对应拆卸活动的逆序,下方“轨迹内容”中显示拆卸活动为“直线运动”,查看“直线”的属性可显示直线运动的起点和终点坐标。
经过验证,三维装配工艺规划系统3DAP能够较好地满足制造企业三维装配工艺编制的要求,并为企业的设计、工艺与制造一体化管理起到桥梁作用。
3 结语
通过对MBD技术的研究,形成了基于MBD的装配信息模型PPSP模型;采用PPSP模型和“拆卸定义装配”的方法研发了三维装配工艺系统3DAP,此系统是集文字、模型、标注及动画于一体的可视化装配工艺设计环境,实现了装配工艺的三维可视。该系统通过在某制造企业的应用,验证了系统的合理性与有效性,缩短了装配工艺设计周期,提高了装配效率和质量。
猜你喜欢
现代工业经济和信息化(2022年8期)2022-09-24 08:14:52
昆钢科技(2022年2期)2022-07-08 06:36:14
太空探索(2022年6期)2022-06-23 06:25:26
太空探索(2022年3期)2022-03-28 08:21:52
太空探索(2021年3期)2021-03-19 09:14:00
锻造与冲压(2021年3期)2021-02-27 07:12:12
太空探索(2020年9期)2020-09-16 10:56:16
石材(2020年4期)2020-05-25 07:08:50
建材发展导向(2019年10期)2019-08-24 06:24:30
制造技术与机床(2018年8期)2018-10-09 08:27:48
