
基于UDGDP的转子故障数据集降维方法
2022-08-26 08:50:58杨泽本赵荣珍
振动与冲击 2022年16期
杨泽本,赵荣珍,刘 强
(兰州理工大学 机电工程学院,兰州 730050)
设备的监测数据反映其实时运行状态,它是分析故障源以及状态变化的重要依据。随着工业互联网的迅猛发展以及企业对数据依赖程度的不断加强,各种机械装备的状态监测数据已经成为企业生产运行、监控管理和发展智能制造不可或缺的重要战略资源[1]。
旋转机械作为一类广泛使用的动力设备,对其实施智能化运行维护管理意义重大[2]。工程上往往采集旋转机械系统关键部位的振动信号作为基础数据,通过提取其时域、频域、时频域等量化特征来表征机械设备的运行状态。但随着特征数目的增加,会产生“维数灾难”问题,并且特征之间可能会呈现出一定的相关性,大量有效信息被淹没,很难得到有效的故障状态量化表征结果。因此,在发展基于数据科学原理指导的旋转机械智能运维管理技术中,如何从大数据中挖掘出有利于实施分类运算的敏感故障特征,显然这对于促进数据驱动的智能故障诊断技术尤为关键[3]。
近年来,关于数据降维问题的研究在计算机科学学科和故障诊断领域中均已取得了很大的进展。典型的如局部保持投影(locality preserving projection,LPP)[4]、无监督判别投影(unsupervised discriminant projection,UDP)[5]、局部Fisher判别分析(local fisher discriminant analysis,LFDA)[6]等。这三种算法都是利用近邻图来表征数据间的局部近邻关系,并将数据投影到一个反映其本质的流形结构上,在模式识别等方面取得了较好的效果。但是LPP、UDP本身属于无监督算法,没有充分利用样本的类别标签,导致无法准确提取关键信息,在分类时容易出现错分现象。LFDA虽然具备监督特性,但它输出的低维特征之间相关性较大,含有大量冗余成分,因此文献[7]在LFDA中添加不相关约束条件,提出了有监督不相关局部Fisher判别分析(supervised uncorrelated local Fisher discriminant analysis,SULFDA)算法,利用轴承特征数据集验证了其有效性。进一步地,文献[8]针对LPP单个近邻图无法保持完整结构信息的缺陷,设计了双邻接图判别近邻嵌入(double adjacency graphs-based discriminant neighborhood embedding,DAGDNE)降维算法,通过构建类内局部近邻图、类间局部近邻图使低维空间同类样本点距离更近,异类样本点距离更远,实现了完整结构特征信息的提取。在DAGDNE的基础上,文献[9]提出了一种双邻接图判别投影(double graphs-based discriminant projections,DGDP)算法,该方法在定义权重时不仅考虑样本点的几何分布,而且充分利用类别信息,在降维时进一步加强了保持几何和判别信息的能力,并在人脸识别中取得较好的应用效果。
鉴于不相关约束能够减小低维特征之间的相关性,且双邻接图可以完整地保持局部近邻结构关系,本研究将二者优势进行结合,对旋转机械故障特征集的降维问题展开了研究,提出一种基于不相关约束的双邻接图判别投影UDGDP降维算法。该算法在类别标签的指导下,通过构建双邻接图使类间局部散度最大化,类内局部散度最小化,从而在降维时最大程度保留有利于分类的信息;与此同时在UDGDP目标函数中施加不相关约束条件以消除冗余的信息,实现对敏感故障特征更为有效地提取。该研究欲为基于数据驱动的旋转机械智能故障诊断中出现的“维数灾难”问题提供一种解决思路。
1 相关原理简介
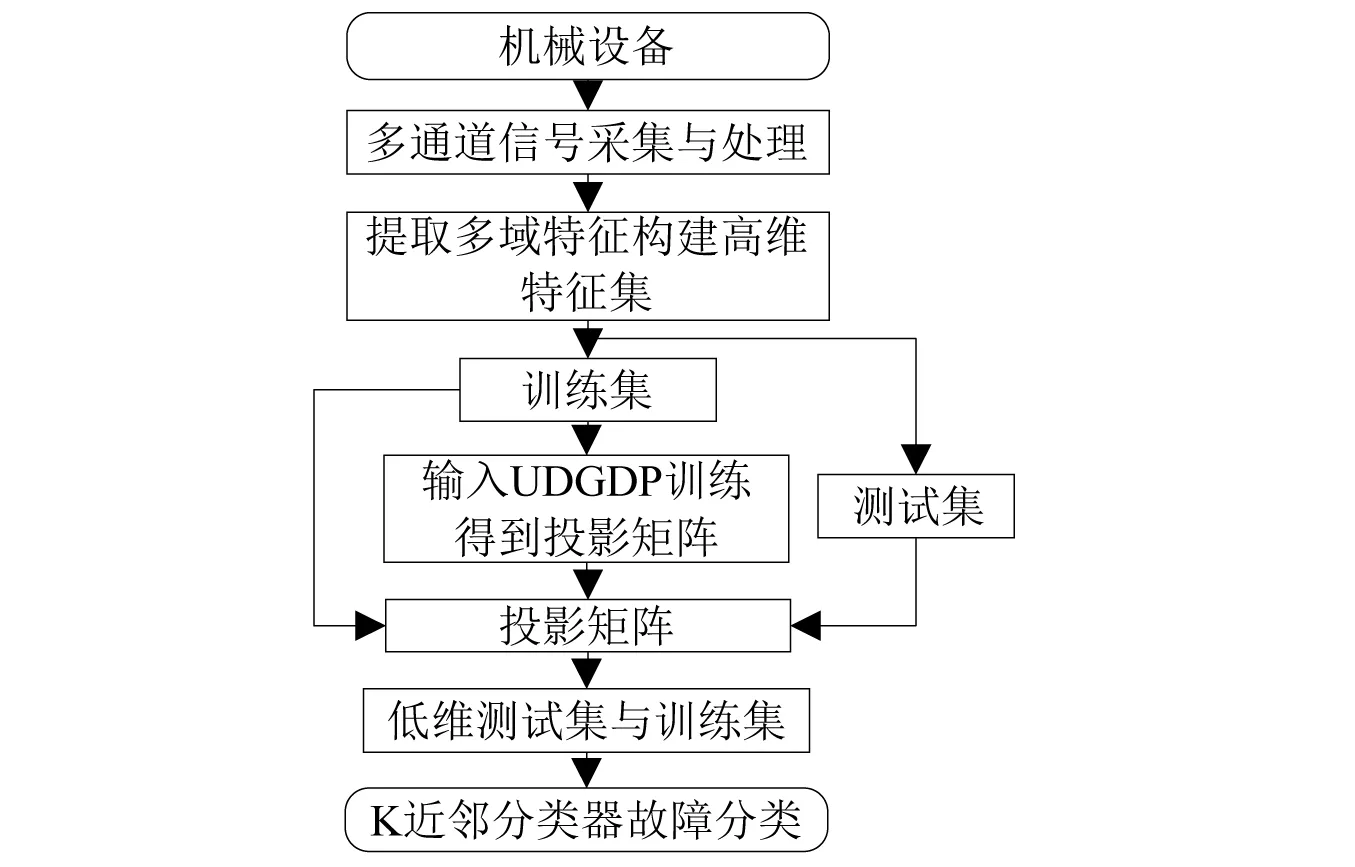
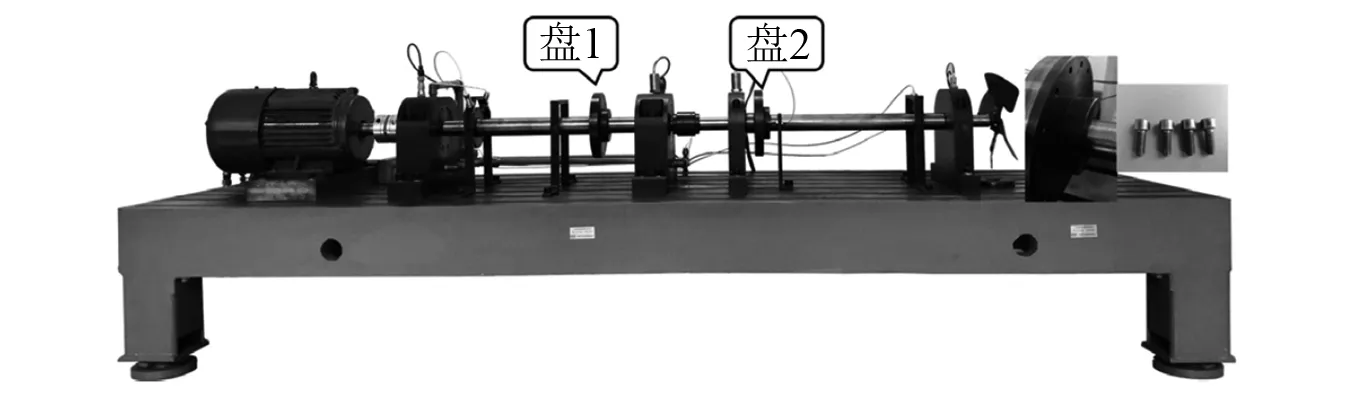
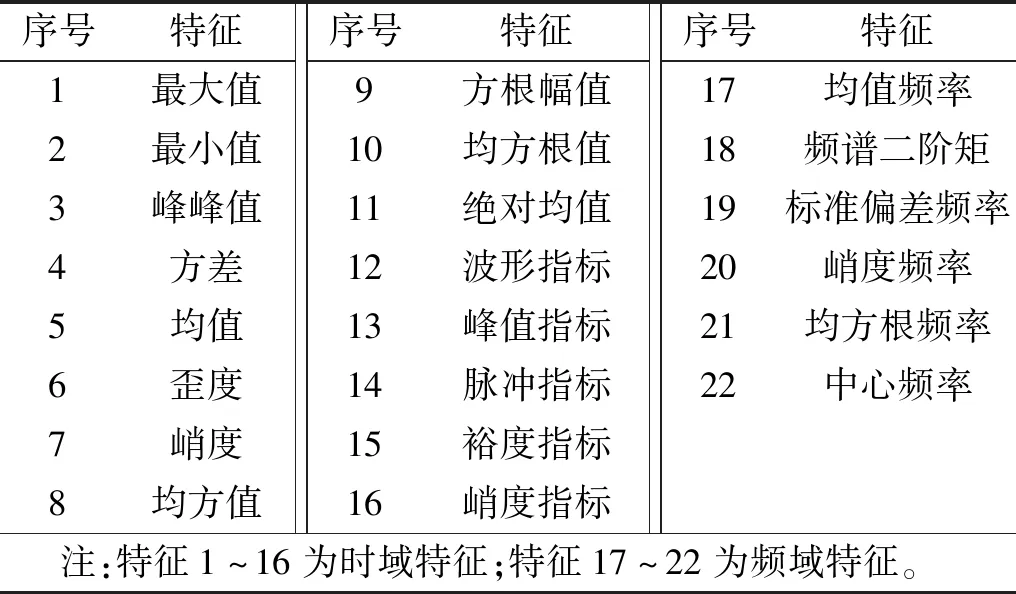
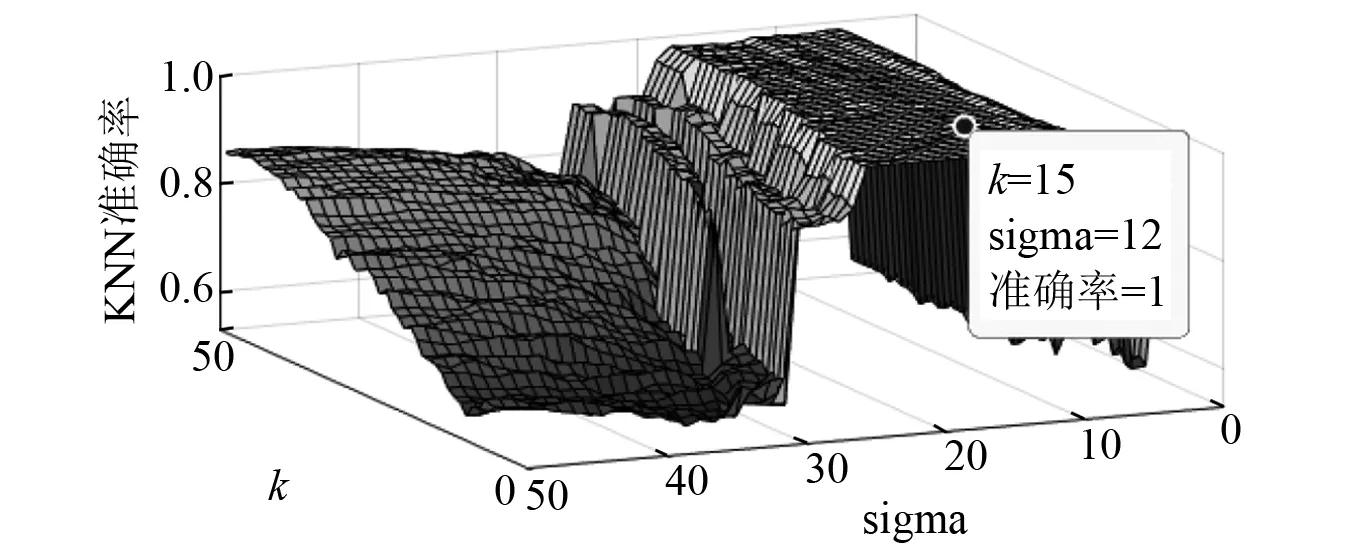
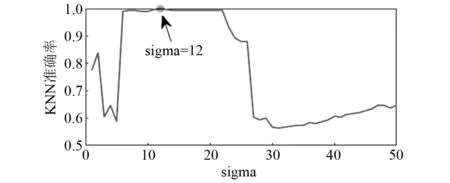
关于数据降维的物理涵义基本如下:设高维数据集为X=[x1,x2,…,xn]∈Rm×n,其投影矩阵为φ。X经过投影后可得到低维数据集Y=[y1,y2,…,yn]∈Rd×n,其中d为目标维数且d 该算法的目标函数被定义为 (1) (2) 最终将上述问题转化为式(3)广义特征值问题的求解 (3) 根据式(1)与式(2),可构造出局部近邻图,它能够表征数据流形的局部几何关系。但是在DAGDNE算法中,将近邻样本之间的权重设置为固定值并且将类内与类间局部近邻图的关系视为同等重要,难以挖掘数据流形中几何和判别结构信息,故对分类精度造成一定的误差。 根据李锋等的研究,原始特征集经投影后,得到低维特征集Y的第i个特征εi与第j个特征εj之间的协方差为 Cov(εi,εj)=E(εi-Eεi)(εj-Eεj)T= (4) 若能够在降维算法中融入不相关思想,则不仅会消除投影变换后各个特征分量之间的相关性,而且能够减少低维特征之间的信息冗余,提高辨识精度。 为解决传统降维算法在对高维数据集进行降维时,无法准确提取关键信息而造成故障辨识精度偏低的问题,本节基于第1章的介绍,提出了UDGDP降维算法。该算法的数学原理如下所述。 将式(4)所述的不相关约束条件融入式(3),由此建立的UDGDP算法其目标函数如式(5)所示 (5) 式中:Sb=XLbXT为类间散度矩阵;Sw=XLwXT为类内散度矩阵;α为调节Sb与Sw重要性的调节系数。 为了使权重参数随着距离变化而做出动态调整,重新定义如式(6)所示的权重参数 利用迭代的方式求解投影矩阵φ=[φ1,φ2,…,φd]。投影矩阵的第一个矢量φ1取为广义特征方程[αSb-(1-α)Sw]φ=λφ的最大非零特征值对应的特征向量。假设已经确定了投影矩阵前d-1个向量φ1,φ2,…,φd-1,那么第d个向量φd是式(5)问题的最优解。运用拉格朗日乘子法,将问题转化为式(7) 令∂L/∂φd=0,可以得到 (8) 结合式(5)的约束条件得到 (10) (11) 由式(11)得到 记Dd-1=[φ1,φ2,…,φd-1]T,μd-1=[μ1,μ2,…,μd-1]T,则 由式(13)得到 将式(14)代入式(8)得到 Pd-1[αSb-(1-α)Sw]φd=λφd (15) 当前d-1个投影向量φ1,φ2,…,φd-1求出之后,第d个投影向量φd为式(15)的最大非零特征值对应的特征向量,进而得到φ=[φ1,φ2,…,φd],最后由Y=φTX,即可获得样本在低维空间的投影结果。 该算法的具体步骤如下: 输入:数据集X,近邻点个数k,核宽度σ,低维空间维数d。 输出:投影矩阵φ,低维特征集Y。 1)构建类内类间局部近邻图,利用式(6)求出权重参数,进一步得到拉普拉斯矩阵Lb与Lw。 2)确定类内与类间散度矩阵Sw与Sb。 3)根据式(5)所建立的目标函数,采用迭代方式求出投影矩阵φ=[φ1,φ2,…,φd]。 4)由Y=φTX计算高维样本在d维空间投影。 基于UDGDP算法的故障诊断实施流程如图1所示。 图1 故障诊断流程图Fig.1 Procedure of fault diagnosis 具体的故障诊断实施步骤如下: 步骤1对原始振动信号进行小波消噪处理,提取时域、频域等量化特征参数构建高维特征集X。 步骤2对高维特征集进行归一化,之后分为训练数据集trainX与测试数据集testX。 步骤3设定UDGDP算法的3个参数值,即近邻点个数k,核宽度σ,低维空间维数d。将trainX输入至UDGDP算法进行训练得到投影矩阵φ。 步骤4根据Y=φTX对trainX和testX分别进行投影,得到低维特征集trainY与testY。 步骤5将trainY与testY输入至KNN分类器,通过指标参数以及相关试验对降维效果进行评价与验证。 本研究通过图2所示的厚德自动化仪表有限公司转子故障模拟试验台进行研究分析。具体试验设置情况如下:在试验台上布置4个加速度传感器分别采集4个轴承座的2个径向(X,Y)和1个轴向(Z)振动信号,布置2个非接触式电涡流传感器采集转轴径向振动信号,在转速为2 800 r/min,采样频率为20 000 Hz的工况下,通过在盘1、盘2加装不同个数质量块来模拟转子质量不平衡1、不平衡2、不平衡3、不平衡4、不平衡5、不平衡6共六种状态试验,如表1所示。采集每种状态的数据样本共100组,其中50组作为训练,其余50组作为测试,按照表2顺序计算特征,得到包含14×22=308个维度的高维特征集。 图2 转子故障模拟试验台Fig.2 Rotor fault simulation test bench 表1 转子系统的故障状态Tab.1 Fault conditions of rotor system 表2 选择的特征参数Tab.2 Selected characteristic parameters α=ρ(Sb)/[ρ(Sb)+ρ(Sw)] (16) 式中,ρ(Sb)与ρ(Sw)分别为矩阵Sb与Sw的谱半径。 UDGDP降维算法涉及的参数有3个:近邻个数k、核宽度σ、目标维数d。k的取值一般在目标维数与各类样本个数之间,即d 图3 准确率随k与σ的变化Fig.3 The accuracy rate changes with k and σ 图4 当k=15时准确率随σ的变化曲线Fig.4 The curve of accuracy with σ when k=15 为评价低维测试集各个故障类别间的可分性,引入δ=SB/SW评价指标来量化降维效果 (17) (18) (19) 为验证UDGDP降维算法的有效性,首先将数据集分别输入至四种降维算法进行降维,之后对得到的低维特征集前三个维度进行可视化表示,最后利用类内类间可分性指标以及KNN识别准确率对各个算法的降维效果予以量化评价。试验结果如图5、表3与表4所示。 图5 基于不同方法的降维结果Fig.5 Dimension reduction results based on different methods 表3 不同降维方法评价指标Tab.3 Evaluation index of different dimension reduction methods 表4 不同降维方法识别准确率Tab.4 Recognition accuracy of different dimension reduction methods 由图5、表3和表4可以得出,LPP与UDP算法在降维后各个类别重叠严重,六种不平衡故障状态完全无法区分并且KNN识别精度较低。这是由于二者都属于无监督学习的范畴,没有充分利用类别标签信息来构造相似度矩阵,在寻找近邻点时可能出现近邻点来自异类的现象,因而在降维过程中无法增大类与类之间的距离,导致降维与分类效果不佳。经过DAGDNE算法降维后,三种故障状态能够完全分离,其余状态仍然存在类与类之间边界不明确的现象,由此可见双邻接图的引入有利于提取故障类别信息,但是由于权重参数是固定的,没有随距离的改变而发生动态变化并且DAGDNE算法中将类内与类间局部近邻图的关系视为同等重要,因此在一定程度上造成了有效信息的损失。 而经过UDGDP算法降维后,六种状态基本能够分离,可以得知UDGDP算法虽然基于DAGDNE,但降维效果和辨识精度都要优于DAGDNE。首先这是因为引入用于平衡类内与类间局部近邻图重要性的调节系数,以及动态变化的权重参数使得降维过程中流形结构得到了更好地保持;其次通过添加不相关约束进一步消除了低维特征间的相关性,有效剔除了冗余信息,保留了更有利于分类的判别信息。因此该方法取得了较好的效果。 为验证UDGDP降维算法是否具有消除低维特征集各个矢量间相关性的能力,将DAGDNE与UDGDP算法降维后得到的5个(类别数减1)特征矢量进行编号,分别记作特征1、2、3、4、5,特征间的相关系数见表5、表6。通过对比相关系数的数值可以发现UDGDP 算法降维后特征之间的相关性明显小于DAGDNE,这表明UDGDP算法提取的特征之间相关性较小,具有较好的分类能力。 表5 经DAGDNE降维后低维特征间的相关性评价结果Tab.5 The correlation evaluation results between features after dimension reduction of DAGDNE algorithm 表6 经UDGDP降维后低维特征间的相关性评价结果Tab.6 The correlation evaluation results between features after dimension reduction of UDGDP algorithm 在训练样本不充足的情况下,若算法具备优异的特征提取能力,这将会对故障的辨识分类起到事半功倍的作用。因此为验证UDGDP降维算法在不同数目训练样本下的降维效果,选取不同比例的训练样本与测试样本输入至四种降维算法进行降维[12],之后利用KNN进行分类,试验结果如图6所示。从图6可以看出,随着训练样本个数的增加,KNN识别准确率也逐渐提高,但总体上经过UDGDP算法降维后的识别率较为稳定,并且在训练样本不足的情况下仍然能够达到较好的辨识效果,这表明UDGDP具有很强的挖掘判别信息的能力。 图6 不同比例样本下的KNN识别准确率Fig.6 KNN recognition accuracy under different proportion of samples 为验证UDGDP降维算法的抗噪性能,在测试集中融入系数为a=0.5,a=1.0,a=1.5,a=2.0的随机噪声[13],之后利用四种降维算法进行降维,最后输入到KNN分类器进行分类,辨识准确率如表7所示。可以发现,随着噪声系数的增大,各个算法降维后的辨识准确率都随之降低,但UDGDP降维后准确率下降幅度较小且均高于其他几种方法,这表明UDGDP算法具有一定的抗噪性能。 表7 不同噪声系数下的KNN识别准确率Tab.7 The accuracy of KNN recognition under different noise parameters 为降低旋转机械故障数据集规模,达到提高分类器辨识准确率的目的,设计了一种基于不相关约束的双邻接图判别投影UDGDP降维算法。该算法通过构建两个局部近邻结构图,使低维空间的同类样本能够更加紧凑,异类样本能够更加分散,同时,为剔除低维判别分量之间的信息冗余,引入不相关条件对低维矢量进行约束,以实现高维数据集中判别信息的提取。利用转子故障数据集对设计的UDGDP算法进行验证,结果表明:相比于其他几种算法,UDGDP算法降维后有效降低了特征之间的相关性、消除了冗余信息,而且提取出了更具鉴别能力的特征,在故障辨识能力、特征提取能力以及抗噪能力方面表现出优异的性能。该方法可为数据驱动的旋转机械智能故障辨识提供新的解决方案。1.1 DAGDNE算法简介

1.2 低维特征矢量间的相关性度量
2 设计的UDGDP降维算法
2.1 构造的UDGDP目标函数



2.2 UDGDP算法的步骤
2.3 设计的故障诊断流程
3 UDGDP降维算法的实现
3.1 确定的原始故障数据集

3.2 确定的调节系数α求解方法

3.3 算法的参数设定情况
3.4 选择的降维效果评价指标

4 试验结果与分析
4.1 算法的性能验证情况



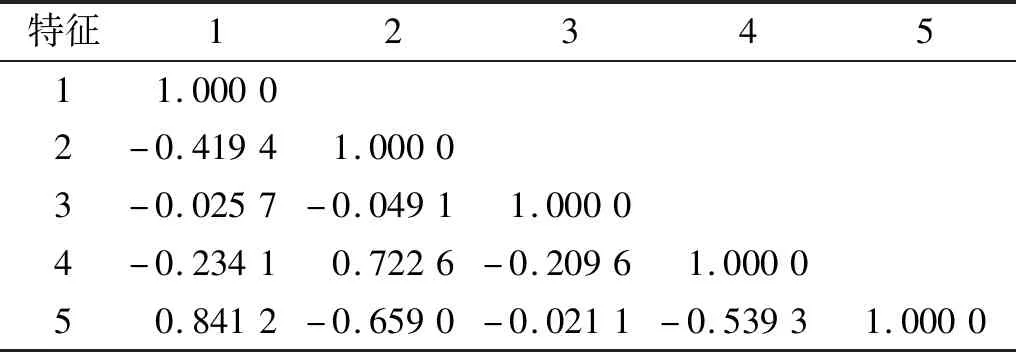
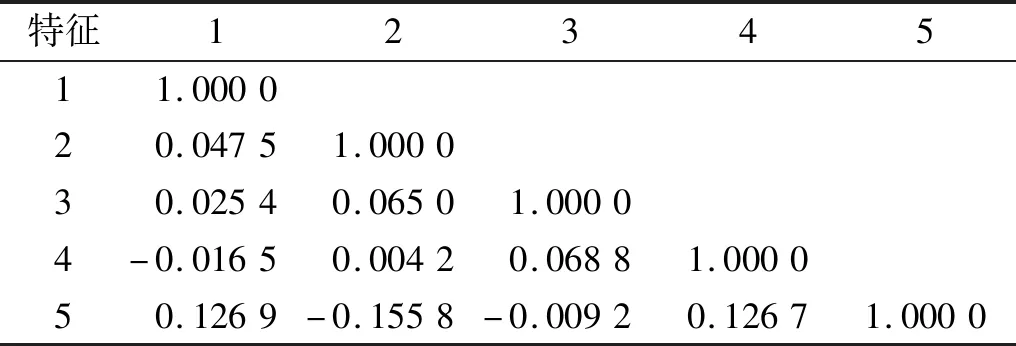
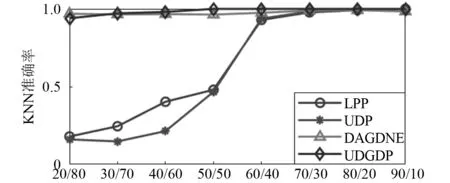
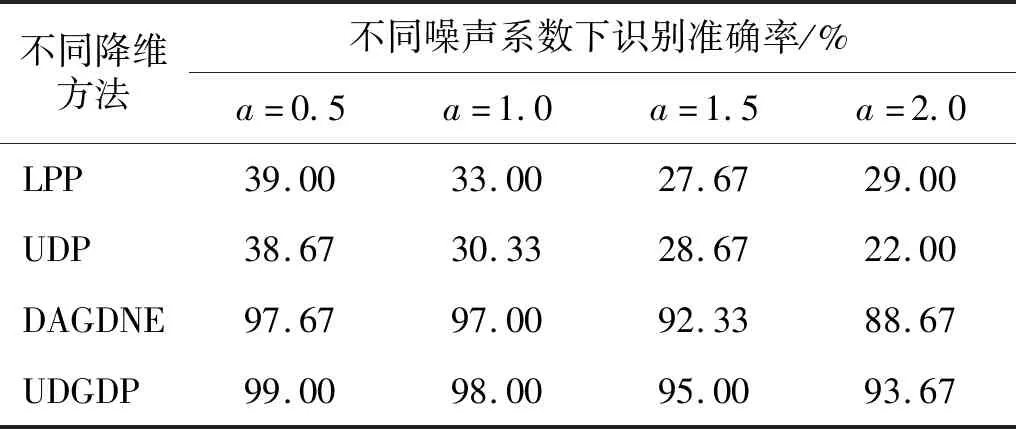
4.2 算法的特征提取能力与抗噪能力验证情况
5 结 论
猜你喜欢
车主之友(2022年4期)2022-08-27 00:57:12健康之家(2021年19期)2021-05-23 11:17:39医学食疗与健康(2021年27期)2021-05-13 18:46:23数学物理学报(2021年1期)2021-03-29 03:14:42农业科技与信息(2021年2期)2021-03-27 07:27:38新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34海峡姐妹(2019年12期)2020-01-14 03:24:40学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11学生天地(2019年15期)2019-05-05 06:28:28中国交通信息化(2018年5期)2018-08-21 03:37:40
