双转子磁通切换弧线电机特性的仿真研究
2022-08-25 14:16王文成胡建辉
微特电机 2022年8期
王文成,胡建辉,刘 飞,李 勇
(哈尔滨工业大学 电气工程及自动化学院,哈尔滨 150001)
0 引 言
弧线电机可以实现在有限转角工况下的直接驱动,控制精度高,系统结构简单,在天线扫描系统、机载雷达、机器人关节等诸多应用领域中得到了广泛的关注。传统弧线电机的永磁体置于转子,只有定子对面的永磁体才会产生有效驱动力,永磁体没有得到充分利用,并且裸露的转子永磁体易吸附铁磁杂质造成电机故障[1-2]。定子永磁型电机由于具备永磁体不易脱落、转子结构简单、机械强度高等优点逐渐受到关注[3-4],但该类电机存在转矩波动大、永磁体利用率有限的缺点,限制了该类电机的发展与应用。
弧线电机的转矩脉动主要受齿槽转矩和端部力矩的影响,同时磁通切换永磁电机(以下简称FSPM)受聚磁效应影响,使得齿槽转矩和转矩波动都相对较高,因此降低其转矩脉动是国内外学者最为关注的一个研究方向。文献[1]通过计算得到了一款弧线电机空载转矩中的齿槽转矩与端部力矩的占比。文献[3]与文献[4]提出了轴向拼接式磁通切换弧线电机,即电机由两套定转子组成,两套定转子之间相差半个转子齿对应的机械角,这种结构有效降低了齿槽转矩以及转矩脉动。文献[5]提出了一种圆筒式弧线电机,分析了电机参数对磁阻转矩的影响,并利用不等厚Halbach充磁方式降低转矩脉动。文献[6]提出了在弧线电机定子端部齿绕制补偿绕组,通过优化弧形定子长度配合在补偿绕组通入补偿电流的方式,抑制运行极限范围的转矩脉动,扩大电机平稳运行的范围。文献[7]提出了具有三维气隙的弧线永磁电机,定转子之间有3个作用面产生输出转矩,较大提高了功率密度。文献[8]与文献[9]提出了一种新型模块化磁通切换弧线电机,分析比较几种具有不同齿槽组合的电磁结构,采用优化定子模块宽度以及两端非磁性材料厚度的方法抑制齿槽转矩的一次谐波,通过注入谐波电流可以有效降低齿槽转矩的二次谐波,同时并不降低平均输出转矩。总体上看,现有弧线电机的研究均基于单边结构、功率密度等方面问题,未有兼顾功率密度与转矩波动的弧线电机研究。
为此,本文提出了一种新型的双转子模块化磁通切换弧线电机(以下简称DRMS-Arc FSPM),基于磁导函数法建立了空载转矩模型,研究了新型拓扑结构抑制端部力矩的方法,分析了DRMS-Arc FSPM中齿槽转矩的主要谐波含量并提出抑制方法,并着重分析双转子错位角对电机性能的影响。最后将新型拓扑结构与传统单边磁通切换弧线电机(以下简称Arc FSPM)进行对比发现,转矩波动与永磁体利用率均得到改善,为弧线电机的改进方向提供了新的思路。
1 空载转矩模型
Arc FSPM的输出转矩脉动主要取决于空载转矩峰峰值大小。弧线电机的空载转矩一般包括齿槽转矩和端部力矩。
1.1 单边Arc FSPM结构
FSPM转子极距与定子极距之比为12/10的结构从被提出至今已被广泛研究,因此本文电机构型也采用该配合关系。在磁通切换电机中一个定子极距长度包括一个定子槽口宽、两个定子齿宽以及永磁体磁化方向宽度,并且将上述宽度一般设计成等长结构,转子齿宽一般略大于定子齿宽。按照上述原则可以得到单边Arc FSPM的结构参数,如表1所示。
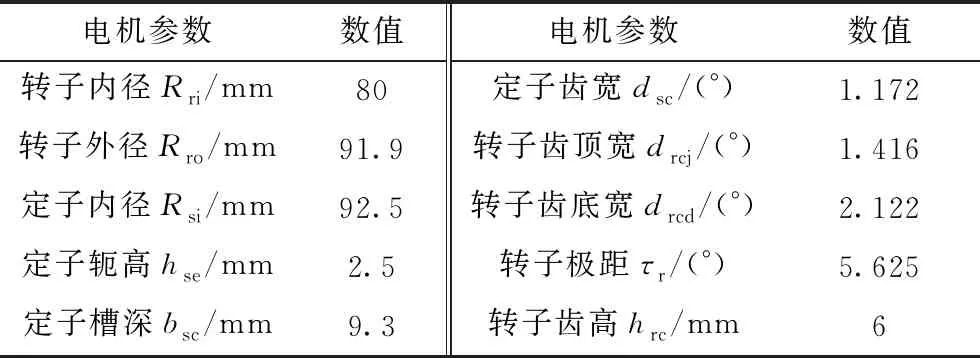
表1 单边Arc FSPM电磁结构尺寸参数
若想Arc FSPM获得平稳的转矩,就需要保证在正弦电流的激励下获得正弦电压,因此需要保证三相绕组电感基本相等[10]。而受弧形定子的影响,图1中单边Arc FSPM边缘绕组电感必然小于中间绕组电感。为平衡各项绕组自感,在弧形定子边缘添加辅助齿,如图2所示,此时电机自感均值基本保持一致,转矩脉动率下降了11.1%,在此后的电机构型中都包含辅助齿。
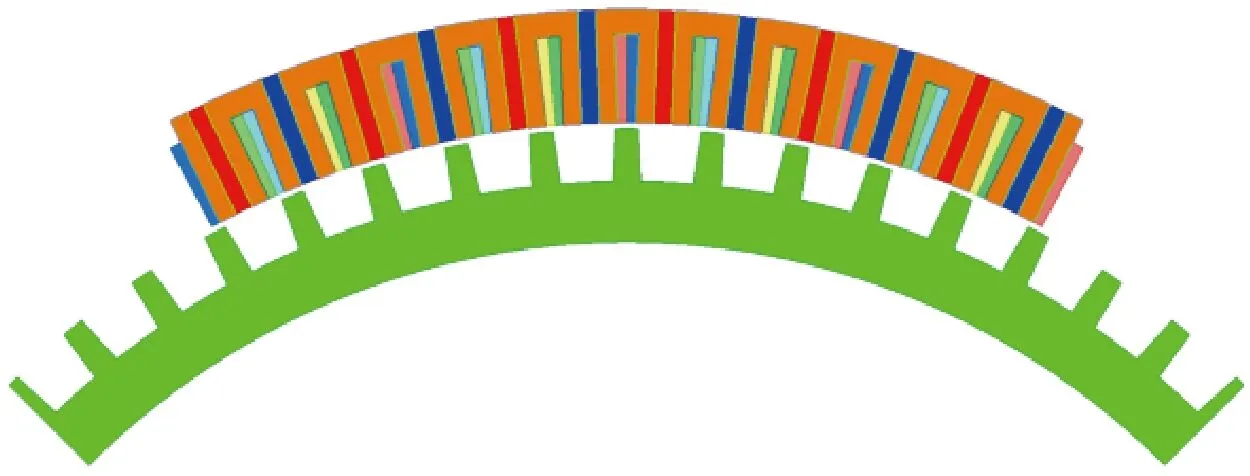
图1 单边Arc FSPM模型图
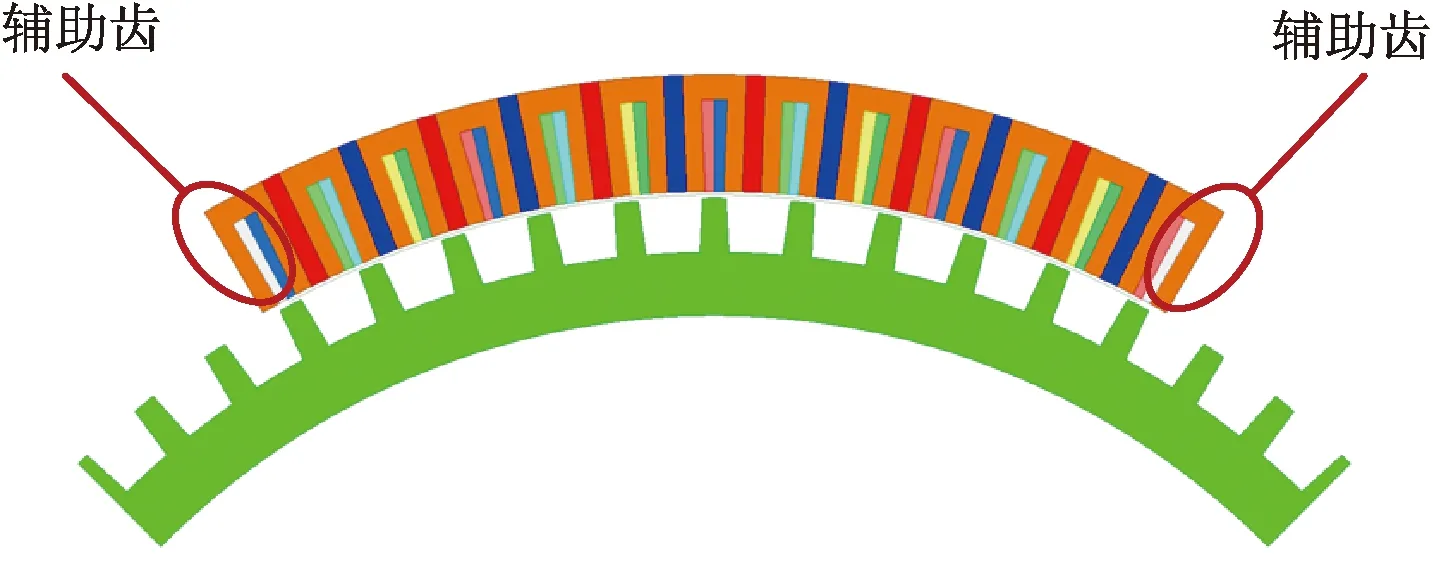
图2 带辅助齿的单边Arc FSPM模型图
1.2 齿槽转矩的磁动势-磁导模型
在建立齿槽转矩的磁动势-磁导模型时假设电机铁心永不饱和,不考虑永磁体的漏磁,气隙部分磁场只沿径向方向流动。为了暂不考虑端部力矩的影响,建立FSPM的整圆模型,该模型依旧保持定子极数为12与转子极数为10的比例关系,采用定子极数为48且转子极数为40的结构,如图3所示。
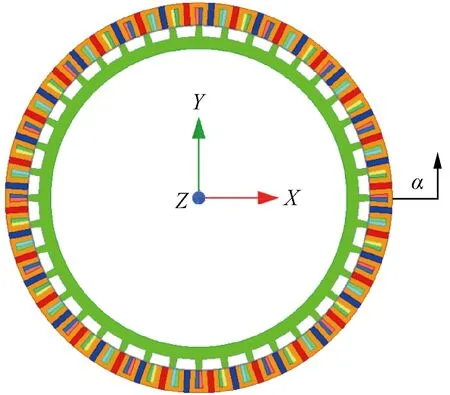
图3 48/40结构的FSPM模型
根据磁能密度we的定义:
(1)
得到在电机气隙内包括的磁场能量We:

(2)
式中:LFe为铁心长度;Rsi为定子内径;Rro为转子外径;τs为定子极距;α为转子旋转角度;FPM为永磁磁动势幅值;λ为转子齿磁导幅值。
根据文献[10],可推导得到齿槽转矩Tcog:
(3)
式中:FPMm为永磁磁动势傅里叶分解高阶项系数;λn为气隙磁导傅里叶分解高阶项系数。
式(3)仅在m=5n/6时齿槽转矩有值,若Tcog的周期为转子极距τr时,其谐波次数为6k。对一个极槽配合为48/40结构的FSPM进行空载转矩仿真分析,结果如图4所示。由图4中的谐波分析结果可知,该结构的FSPM空载转矩中6k次谐波含量丰富,从而验证了上述磁动势-磁导模型的正确性。
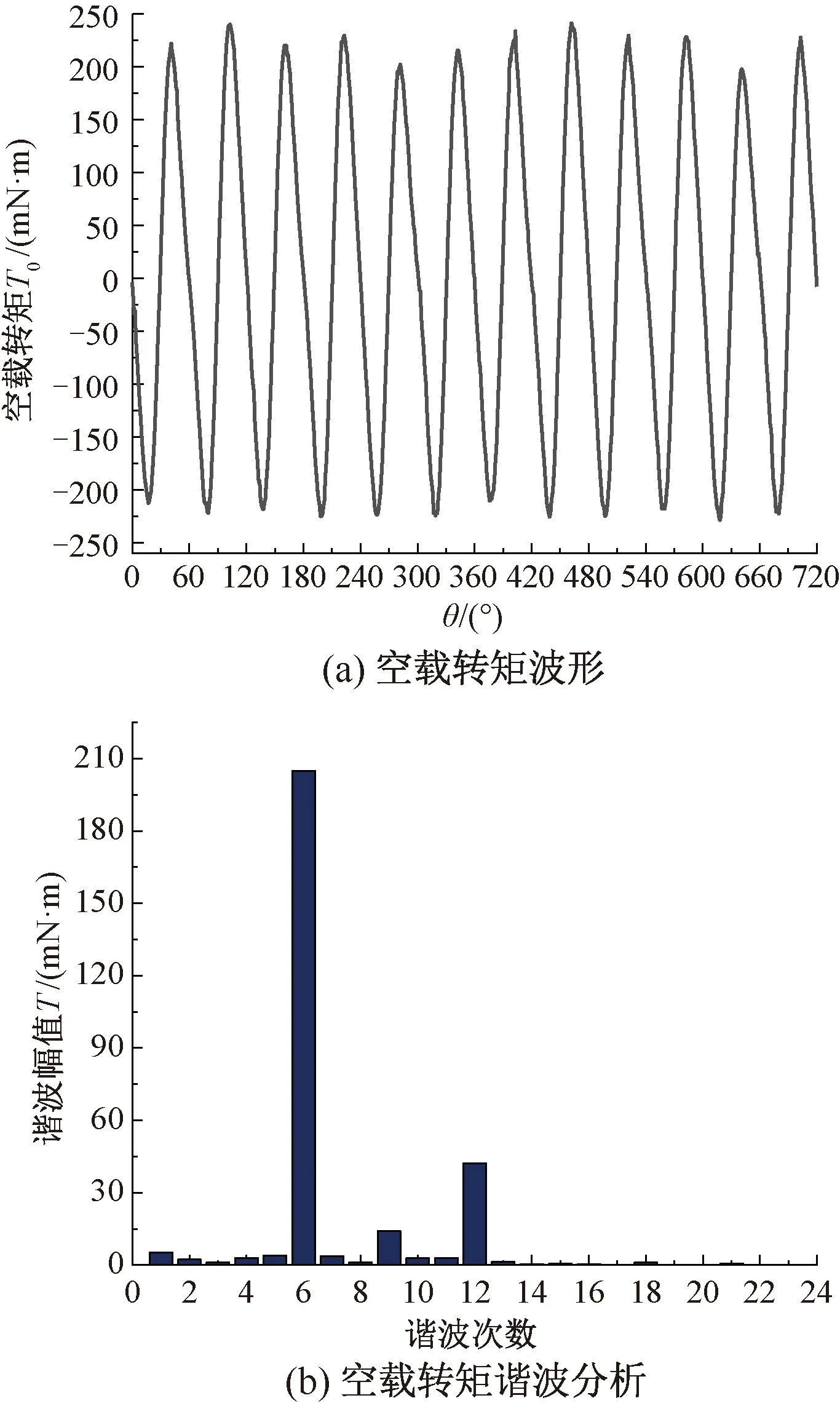
图4 48/40结构的FSPM空载转矩仿真结果
1.3 端部力矩的数学模型
对于弧形定子而言,左右两端定子边缘的受力大小幅值相等,但方向相反。同一时刻下力的大小可能并不相等,其值取决于定子两端边缘部分对应的转子位置,但转子的同一位置分别对应于弧形定子左右两端时,此时相应的端部力矩大小相同,方向相反[11],因此可以得到:
Tend,l|α=α′=-Tend,r|α=-(α′+LS)
(4)
式中:Tend,l、Tend,r为左、右端部力产生的力矩;LS为单个弧形定子所占圆周角。
根据文献[11],推导得到左、右端部力矩表达式:
(5)
(6)
因此,整个端部力矩是左右两端端部力矩的叠加结果,故:
Tend(α)=Tend,l(α)+Tend,r(α)=
(7)
单个弧形定子产生的空载转矩为端部力矩Tend与齿槽转矩Tcog之和。为验证端部力矩的存在以及端部力矩数学模型的正确性,对之前的48/40结构的FSPM的定子部分截取四分之一,并对其进行空载工况仿真,其空载仿真结果分别如图5所示。
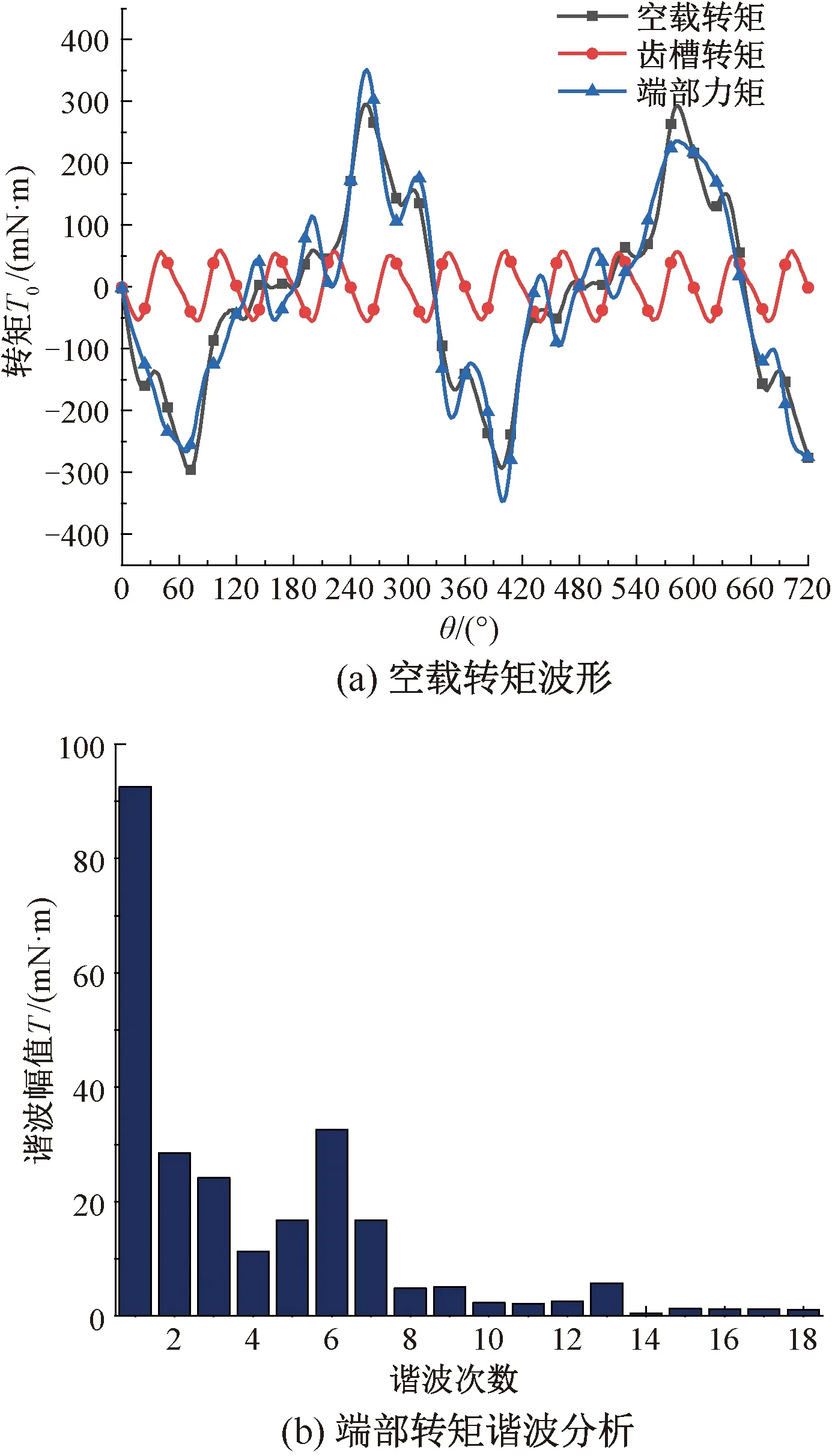
图5 48/40结构FSPM的1/4模型空载转矩仿真
由于仅取了48/40结构的FSPM整圆定子的四分之一,故齿槽转矩的幅值在理想情况下为整圆结构空载转矩的四分之一,在四分之一模型中空载转矩减去整圆模型空载转矩的四分之一即为端部力矩。由图5可知,端部力矩占比较大,并且谐波含量变化无规律,但以一次谐波含量为主,可以说明端部力矩数学模型的有效性,在后续部分可以尽可能降低端部力矩的一次谐波。
2 基于模块化定子结构的改进策略
由于端部力矩和齿槽转矩的共同影响,单边Arc FSPM的转矩脉动更加难以抑制,故本文在单边Arc FSPM结构基础上,提出一种新型的双转子模块化磁通切换弧线电机(DRMS-Arc FSPM),其结构示意图如图6所示,具体结构参数如表2所示。
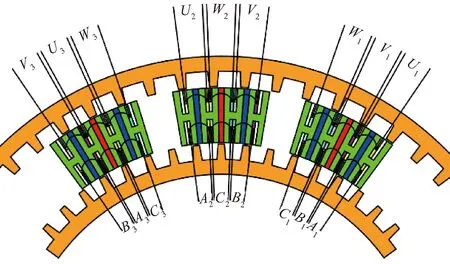
图6 DRMS-Arc FSPM的结构示意图

表2 DRMS-Arc FSPM电磁结构尺寸参数
2.1 绕组互感的平衡方法
由于弧形定子有限弧长的缘故,定子边缘绕组之间互感必然小于边缘绕组与中间绕组的互感,这将引起一定程度的转矩脉动。为了解决绕组互感不平衡问题,可以充分利用DRMS-Arc FSPM的多定子分布结构,3块弧形定子中内侧绕组相序按照ABC-BCA-CAB进行排布,外侧绕组按照UVW-VWU-WUV进行排布。定子块中的绕组在交叉排列的同时需要保证同相线圈的相位一致,因此需要满足:
τss+2τs=Nτr
(8)
式中:τss为定子块间隔;N为正整数。
DRMS-Arc FSPM的互感波形分别如图7所示。
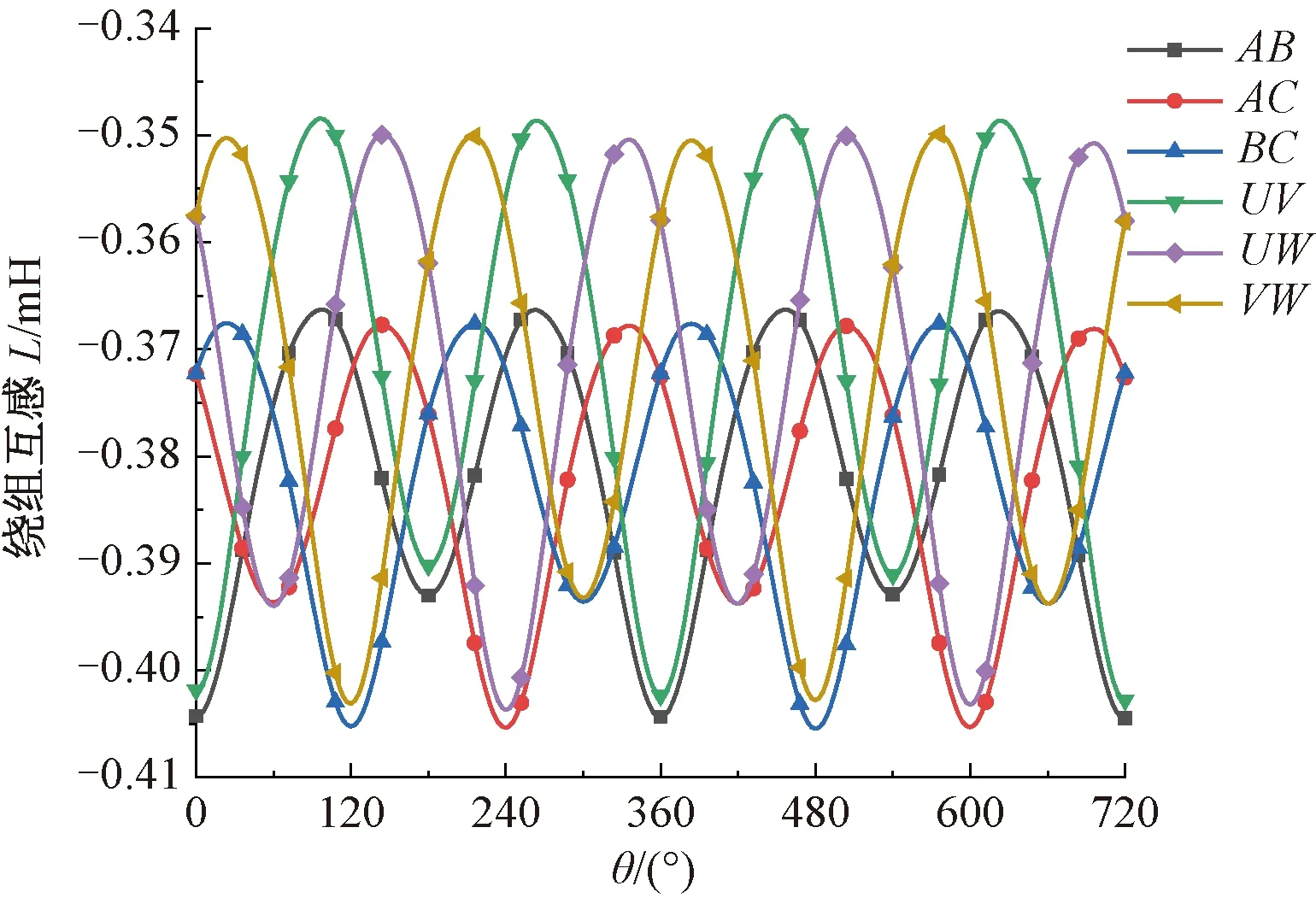
图7 DRMS-Arc FSPM的绕组互感波形
由图7可知,三相绕组互感均值相对平衡。若三相绕组通过交叉排列的方式来平衡各相绕组互感,则DRMS-Arc FSPM中定子块的数量必须为3的倍数个。
2.2 端部力矩的抑制方法
在Arc FSPM中单个弧形定子的端部力矩随转子旋转不断变化,但始终以转子极距τr为周期。若采用多定子分布结构,合理控制定子块之间的间隔,便可以控制转子受各个弧形定子块产生端部力矩的相位,因此由弧形定子端部力矩产生的合力有可能为0。本文DRMS-Arc FSPM采用3块定子,因此多定子块对转子作用的端部力矩之和如下:
Tend,t(α)=Tend,l1(α)+Tend,l2(α)+Tend,l3(α)+
Tend,r1(α)+Tend,r2(α)+Tend,r3(α)=
(9)
由式(9)可知,若使端部力矩中最主要的一次谐波为0,则需要满足:
(10)
由此可得出,定子块间隔τss需要满足:
(11)
定子块间隔不能太小,否则定子边缘漏磁发生耦合,影响电机的转矩平稳度。本文将定子间隔取为13τr/3,该值可以同时满足式(8)和式(11),对DRMS-Arc FSPM定子块的辅助齿槽口宽进行参数化仿真,仿真结果如图8所示。
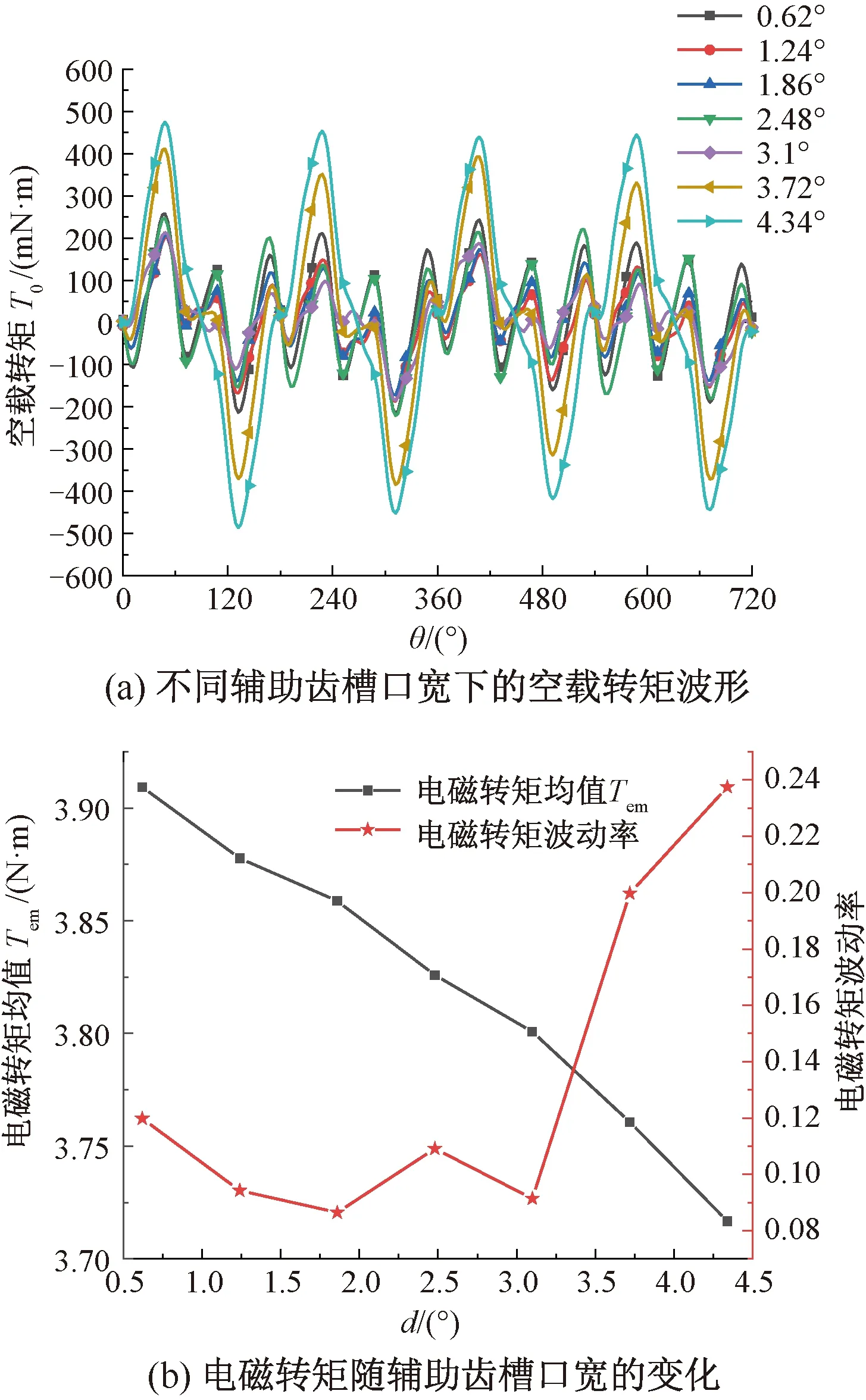
图8 定子块辅助齿槽口宽参数扫描结果
由图8可知,DRMS-Arc FSPM定子块间隔足够大时,空载转矩峰峰值随着辅助齿槽口宽的变化无明显变化,说明端部力矩基本被抵消,因此按照上述分析采用多定子块结构可以抑制定子端部效应对转子的作用效果,从而实现端部力矩和齿槽转矩的解耦,此时端部力矩已不再是空载转矩的主要成分。
3 基于双转子拓扑的改进结构
3.1 齿槽转矩抑制方法
单个弧形定子产生的齿槽转矩主要以6k次谐波为主,而DRMS-Arc FSPM采用三定子块结构,因此DRMS-Arc FSPM的齿槽转矩:
(12)
对DRMS-Arc FSPM内外转子所受空载转矩进行有限元计算并进行傅里叶分析,结果如图9所示。
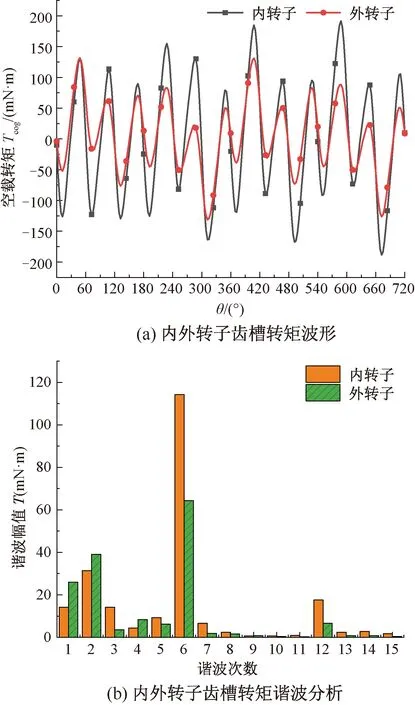
图9 双转子空载齿槽转矩分析
由图9可知,DRMS-Arc FSPM齿槽转矩的谐波含量依旧以6k次谐波为主,说明端部力矩抑制效果较好,同时1次谐波和2次谐波含量也相对较多,若适当调整内外双转子的错位角,便可以将齿槽转矩的主要谐波含量削弱甚至抵消。
假设DRMS-Arc FSPM的内外转子齿槽转矩仅包含1、2、6次谐波,其他谐波忽略不计,同时认为内外转子所受齿槽转矩相同,即包含的各次谐波幅值一致,则内外转子齿槽转矩如下:
Tcogi(α)=Tcog,1sin(Nrα+θ1)+
Tcog,2sin(2Nrα+θ2)+Tcog,6sin(6Nrα+θ6)
(13)
Tcogo(α)=Tcog,1sin(Nrα+θ1+Δφ)+
Tcog,2sin(2Nrα+θ2+2Δφ)+
Tcog,6sin(6Nrα+θ6+6Δφ)
(14)
式中:Tcogi、Tcogo为内转子、外转子齿槽转矩;Tcog,n为各次谐波幅值;θn为各次谐波初始相位角;Δφ为内外转子错位电角度。
DRMS-Arc FSPM的齿槽转矩以转子极距为周期,因此将内外转子错位角限制在一个转子极距内,即Δφ变化范围从0°至360°,理论上不同错位角下各次谐波叠加后幅值关系列如表3所示。

表3 不同错位角与齿槽转矩各次谐波叠加幅值关系表 (mN·m)
根据表3可知,在一个电周期内,双转子错位角若以180°中心依次递加与依次递减对齿槽转矩各次谐波叠加效果相同,当双转子错位角为90°与270°时,2次谐波与6次谐波皆可以抵消,此时DRMS-Arc FSPM的齿槽转矩幅值较小。对DRMS-Arc FSPM不同转子错位角下进行空载转矩仿真运算,计算结果如图10所示。
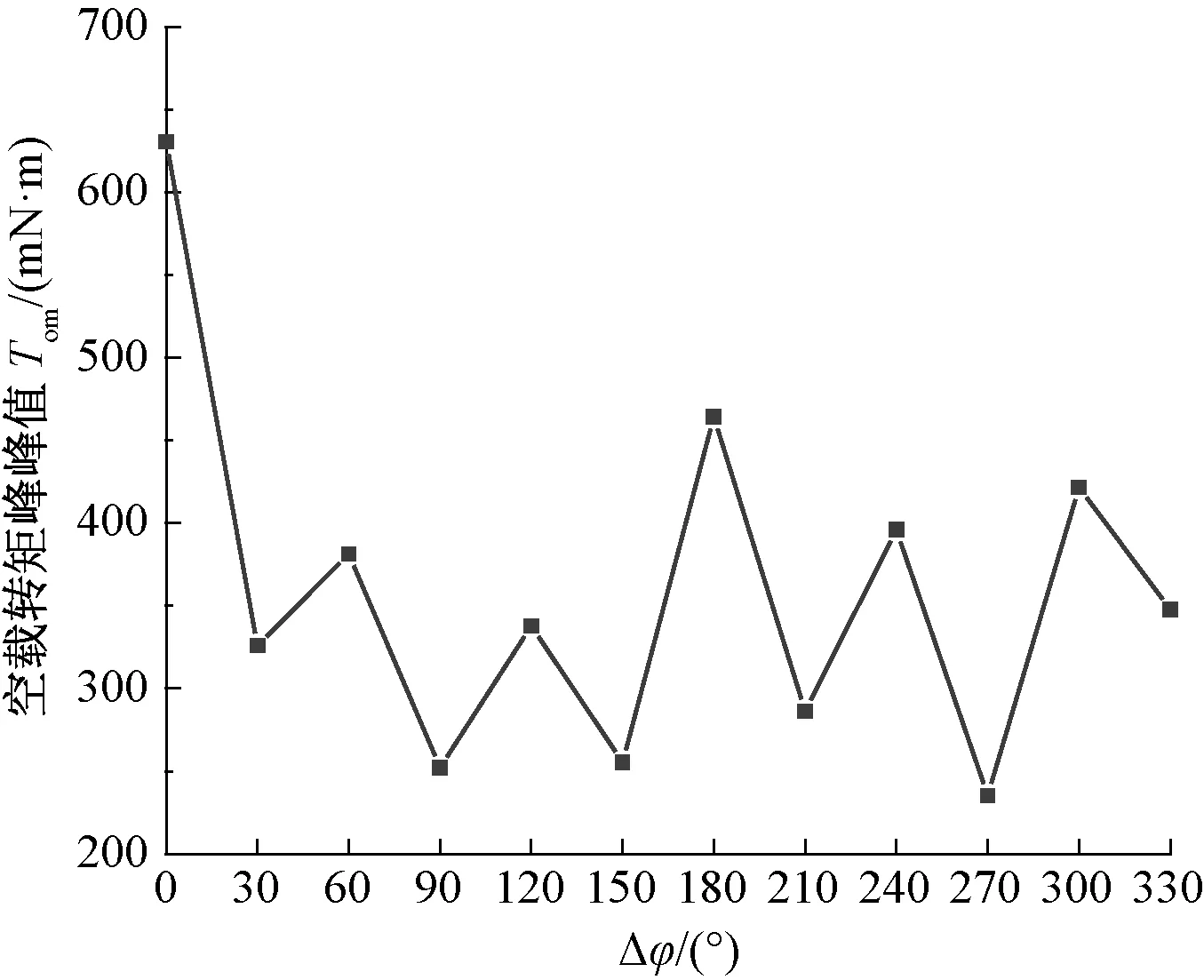
图10 不同双转子错位角与空载转矩峰峰值的关系
由图10可知,在双转子错位角为90°、150°、210°、270°时,双转子的空载转矩峰峰值都相对较低,并且以双转子错位角180°为轴,左右两侧的空载转矩峰峰值基本上呈现对称趋势,与理论分析是相符的。
3.2 双转子错位角的影响分析
不同的双转子错位角将造成DRMS-Arc FSPM运行时不同的磁通路径,如图11所示。
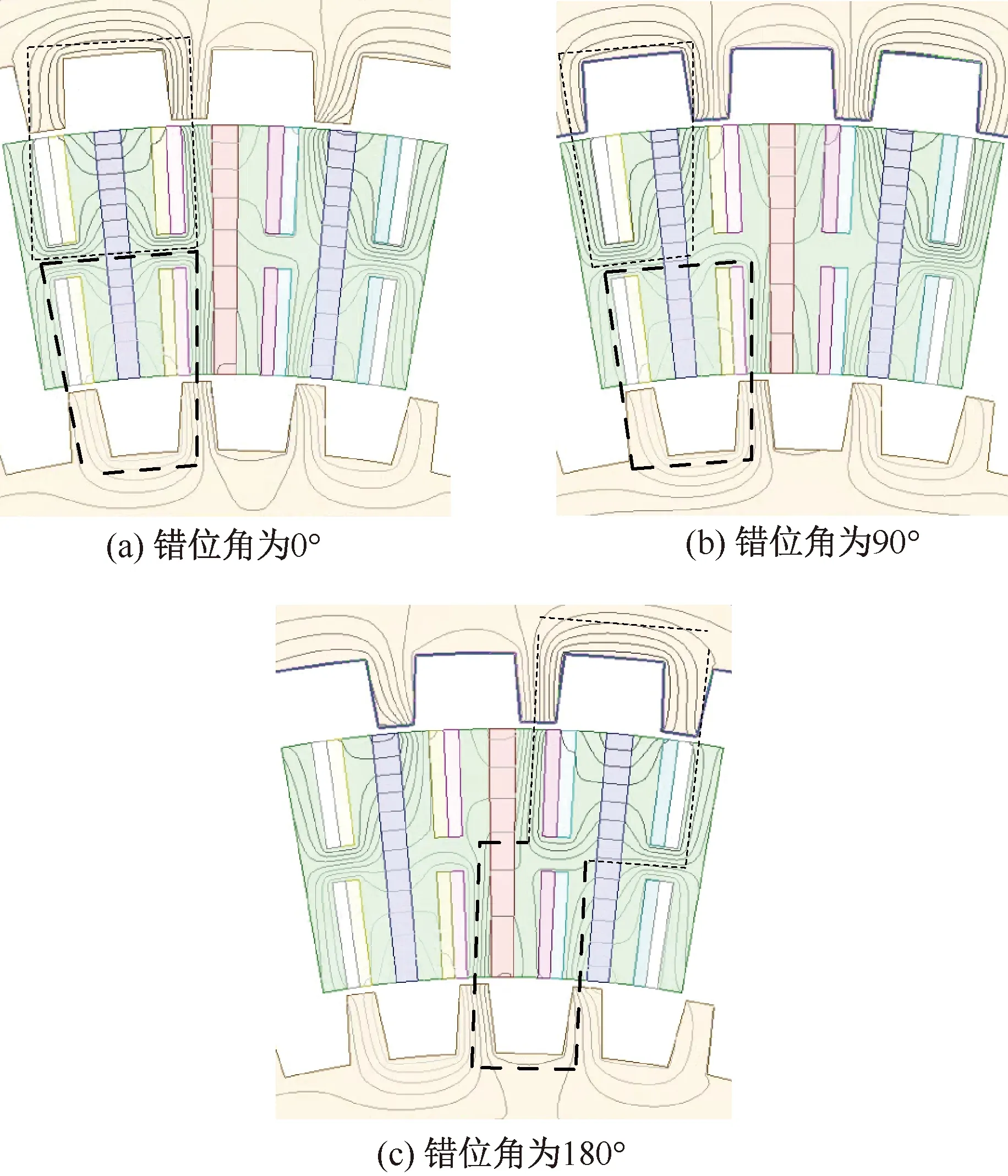
图11 不同转子错位角下的磁力线分布与主要磁通路径
在不同转子错位角时,电机对应的磁力线分布有所不同,DRMS-Arc FSPM表现出不同的电磁性能。对其进行负载运行仿真,结果如图12所示。

图12 不同双转子错位角与电磁转矩的关系
根据图12可知,随着转子错位角的增加,DRMS-Arc FSPM的电磁转矩表现出先增加后减小的趋势,在转子错位角为180°时电磁转矩均值最大,电磁转矩波动率以双转子错位角180°为轴,左右两侧基本上呈现对称趋势。转子错位角为90°和270°时,空载转矩峰峰值最小,因此电磁转矩波动率也较低。
DRMS-Arc FSPM采用双转子结构,定子部分也放置两套绕组,实际电机运行时更加希望内侧绕组与外侧绕组之间磁路关联和耦合关系尽可能低。以反电动势耦合率ku和外侧绕组与内侧绕组的互感为主要分析依据。反电动势耦合率定义如下:
(15)
式中:Ei为内侧绕组空载反电动势;E′i为忽略永磁体作用且仅给外侧绕组激励时内侧绕组的空载反电动势。
为获得E′i需要忽略永磁体作用,此时可将永磁体材料设置为空气。不同转子错位角时,电机内侧与外侧部分的耦合程度的仿真结果如图13所示。
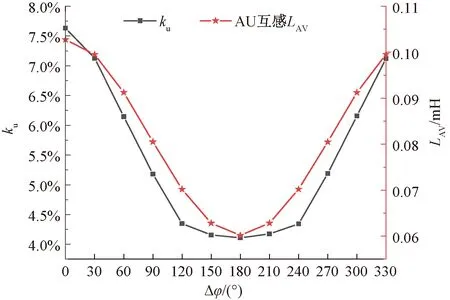
图13 不同转子错位角下的电机内外侧部分的耦合程度分析
由图13可知,随着转子错位角的增加,DRMS-Arc FSPM的反电动势耦合率以及A相U相绕组之间的互感以转子错位角180°为轴,左右两侧呈现对称趋势,因此在转子错位角180°时,外侧绕组电枢磁动势对内侧绕组的影响最小,电机内侧与外侧部分的耦合程度最小。因此,转子错位角180°是DRMS-Arc FSPM的最佳转子错位角。
4 仿真验证
DRMS-Arc FSPM的磁场分布如图14、图15所示。由图14、图15可见,电枢绕组激励产生的磁力线基本上不经过永磁体,说明该类电机的电枢反应一般不会使永磁体退磁。负载时内外侧绕组保持相同的电密,此时电机大部分位置的磁密基本上可维持在1.5 T以下,这说明DRMS-Arc FSPM还仍保持较高的过载能力。

图14 电枢绕组激励时磁力线图
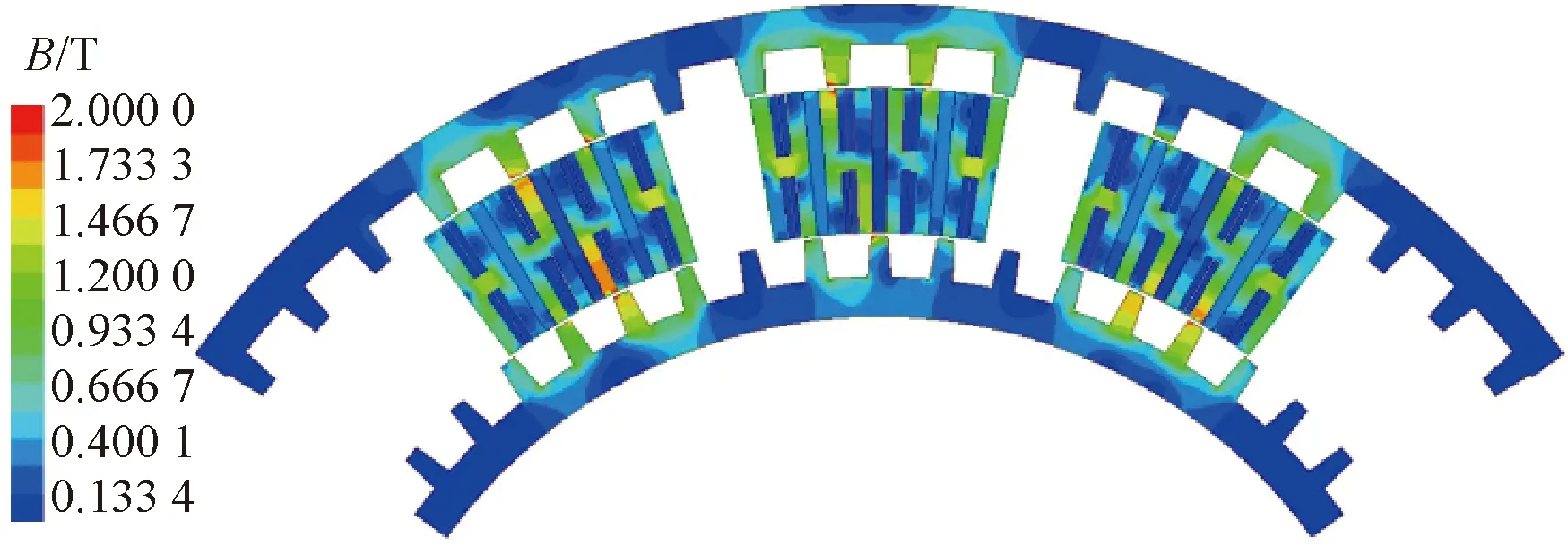
图15 负载磁密云图
DRMS-Arc FSPM的绕组空载反电动势波形和傅里叶分解如图16所示。三相绕组UVW的反电动势幅值略大于三相绕组ABC的反电动势幅值,这可能是由于电机外侧永磁体体积相对较大所致,同时内外绕组的反电动势谐波含量都相对较低,谐波畸变率分别为2.98%与3.10%,因此DRMS-Arc FSPM的绕组反电动势可保持高度正弦性,有利于对其驱动控制。
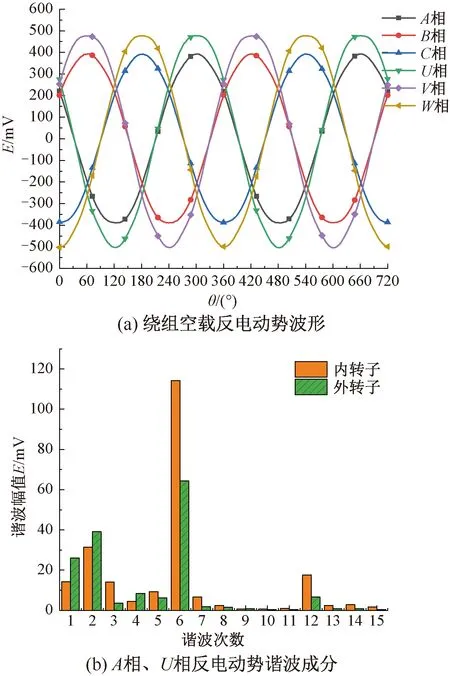
图16 绕组反电动势波形及谐波含量
对DRMS-Arc FSPM进行负载仿真分析时,保证内外绕组电密一致,同时与单边Arc FSPM的绕组电密保持一致,此时DRMS-Arc FSPM与单边Arc FSPM的电磁转矩波形分别如图17、图18所示。为了更好地比较两者电磁转矩,将单边Arc FSPM电磁转矩扩大2倍后与双转子电磁转矩进行比较。
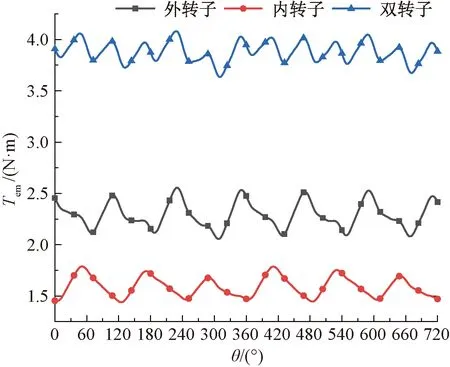
图17 DRMS-Arc FSPM电磁转矩波形
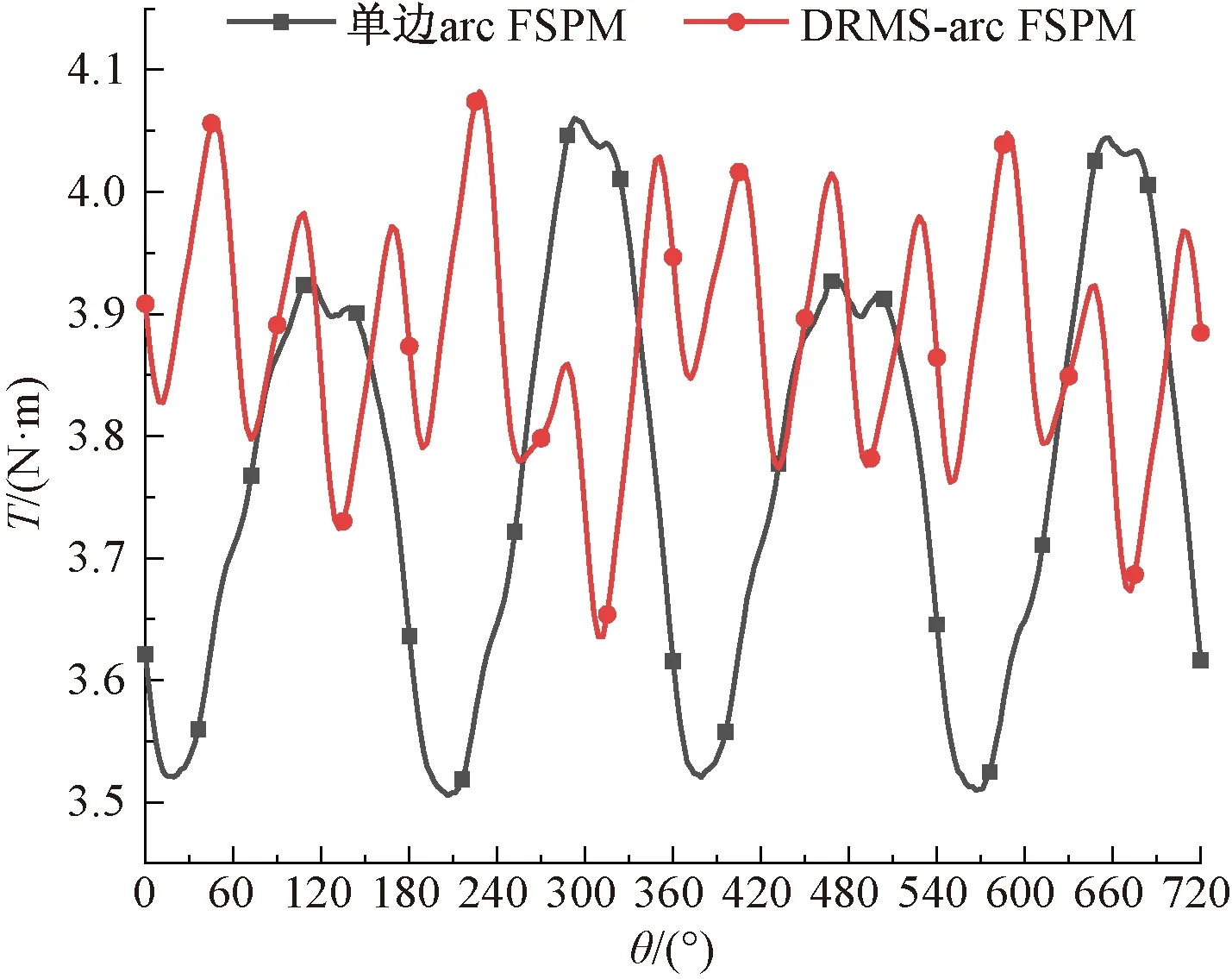
图18 DRMS-Arc FSPM与单边Arc FSPM电磁转矩波形
由数据可知,DRMS-Arc FSPM内转子的电磁转矩均值为1.59 N·m,转矩波动率为22%;外转子的电磁转矩均值为2.29 N·m,转矩波动率为21.9%;双转子的电磁转矩均值为3.88 N·m,转矩波动率为11.5%。因此内外转子通过180°错位角可以实现转矩脉动的抑制,且DRMS-Arc FSPM单位立方厘米的永磁体可产生0.45 N·m的转矩。
与此对应地,单边Arc FSPM电磁转矩均值为3.78 N·m,转矩波动率为14.7%,单位立方厘米的永磁体可产生0.35 N·m的转矩。经有限元结果验证,DRMS-Arc FSPM在抑制转矩脉动方面性能更好,相比于单边Arc FSPM永磁体利用率也将近提升30%,同时也证明了本文改进策略的有效性。
5 结 语
为改善弧线电机的转矩特性,本文从Arc FSPM齿槽转矩和端部力矩相互耦合难以分别抑制的问题出发,提出了DRMS-Arc FSPM的结构,并进行了特性研究。结论如下:
1)弧线电机采用模块化定子结构,在定子块间隔满足一定条件的情况下,可基本抵消转子的端部力矩作用,解决齿槽转矩和端部力矩相互耦合的问题。
2)DRMS-Arc FSPM中不同双转子错位角对齿槽转矩的抑制作用不同,综合考虑,转子错位角180°是DRMS-Arc FSPM的最佳选择。
3)有限元分析表明,与单边结构相比,双转子磁通切换弧线电机的转矩脉动降低了3.2%,永磁体利用率提升了30%,证明了该结构的优越性,对提升有限转角领域所用磁通切换弧线电机的转矩特性具有重要意义。
猜你喜欢
大电机技术(2022年4期)2022-08-30
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年1期)2022-02-16
船海工程(2021年6期)2021-12-17
新疆钢铁(2021年1期)2021-10-14
中国核电(2021年4期)2021-08-25
防爆电机(2021年3期)2021-07-21
魅力中国(2016年52期)2017-09-01
农机使用与维修(2014年1期)2014-09-23