融合大高差序列影像的单体异形建筑免像控建模方法
2022-08-18 08:53:10孙保燕周鑫覃禹程张小可黄邦伟
遥感信息 2022年2期
孙保燕,周鑫,覃禹程,张小可,黄邦伟
(桂林电子科技大学 建筑与交通工程学院,广西 桂林 541004)
0 引言
数字多维城市的发展为推进城市信息模型(city information modeling,CIM)基础平台建设奠定了基础,2020年9月印发了第一本城市信息模型标准——《城市信息模型(CIM)基础平台技术导则》。随着城市化速度加快,外形不规则、流线多向、立面复杂多样的异形建筑数量也越来越多。为顺应城市信息模型基础平台建设发展,以及建立城市实景三维模型和异形建筑的精细化实景三维模型需求日益显著,一个大高差环境下的高效率重建精细实景模型具有较高的前景和经济价值[1]。
目前免除地面像控点的无人机实景三维模型建模研究在国内有一定的进展,相比测绘地面像控点而言,减少甚至免除像控点的研究对无人机航测工作具有较大价值[2]。采用消费级无人机免除像控点的航测,能够有效地实现便捷测图工作[3],且能够完成很多不同类型的航测方案,为高效测图工作提供了很多便捷的途径[4]。
国内外诸多学者从无人机倾斜摄影测量技术关键技术的发展、像控点布设、航线规划、特殊场地模型创建等多方面展开了研究[5-6]。针对飞行高度、航摄倾角、航线方案等诸多问题,多数研究者采用多数据融合方式完成了单体建筑的精细化建模[7-8]。在大高差环境下,区域异形建筑精细化三维模型重建鲜有相关针对性研究。本文以校区大学生活动中心异形建筑为研究对象,提出一种基于消费级无人机融合大高差影像序列的单体异形建筑免像控建模方法。研究中涉及多环交叉环拍方案与五架次拍摄方案进行效率和精度对比,验证了多环交叉环拍方案的高效性、有效性,并采用“高空多环交叉环拍、弓形贴面环拍为主,航摄分区公共接边过渡影像为辅”的航摄影像采集方式,借助航摄分区公共接边过渡影像拼接大高差的不同航摄序列影像,完成区域单体异形建筑的实景三维模型重构。该方法重建的异形建筑三维模型纹理清晰,精度高,为大高差环境的城市建筑精细化三维建模提供了有效方案,可顺应城市信息模型基础平台的建设。
1 大高差影像三维重建技术
1.1 大高差影像介绍
在《工程摄影测量规范》(GB 50167—2014)4.1.12航高保持规定指出:同一航线上相邻的航摄图像的航高差不应大于30 m,最大航高与最小航高之差不应大于50 m,实际航高与设计航高之差不应大于50 m[9]。
1.2 飞行高度对影像质量的影响
如式(1)所示,在保证无人机的镜头焦距和感光元件(complementary metal oxide semiconductor,CMOS)的尺寸不变情况下,航摄高度与地面分辨率成正比关系。高空航摄条件下,地面分辨率数值越大,图像质量越差,重建的模型精度越差。为重建良好的高精度模型,需进行低空航摄,采集效果良好的图像分辨率图像。
(1)
式中:H为摄影航高,单位为m;f为镜头焦距,单位为mm;a为像元尺寸,单位为mm;GSD为地面分辨率,单位为m。
1.3 大高差影像融合关键技术
大高差实景建模技术的关键点为两组大高差序列像片可正常融合。重建影像间的几何关系,首先要保证影像有足够的重叠度[10]。研究中多环交叉航摄像片与立面弓形贴面航摄像片在垂直高度上远远高于50 m,属于大高差影像。由于像片距离和倾角差异过大的影响,两组像片间的重叠度极低,无法正常通过自动搜寻同名点的方式进行匹配,模型重建后易出现大面积分层、错层问题[11]。针对上述问题,本文提出一种大高差航摄分区公共接边过渡影像作为大高差像片融合的辅助匹配“桥梁”(图1)。
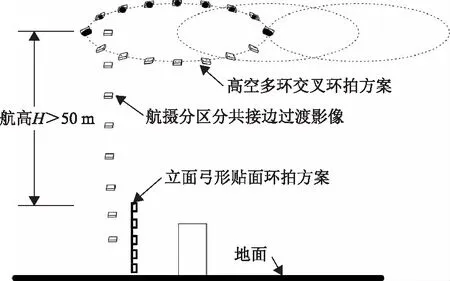
图1 航摄分区公共接边过渡影像示意图
过渡影像本质上属于摄影分区中的公共接边问题,在公共航摄区域设置上至下倾角为90°的过渡影像,保证图像识别与匹配有足够多的同名点。过渡影像的重叠度可为相似三角形的性质划分,需依据过渡影像相邻的上下像片重叠度和无人机相机尺寸大小确定影像的竖直距离差,即可确定过渡像片数量。依据相似三角形原理可得式(2)。
(2)
式中:i为过渡影像序列数量;f为无人机镜头固定焦距;m和n分别为感光元件长和宽;Hi为第i个过渡影像的航高;Mi和Ni为第i个过渡影像的取景范围的长和宽;Si为第i张过渡影像的取景面积。
依据式(2)已求出第i张过渡影像的取景面积Si,接着还需求出第i张过渡影像的航高Hi(式(3))。
(3)
式中:S2与S1为第二张与第一张过渡影像的面积;k为相邻过渡影像间的重叠度系数。假定已知相邻像片间的重叠度和初始过渡影像H1,即可求得第2张过渡影像的航高H2,同理可求得第i张过渡影像的航高Hi(式(4))。
(4)
以此类推,通过式(4)可得,已知第1张像片与第i像片的间距ΔHi,即可获得所需的过渡影像数量(需向上取整)。
1.4 GPS辅助光束法区域网平差
为实现免像控建模,应考虑偏移、漂移、曝光延迟等因素的影响,因此,需建立曝光延迟的区域网平差模型(图2)。传统的光束法区域网平差具有一定局限性,过度依赖控制点的选取和高端的无人机。曝光延迟可更方便地使用消费型无人机。GPS辅助光束法区域网平差公式如式(5)所示,根据式(5)求出相机坐标中的像点在像直角空间坐标系下的坐标,实现免相控建模。

图2 曝光延迟的区域网平差模型
(5)

1.5 平面多环交叉环拍技术
平面多环交叉航摄方案是一种区域选取拍摄,采用任意多边形拟圆航摄的方式取代常规弓形或者井字形航带网式航线航摄方式(图3)。在指定区域以及航摄高度,可设置不同航飞半径、航飞间距以及环绕方向数等参数。平面多环交叉环拍方案可代替常规五架次航摄方式,以少数像片从多视角方向获取地物丰富数据。
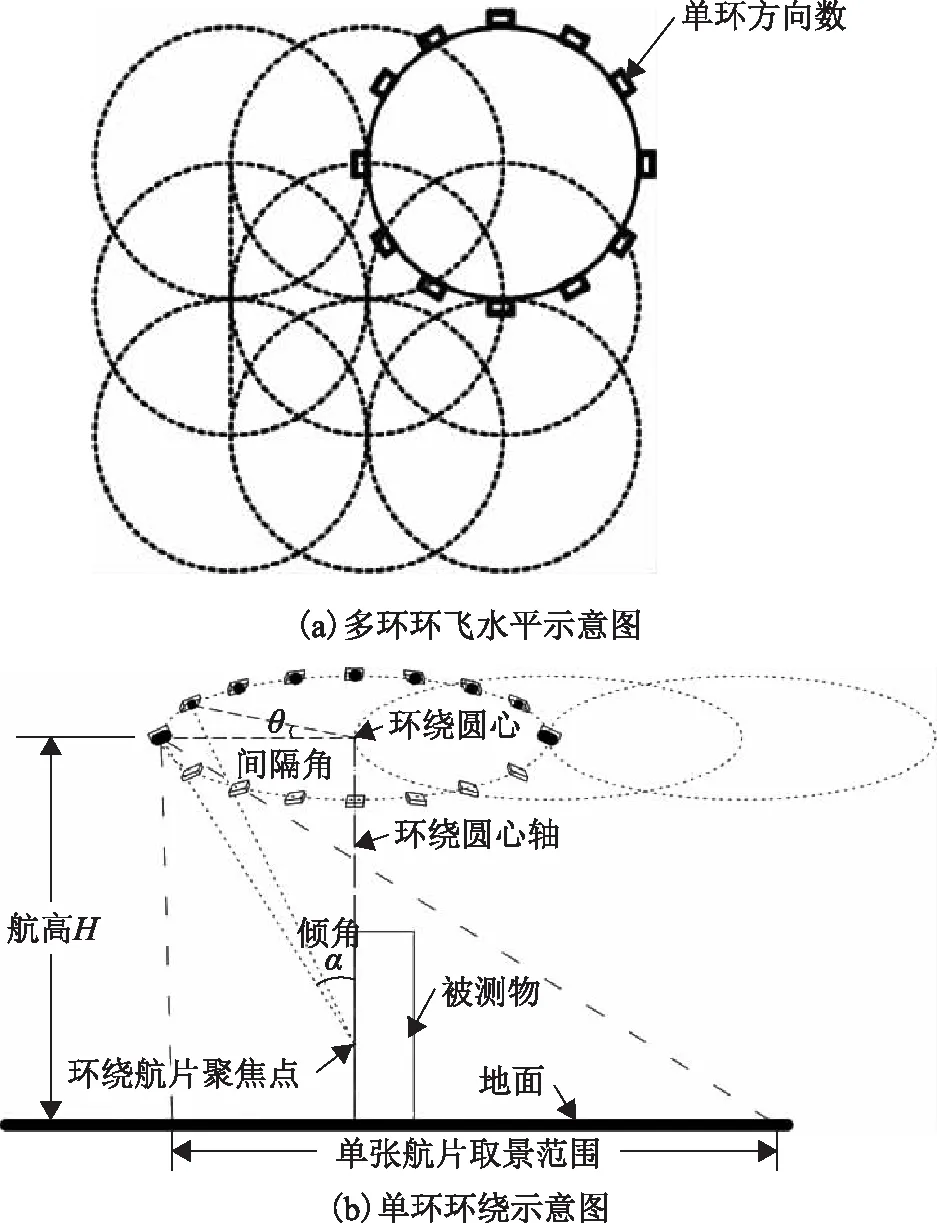
图3 平面多环交叉航摄示意图
1.6 立面弓形贴面环拍技术
立面弓形贴面环拍方案是一种针对异形单体建筑物测量的高效航摄方式,是水平五架次弓形航摄方式的空间转换(图4)。根据单体异形建筑区域范围、建筑形状、建筑周围环境,个性化规划航摄方案,实现多空间贴面环绕航摄,异形建筑立面像片的分辨率更均匀,弥补大高差序列影像的建筑立面分辨率较差难题。
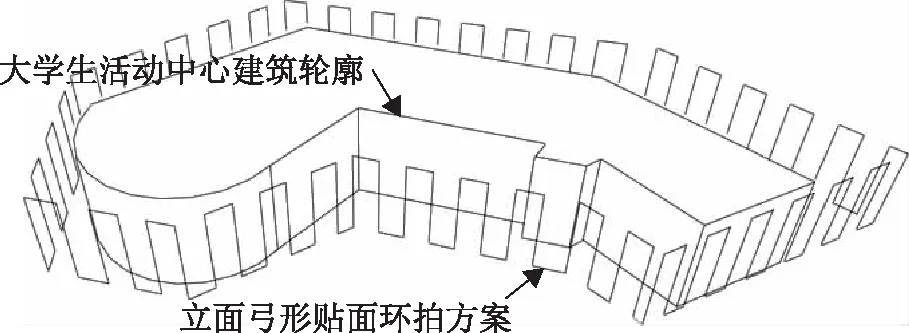
图4 立面弓形贴面环拍示意图
2 数据采集方案
2.1 实验区域及实验设备介绍
航摄实验区域为大学生活动中心和花江慧谷四创中心组成的300 m×300 m的正方形区域(图5),大学生活动中心呈现为非规整L形建筑(图6),一侧设计了半径为10 m的圆形演艺厅,与建筑主体具有明显的楼层高差,另一侧设计了不超10°的偏主体五层建筑工作区。建筑设计了边缘凸出安全楼梯通道,屋顶设计为复杂羽翼展翅形,建筑贴地部分设有反光玻璃背景连廊,为典型的异形建筑研究对象,其长为105 m,宽为60 m,高为35 m。

图5 实验区域

图6 大学生活动中心建筑
航摄实验采用消费级精灵Phantom 4 RTK无人机,其相机搭载了2 000万像素的1英寸大底索尼Exmor R CMOS传感器,采用了FOV84°、8.8 mm/24 mm(35 mm格式等效)、光圈f/2.8~f/11的广角自动对焦镜头。
2.2 航摄流程方案
实验过程中需避免阴天低光环境和大晴天高光环境,整个实验包括:实验设计、数据采集、曝光补偿、剔除过短基线航片、空三测量、模型重建、数据分析,流程如图7所示。
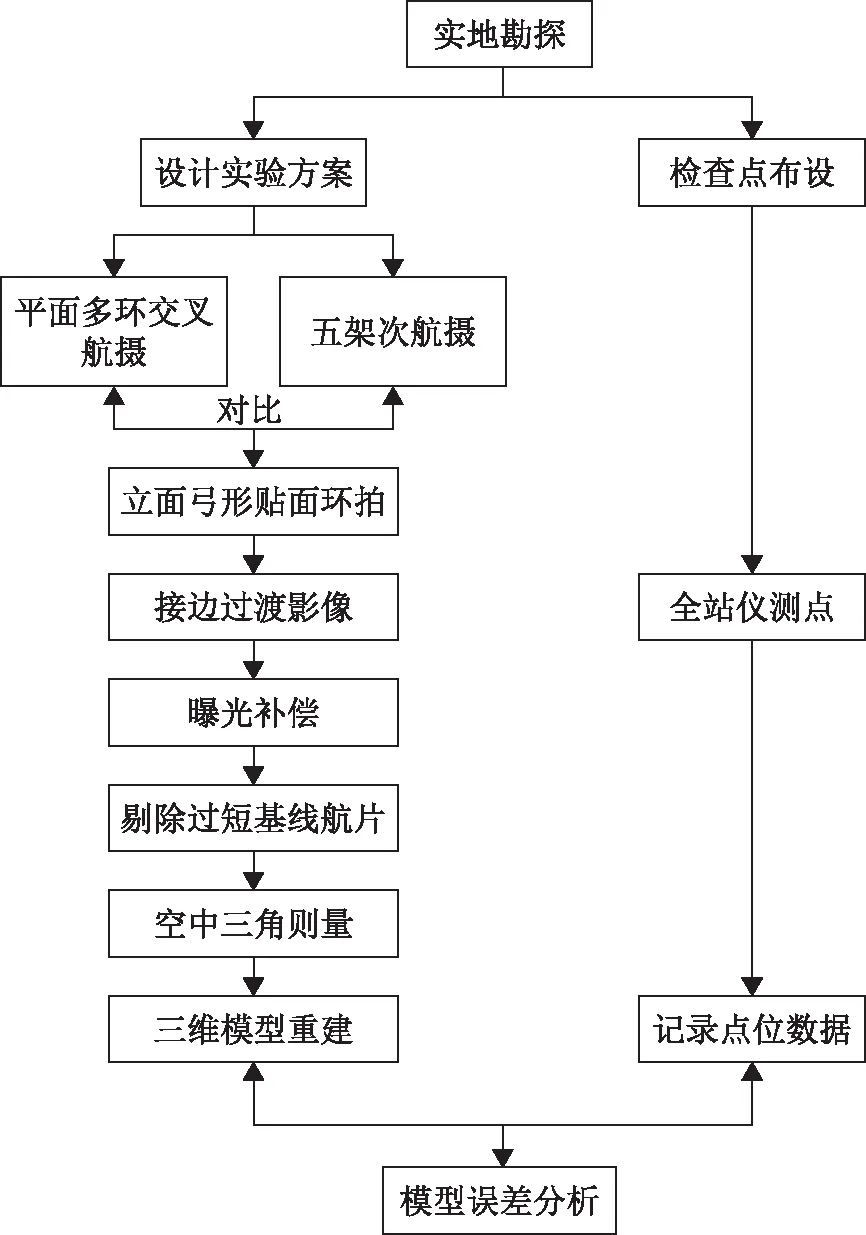
图7 实验流程
多环交叉环拍摄影会出现相邻摄站基线过短的情况,一起空三计算容易造成高程失锁错误,需要在计算之前事先消除曝光点接近的基线过短的航片,再联合进行空三测量,避免相邻摄站基线过短导致空三计算出现高程失锁错误。
2.3 两种高空航摄方案
根据测区建筑环境,设计多环交叉环拍航摄和五架次弓形交叉航摄,高度为120 m,拟圆飞行半径为120 m,间距为37%,无人机相机倾角为45°,单圆方向数为16,飞行速度为15 m/s。五架次航摄航向重叠度为75%,旁向重叠度为70%,无人机相机倾角为45°,飞行速度为15 m/s。
2.4 建筑立面弓形贴面环拍航摄
依据大学生活动单体异形建筑外形(图8),设置了拟建筑立面走势的弓形贴面环拍航摄方案,拍摄距离为10 m,航向重叠度80%,旁向重叠度为70%,最大高度40 m,最小高度为3 m,无人机相机倾角为0°,飞行速度为10 m/s,航摄耗时1 239 s。
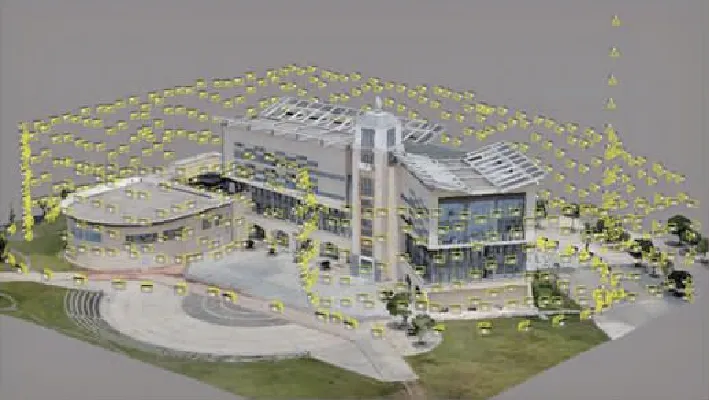
图8 建筑立面弓形贴面环拍航摄
2.5 大高差航摄分区公共接边过渡影像
高空航摄高度设定为120 m,单体异形建筑最高位像片高度为38 m,根据规范对高差的定义,本研究所涉及航空影像包含有高空水平航摄图像和低空贴面航摄图像,竖向高差已超过50 m,属于大高差影像。保证两组像片能够正常空中三角测量,航摄分区公共接边过渡影像间的重叠度系数设置为0.9,根据式(2)与式(3),在大高差航摄分区设置单列公共接边过渡影像,过渡区域共拍摄了20张倾角90°过渡影像。为增加倾角90°过渡影像与倾角0°贴面环拍的影像间的同名点,在最后一张过渡影像的高度位置拍摄定点交向影像,即从90°至0°之间每隔10°拍摄一张影像,共计8张影像。
3 实验结果
对多环交叉环拍航摄与五架次弓形交叉航摄的实验结果进行预对比,根据对比结果再实现高空多环交叉环拍、弓形贴面环拍以及航摄分区公共接边过渡影像三组像片融合,完成大学生活动中心单体异形建筑的三角网格、DSM白膜和三维实景模型重建(图9)。
3.1 航摄效率与重建模型细节分析
外业数据采集工作效率注重无人机航摄耗时,内业工作效率则注重三维模型重建耗时[14]。如表1所示,分别统计了高空两种航摄的耗时。
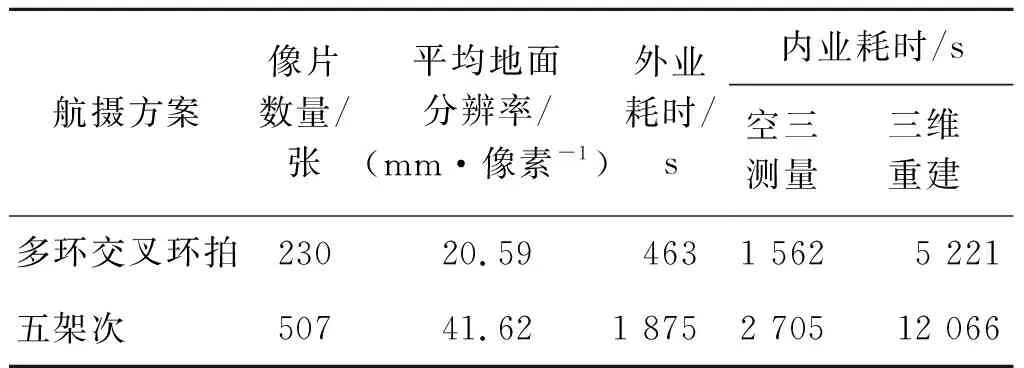
表1 航摄建模效率对比
根据数据分析,多环交叉环拍航摄方案像片数量明显少于五架次航摄方案;前者平均地面分辨率优于后者;前者外业耗时亦远远少于后者外业耗时,多环交叉环拍航摄方案外业效率可观;内业耗时方面,前者三维重建所需时间远少于后者三维重建时间,内业重建效率有明显的差异。
针对两种方案的结果进行分析(图10),对比建筑立面与地面植物较近区域建模效果,前者方案建筑立面与地面植物没有出现重合,三维模型孤立,效果良好,后者建筑立面和地面植物已经贴合,建模效果差;异形建筑遮挡面建模效果对比方面,后者航摄方案下出现了大面积扭曲、立面线条模糊,相比之下,前者航摄方案下,立面层次分明。由此,多环交叉环拍航摄方案优势更高,在大面积城市航摄工作中采用多环交叉环拍航摄方案更能满足航测采集工作的需求。
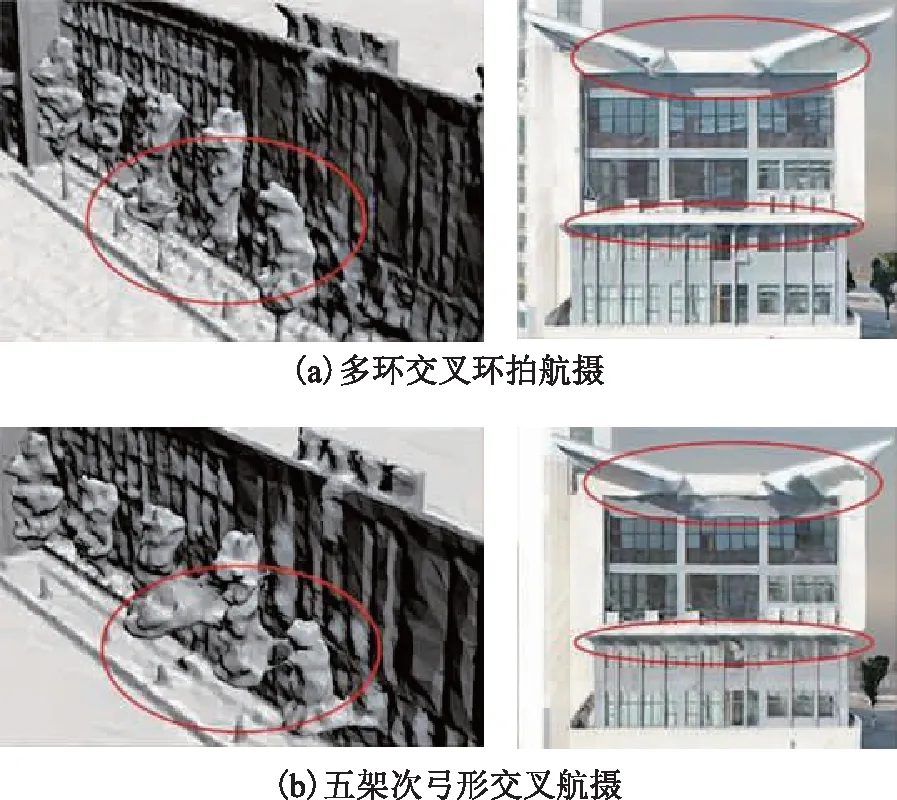
图10 两种方案模型对比
3.2 单体异形建筑模型细节对比分析
融合弓形贴面环拍以及航摄分区公共接边过渡影像三组像片后效果如图11所示。融合后单体建筑立面的细节精度与纹理质量都有很大提升,且融合后建筑纹理色彩相对均匀,异形建筑连廊通透性好,未出现模型扭曲阻塞,建筑异形屋檐模型条理清晰,建筑高反光幕墙立面建模效果较好,异形建筑整体模型精度有所提高。
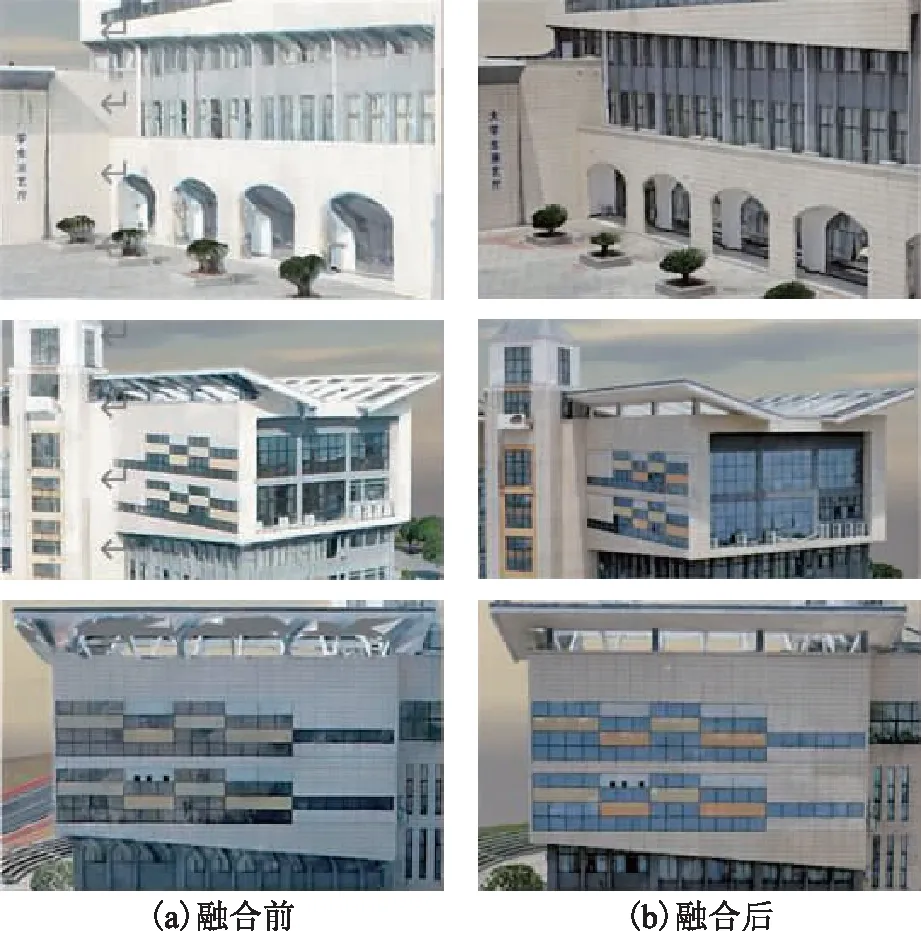
图11 融合前后模型对比
3.3 建筑模型免像控精度分析
数据精度分析是评价一个建筑质量的重要指标[15],单体异形建筑精度分析需设计平面精度分析以及高程精度分析、对单体异形建筑立面设立的检查点进行计算统计。平面及高程精度计算参见文献[16]。
根据选取10个检查点的实测值与模型上量取的坐标值计算获取融合前(表2)与融合后(表3)的精度统计数据。
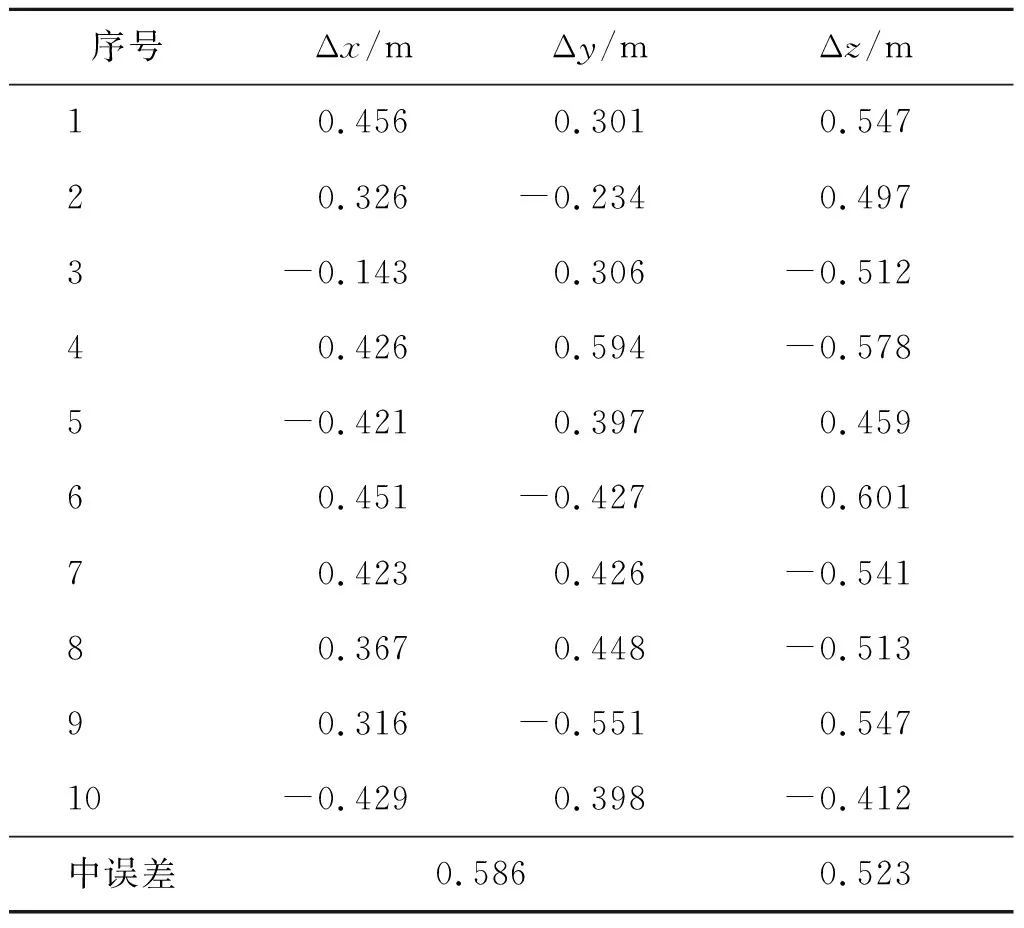
表2 融合前模型三维精度统计
从表3可知,融合高空多环交叉环拍、弓形贴面环拍以及航摄分区公共接边过渡影像三组像片后重建的单体异形建筑整体模型精度较高,融合后的精度较高于精细化建筑模型精度要求。上述精度数据分析表明,采用该融合式航摄方案可以获取高精度单体异形建筑精细化三维模型,满足城市三维模型建模精度需求。
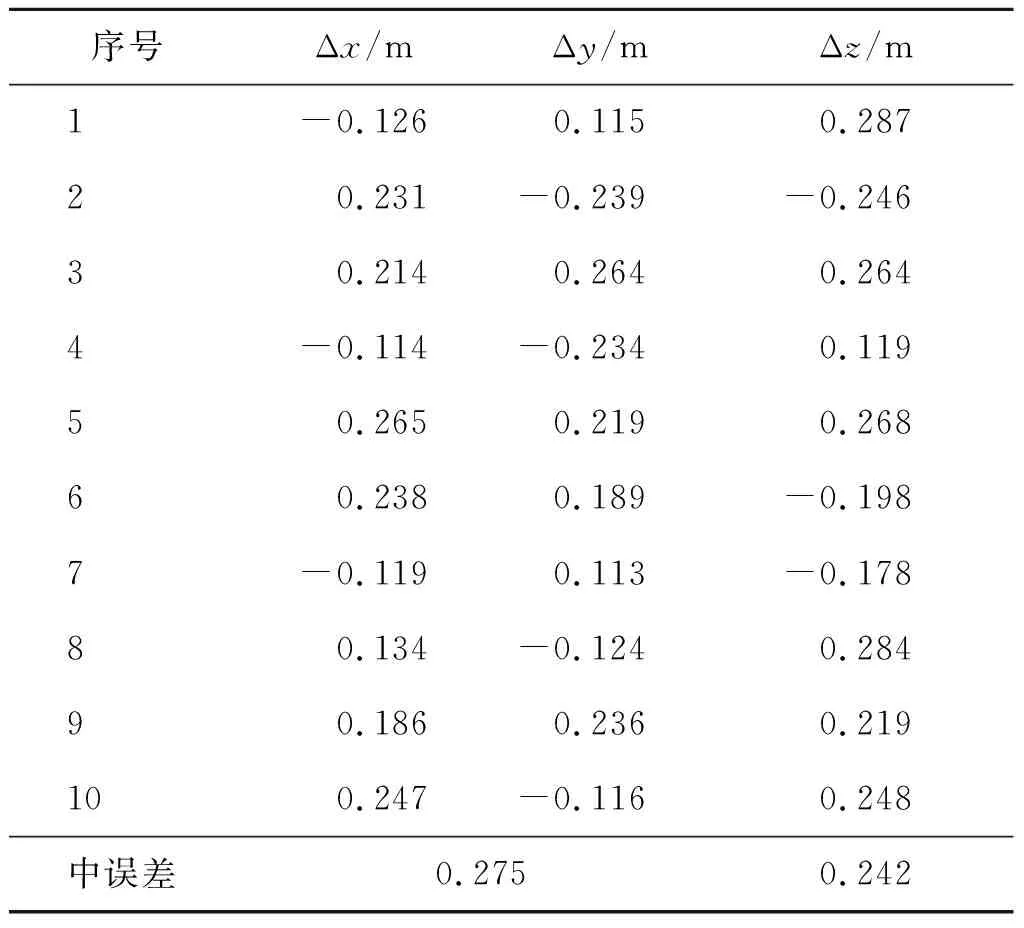
表3 融合后模型三维精度统计
4 结束语
本研究从工作效率和模型细节完整度方面分析了多环交叉环拍航摄和五架次弓形交叉航摄两种航飞方案,并提出一种基于消费级无人机大高差影像序列融合的单体异形建筑免像控建模方法,设计了航摄分区公共接边过渡影像搭桥融合大高差的高空多环交叉环拍像片与弓形贴面环拍航摄像片,完成区域大高差序列影像实景建模和单体异形建筑精细化模型重建工作,得出以下结论。
1)针对工作效率而言,在免像控基础下,同比常规的五架次航摄方案,多环交叉环拍航摄方案不仅重建模型质量较高,而且外业和内业工作效率明显高于五架次航摄。
2)在大高差环境下,可融合较少的航摄分区公共接边过渡影像,避免大高差影像无法匹配问题,并且融合后模型建模效果良好。
3)采用高空多环交叉环拍方式融合弓形贴面环拍航摄以及航摄分区公共接边过渡影像,可在大高差环境下高效完成单体异形建筑的精细化模型。
本文方法研究表明,所提出的大高差环境下的免像控的单体异形建筑建模方法,可根据实地航测区域环境制定高效的航测采集方案,使用较少的航摄像片完成精度较高的城市实景三维模型重建工作,能有效面对当代大城市环境下发展快、异形建筑多的趋势,顺应城市信息模型基础平台建设发展。
猜你喜欢
煤气与热力(2021年10期)2021-12-02 05:11:52
装饰装修天地(2020年11期)2020-07-04 03:09:19
建材发展导向(2019年5期)2019-09-09 09:22:12
环球时报(2019-03-28)2019-03-28 04:23:42
铁道勘察(2018年5期)2018-10-22 06:12:00
现代测绘(2018年3期)2018-09-13 09:34:46
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
华西口腔医学杂志(2017年3期)2017-03-02 03:43:21
星星·散文诗(2015年34期)2015-10-26 19:25:18