面向对象卷积神经网络的耕作梯田提取
2022-08-18 08:53周珏李蒙蒙汪小钦吴思颖金时来
遥感信息 2022年2期
周珏,李蒙蒙,汪小钦,吴思颖,金时来
(1.福州大学 空间数据挖掘与信息共享教育部重点实验室,福州 350116;2.福建省水土保持试验站,福州 350003)
0 引言
南方多山地区耕地资源相对不足,特别是在素有“八山一水一分田”的福建地区。耕作梯田的建造可有效扩展农耕面积,提高作物种植产量[1]。此外,耕作梯田也是控制水土流失的有效工程措施之一,且对生态系统具有良好的促进作用[2]。因此,准确地掌握耕作梯田的空间分布情况对农业管理和水土保持部门开展科学的决策支持具有重要意义[3-4]。
随着遥感技术的发展,基于遥感影像分类的耕作梯田信息提取备受关注。近年来,高空间分辨率卫星技术的快速发展,众多在轨的高分辨卫星,如WorldView、GeoEye、Pleiades等,为耕作梯田的精细提取提供了海量高分辨率遥感数据[5]。南方地区耕作梯田分布较为破碎和分散,作物种植种类较多、种植结构复杂,不同作物生长物候信息差异较大,使得高精度的耕作梯田精细识别较为困难[6]。高分辨率遥感影像具有丰富的空间细节信息,但光谱波段较少。常规的高分辨率影像耕作梯田提取多采用面向对象分析方法,通过提取影像对象的光谱、纹理、形状等特征进行图像分类[7-8]。
近年来,基于深度学习的遥感图像分析方法在各种遥感信息提取任务中获得了成功应用[9-11]。其中以卷积神经网络为代表的深度学习模型,由于强大的深层图像自动提取能力,被广泛应用在高分辨率遥感图像分类任务中。针对耕作梯田信息提取,杨亚男等[12]利用无人机遥感影像,构建深度学习模型,使用语义分割的方法在像素级上提取了黄土高原丘陵区典型的梯田。Do等[13]利用RapidEye作为数据源,利用深层神经网络模型提取梯田,基于像素和面向对象提取的总体精度均高于85%。
通常,基于卷积神经网络的影像分类对目标类别的边界描绘不足,存在边界锯齿状明显的问题。结合面向对象分析思想,目前有学者以图像对象为基本分析单元,利用卷积神经网络提取图像对象的深层图像特征进行图像分类[14-15]。例如Huang等[16]构建了一个面向对象的卷积神经网络用于高分辨率影像城市土地利用分类,Tang等[17]研究利用面向对象神经网络进行高分辨率影像茶园提取。但目前基于深度学习的高分辨率遥感影像梯田空间分布精细提取研究相对较少,特别是针对中国南方多山的地形区域。本研究基于国产高分辨率遥感数据,通过构建一个面向对象的卷积神经网络,开展福建地区耕作梯田精细提取,针对高分辨率影像耕作梯田训练样本难获取的问题,利用迁移学习对面向对象卷积神经网络进行参数优化,提高耕作梯田提取精度。
1 材料与方法
1.1 研究区概况
研究区位于福建省南平市浦城县和武夷山市交界处(117°12′E~119°12′E,26°14′N~28°02N)。该区域处于福建省北部,西接江西省,北邻浙江省,山脉大致呈东北—西南走向,中部与南部以低山丘陵为主,地形以山地丘陵为主,梯田分布广泛[18]。该区域具有亚热带季风气候,降雨充沛,独特的气候环境和地形特征造就了该地梯田生态和梯田农业的发展,其中具有“万亩梯田”美誉之称的枫溪梯田也位于研究区内。
1.2 数据来源
本研究选择一景2018年4月19日获取的高分二号(GF-2)遥感影像和一景2019年11月24日获取的资源三号(ZY-3)遥感影像。GF-2卫星是我国自主研制的首颗空间分辨率优于1 m的民用光学遥感卫星,搭载有两台高分辨率1 m全色、4 m多光谱相机,具有亚米级空间分辨率、高定位精度和快速姿态机动能力的特点[19]。ZY-3卫星搭载了3台全色和1台多光谱相机,其空间分辨率为2.1 m,其光谱分辨率为5.8 m,重访周期为5 d。利用ENVI软件对获取的GF-2和ZY-3影像进行数据预处理,主要操作包括正射校正和Gram-Schmidt影像融合。
1.3 研究方法
本研究结合面向对象分析和卷积神经网络,构建一种面向对象卷积神经网络(object-based convolutional neural networks,OCNN)进行高分辨率遥感影像梯田提取,技术路线如图1所示。首先,对高分辨率遥感影像(GF-2和ZY-3影像)进行图像分割获得图像对象;然后,利用OCNN提取影像对象的深层图像特征;最后,基于对象的深层图像特征,利用机器学习分类器进行梯田分类以及精度评价。
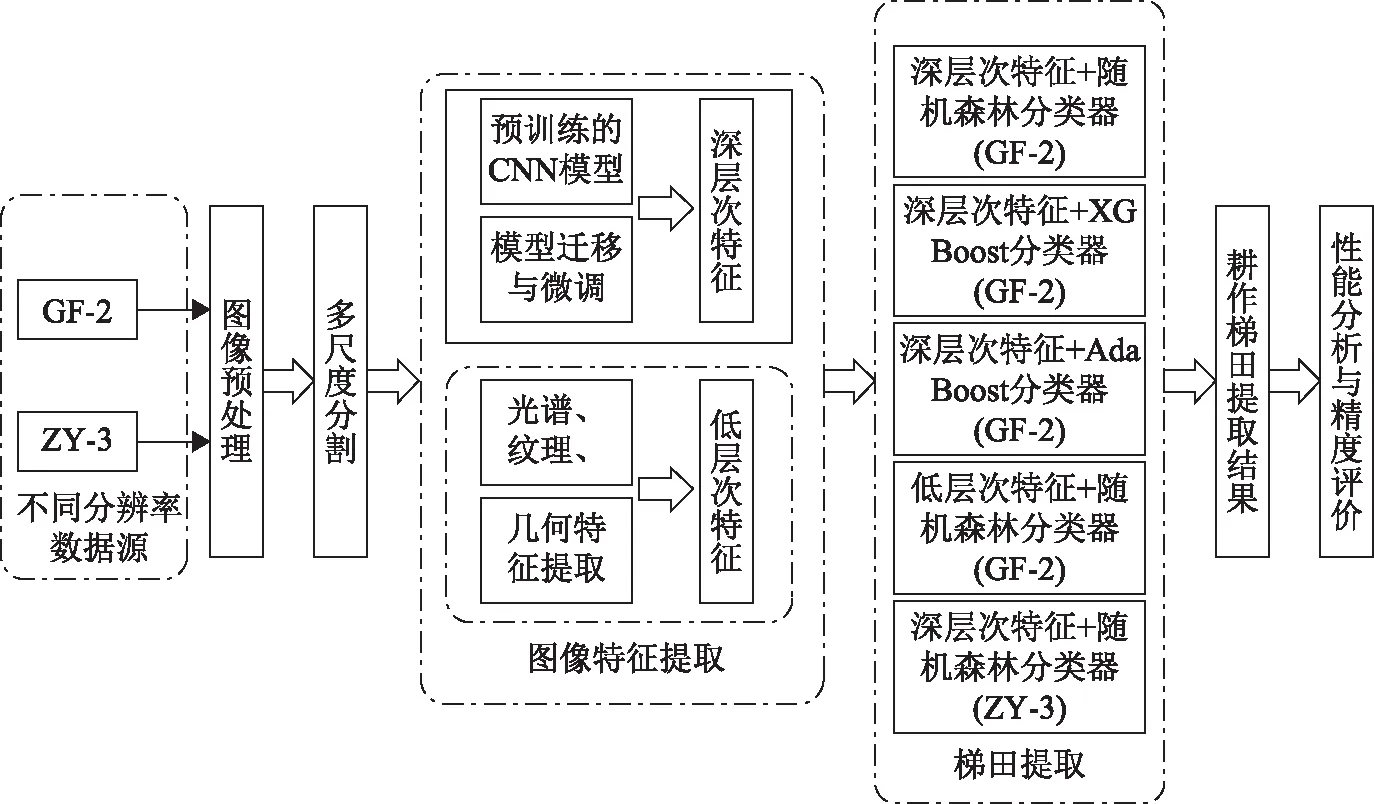
图1 技术路线图
1)图像分割。本文利用多分辨率分割算法进行影像分割,考虑到耕作梯田有明显覆盖物,边缘模糊不规则,为了保证较好的对象内部同质性和对象间异质性,形状因子和紧致度因子均设为0.5。为了获得耕作梯田的最优分割尺度,采用试错法,对比分割尺度为100、130和150的分割效果,通过目视解译确定最优分割尺度。
2)深层特征提取。深层次特征主要是提取适用于目标域的高层次语义特征,越高层特征包含的高层语义性越强、分辨能力也越强,抽取的特征也越来越全局,也越来越针对目标域所训练的数据集[20]。针对高分辨率遥感影像训练样本难获取的问题,可以将经过自然图像数据集训练的卷积模型应用于遥感图像领域进行特征提取。本文采用基于卷积神经网络的模型迁移,将在ImageNet数据集上训练至收敛的ResNet50为基础网络进行微调,提取分割对象的深层次特征,具体步骤如下。
步骤1:样本收集与数据增强。通过目视解译的方式选取不同类型的样本对象,包括耕作梯田样本301个,非耕作梯田样本267个,用仿射变换和颜色变换两种方式对样本数据进行数据增强,共扩充了11倍,样本集从原本的568个扩充到6 248个。
步骤2:基于在ImageNet数据集上训练收敛的ResNet50模型,移去作为分类使用的最后一次全连接层,对ResNet50模型进行冻结和微调。
步骤3:将裁剪过后的影像对象作为模型的输入,得到各个对象的2 048维的深度卷积特征。
3)梯田提取。由于特征维数大、训练参数多,在研究区小样本的情况下,直接使用用于地物分类的Softmax分类器会导致模型过拟合严重,无法较好地实现地物分类[21]。机器学习算法具有快速处理高维且大量的数据,对过拟合问题不敏感和分类精度高等优点,被广泛应用于遥感领域。基于高维深层图像特征,本文利用机器学习分类算法进行耕作梯田提取,设置了三组对比实验。
(1)对比OCNN与传统面向对象分类方法。基于图像分割结果,选取40个常用的光谱、形状、纹理等低层级图像对象特征(表1),利用随机森林进行图像分类。

表1 低层级图像特征
(2)基于深层图像特征,对比随机森林、XG Boost、Ada Boost三种不同机器学习分类器的耕作梯田分类效果。
(3)对比不同分辨率数据源(GF-2和ZY-3影像)对OCNN梯田提取结果的影响。
4)精度评价。首先基于混淆矩阵,通过计算总体精度、误提率、漏提率以及Kappa系数等指标对耕作梯田的提取结果进行精度验证。除此之外,为了对所提取耕作梯田的形状与属性的准确性进行评价,利用Li等[22]提出的基于面向对象的加权误差指数的精度评价方法对耕作梯田识别结果进行精度评价。其中,GUC为总体欠提取误差指数,GOC为总体过提取误差指数,GTC为全局误差指数。
2 结果与分析
2.1 图像分割
利用eCognition软件对预处理后的遥感影像进行分割,不同分割尺度的结果如图2所示。图2表示不同分割尺度下的分割结果,分割尺度为100时,图2(a)影像出现明显过分割现象,梯田地块过于破碎,分割尺度为150时,图2(c)中影像出现了欠分割现象,单个分割对象包含小块耕作梯田与林地两种地物类型,容易出现误分或者漏提的现象。不管过分割还是欠分割现象的出现,都会对耕作梯田提取效果产生一定的影响。通过对比不同分割尺度下耕作梯田与其他地物的分离情况,确定以130作为耕作梯田提取的最佳分割尺度。在该尺度下,耕作梯田可以有效地与其他地物分离,各地物边界清晰,同时又能较好地保持梯田地块边界完整,有助于梯田特征的提取。
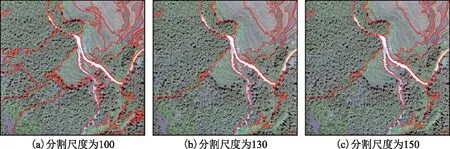
图2 不同分割尺度对比图
2.2 耕作梯田提取结果对比
1)深层次特征与低层次特征对耕作梯田提取结果的对比。通过对比提取效果差异较大的典型区域(图3),利用深层次特征提取结果能有效减少背景地物(如居住用地、道路、果园等)的干扰,可以较好地还原耕作梯田的边界范围和结构特征,而低层特征提取结果在该地区出现了大量的误提,道路、建筑物和部分林地被误提为耕作梯田。图3(a)与图3(b)内地物较为复杂,包含建筑、林地、平地农田以及耕作梯田等,低层次特征的提取结果将大片平地农田误提为耕作梯田,也会误提部分与农田相连的建筑。图3(c)包含大量典型耕作梯田,从图中
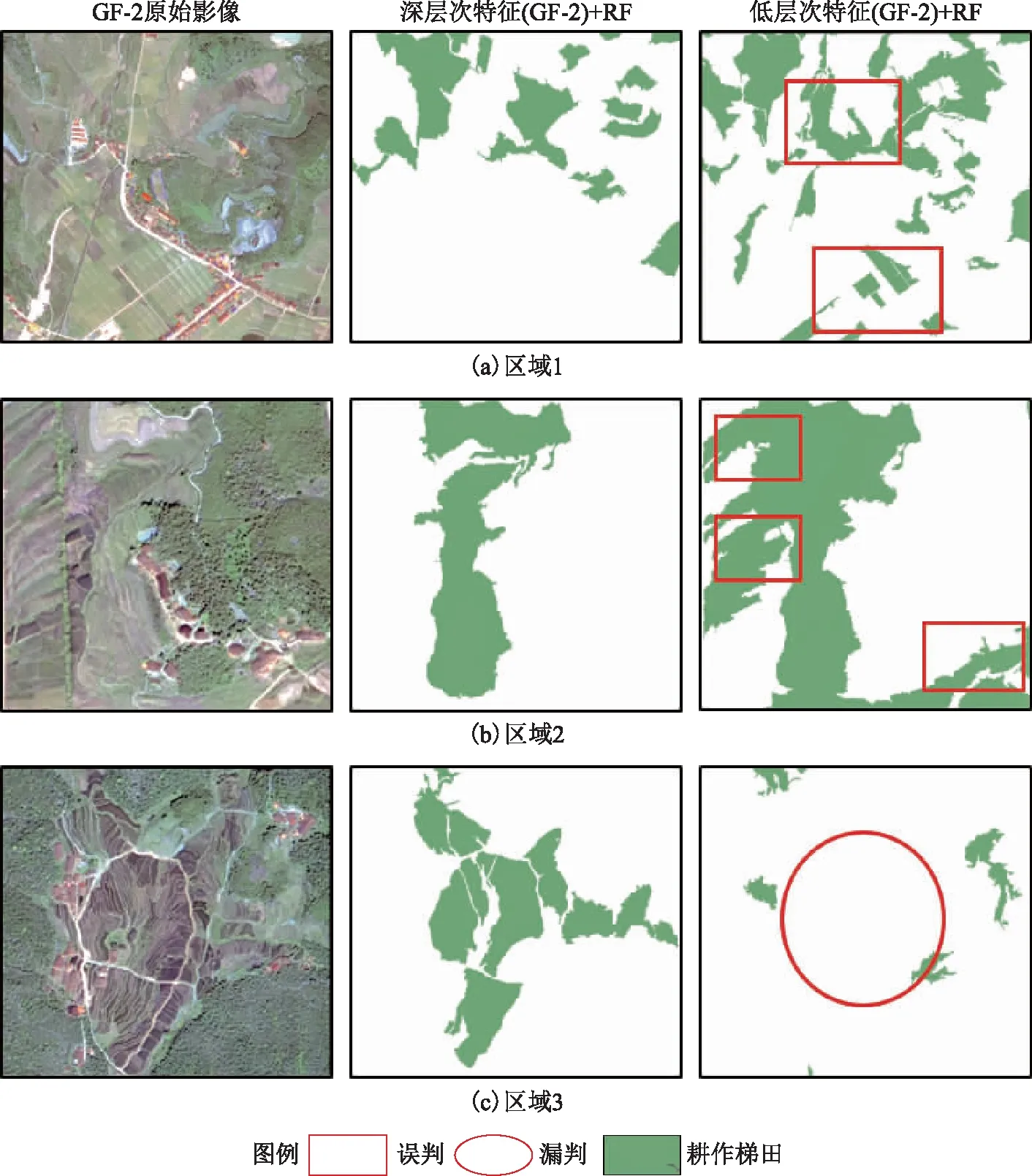
图3 低层次特征与深层次特征提取结果对比图
可以看出,利用深层次特征的提取结果可以较好还原耕作梯田的边缘形状,低层次特征提取效果较差,出现大面积耕作梯田漏提现象。利用深层次特征识别的总体精度为87.1%,利用低层次特征识别的耕作梯田精度为76.9%,与深层次特征相比,降低10.2%。由此可见,传统的遥感影像分类方法的特征提取能力有限,无法充分利用高分辨率遥感影像中丰富的信息。深度卷积特征相比于传统低层次特征,能够在小样本的情况下,避免出现过拟合,可以达到较高精度。
2)不同分类器对耕作梯田提取结果的对比。通过对比提取效果差异较大的典型区域可知(图4),不同分类器结合提取的耕作梯田结果相似,都能较好地将梯田提取出来。但从图4(a)可知,XG Boost和Ada Boost分类器会出现小部分耕作梯田漏提现象。从图4(b)可知,由于茶园梯田与耕作梯田光谱、纹理和轮廓相似,这三种分类器都存在小部分将茶园梯田误提成耕作梯田的现象。不同机器学习分类器精度相差不超过2%,说明这三类分类器不是影响耕作梯田提取的关键因素。
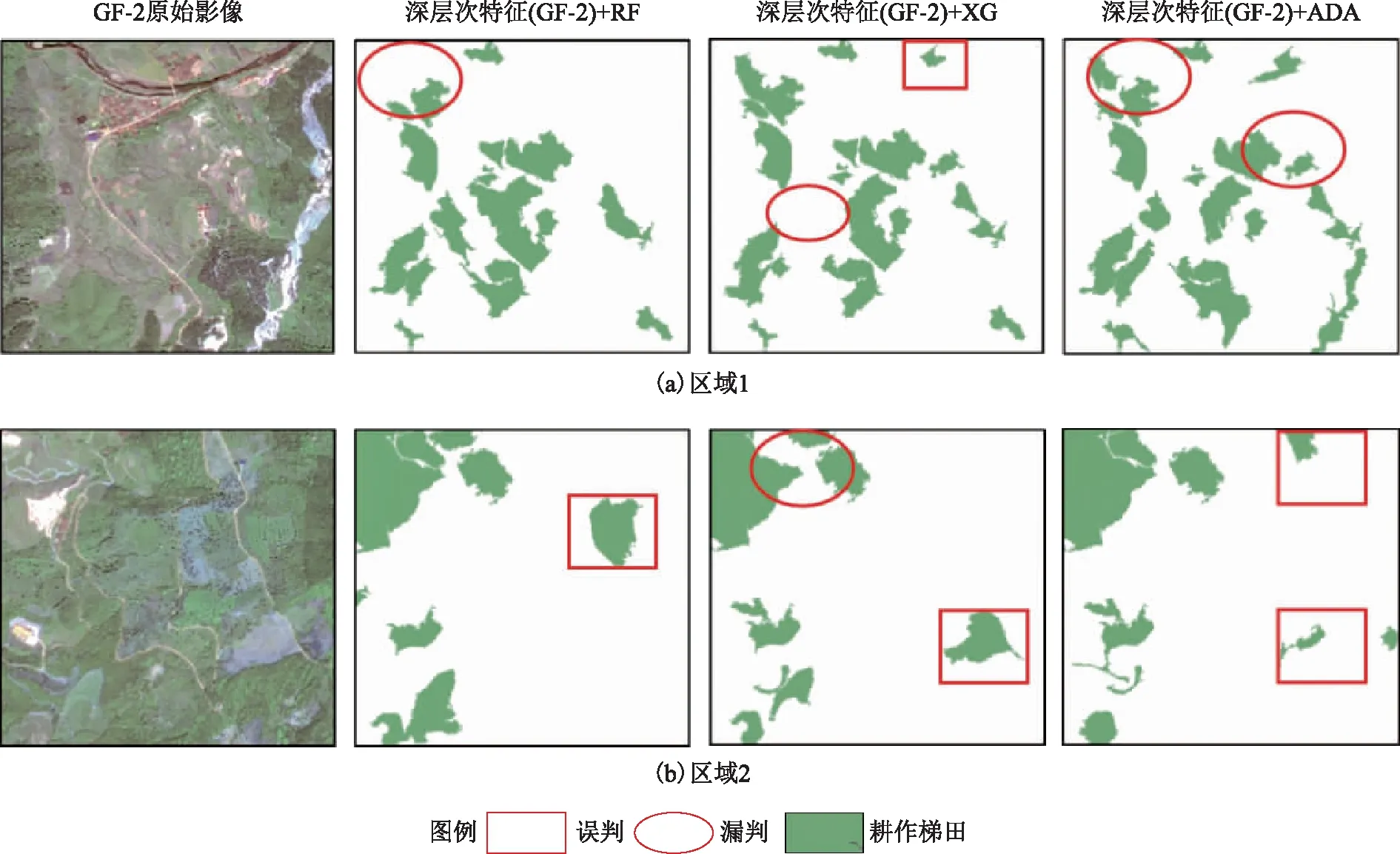
图4 不同分类器提取结果对比图
3)不同分辨率数据源对耕作梯田提取结果的对比。本文利用同区域的ZY-3遥感影像数据(2.1 m),使用此方法进行提取,并与GF-2梯田提取结果进行对比。ZY-3影像根据目视解译发现梯田虽仍能识别,但是与GF-2影像对比,耕作梯田的纹理特征不明显,形状指数不突出。通过对比提取效果差异较大的典型区域可知(图5),利用ZY-3数据可以提取大部分耕作梯田,但是会误提小部分与梯田相连的平地农田。GF-2影像作为数据源提取结果较ZY-3(2.1 m)精度提高4.6%,Kappa系数提高5.2%。GF-2影像分辨率高,在图像识别上有巨大优势,如果研究区范围小、数据精度要求高的情况,可以选择GF-2数据进行耕作梯田识别;针对范围较大,数据精度要求低的研究,可以使用ZY-3数据进行识别,精度也能达到82.5%,再结合人工目视解译进行修正,也基本满足一般研究需求。
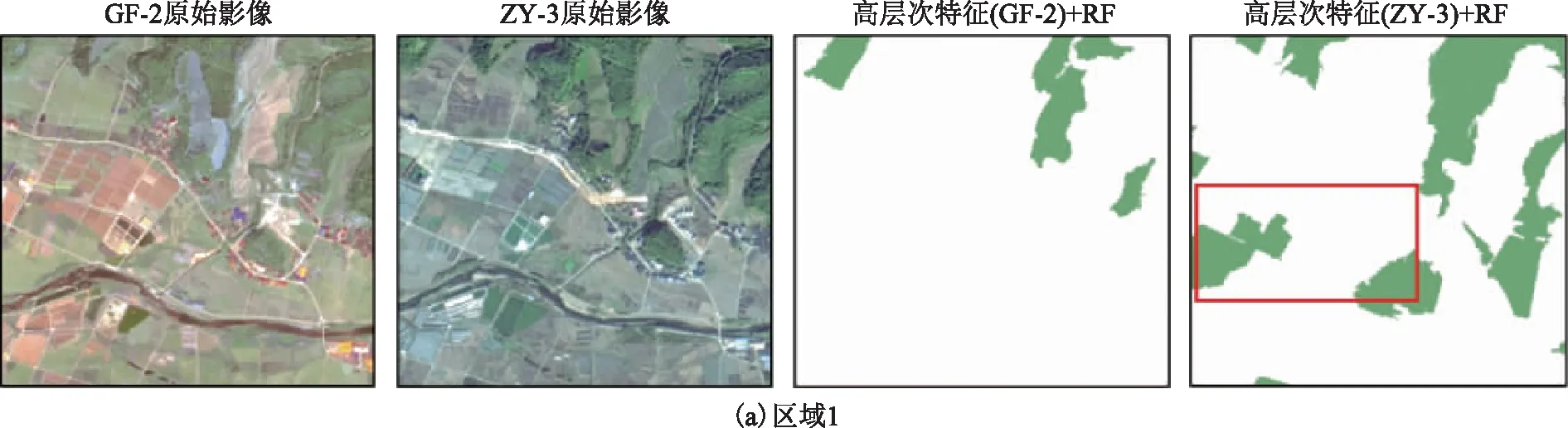
图5 不同分辨率数据源提取结果对比图
2.3 结果分析与精度评价
通过目视解译和实地考察选取实际梯田的验证样本点作为评价样本。精度验证主要考虑两个方面:一方面是利用耕作梯田点位验证提取结果中正确提取的点位个数;另一方面是提取结果中对非耕作梯田地物的误提情况。由以上三组对比实验可知,基于GF-2数据利用面向对象的卷积神经网络的方法提取深层次特征,再结合随机森林分类器的精度最高,总体精度为87.1%,Kappa系数为0.76,虚提率为11.9%,漏提率为14.2%。通过将遥感影像图、提取结果和实地考察照片对比可知(图6),此方法能提取出大部分耕作梯田,同时居住用地、道路、果园等被有效剔除,提取结果并没有受到“异物同谱”和“同物异谱”现象的影响,没有明显的错分和漏分。对于光谱信息比较相近的地物,如果园、茶园、林地等也能进行区分,有较高的识别精度,且可以有效地克服模型过拟合严重的问题。
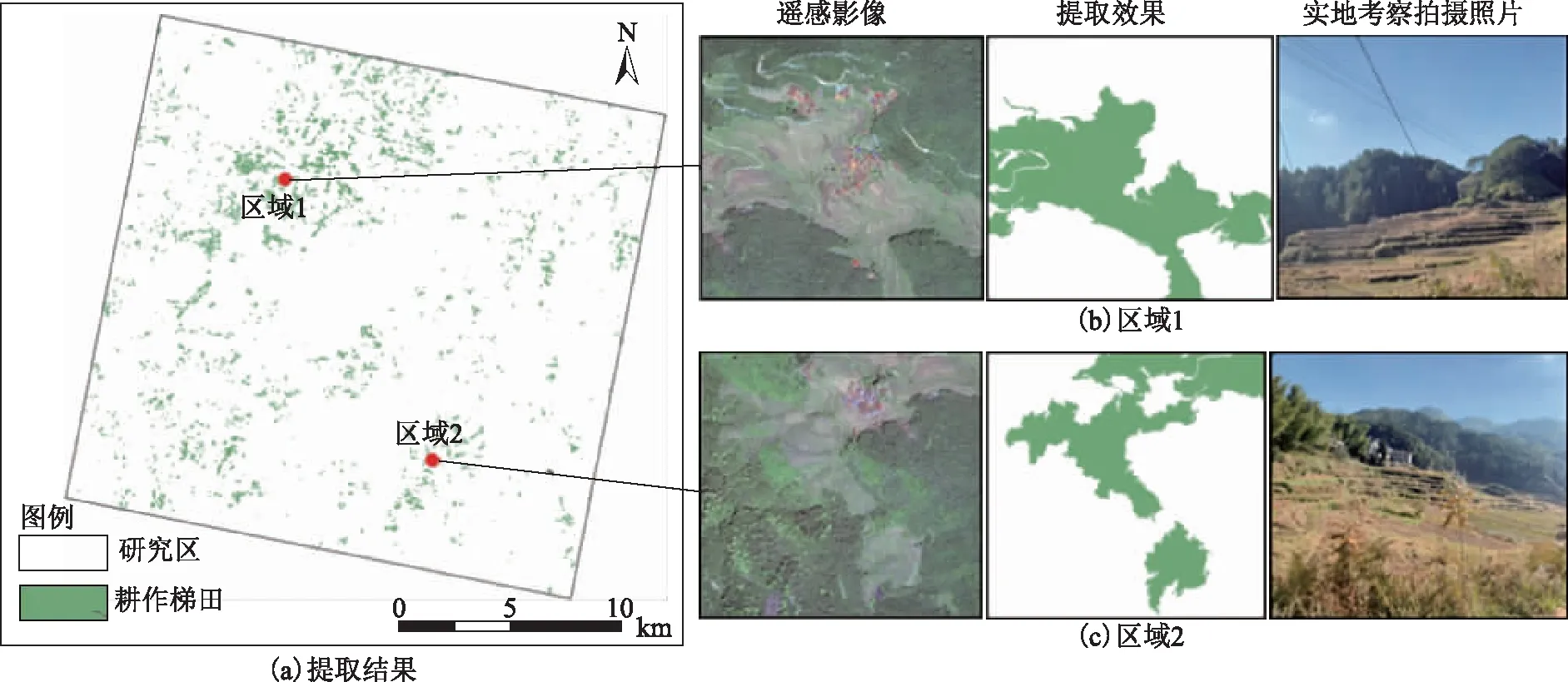
图6 梯田提取结果
为了评估面向对象分割的精度,本文选取研究区内耕作梯田面积占比较大的小块区域用于精度验证,通过计算加权的过提取和欠提取误差指数可以得到基于面向对象的精度评价的欠提取误差指数GUC为0.195、过提取误差指数GOC为0.306、全局误差指数GTC为0.265。从面向对象的精度评价指数结果可以看出,全局误差指数较低,虽然耕作梯田形状不规则,但整体误差小于0.3,说明此方法可以有效地提取耕作梯田,可以提取大部分的梯田的形状,边缘还原较好。
3 结束语
本文基于高分辨率遥感影像利用面向对象的卷积神经网络提取耕作梯田,并研究对比低层次特征与深层次特征、不同分类器以及不同分辨率数据源对提取效果的影响,主要结论如下。
1)基于GF-2遥感影像,构建了一个面向对象的卷积神经网络模型对耕作梯田进行提取,总体精度达到87.1%,Kappa系数0.76,虚提率为11.9%,漏提率为14.2%,利用面向对象精度评价方法得到全局误差指数GTC为0.265。所提出方法可以降低目标域数据集的数量要求,省时省力,说明该方法在高分辨率提取耕作梯田的分布信息以及形状完整性方面具有广阔的应用前景。
2)与传统的低层次视觉特征相比,深度卷积特征可以有效避免人为因素干扰且提高了提取的精度,且精度提高10.2%,说明该方法具有较强的鲁棒性,能应用于大面积的耕作梯田提取任务。
3)不同的机器学习分类器对于耕作梯田提取效果差别不大,随机森林算法的精度略高于XG Boost和Ada Boost,但精度相差未超过2%,说明这三个分类器对于耕作梯田提取影响不大。
4)本文分别利用GF-2数据与ZY-3(2.1 m)数据提取耕作梯田并进行比较,利用GF-2数据提取结果精度提高4.6%。越高分辨率遥感影像上耕作梯田的尺寸、形状、结构与邻域关系都得到更好的反映,内部组成要素丰富的细节信息可以更好地得到表征,利用此方法可以很好地挖掘高分辨率遥感影像的特征,分辨率越高,提取效果越好。GF-2影像分辨率高,在图像识别上优势明显。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
山东农机化(2022年1期)2022-03-05
中国土壤与肥料(2021年5期)2021-12-02
雷达学报(2020年3期)2020-07-13
电子制作(2019年7期)2019-04-25
中国工程咨询(2017年7期)2017-01-31
太空探索(2015年8期)2015-07-18
中国交通信息化(2015年6期)2015-06-06
浙江大学学报(工学版)(2015年1期)2015-03-01
航天返回与遥感(2014年4期)2014-07-31