
自动紧急制动下乘员坐姿对离位的影响
2022-08-16 02:27王占宇沈亚敏
重庆理工大学学报(自然科学) 2022年7期
王占宇,沈亚敏
(东北林业大学 交通学院,哈尔滨 150040)
0 引言
道路交通事故是造成人类社会经济、健康负担的重要因素,世界各国和地区的人民为预防交通事故保障人车安全做出了巨大努力。研究表明,主动安全技术的引入在降低车辆之间的事故率、减轻事故的严重程度起了重要作用。在发生碰撞前,主动安全系统的介入会对车辆进行紧急操控,导致接管后的车辆运行工况会忽视乘员的感受,使得乘员坐姿姿态产生巨大的变化,因此极易发生乘员的碰撞损伤[1-2]。
在未来自动驾驶的环境中,乘员的坐姿追求越来越舒适、方便,一旦出现紧急制动后再发生碰撞事故,不同坐姿下的乘员受惯性的影响产生离位位移后,极易出现与安全带、安全气囊等约束系统部件触发不匹配的现象,这会对乘员带来较大的损伤风险,因此需要进行约束系统优化,实现与智能车辆的对接。
安全带是车辆约束系统中最重要的乘员健康保护设备。在使用安全带时,大约45%的安全带可有效防止致命伤害,67%的安全带可有效防止严重损伤[3]。为了解决主动安全系统造成的乘员离位影响,国外学者做了大量的实验和仿真模拟研究,发现在给安全带施加主动预紧可以有效的消除安全带与乘员之间的间隙和织带的松弛,减小乘员在紧急制动工况下因惯性导致的离位位移[4-5]。Reed等[6]研究在事故发生前,汽车主动系统的突然紧急制动和变向会导致乘员头部位置大范围的变动,这会加大碰撞时的乘员受伤风险。Battaglia等[4]将AEB介入后的追尾碰撞与普通的追尾碰撞比较,发现AEB在碰撞前会造成乘员的离位现象,导致乘员受到较严重的挥鞭伤。
国内在针对主动预紧式安全带方面的研究上,曹立波等[7-8]建立主动预紧式安全带与自动紧急制动相结合的仿真模型,对主动预紧式安全带降低乘员损伤的保护性能进行了仿真研究;Song等[9]在试验台架上进行安全带静态测试试验,验证了上述主动预紧式安全带系统的可行性,并分析了主动预紧式安全带的关键性能参数;吴俊等[10]研究了乘员对集成主动预紧式安全带的可接受度,从一级预紧力、预紧频次、预紧噪音值3因素来考虑,提出了提高接受度的措施。司俊德等[11]为研究约束系统对客车侧翻过程中乘客安全的影响,建立“车身截段-约束系统-乘员”侧翻仿真模型,开展不同约束条件下乘员运动响应和损伤的综合分析及评价。胥林立、胡远志等[12-13]为探究紧急制动时ACR对乘员离位现象的影响,开展了针对男性志愿者的实车道路试验,建立与其对标的仿真模型,并采用NSGA-Ⅱ对ACR参数进行优化。
以上学者对AEB与主动预紧安全带的联合作用作了大量研究,但对未来智能车上的乘员坐姿变化的安全影响分析较少。随着智能车辆的快速发展,未来乘员的坐姿会越来越舒适,乘员约束系统需要进一步优化改进。本文利用Madymo软件模拟乘员在不同坐姿情况下紧急制动造成的影响,针对乘员的离位位移进行主动预紧装置重要参数的优化,根据试验结果对不同的坐姿方式进行评价,为以后智能车辆对乘员不同坐姿的参数控制以及约束系统的设计提供参考。
1 约束系统模型建立及验证
1.1 仿真模型的建立
利用多刚体动力学分析软件Madymo依照某款车型建立了驾驶员侧约束系统仿真模型,车身模型包括地板、挡风玻璃、踏板、座椅等部件,转向系统模型包括方向盘、转向管柱,安全带模型的建立包括卷收器、主动预紧器、高度调节器、固定锚点以及带扣。建立完模型后,调入假人。在Madymo软件中有多个假人可供使用,其中主动人体模型(AHM)可以很好地模拟人体肌肉的主动行为,以此模拟乘员在制动下的动态响应。本文选用50百分位的中等男性AHM假人模型,其身高1.76 m,坐立高度为0.92 m,体重75.3 kg。通过Madymo软件中的Joint Positioning功能对假人模型进行姿态调整和定位,利用Belt Fitting进行安全带的佩戴。最后定义各个部件的特性和接触定义。参照文献[4]的实车试验数据,作为仿真模型输入AEB制动时的加载条件,如图1所示。
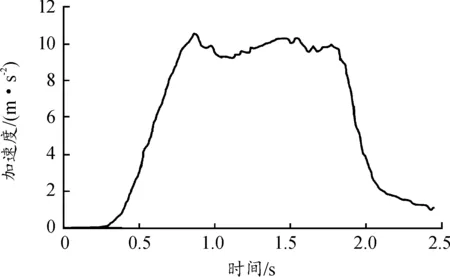
图1 制动加速度曲线
主动安全带模型的预紧器包括主动预紧器和爆炸预紧器2种。前者作用是在紧急制动系统启动时触发,通过施加预紧力来限制乘员的离位位移,使其保持正常坐姿;后者是在发生碰撞后瞬间触发,减小碰撞损伤。本文主要研究主动预紧器在AEB作用下对乘员的保护。
1.2 模型验证
建立好乘员约束系统模型后,需要验证车内的安全带模型部件和假人模型是否符合试验结果。Östh等[4]组织20名志愿者进行实车试验,在保持正常坐姿并佩戴主动预紧安全带的情况下,记录了志愿者在AEB制动加速度影响下身体躯干的运动响应波动范围。本文导入AEB制动加速度数据,对本文仿真模型中AHM在AEB与主动预紧安全带双重作用下的运动响应进行验证,如图2所示。试验结果符合要求,可进行后续仿真研究。
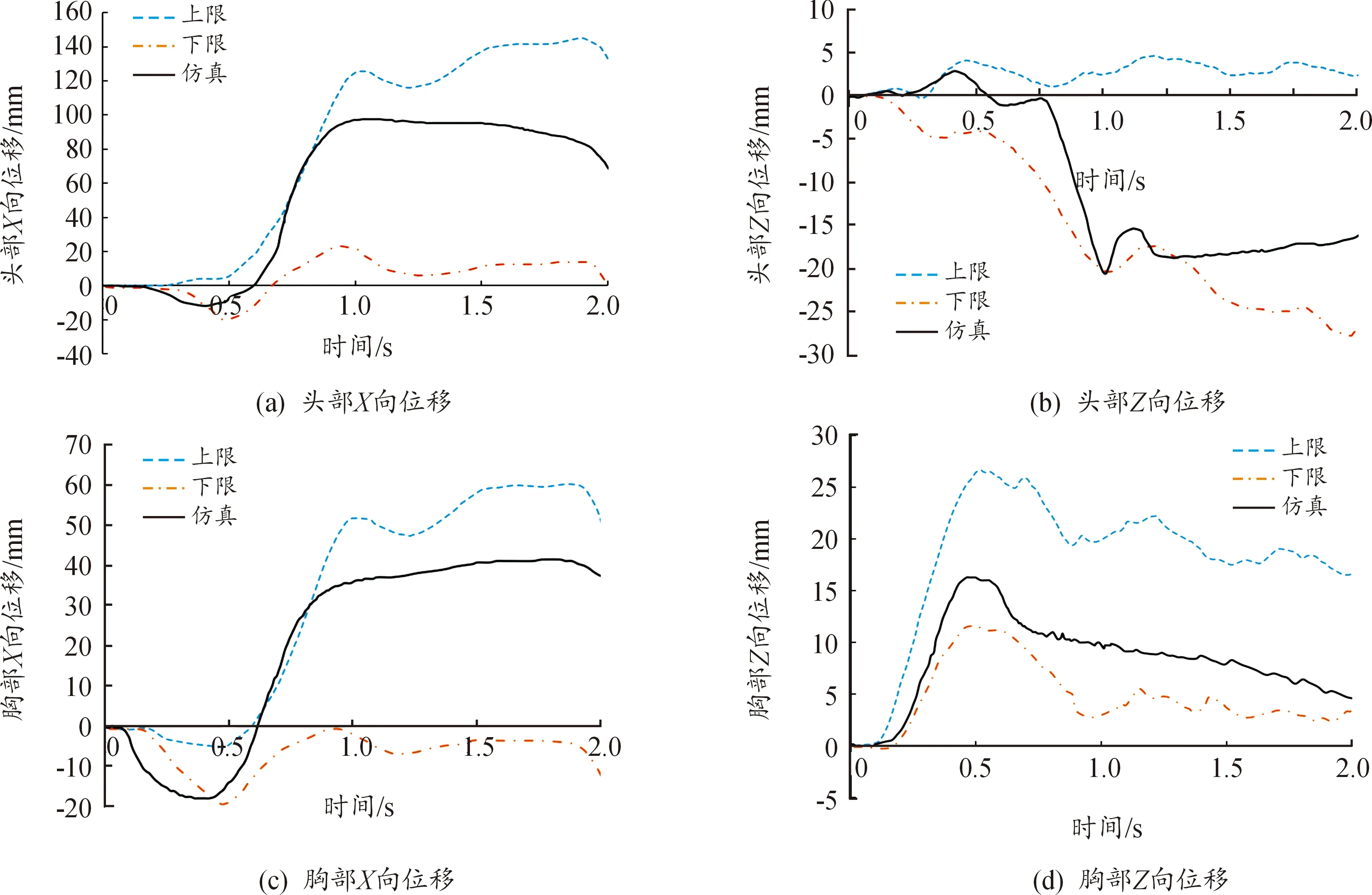
图2 模型验证
2 仿真模型的设置
未来的智能车辆中,高度倾斜的坐姿可能会成为无人驾驶的一种常态[14]。为了研究坐姿的不同对主动预紧安全带的影响,本文模拟4种乘员坐姿,前两者为前倾,后两者为后倾的躺姿(设为OOP1、OOP2、OOP3、OOP4),其中OOP1和OOP2以正常坐姿为基础头部前倾150、400 mm,OOP3和OOP4坐姿向后倾斜为117°、147°,分别建立仿真模型如图3所示,在4种坐姿下的乘员都配有主动安全带。

图3 乘员约束系统仿真模型
在AEB介入的工况下,4种坐姿的主动预紧装置都可以有效地限制乘员碰撞前的离位位移,通过在AEB制动信号来触发预紧器装置,以此施加预紧力来约束乘员坐姿。根据预紧时刻与预紧力大小的不同,主动安全带的保护效果也不同。然而,乘员坐姿的不同,影响乘员与方向盘的距离,在正常乘员坐姿下的预紧时刻和预紧力参数不能完全适用于其他类型的坐姿。本文根据已建立好的几种坐姿情况分别进行仿真试验,以得到每种坐姿下的主动预紧器的最佳预紧力和最佳预紧触发时刻。
3 仿真试验
3.1 试验设计
一般在构建代理模型之前,需要利用试验设计对不同的设计变量的目标响应值进行取样,选用科学的设计方式可以减少试验的次数,节省时间成本,即在不降低试验结果精度的前提下提高试验效率。拉丁超立方试验采样将多种设计变量划分为多种且不重复的区间,在每个区间抽到的概率相同,保证了每个因素下在各个区间可做到随机取样。所以,本文采用拉丁超立方试验设计方法。
为了得到最优的预紧安全带的性能参数,本文对4种坐姿进行仿真研究。仿真试验中选取主动预紧器中的预紧时刻、预紧力作为优化设计变量。而目标值的选取是为了说明安全带对乘员起到了最好的保护效果,由于坐姿的不同无法统一选择乘员的离位位移作为研究目标。故本文针对OOP1和OOP2前倾的坐姿,选择乘员的头部、背部与座椅的最大距离H、B作为研究目标,而坐姿OOP3和OOP4选择人体头部和胸部在制动过程中的位移Head_X、T1_X作为研究目标,从而分析不同坐姿下设计变量的最优解。OOP1和OOP2坐姿的距离示意图如图4所示。

图4 OOP1和OOP2坐姿的距离示意图
参考以往学者的实验研究[8],预紧力取值为50~500 N,为了充分考虑到主动预紧在制动前后时刻触发的影响,预紧时刻取0~400 ms。在确定设计变量的变化范围后,利用拉丁超立方试验设计对变量进行取样,共选取12组样本,之后对每种坐姿进行12组仿真试验得到优化目标的响应值,试验设计如图5所示。

图5 试验设计
3.2 代理模型构建
Kriging模型是一种估计方差最小的无偏估计模型,具有局部估计的特点,对于非线性的复杂变量拟合效果较好。由于汽车约束系统的仿真中属于高度非线性问题,故本文采用Kriging模型进行响应面模型的构建[15]。
利用Kriging模型对仿真得到的试验样本进行插值计算,以乘员的离位距离为设计目标构建响应面模型。由于实际情况中,紧急制动时的加速度曲线不是一直保持稳定的,本文在选取离位的数据时考虑乘员的安全情况,选择曲线中的峰值作为研究目标,得到的响应面模型如图6—9所示。
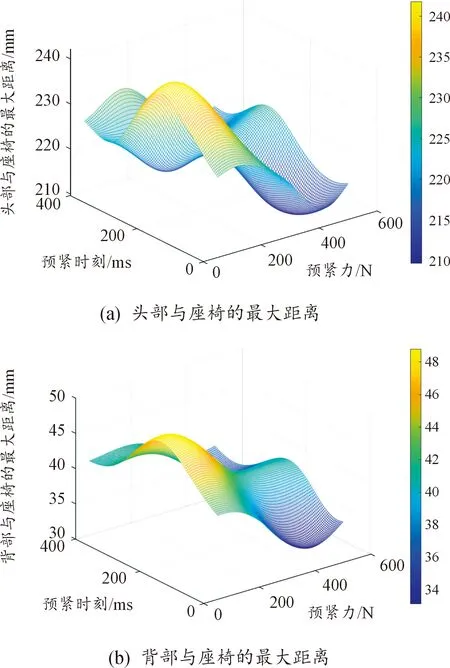
图6 坐姿OOP1响应模型
可以看出,曲线变化较为复杂,每种坐姿下的目标响应值在AEB介入下,受约束系统主动安全带参数的影响,前倾与后倾坐姿有所区别。OOP1和OOP2坐姿随着预紧力的增大,离位位移减小呈现负相关;OOP3和OOP4受预紧时刻影响较明显,与预紧时刻呈正相关。因此在后续会通过优化算法对不同的坐姿进行单独分析,以此找到最佳的预紧时刻和主动预紧力。

图7 坐姿OOP2响应模型
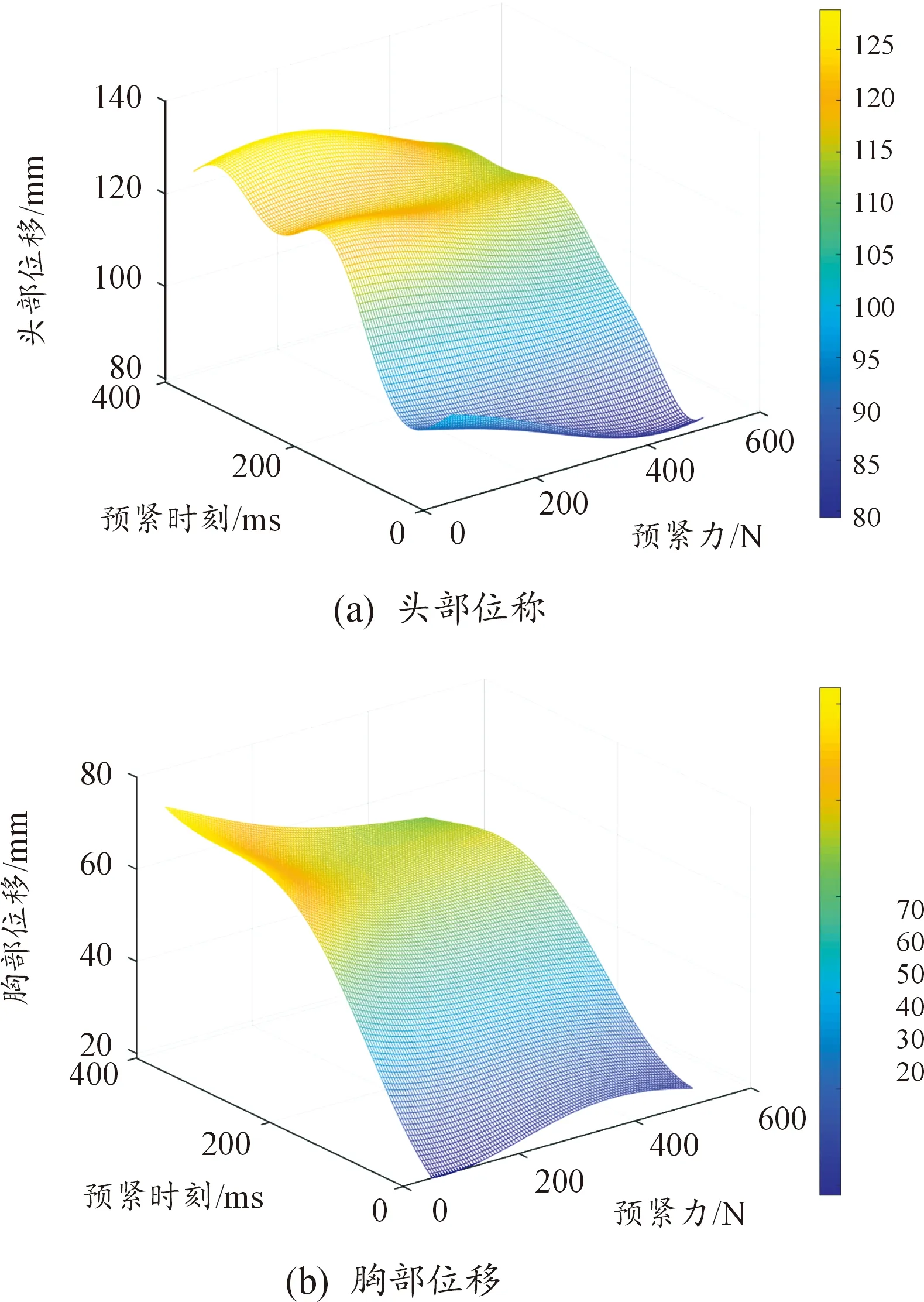
图8 坐姿OOP3响应模型

图9 坐姿OOP4响应模型
3.3 数据优化
针对这4种坐姿,采用第二代非劣排序遗传算法NSGA-Ⅱ进行优化。在该算法中,每个目标参数都被单独处理,对设计执行变异和交叉的标准遗传操作。选择过程基于“非支配排序”和“拥挤距离排序”2种主要机制。在优化运行结束时,构建了一个帕累托集,其中每个设计都具有目标值的“最佳”组合,并且在不牺牲一个或多个其他目标的情况下改进一个目标是不可能的[16]。通过该优化算法计算后得到安全带最优的预紧时刻和预紧力如表1所示。

表1 优化结果
对比4种坐姿的最优预紧力和预紧时刻,前倾角度大的坐姿OOP2比OOP1所需要的预紧力更大,同时,越早对乘员施加预紧力,对乘员消除离位的效果越好,受AEB影响的离位位移变小;对于后倾的坐姿中安全带施加的预紧力,后倾角度大使得人体重力因素影响效果加大,因此倾斜角度大的坐姿OOP4比倾斜角度小的坐姿OOP3要小,并且预紧时刻越提前,越易将乘员束缚在座椅上。
将优化后的预紧参数输入到软件中计算,得到的仿真结果与优化前的预测值进行对比,得到的误差如图10所示。

图10 预测值与仿真值的误差对比
可以看出两者之间的误差都在7%以内,这说明Kriging代理模型的精度有效。其中,第一类响应值为H、Head_X;第二类响应值为B、T1_X。
3.4 结果分析
将优化后的预紧参数代入到软件中重新计算,得到的结果与优化前的结果进行对比,可以看出:经过NSGA-Ⅱ算法优化之后,在AEB影响下OOP1和OOP2前倾坐姿的离位现象有所改善(图11),主动安全带对OOP3和OOP4后倾坐姿的束缚效果有所加强(图12)。

图11 OOP1、OOP2坐姿优化前后对比

图12 OOP3、OOP4坐姿优化前后对比
为分析优化后的预紧参数的影响效果,将优化前后的模型进行对比,如图13所示,优化后乘员的离位间隙有了明显减小。

图13 4种坐姿优化前后对比
对比4种坐姿的最优预紧力和预紧时刻,可以发现随着乘员坐姿的前倾程度越来越大,在紧急制动工况下需要的预紧力也越来越大。同时,越早对乘员施加预紧力,对乘员的离位消除效果越来越好。而对于后倾斜的坐姿中安全带施加的预紧力大小,倾斜角度大的坐姿比倾斜角度小的坐姿要小,并且预紧时刻越提前,越易将乘员束缚在座椅上。
4 结论
通过Madymo软件建立乘员约束系统模型,以未来智能车辆乘员坐姿为研究对象,构建4种坐姿,并选用AHM模型模拟乘员真实人体的肌肉张紧度,分析主动预紧器参数预紧力、预紧时刻对乘员在AEB影响下头、胸、背等部位离位位移的影响,采用Kriging构建响应面模型,代入到NSGA-Ⅱ算法进行优化。结果表明:OOP1和OOP2坐姿与预紧力呈现负相关,OOP3和OOP4与预紧时刻呈现正相关。前倾角度大的坐姿,主动预紧器的预紧力越大,消除离位位移效果越好;后倾角度较大的坐姿因其人体自身质量的影响,预紧力要小于后倾角度小的坐姿;前倾、后倾坐姿中,预紧时刻越早,对乘员离位位移消除越有利。本文虽然研究了前倾、后倾的坐姿,但是都局限于乘员面向行驶方向这一侧,以后的无人驾驶中乘员座位可能与行驶方向相反,故在以后的工作中会根据该情况进行探究。
猜你喜欢
康复(2022年25期)2022-10-05
汽车实用技术(2022年4期)2022-03-07
商用汽车(2021年4期)2021-10-13
北京汽车(2021年3期)2021-07-17
汽车工程(2021年12期)2021-03-08
小天使·一年级语数英综合(2020年9期)2020-12-16
发明与创新·小学生(2019年9期)2019-09-12
世界汽车(2019年6期)2019-06-20
语文周报·教研版(2018年14期)2018-05-03
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
