
一种民用飞机电作动舱门集中式控制方案研究
2022-08-11 03:49李亚伦齐蓉周素莹巩明超刘二豪
航空工程进展 2022年4期
李亚伦,齐蓉,周素莹,巩明超,刘二豪
(西北工业大学自动化学院,西安 710129)
0 引 言
近年来,多电飞机的发展一直受到各国研究者的关注,其特征是使用机电作动器(EMA)逐步取代液压、气压以及机械作动器。早在20世纪70年代初期,美国空军对机电作动取代液压作动进行研究,目前多电技术已在空客A380、波音B787和F-35等型号飞机上获得应用和验证。此外,在飞机的体系结构上,实施公共设备的机电综合管理,是飞机管理系统的发展方向。国外在20世纪80年代就开始了一系列机电综合研究计划,提出了公共设备管理系统(UMS)的概念,并成功应用到F-22、F-35战斗机和A380、B787民用客机上。目前,国内飞机电作动技术在舵面驱动上研究较多,但在舱门作动上的研究较少。国内飞机舱门作动系统还处于辅助动力作动阶段,例如新舟60、ARJ21舱门均为机械作动。国外飞机货舱门作动已经由纯手动、辅助动力及液压驱动向电作动发展,例如波音777货舱门已实现电作动。
在舱门系统的控制方面,中国商用飞机有限责任公司设计的舱门控制设备及控制方法提高了舱门操作的安全性,但对每个舱门仍采用单独控制器进行控制。这种分散式的控制方法使各舱门独立存在,与其他的公共设备系统之间没有信息交互,且大量的控制器、传感器、执行元件及线缆导致硬件利用率低,飞机体积、重量、功耗增大,可维护性差。整体上国内民用飞机关于电作动舱门系统的集中式控制研究成熟度较低,仅在舱门系统的信号交互方面有相关研究。国外提出的飞机管理系统架构通过高速总线互联,实现对飞机各系统的集中统一管理。这对舱门控制具有借鉴意义,可将舱门系统通过总线融入到机电设备综合管理系统,实现对舱门系统的集中式控制。
本文提出一种民用飞机电作动舱门集中式控制方案,对舱门集中控制系统的架构进行设计,简化舱门系统的复杂度;对集中式控制方案涉及的关键问题进行详细研究,包括总线参与的电机伺服控制设计,借鉴有限状态机的思想设计多舱门并行控制程序以及可修改感应距离的接近传感器设计;针对设计架构验证试验和电机伺服试验,对电作动舱门集中式控制方案的可行性进行验证。
1 舱门集中控制方案
1.1 架构设计
在充分考虑先进民用飞机机电综合管理的架构方式下,克服分散式舱门控制的弊端,设计的集中式控制方案架构如图1所示。在该架构下,舱门系统作为一个子系统融入到公共设备管理系统中,与刹车系统、起落架收放系统、环控系统等其他公共设备子系统共同接受机电设备的综合管理。

图1 舱门集中控制系统架构图Fig.1 Architecture diagram of the centralized control system of the cabin door
舱门集中式控制系统的组成包括:集中综合控制器、控制及显示装置、舱门电作动系统以及舱门系统总线。舱门电作动系统则由舱门控制器、预位电机、闩锁电机、开启电机等作动器以及指示到位的接近传感器组成。
1.2 集中式控制方案原理分析
基于上述集中式舱门控制方案的架构,舱门开启的流程如图2所示。控制和显示装置将操作人员开启舱门的控制指令编码,并发送到舱门系统总线上,集中控制器通过判断标识符ID接收指令,然后进行逻辑分析并产生有效控制指令,逻辑分析的目的是防止误操作。有效控制指令发送到舱门系统总线后,对应的舱门控制器判断标识符并接收信息,经控制律计算驱动闩锁电机运行,解闩锁到位后再驱动开启电机运行。电机运行到位信号由接近传感器产生,舱门控制器捕获到位信号后停止驱动电机。电机运行过程中的速度位置等信息经过舱门控制器处理后,经总线反馈回集中控制器,完成对电机的闭环控制。另外,舱门的状态信息也可以经过总线发送至控制和显示装置,指示当前的舱门状态。电机运行到位后,舱门开启过程完成。
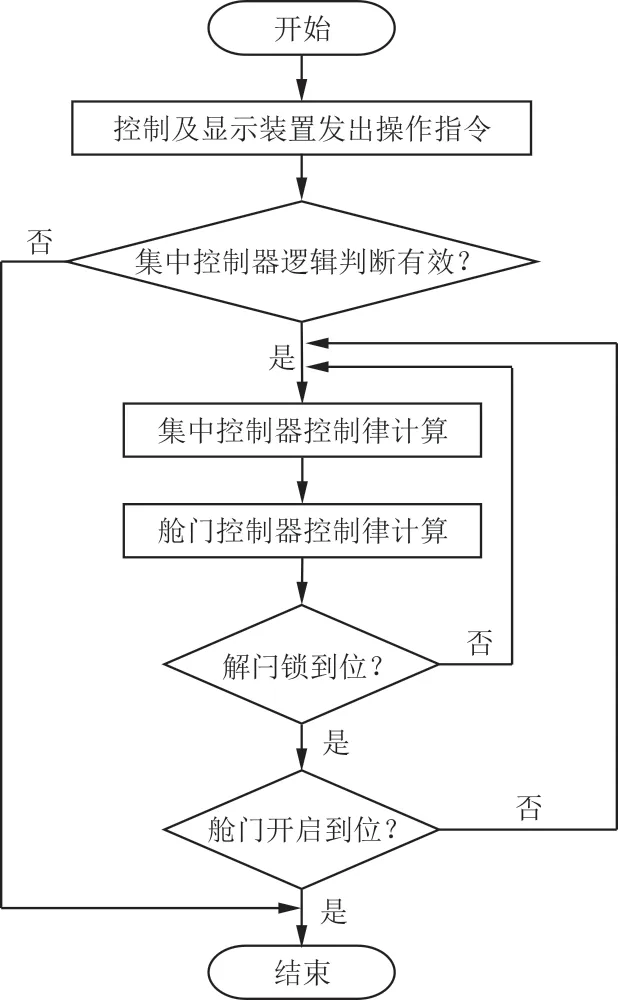
图2 舱门开启流程图Fig.2 Door opening flow chart
经过上述分析,舱门控制的实质是对电机的控制,由于集中式舱门控制方案增加了集中控制器对整机舱门进行统一调度的过程,因此电机的伺服控制过程有总线参与其中,如何解决这一问题是关键。整机多个舱门同时控制,并行运行互不影响的问题也需要解决。另外,针对目前民用飞机舱门传感器选型混乱多样的局面,设计感应距离可修改的接近传感器,有利于统一舱门系统传感器选型。
综上,对比传统分散式舱门控制方案,集中式舱门控制方案具有以下优势。
(1)采用集中控制器对各舱门作动系统进行统一调度,对舱门的控制管理高度集中化。集中控制器可选择环境较好的安装位置,降低电磁干扰影响。
(2)舱门控制器承担的计算量减少,降低对控制器的性能要求。
(3)采用总线取代点对点通信,大量减少线缆数量,降低系统复杂度,降低经济成本,提高舱门系统可靠性。
(4)采用感应距离可修改的接近传感器,选型统一,提高应用灵活性。
2 关键问题解决措施
2.1 总线参与的电机伺服控制设计
通常电机的控制过程只由一个控制器完成,但是在集中式舱门控制方案下,由集中控制器综合管理各舱门控制器,同时考虑到降低舱门控制器的性能要求,集中控制器也承担了部分控制律的计算。集中控制器计算结果的发送及电机转速、位置信息的反馈均需要通过总线传送,针对这一问题本文设计有总线参与的电机伺服控制方案,该控制方案的结构如图3所示。
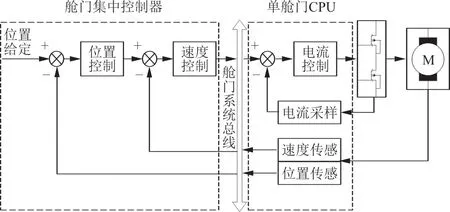
图3 电机伺服控制方案Fig.3 Motor servo control scheme
由于舱门各电机动作行程为固定角度,同时为保证舱门运行的平稳性,采用电流、转速、位置三闭环电机伺服控制方案,控制律采用经典PID控制。位置环和速度环的控制由集中控制器完成,由于电流环控制对实时性要求较高,因此电流环控制仍由舱门控制器完成。集中控制器控制律计算的转速环输出通过总线发送到舱门CPU作为电流环给定,参与电流环控制律的计算,舱门CPU捕获的速度和位置信号也通过总线发送给集中控制器,参与速度环和位置环控制律的计算。设置外环控制周期为内环的5~8倍,提高总线利用率。
常用的航电总线类型及特点如表1所示。
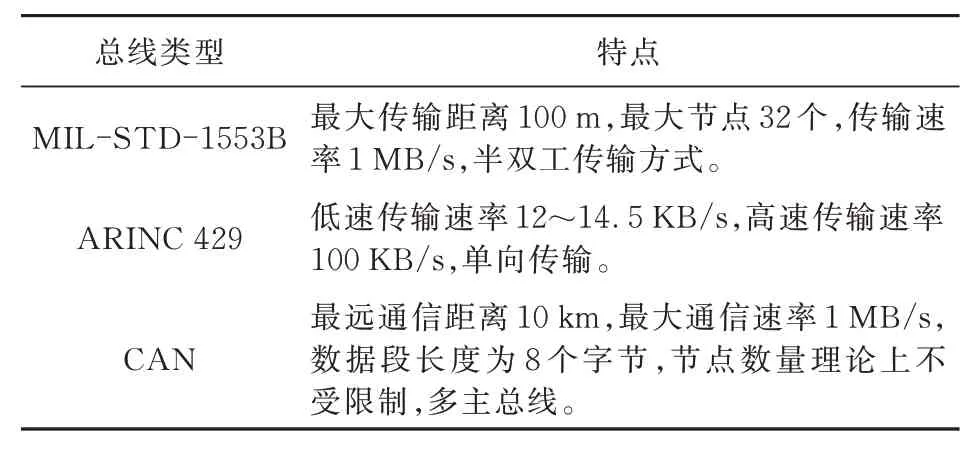
表1 常用航电总线对比Table 1 Comparison of commonly used avionics buses
考虑到可靠性、实时性、抗干扰能力及传输距离等因素,选用CAN总线作为集中式舱门控制系统的总线。随着总线技术的发展,总线通讯速率将进一步提高,电流环控制律计算也可以交由集中控制器完成,舱门控制器只需要完成简单的通讯功能、电机驱动功能以及传感器信号采集功能,整个舱门系统的功能更加集中化。
2.2 实现多舱门并行控制的软件设计
在分散式舱门控制系统下,每个舱门控制器都通过各自的通信线缆单独控制,舱门之间不存在信息交互,因此各舱门的控制与运行过程是相互独立的。但是在集中式控制系统中总线取代了点对点通信,整机舱门的控制信号及运行过程中的反馈信号均通过总线传输,如何在一个舱门运行占用总线时还能够同时控制其他舱门,即实现多舱门并行控制的问题需要解决。针对这一问题,本文提出通过软件设计来解决的方案。
借鉴有限状态机(FSM)的思想设计的软件方案如图4所示,能够解决集中式舱门控制系统下多舱门的并行控制问题。
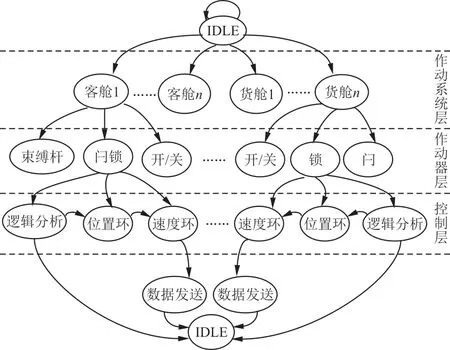
图4 基于有限状态机的软件方案Fig.4 Software scheme based on finite state machine
该软件设计方案是三层状态机的嵌套,第一层为舱门作动系统层,第二层为舱门作动器层,第三层为控制层。整个状态机呈现出从待机状态(IDLE)不断向下层发散的树状结构。该状态机的特点是,当第一层状态机的状态转移变量从一个舱门转换到另外一个舱门后,只要该舱门分支下层的状态转移变量不变,如果第一层状态转移变量再次转换回该舱门,则状态机可以承接上一次的运行过程,继续执行对应电机的控制。通过对该特点的运用,可以解决多舱门的并行控制问题,然而该方法并不是严格意义上的同时控制,而是通过状态机的方式对程序执行过程进行调度,呈现出并行控制的特点。
利用该方法控制舱门作动电机对系统提出时序上的要求:

式中:为电机控制程序的执行时间;为总线数据的收发时间;为电机速度环控制周期。
2.3 感应距离可修改的接近传感器设计
接近传感器为舱门作动器的运动提供到位信号,参与舱门作动系统的控制过程。目前应用的接近传感器大多与接口模块集成为接近开关,只能检测靶标距离固定值,因此在舱门控制中针对不同功能需要选择不同型号的接近开关。为了统一选型并且提高应用的灵活性,设计感应距离值可修改的接近传感器,其工作原理如图5所示。
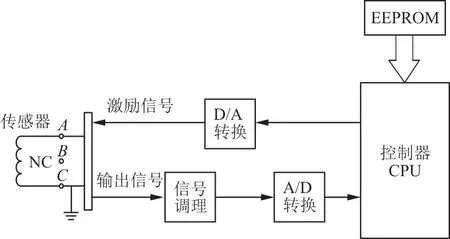
图5 可修改感应距离的接近传感器原理图Fig.5 Schematic diagram of proximity sensor that can modify the sensing distance
在控制器外部扩展一块电可擦除可编程只读存储器(EEPROM)来存储舱门各作动器到位值。随着靶标的移动,接近传感器输出与靶标距离呈现一定函数关系的模拟信号,在经过信号调理和A/D转换后与存储的预设值进行比较,产生“接近”或“远离”信号。根据以上分析,只需要在软件中修改感应距离的预设值,就可以实现同一型号的接近传感器感应不同距离靶标。
3 试验验证
3.1 集中式控制方案的架构验证试验
集中式控制架构的验证试验由上位机、控制器及舱门作动系统模拟装置组成。上位机基于Lab Windows/CVI设计,负责各控制指令下发及舱门状态监视;控制器采用TMS320F28335;作动系统模拟装置由电机带动金属挡板运动模拟舱门作动器的运动,由某型号接近传感器产生到位信号。
模拟控制显示装置的上位机界面如图6所示,舱门作动系统由6个舱门模拟装置组成,具体如图7所示。

图6 上位机界面Fig.6 PC interface

图7 舱门作动系统模拟装置Fig.7 Simulating device for cabin door actuation system
试验时由上位机下发舱门具体作动器的控制指令,指令经过CAN总线被控制器接收后进行逻辑判断。逻辑判断的目的是保证正确的操作顺序,例如舱门在未解锁状态时下发开启舱门指令,则指令不能被执行。经逻辑判断为有效的控制指令,能够发送至舱门作动系统,执行相应动作。电机运行到位后,舱门状态信息上传至上位机进行显示。
试验中上位机对客舱门4依次发出解锁、开启指令,由于当前舱门处于完全关闭状态,因此指令均被逻辑判断为有效。锁电机、开启电机依次动作,对应的接近传感器产生到位信号后电机停止运行,模拟装置开启到位指示灯亮起显示该舱门当前状态,并通过总线将状态信息上传到上位机显示。上位机母面板指示当前4个舱门处于可靠关闭状态,而客舱门4处于禁止起飞状态。观察客舱门4的子面板,指示当前舱门解闩、开启到位。该舱门作动器模拟装置的试验结果如图8所示,上位机界面的试验结果如图9~10所示。

图8 模拟装置试验结果Fig.8 Experimental results of the simulation device

图9 上位机试验结果Fig.9 Experimental results of the PC

图10 上位机试验结果Fig.10 Experimental results of the PC
综上所述,在集中式舱门控制方案的架构下,舱门控制装置的指令能通过总线正确发送到舱门控制器,舱门控制器能解码并执行动作,且显示装置能正确指示当前的舱门状态信息。
另外,上位机同时发送多个舱门控制指令,各舱门作动模拟装置均能正确动作,验证实现多舱门并行控制的软件设计的正确性。通过上位机修改接近传感器感应距离预设值,能够实现电机带动挡板停止在不同位置,说明所设计的感应距离可修改的接近传感器的可行性。
3.2 集中式控制下电机伺服试验验证
集中式舱门控制方案下的电机伺服试验装置平台,采用TMS320F28335为集中控制器,舱门控制器采用DSP28035,控制和显示面板的模拟用上位机设计,系统总线采用CAN总线,舱门作动电机选用无刷直流电机,电机的运行过程则通过磁粉制动器加载模拟。试验装置如图11所示。
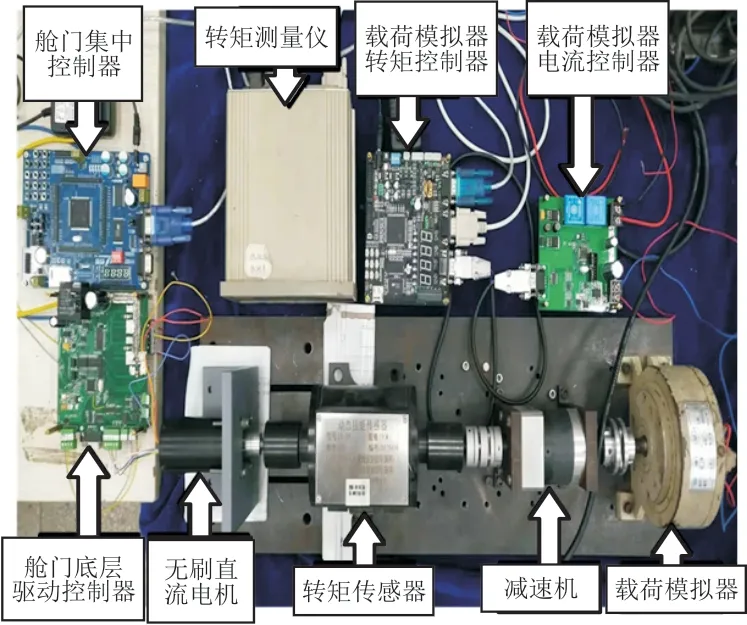
图11 验证试验平台Fig.11 Simulation experiment platform
试验过程如下:上位机发出舱门开启或关闭指令,集中控制器接收到动作指令后按照位置给定曲线开始执行位置环和转速环控制律的计算,并将计算结果发送至CAN总线,舱门控制器接收计算结果后作为电流环给定,进行电流环控制律计算,驱动并控制电机开始带载运行;载荷模拟器通过转矩控制器和电流控制器加载,模拟舱门运行过程中作动电机的带载情况;电机位置和转速信息则通过无刷直流电机的霍尔传感器反馈,反馈值通过CAN总线按照设定的频率发送回集中控制器,构成闭环完成对电机的伺服控制。
试验以舱门某作动电机要求30 s内转动(100±2)°,行程范围为20°起始至120°到位为例。考虑到作动机构不同角度位置及风载,电机运行过程中的负载时刻变化,电机行程范围内各位置对应的负载大小已给定,如图12所示。
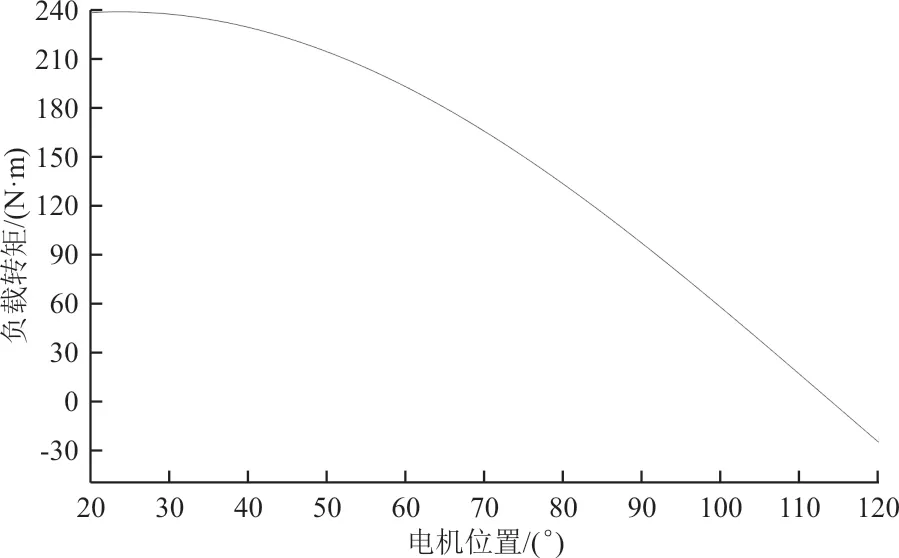
图12 电机负载曲线Fig.12 Motor load curve
将满足上述要求的曲线作为位置给定,通过在集中控制器中设置数组表示该曲线。电机运行过程中控制器将电机位置、转速信息实时上传至上位机显示。试验结果的电机位置跟踪如图13所示,转速跟踪如图14所示。
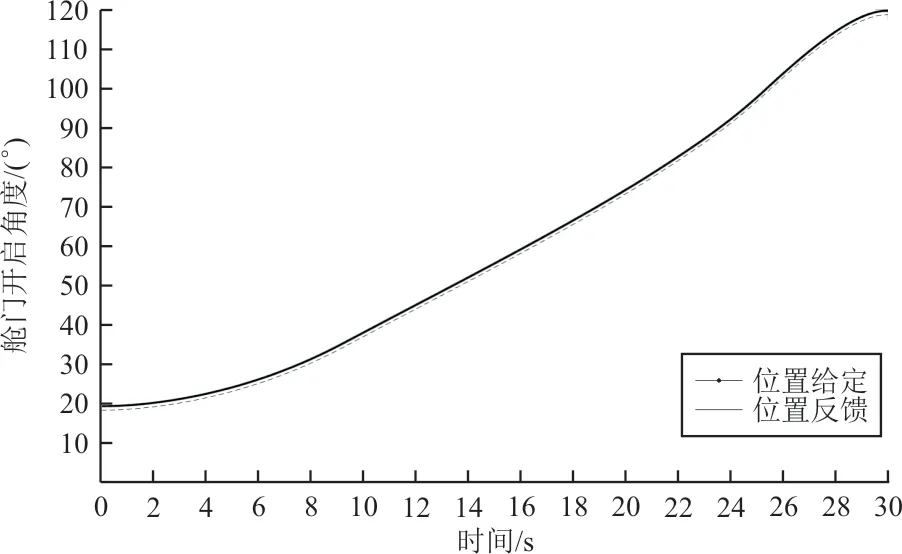
图13 位置给定与反馈曲线图Fig.13 Position setting and feedback curve diagram

图14 转速给定与反馈曲线图Fig.14 Speed setting and feedback curve diagram
从图13~图14可以看出:电机在30 s时由20°运行至119.3°,满足30 s内运行(100±2)°的指标要求,且反馈曲线显示电机位置及转速跟踪效果良好。该试验结果表明本文设计的集中式舱门控制方案,能够实现对舱门作动电机的伺服控制,且控制效果良好,初步证明了集中式舱门控制取代分散式舱门控制的可行性。
4 结 论
(1)综合未来民用飞机的发展趋势,本文提出的电作动舱门集中式控制方案使得舱门系统的控制更加集中化,并且可以将舱门系统融入到机电设备综合管理系统中。
(2)该方案采用总线取代传统点对点通信,极大地减少了线缆数量,降低了舱门系统复杂度,提高了系统经济型、可靠性和可维护性。
猜你喜欢
航空工程进展(2022年5期)2022-10-25
智族GQ(2019年9期)2019-10-28
科技信息·下旬刊(2018年4期)2018-10-21
山东工业技术(2017年15期)2017-09-05
中国医药科学(2016年9期)2016-07-25
现代经济信息(2016年4期)2016-06-20
汽车观察(2015年10期)2016-04-06
中国当代医药(2015年25期)2015-10-21
现代电子技术(2009年6期)2009-05-31
