一种小型光电稳定平台结构设计与分析
2022-08-08 00:52:26李凌杰于昊钲温庆荣
激光与红外 2022年7期
李凌杰,于昊钲,温庆荣
(华北光电技术研究所,北京 100015)
1 引 言
稳定平台[1]通过搭载不同的光电载荷应用到各种环境中:医疗搜救、电力检修、消防灭火等。稳定平台在受到的冲击、振动时,可以有效地降低外界扰动带来影响。而对于小型无人机的带载能力,就需要对稳定平台的质量、体积、刚度进行着重考虑,针对上述问题,本文采用模块化、轻量化设计,通过结构设计与仿真分析相结合的方式,设计一种稳定平台。
2 稳定平台总体结构设计
2.1 稳台框架结构
根据某型无人机的运载能力及对稳定精度的要求:稳定平台的俯仰运动范围为+30° ~-90°,方位为360°连续旋转;俯仰最大角加速度60°/s2,方位的最大角加速度90°/s2;整个稳定平台直径≤140 mm,质量≤5 kg;稳台的稳定精度0.1 mrad。选择了两轴两框架的结构形式[2],外观采用球形设计降低风阻。两轴即方位轴和俯仰轴,稳定平台的稳定精度与轴系的回转精度有很大影响,是机械结构设计时关键的因素之一。两框架指的是外框架和内框架(负载框架),外框架构成了稳定平台的骨架,并实现方位旋转运动;内框架主要用于承接负载安装,并通过俯仰驱动使得内框架在一定角度内可以旋转。三轴陀螺通过测量角速度来判断自身的姿态,这可用于稳定平台的稳像功能,以上为两轴稳定平台的整体架构,如图1所示。
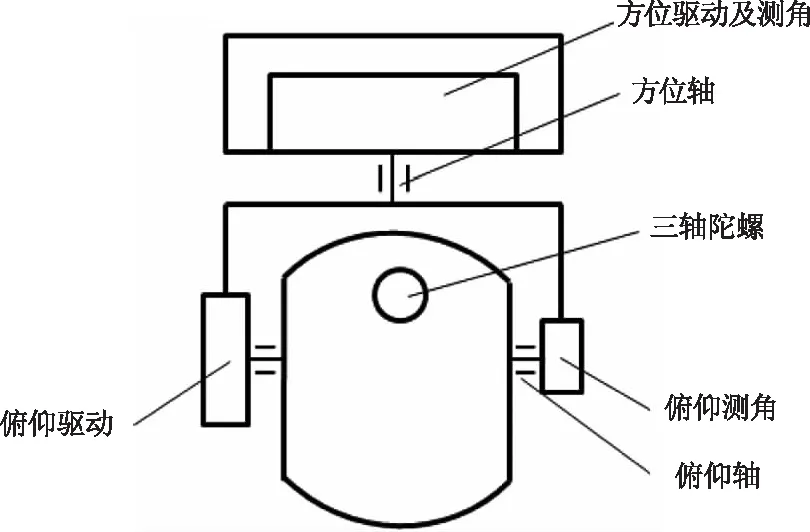
图1 两轴稳台架构Fig.1 Two-axis platform stabilizing structure
2.2 轴系设计
稳定平台的轴系精度直接影响到最终产品的性能,在满足尺寸要求的状态下,方位轴系和俯仰轴系布置应紧凑。方位轴系通过一对轴承与方位座连接,上轴承压盖一端压紧轴承内圈,另一端与U型架相连,从而使得U型架可以旋转。方位轴系主要承担轴向载荷,同时又要保证旋转的精度,因此,此处选择一对角接触球轴承采用背对背安装[3],通过内圈外圈压紧的方式,消除轴系窜动。
由于无人机安装尺寸要求,稳定平台的高度要尽可能降低,在方位轴系设计时,采用了直流力矩电机与轴承的嵌套连接,力矩电机通过结构安装在轴承的内圈中,进一步降低方位轴系的高度。为了实现方位轴系的360°连续旋转,在电机中心处安装电器滑环,方位测角采用了光电式编码器[4],可以实现无接触测角。方位组件的详细结构设计如图2所示。
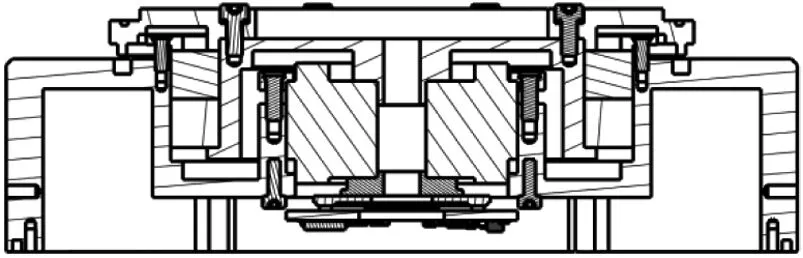
图2 方位组件结构图Fig.2 Azimuth component structure diagram
俯仰轴系分为两个组件分别是俯仰左轴系和俯仰右轴系,其中左轴系作为负载俯仰运动的动力输入端,采用直流力矩电机直接套轴的方式来减少由于多级传动带来的精度误差;左轴系的轴承采用四点压紧方式,保证轴向和径向的窜动,俯仰轴中间为空心轴,利于内部负载的走线与编码器选型,俯仰左轴系的详细结构如图3所示。
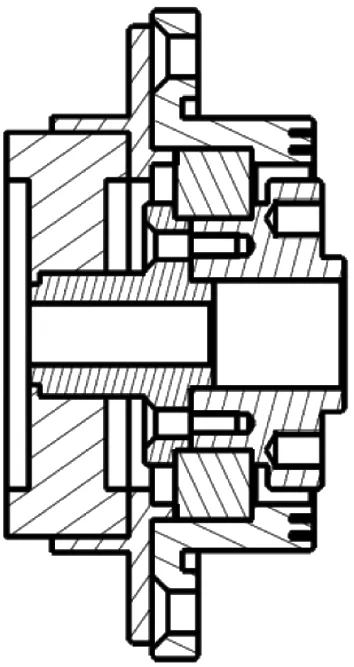
图3 俯仰左轴系结构Fig.3 Pitching left shafting structure
俯仰右轴系由轴承座、轴承、旋转轴、轴承端盖和编码器组成,如图4所示。轴承单端固定,另一端游动,轴承座与U型架相连,空心轴与负载框架相连接,实现俯仰旋转。
图4 俯仰右轴系Fig.4 Pitching right shafting structure
根据系统指标计算力矩电机所需的最小力矩(方位角加速度90°/s2,俯仰角加速度60°/s2),需要计算旋转的惯性力矩和方位、俯仰的摩擦力矩,对于俯仰电机还应计算风阻力矩。方位电机计算如表1所示,俯仰电机计算如表2所示。
表1 方位电机所需力矩计算Tab.1 Torque calculation of azimuth motor
表2 俯仰电机所需力矩计算Tab.2 Calculation of required torque of pitch motor
2.3 稳台外形设计
整个稳台采用柱形设计如图5所示。U型架是连接方位组件与俯仰组件的纽带,U型架的结构刚度直接影响了整个稳定平台的刚度,U型架采用一体式加工,这样既可以保证稳台的刚度又可以保证左右轴系的同轴度与方位的垂直度,即两个正交轴的垂直度。另一方面此柱形稳定平台的气动性能好,相比于叉型稳台可以降低更多的风阻,提升系统的稳定性。
图5 稳台支撑结构Fig.5 Support structure of platform stabilization
3 关重件的仿真分析
稳定平台的负载主要由U型架的左右轴系支撑,因此需要轴系及U型架进行仿真分析,根据总体指标U型架最大变形不超过0.005 mm,左右俯仰轴系组件变形不超过0.003 mm,首先对俯仰轴系及U型架进行简化处理,将材料添加到模型中,俯仰左、右轴采用材料为钢,其余采用铝合金,将负载框架及最大可更换的负载重量用质量点代替,便于分析计算,接着划分网格,采用多级网格划分得到质量优秀的网格[5],将U型架底端固定,设定重力方向进行仿真分析。
如图6所示,整个U型架的最大变形为0.0028 mm,位置在U型架下端,安装轴系组件位置的变形为0.0019 mm,小于总体指标要求,满足使用性能。
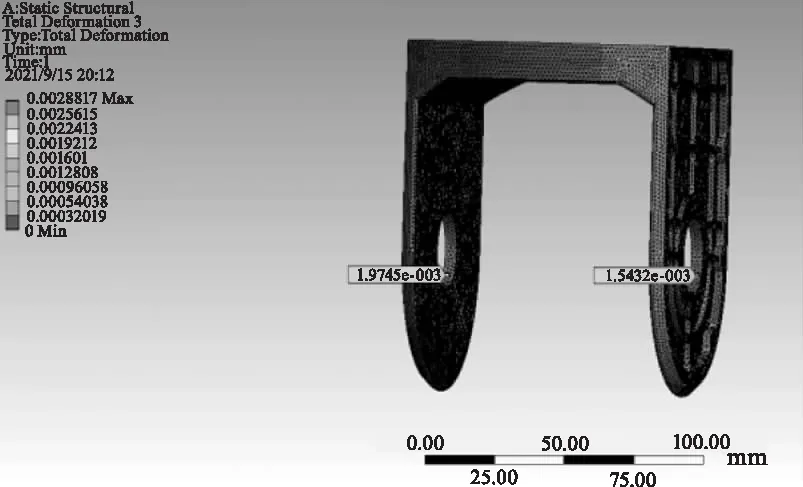
图6 U型架变形分析Fig.6 Analysis of U-frame degeneration
如图7所示,左右两个俯仰轴系组件的最大位移为0.0023 mm,同样小于总体要求指标,满足系统刚度。
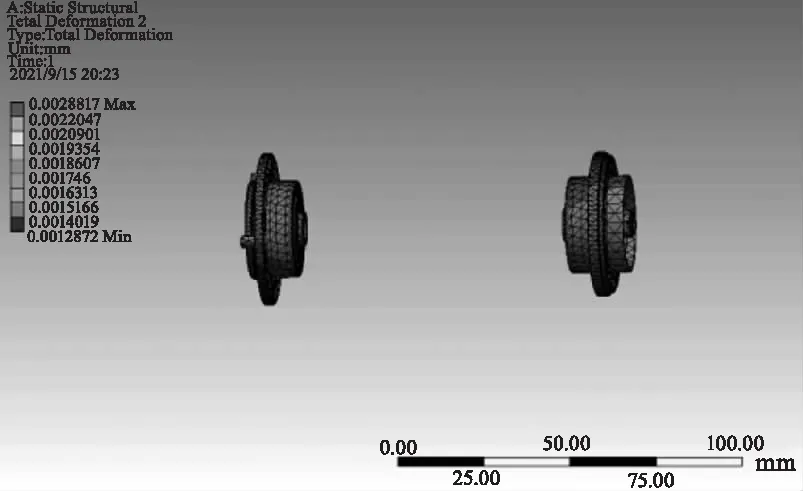
图7 俯仰轴系变形分析Fig.7 Analysis of shafting deformation
4 结 论
根据某型无人机提出的指标,设计了一种小型的稳定平台,整体采用两轴两框架结构。采用了模块化设计,方便后期装调与维护,并且采用结构设计与仿真相结合的方式进行结构设计,通过仿真验证关重件的力学性能,确保设计合理符合要求,希望通过本文的设计与分析可以为以后的机载稳定平台提供设计思路与帮助。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
幼儿园(2021年12期)2021-11-06 05:10:20
经济技术协作信息(2020年27期)2020-02-28 21:03:27
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
科学与财富(2019年18期)2019-07-10 04:15:51
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
舰船科学技术(2016年1期)2016-02-27 15:39:19
火控雷达技术(2016年2期)2016-02-06 02:29:00
船海工程(2015年4期)2016-01-05 15:53:26