
基于热红外的煤层跟踪长壁采煤机选采能力研究
2022-08-08 02:36岳勃
机械管理开发 2022年7期
岳 勃
(晋能控股煤业集团同忻煤矿山西有限公司, 山西 大同 037001)
引言
长壁煤层开采[1]是一种全面开采地下煤层的方法,包括使用机械化采煤机将大块或大板的煤炭移走。煤板宽一般为200~350 m,长度可达5 km。机械采煤机安装在采煤盘和导轨上,导轨引导采煤机在工作面上来回移动。采用这种开采方法,顶板由液压盾构支撑,液压盾构随着开采的进行而单独推进。要实现高产量的长壁作业,不仅需要准确知道设备位置,还需要关于煤炭资源空间位置的精确信息,为了最大限度地减少对设备的损害,减少粉尘产生,使人员免受潜在危险的影响,开发一种安装在机器上的热红外摄像机和信号处理算法,实时为采煤机水平控制提供地质智能信息。
1 基于视觉传感的标记波段跟踪
最初的研究集中在利用可见光摄像机复制人类的视觉能力。可见光相机方法代表了一种直观的标记带跟踪方法,这种特殊的实施方法在实践中也产生了一些局限性,特别是在采煤机水平控制问题上。这些具体的限制[2]是:为使成像清晰,需要使用恒定光源;水和灰尘经常完全遮挡任何可见光成像;对单一的、固定的位置产生受限制的可观察性;有些矿床的地质情况根本没有产生容易观察到的可见标记带。
为了克服可视摄像机系统的局限性,考虑采用热红外传感器的替代方法。使用热红外成像的想法是基于所有物体根据其温度发射热红外能量的概念[3]。在电磁波谱的不同区域工作,如图1 所示与热红外能量相关的波长范围。由于旋转的采煤机滚筒与工作面接触,摩擦作用产生了热对比区域,热红外传感与长壁作业之间的具体联系变得明显。这些温差在电磁波谱的热红外区可以观测到。

图1 红外波长范围
辐射强度可以由红外摄像机检测,并以数字图像显示,其中像素值代表测量的热红外强度。热红外相机的典型输出是用不同像素强度值的灰度图像表示的,其中较暗和较亮分别对应较冷和较热的物体。图2 显示的是紧凑型防爆外壳与热红外辐射传感器相结合的一个摄像机。

图2 带有防爆壳体的热红外摄像机
2 图像处理和缝隙跟踪
2.1 热图像采集
下页图3 为长壁煤矿采煤机牵引臂垂直于工作面安装的摄像机采集到的典型热成像摄像机视频流快照。这张图片显示了一个特征,对应于一个“热标记带”[4],产生于硬质机械材料上的摩擦力。应该注意的是,这种热特征是肉眼看不见的。图像底部1/3 较暗的部分是采煤机上堆积的煤。这幅图像是在采煤机产生大量空气中的颗粒和碎片的地质条件下获得的,几乎无法被可见光系统观测到。然而,使用红外成像的波段特征仍然很明显,这表明了热红外成像技术的一个关键特性[5],其成像质量不像普通摄像机那样受到颗粒物的严重影响。
2.2 数据处理
跟踪标记波段高度所采用的数据处理程序如图4 所示。该算法首先获取一幅新图像,该图像由安装在长壁采煤机上的热成像系统的单帧图像组成。使用经典的地平线特征提取图像处理算法,检测标记波段并确定其在图像中最有可能的位置。将该方法检测到的标记波段应用于图3 的样本热红外图像,如图5 所示跟踪的热标记带。然后定义感兴趣的区域,沿检测标记带确定中心点。标记带的高度是在这个感兴趣的区域内估计的,并与当前采煤机横过长壁工作面的位置进行标记。

图3 采煤机牵引臂垂直于采煤工作面的摄像机上获取的热红外图像
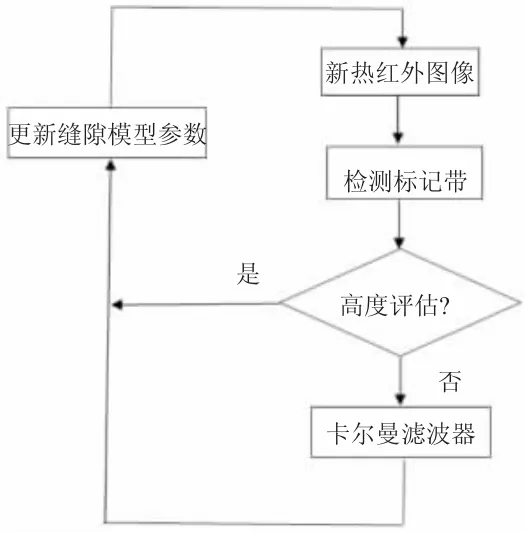
图4 跟踪焊缝趋势的信号处理方法流程图

图5 对采集到的图像进行标记
2.3 卡尔曼滤波的标记带跟踪
如图4 流程图所示,在每个时刻估计标记带高度的任务相当于跟踪在一维平面上匀速运动的质点在轨迹上受到随机扰动的运动。在这种情况下,卡尔曼滤波器是一个具有鲁棒性的估计框架,一个简单的位置—速度卡尔曼滤波器随后应用于跟踪场景。
从图像/摄像机坐标到机器垂直位置的估计热标记带高度的映射可以通过校准实现。图6 比较了原始滤波和卡尔曼滤波标记带高度估计,在坐标下的长壁工作面。这个滤波过程在热标记特征与背景强度没有很好区分的情况下是有用的。在低信噪比下代表了一种稳健和确定性的方法来处理噪声和测量不确定度。

图6 未滤波(细线)和卡尔曼滤波(粗线)标记带的煤层地平跟踪
3 结果与讨论
使用热红外摄像机已证明是一个有用的应用。不同的地质条件导致了处理热特征的新技术的产生。从后期试验的结果可以看出,热成像相机的位置和安装角度对波段特征检测的性能起着重要的作用。结果表明,相机应该垂直于面部安装,以便为自动标记波段检测提供最强大的热特征。
3.1 感知可生存性和安装位置
需要进一步的研究,以确定一种方法,以允许基于采煤机摄像机部署地长期实施。考虑到长壁开采过程中遇到极端恶劣的操作条件,确定一个合适的位置安装传感器,使其具有最大的使用寿命是一个设计挑战。应该指出,已经对几个地点进行了调查,取得了有益的结果。也有可能在固定位置使用多个摄像头,例如安装在屋顶支架上,而不是在移动采煤机上使用单个摄像头。利用热红外成像系统提供额外的监测能力可以取得一些有用的进展。特别是,与面部空洞相关的热差异可以形成自动化面部完整性监测系统。
3.2 综合采矿解决方案
热红外传感器产生的信息可以与现有的长壁切割模型数据库集成,提供水平控制系统。这包括通信、智能处理、系统验证和集成。井下长壁人员将通过更新的图形用户界面控制和管理该系统,该界面集成到标准操作控制器中显示[6]。这允许操作人员设置所需的视界外,根据预先确定的策略,它还将提供所需提取概要文件的图形显示,以及选择或忽略该输入的选项。如第317 页图7 所示将基于热红外的传感集成到现有配置中的总体系统拓扑。
4 结论
本文论述了一种采矿解决方案,以帮助开发长壁作业的自动化地平控制策略。研制了一种由热红外摄像机、智能处理算法和开放通信接口组成的系统。该方法用于识别和跟踪地质标志带特征,为自动采煤机地平控制系统提供输入。详细介绍了软件、硬件和通信系统。传感器和系统技术继续发展,以进一步提高智能地下采矿自动化能力,提高生产率、可持续性和安全性。
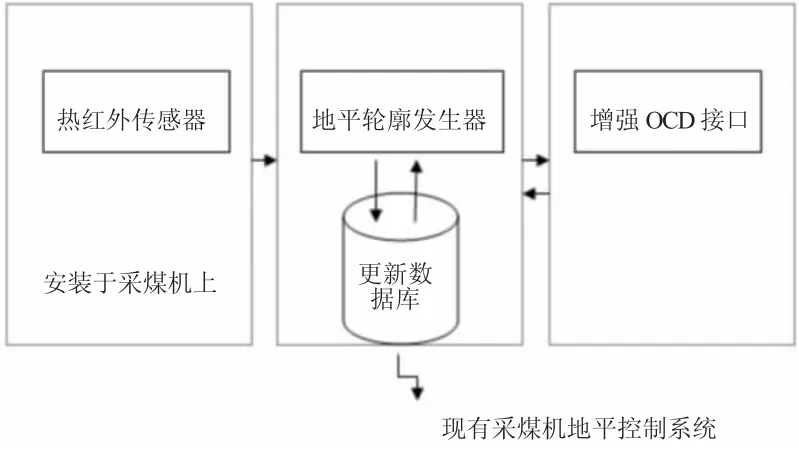
图7 基于热红外缝隙传感器的地平控制系统
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
防爆电机(2022年1期)2022-02-16
北京航空航天大学学报(2021年7期)2021-08-13
河北画报(2021年2期)2021-05-25
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
