
主从结构下储能变流器并联运行建模与附加控制
2022-08-01 07:16朱利锋吴彬锋宋恩亮刘子卓杨成钢
电力系统及其自动化学报 2022年7期
朱利锋,吴彬锋,宋恩亮,刘子卓,杨成钢,刘 睿
(1.国网浙江省电力有限公司丽水供电公司,丽水 323000;2.智能电网教育部重点实验室(天津大学),天津 300072)
在独立交流微电网中,储能系统能够为负荷和其他分布式电源提供稳定的电压和频率,增强微电网的稳定性和可靠性,提高风、光等可再生能源的消纳水平。在多种形式的储能系统中,以锂离子电池为代表的电化学储能在国内储能项目中的占比逐渐升高。电化学储能系统主要由电池本体、电池管理系统BMS(battery management system)和功率变换系统PCS(power conversion system)构成。其中,功率变换系统(本文亦称储能变流器)作为连接电池本体与交流电网的重要接口,其控制策略对于系统运行稳定性具有重要影响。多个储能变流器的并联运行能够有效提升系统可靠性,并实现系统容量的灵活配置和电池单元的精细化管理。独立交流微电网中,所采用的变流器并联运行协调控制方法应实现以下目标:①系统电压和频率稳定控制;②系统功率快速均衡,保证变流器输出功率按额定容量分配。现有方法主要包括主从控制[1-6]、平均电流均分控制[7-9]和下垂控制[10-14]等。其中,主从控制下变流器间稳态功率分配受线路阻抗影响较小,能够为负载提供恒定幅值和频率的电压。采用主从控制的交流微电网结构如图1所示。
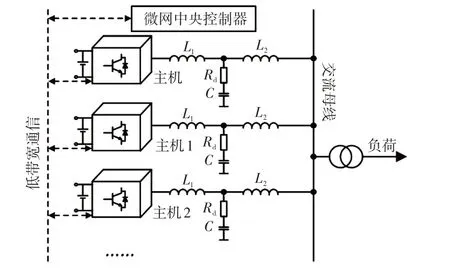
图1 主从结构下交流微电网结构Fig.1 Structure of AC microgrid under master-slave scheme
各储能变流器直流侧独立连接至电池单元,交流侧经过LCL滤波器(L1、L2和C(Rd))连接至公共耦合点PCC(point of common coupling),经隔离变压器共同为负荷供电。通常将一台变流器选为主机,采用恒压恒频控制以建立和维持系统的电压和频率;其余变流器作为从机,通过锁相环PLL(phase-locked loop)获取微电网电压的幅值和相位,并通过低带宽通信LBC(low bandwidth communica⁃tion)实时获取主机输出电流作为参考实现电流源型控制,达到主从机功率均分的目的。尽管主从控制仅需主从机间进行数据交互,在实际微电网工程中,为了实现多个变流器的协调启动、停机和保护,集中式微网中央控制器MGCC(microgrid central controller)仍是不可或缺的重要环节。
围绕主从控制,文献[1]建立了主从结构微网系统的离散时间状态空间模型,讨论了关键控制参数、电源数量和负荷变化对系统稳定性的影响;文献[3]建立了同步旋转坐标系下主机和从机的输出阻抗模型,提出了一种通过量测各变流器外特性并基于Nyquist定理的判稳方法;文献[4]提出的方案中使从机承担本地负载中的不对称和谐波功率,主机仅输出三相对称的有功功率,并采用下垂控制与远方变流器集群实现功率分配;文献[5]提出了一种基于主从-下垂混合控制的离并网无缝切换策略,并网运行时主机采用下垂控制,离网运行时主机缓慢调节下垂系数为零以切换为恒压恒频控制,避免了非计划孤岛时主机控制策略切换引起的电压越限。然而,主从结构需依靠低带宽通信实现从机电流指令的下发,现有研究较少关注低带宽通信时延对于系统稳定性的影响,文献[6]围绕并网运行的交直流侧多机并联系统,讨论了采用主从控制实现直流负荷均分时通信时延对于系统稳定性的影响,并在从机控制中采用电流指令低通滤波加直流电压前馈的方法以提升系统稳定裕度。针对采用主从结构的独立交流微电网,同样有待于对通信时延进行建模并分析其对系统稳定性的影响。另一方面,负荷扰动暂态过程中从机的功率跟踪能力在现有研究中鲜有报道。随着并联变流器数量的增加,占系统容量比率较小负载扰动也可能超出主机容量范围,若从机响应速度较慢将会导致主机出现过载故障。因此,负载扰动下从机功率跟踪能力有待增强。
独立交流微电网的黑启动策略可分为串行恢复和并行恢复[15]。对于采用主从控制储能系统作为主电源的简单交流微网,应以储能系统作为参考电源实现黑启动。文献[15-18]中所提黑启动策略在黑启动电源启动前均需将负荷切除,待电源启动后再将负荷分级投入。然而,在偏远地区的独立微电网中,负荷开关分布较为分散,难以独立控制,且分级投入时间较长;若直接投切总负荷开关,由于电力电子装置过载能力较低,则可能造成微电网出现过电压和过电流,造成黑启动失败。因此,带载黑启动成为一种折中方案。主从结构下,如何实现多机并联黑启动的协调控制,以缩短黑启动时间、减小配变励磁涌流、维持系统电压和频率稳定,成为亟待解决的问题。
针对上述问题,首先建立了主从结构下独立交流微电网的状态空间模型,分析了主要控制和通信参数对系统稳定性的影响;然后在传统主从控制基础上提出了两种附加控制策略,一是增加从机功率跟踪性能的控制方法,二是实现主从结构下微电网黑启动的控制策略;最后通过实验对上述控制方法进行了验证。
1 主从结构下交流微电网建模与稳定性分析
1.1 主从控制结构
主从控制结构如图2所示,其中各变量下标_m表示主机相关变量,下标_s表示从机相关变量。主机根据电压参考u d_ref和u q_ref实现恒压恒频控制。其中,G u_m为主机电压外环控制器,采用比例积分PI(proportional integral)控制(kpu,k iu);Gi_m为主机电流内环控制器,采用PI控制(kpi,kii)。从机通过低带宽通信获取主机采样获得实际输出电流的d轴分量i L1_d_m和q轴分量i L1_q_m,经过低通滤波环节GLPF_i_ref后分别得到d轴电流参考i d_ref_s和q轴电流参考i q_ref_s,进而通过电流环实现恒流控制。G i_s为从机电流内环控制器,采用PI控制(kpi,kii)。i L1_d_m、i L1_q_m和i L1_d_s、i L1_q_s为主机和从机L1电流在d、q坐标系的值,i L2_d_m、i L2_q_m和i L2_d_s、i L2_q_s主机和从机L2电流在dq坐标系的值,uC_d_m、uC_q_m和uC_d_s、u C_q_s为主机和从机电容C电压在d、q坐标系的值,e d_m、e q_m和e d_s、e q_s为主机和从机调制参考在d、q坐标系的值,eα_m、eβ_m和eα_s、eβ_s为主机和从机调制参考在αβ坐标系的值,ω为系统角频率。
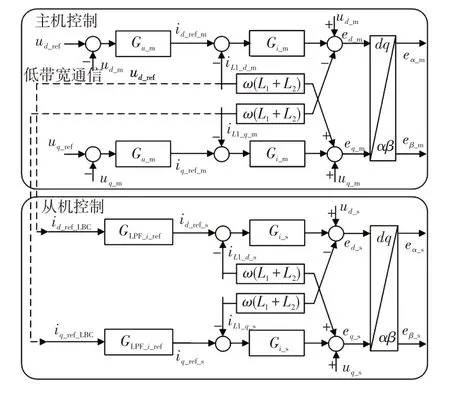
图2 主从控制结构Fig.2 Structure of master-slave control
1.2 主机状态空间模型
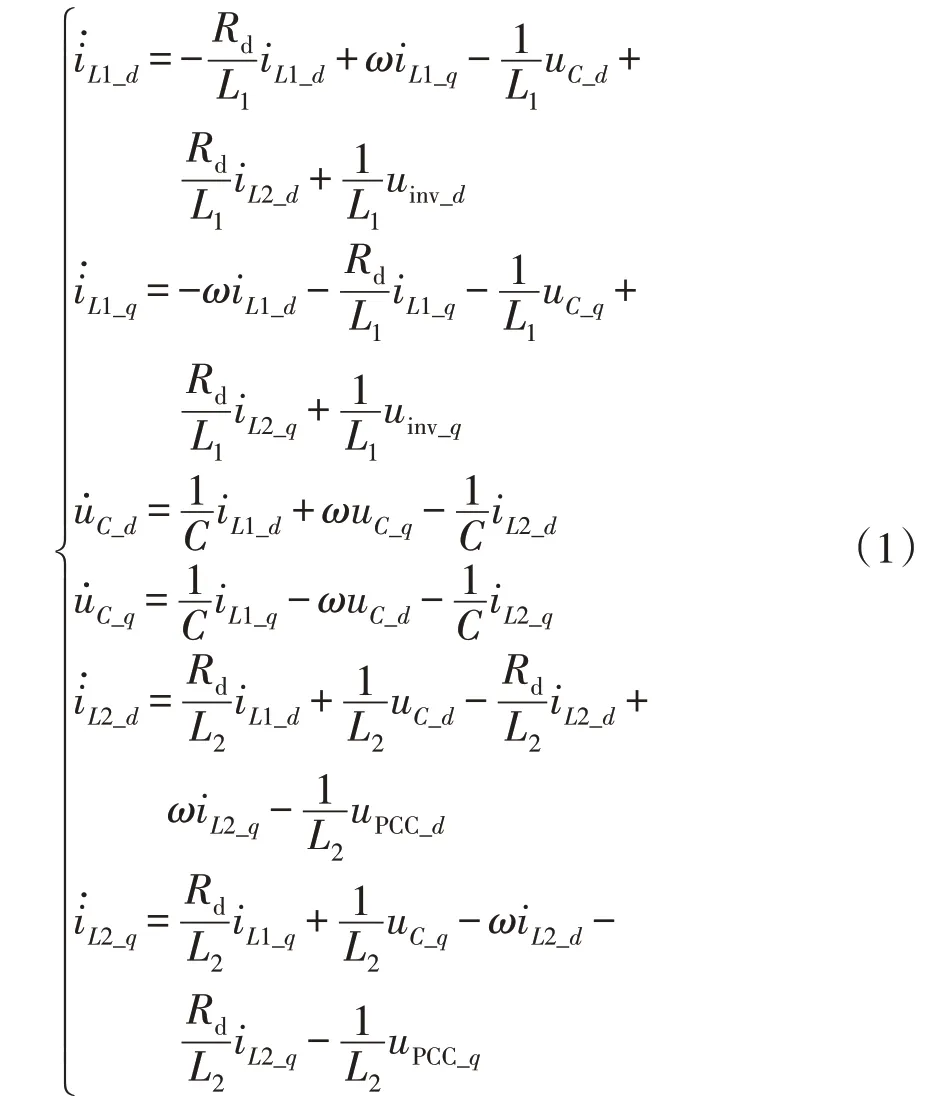
建立主机在dq坐标系下的状态空间模型。LCL滤波器的状态空间方程可表示为式(1),1.2节中各变量若未经说明均为图2中主机相关变量,省略了下标_m。其中,i L1_d、i L1_q和i L2_d、i L2_q为电感L1和L2的d、q轴电流,uC_d、uC_q为电容C的d、q轴电压,uinv_d、uinv_q为变流器的d、q轴端口电压,uPCC_d、uPCC_q为PCC点的d、q轴电压,ω为系统角频率。
电压电流控制器的状态空间方程可表示为
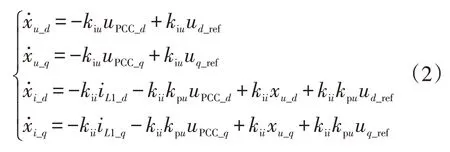
式中:x u_d、x u_q分别为主机d、q轴电压外环的积分器输出;x i_d、x i_q分别为主机d、q轴电流内环的积分器输出。
采样与调制延时通常简化为一阶滞后环节1/(1.5Ts+1),Ts为开关周期,其状态空间方程为
式中,R d为图1中电容C的电阻。
联立式(1)~(3),选取状态变量xmaster=[i L1_d,i L1_q,uC_d,uC_q,i L2_d,i L2_q,xu_d,xi_d,x i_q,uinv_d,uinv_q]T,输入变量umaster=[uPCC_d,uPCC_q,ud_ref,u q_ref],得到主机的状态空间模型为

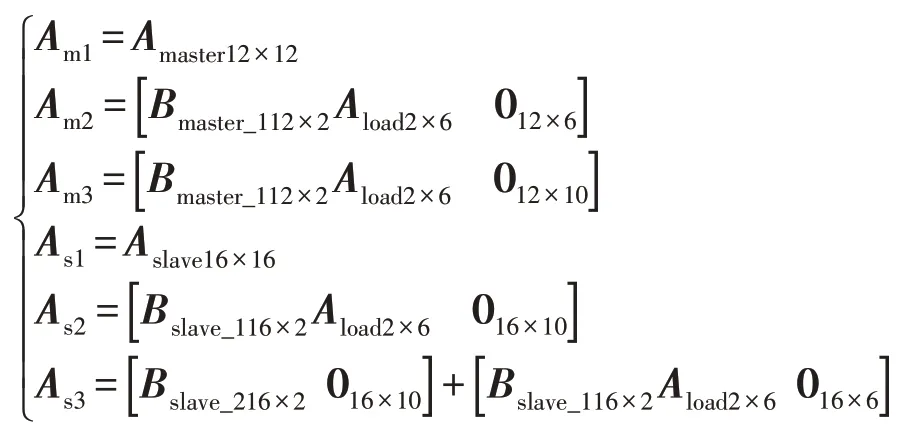
式中,Amaster和Bmaster的表达形式见附录C。
1.3 从机状态空间模型
建立从机在dq坐标系下的状态空间模型,其LCL滤波器状态空间模型与主机一致。1.3节中各变量若未经说明均为图2中从机相关变量,省略了_s后缀。采用零阶保持器表示低带宽通信时延,并进行二阶Pade逼近,并将其记作GCAN,其表达式为
式中,TLBC为低带宽通信周期。
将上述传递函数转换为状态空间能控标准型如下:
式中,xLBC、uLBC和yLBC分别为低带宽通信延迟的状态变量、输入变量和输出变量。
对于式(6)所示系统,输入变量为主机L1的dq轴电流i L1_d_m、i L1_q_m,可表示为
式中,xi_d_LBC_1、xi_q_LBC_1和xi_d_LBC_2、x i_q_LBC_2分别为主机1和主机2的d、q轴电流值。需要指出的是,下述变量下标中的1和2分别表示主机1和主机2。
从机电流指令低通滤波环节的状态空间方程可表示为
式中:TLPF_i_ref为从机电流指令低通滤波时间常数;i d_ref和i q_ref分别为从机d、q轴参考电流。
选取状态变量xslave=[i L1_d,i L1_q,uC_d,u C_q,i L2_d,i L2_q,xi_d_LBC_1,x i_q_LBC_1,xi_d_LBC_2,xi_q_LBC_2,i d_ref,i q_ref,x i_d,x i_q,uinv_d,uinv_q]T,输入变量uslave=uPCC_d,uPCC_q,i L1_d_m,i L1_q_m],得到系统的状态空间模型为

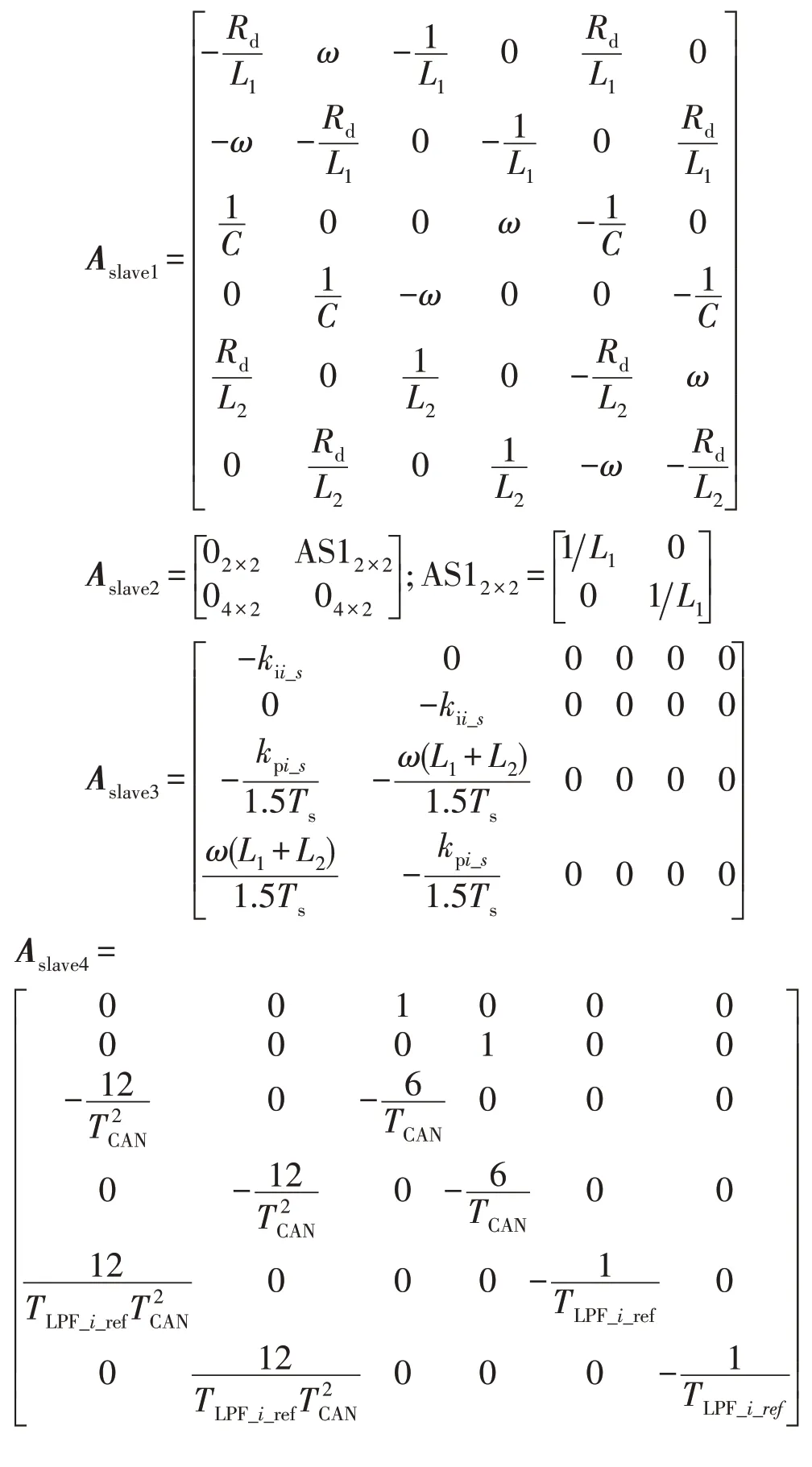
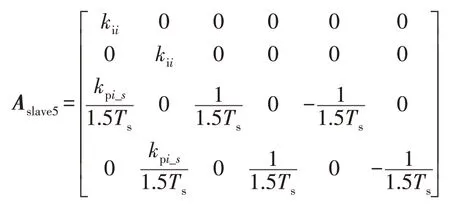
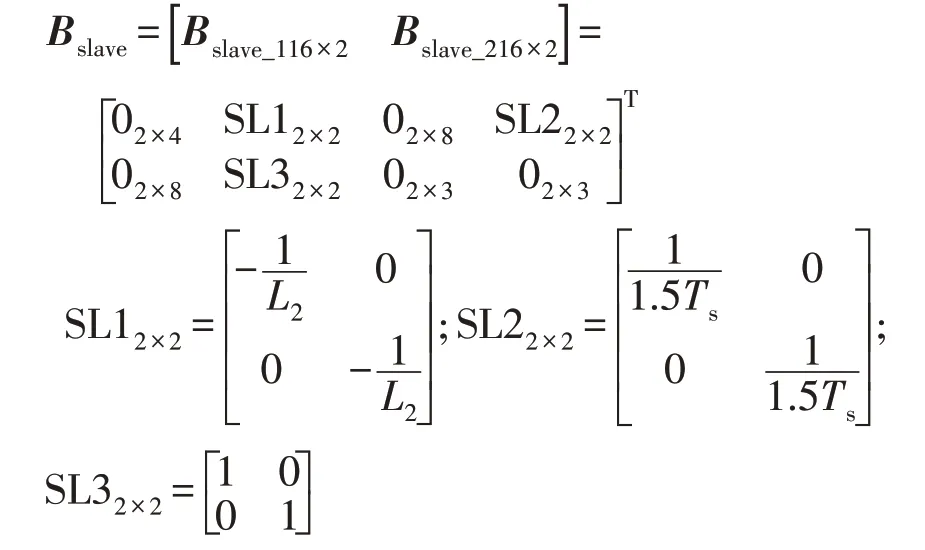
式中,Aslave和Bslave的表达形式见附录A。
1.4 负载状态空间模型
当负载为阻感性负载时,PCC电压表达式为

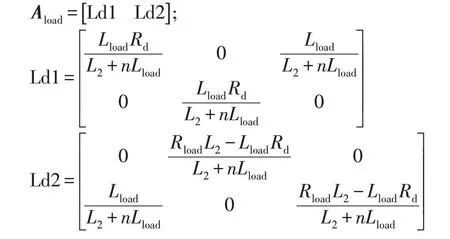
式中:下标_s_1,…,_s_n表示从机1,…,n的相关变量;n为并联运行的从机数量;Aload的表达形式见附录B。
上述变量的具体含义见1.1节。
1.5 独立交流微电网状态空间模型
综合上述主机、从机和负荷状态空间模型。多机并联条件下的状态空间模型为

式中,xsystem、usystem、Asystem和Bsystem的表达形式见附录C。
1.6 主要控制参数对系统稳定性影响分析
根据1.2至1.5节所述建模方法,建立主从结构下由3台储能变流器并联运行构成的独立交流微电网状态空间模型。基准参数如表1所示。针对各参数对系统稳定性的影响进行分析时,基准参数除特殊说明外均采用表1所示参数,表1中kpu_m、kiu_m和kpi_m、kii_m分别为主机电压外环和电压内环的比例、积分系数;kpi_s、kii_s分别为从机电压内环的比例、积分系数。
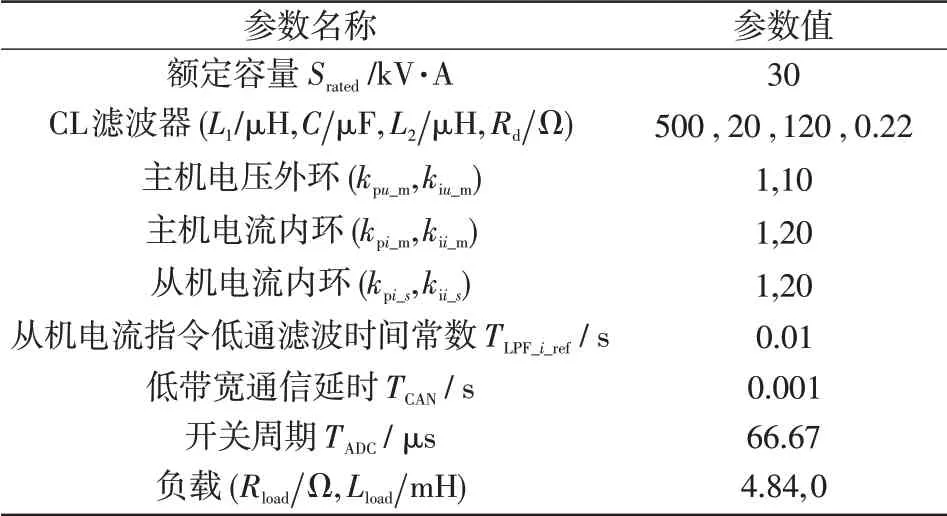
表1 储能变流器参数Tab.1 Parameters of power converter in energy storagesystem
如图3(a)所示,随着主机电压外环比例系数kpu_m从0.1以步长1增加至8,特征值Eig.1和Eig.2逐渐向虚轴移动,阻尼比减小。如图3(b)所示,随着主机电流内环比例系数kpi_m从1以步长1增加至8,特征值Eig.1和Eig.2逐渐向虚轴移动,阻尼比减小。如图3(c)所示,随着从机电流内环比例系数kpi_s从1以1为步长增加至5,主导特征根Eig.3和Eig.4阻尼比减小。如图3(d)所示,随着从机电流指令低通滤波时间常数TLPF_i_ref以1 ms为步长8 ms变化至1 ms,特征值Eig.5和Eig.6阻尼振荡频率增加,阻尼比减小。如图3(e)所示,随着低带宽通信周期TLBC从1 ms以步长1 ms变化至10 ms,特征值Eig.6向靠近虚轴的方向移动,特征值Eig.7和Eig.8阻尼比减小,阻尼振荡频率先增大后减小。
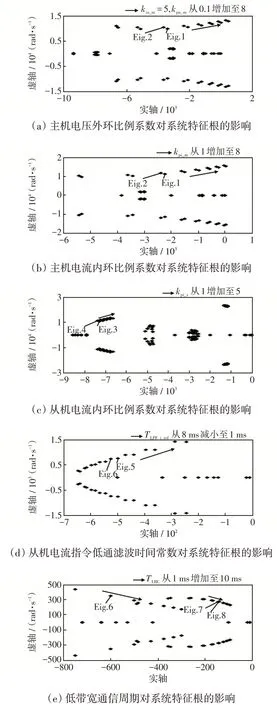
图3 各参数变化时系统特征根分布Fig.3 Distribution of eigenvalues of system with variation of different parameters
为了进一步验证所本文所建立状态空间模型的正确性,根据表1所示参数在Matlab/Simulink软件中搭建了微网电磁暂态仿真模型。如图4所示,在2 s时刻使电压参考u d_ref增加阶跃输入(311~331 V),随着TLPF_i_ref的减小,系统的动态响应加快,超调量增加。状态空间模型阶跃响应与电磁暂态仿真模型阶跃响应基本一致,验证了本文所建立状态空间模型的正确性。
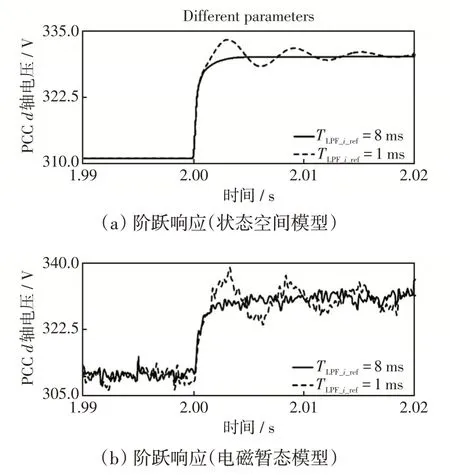
图4T LPF_i_ref变化时系统动态响应Fig.4 Dynamic response of system with variation of T LPF_i_ref
在表1所示参数的基础上,依据所建立的状态空间模型,2 s时刻使负载Rload发生阶跃变化(4.84~2.42Ω),得到主机d轴输出电流i L2_d_m和从机d轴输出电流i L2_d_s1的暂态响应曲线如图5所示。可见,当TLPF_i_ref较小时,负载阶跃后主从机输出电流之间存在明显振荡;随着TLPF_i_ref的逐渐增大,负载阶跃后主从机输出电流振荡减小,但从机功率跟踪速度变慢,主机在暂态过程中提供了大部分负荷功率,功率均分较慢。
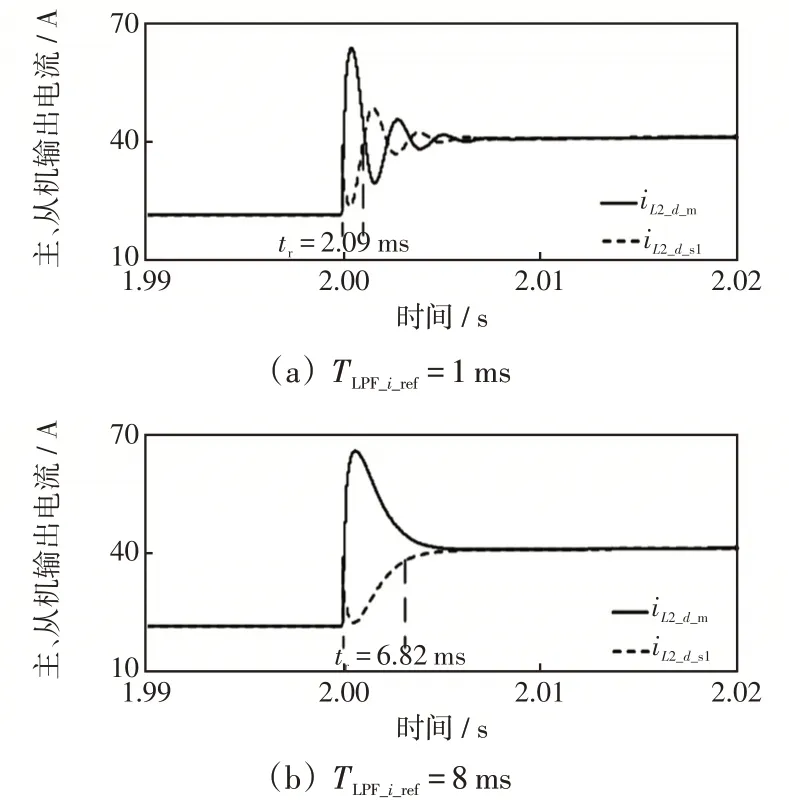
图5T LPF_i_ref变化时电流分配Fig.5 Current sharing with variation of T LPF_i_ref
2 附加控制策略
2.1 从机附加控制策略
由第1节的分析可知,随着从机电流指令低通滤波时间常数的增加系统稳定性增强。然而,在出现负荷扰动时,从机动态响应较慢,主机承担了大部分暂态功率。因此,本文提出了一种从机的附加控制策略如图6所示。
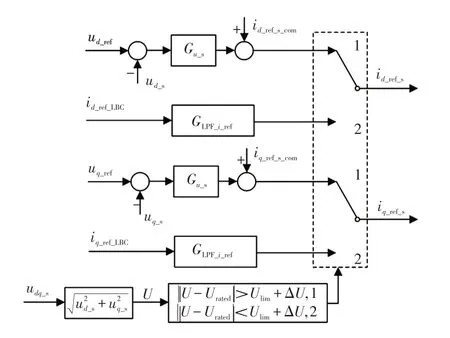
图6 从机附加控制策略Fig.6 Slave converter under additional control
所提附加控制策略可概述如下:
(1)从机根据公式(12)计算交流电压幅值U,并与额定电压Urated比较,当U与Urated偏差大于Ulim+ΔU时认为电压越限;当U与Urated偏差小于Ulim-ΔU时认为电压回到合理范围。其中,ΔU为防止控制模式频繁切换加入的滞环。

式中,u d_s和u q_s分别为从机输出电压的d、q轴分量。
(2)当从机检测到交流电压幅值在合理范围之内时,采用经过低通滤波的主机L1dq轴电流作为电流内环控制的参考(通道2),更新补偿量i dq_ref_s_com使其与变量i dq_ref_s一致,清空1通道电压外环的积分。
(3)当从机检测到交流电压幅值越限时,快速投入dq轴电压外环控制(通道1)。此时从机相位仍通过PLL获取,电压控制器Gu_s应与主机电压控制器Gu_m参数一致以提高暂态负荷分配的一致性。同时,还需在电压外环输出处增加补偿量i dq_ref_s_com。
2.2 主从结构下微电网黑启动策略
包含采用主从控制的多储能变流器的微电网面临带载黑启动的问题。为此,本文提出了一种主从结构下的黑启动策略如图7所示,主要概述如下:
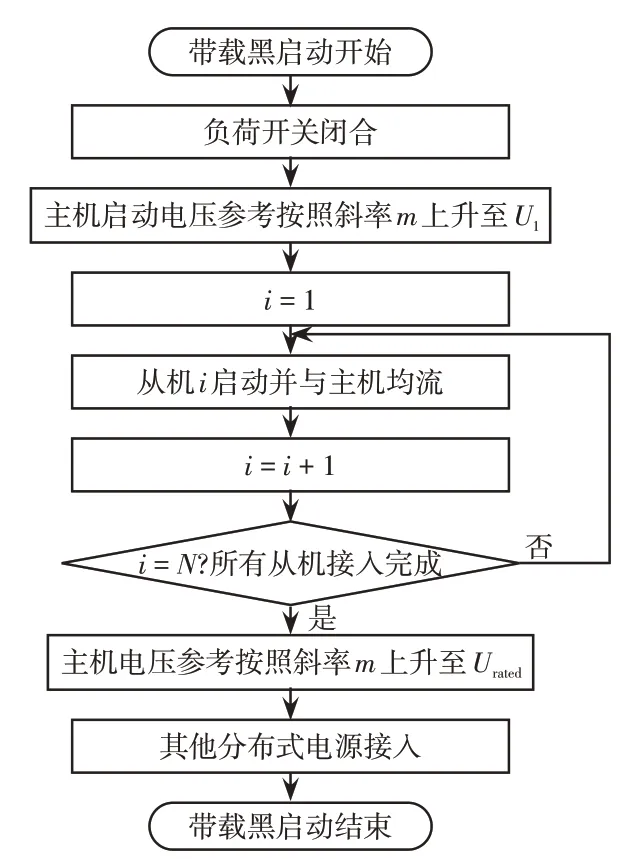
图7 带载黑启动流程Fig.7 Flow chart of black-start scheme with connectedload
(1)当微网得到黑启动指令时,保证负荷开关闭合,主机按照式(13)中[0,T1]时段所示输出电压,确保配电变压器零起升压功能。考虑到变压器零起升压时,若母线电压幅值增长过快,可能导致变压器磁通保护甚至过饱和的现象,引发较大的励磁涌流。斜率m的整定方法应参照文献[18],避免黑启动过程中变压器进入饱和区。
式中:U1为主机输出相电压峰值;Urated为主机额定电压;T1、T2和T3分别为系统不同阶段的截止时间与起始时间。具体的阶段请见上下文。
(2)由于旋转电机类负荷通常具备控制系统,需等待系统电压建立后才会投入运行。假定软启动过程中仅包含阻性负荷,考虑到主机最大输出电流,由式(14)对主机输出相电压峰值U1进行整定。其中Imax主机可输出的最大线电流峰值,Rload为估计的负载电阻。主机电压上升至U1后维持该电压,在[T1,T2]时段等待各从机接入并实现均流。

(3)所有从机均接入完成后,主机电压参考继续以斜率m上升([T2,T3]时段),直至上升至额定电压Urated并维持该电压([T3,+∞]时段)。
(4)系统电压恢复至额定值后,其他分布式电源以系统电压为参考投入运行。
3 仿真与实验验证
3.1 实验系统
独立交流微电网中基于主从结构的多储能变流器并联运行实验系统结构与图1一致。其中,各储能变流器均采用T型三电平结构,其具体参数如表1所示;低带宽通信采用控制器局域网络CAN(controller area network),通信周期为1 ms。
3.2 实验工况一
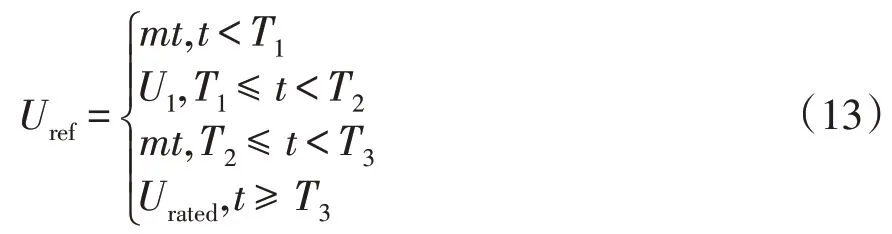
实验工况一用于验证第1节对于主从结构多储能变流器并联系统稳定性分析的相关结论。采用主从结构的3台储能变流器并联运行,实验结果如图8所示。其中,图8(a)中设置参数TLPF_i_ref为1 ms,t1时刻投入有功功率负载18 kW,主机和从机间出现输出电流的振荡,振荡周期约为2 ms,与图5所示理论分析接近;图8(b)中设置参数TLPF_i_ref=10 ms,t1时刻投入有功功率负载18 kW,系统稳定性得到提升,但暂态过程中主机承担了大部分负荷功率,易导致主机过流故障。需要指出的是,图8(b)中从机1C相电流和从机2C相电流暂态过程中的曲线高度重合,故图中不具体细分。
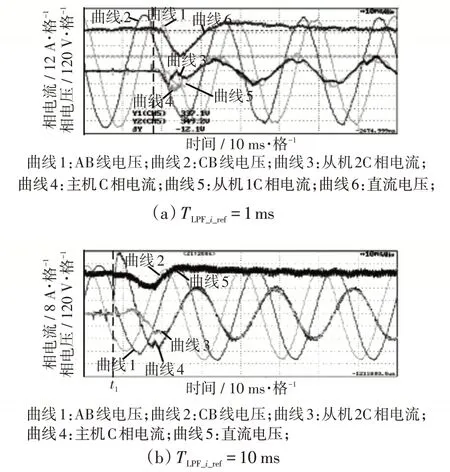
图8 工况一实验结果Fig.8 Experimental results in Case 1
3.3 实验工况二
实验工况二用于验证2.1节所提从机附加控制策略。实验结果如图9所示,t1时刻投入负载30 kW。与图8所示实验结果相比,3台储能变流器同时响应负荷扰动,电压跌落减小,系统稳定性得到提升。
图9 工况二实验结果Fig.9 Experimental results in Case 2
3.4 实验工况三
实验工况三主要用于验证2.2节所提微电网带载黑启动策略。采用主从结构的两台储能变流器并联运行,经隔离变压器带12 kW阻性负载黑启动,相关参数如表2所示,实验结果如图10所示。首先,主机带负荷实现零起升压,图10(a)中t1时刻从机接入并与主机均流;随后,主机参考电压逐渐上升至额定值,如图10(b)所示;最后,两台储能变流器带负荷稳定运行,如图10(c)所示。
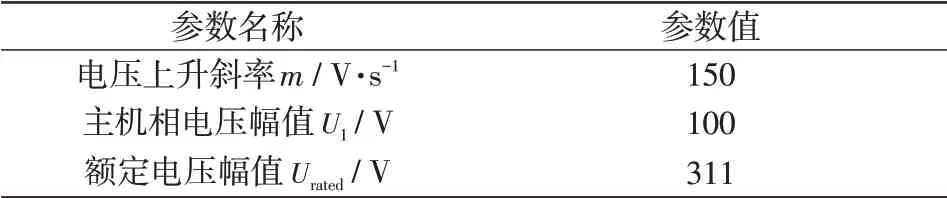
表2 黑启动实验参数Tab.2 Parameters of black-start experiment
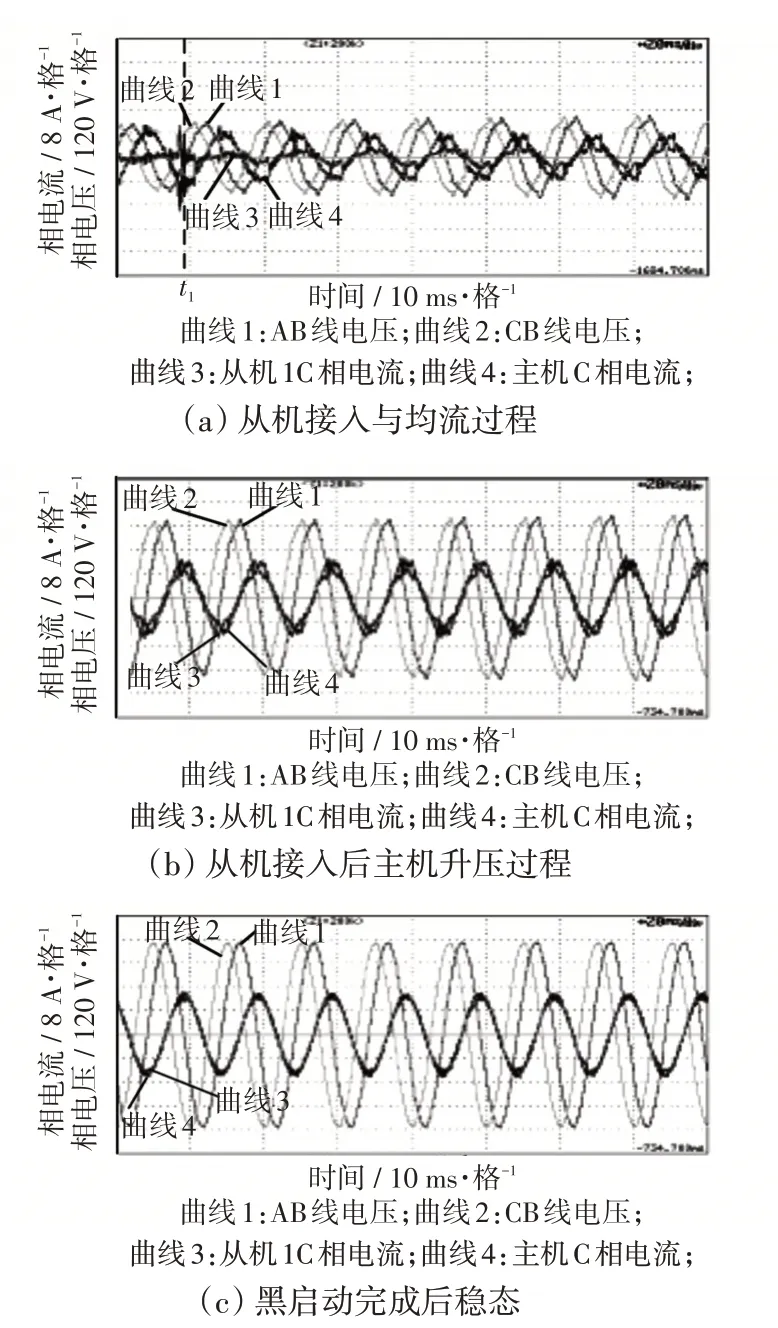
图10 工况三实验结果Fig.10 Experimental results in Case 3
4 结语
本文围绕基于主从结构的多储能变流器并联系统,首先针对传统的主从控制方法建立了系统状态空间模型并分析了主要控制与通信参数对系统的影响。其中,主机电流滤波时间常数对系统稳定性具有重要影响,其取值过小会引发主从机功率振荡,过大则会导致从机响应过慢,负载变化时易引起主机过流故障。其次,针对从机动态响应较慢的问题提出了一种附加控制方法,使从机在暂态过程中加入电压外环,与主机共同承担负荷扰动,提升了系统的稳定性。最后,针对独立交流微电网带载黑启动问题,提出了一种主从结构下的黑启动策略。实验结果验证了本文所建立状态空间模型的正确性,表明本文所提附加控制策略能够有效解决传统主从控制中存在的问题。
附录A:
Aslave可表示为
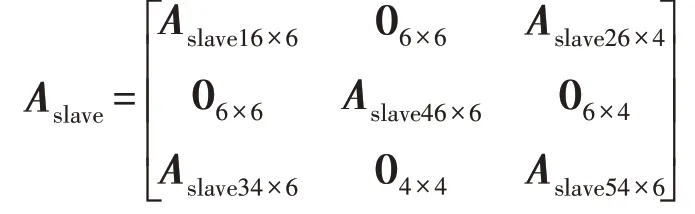
式中各矩阵的表达式为
Bslave可表示为
附录B:
Aload可表示为
附录C:
Asystem可表示为
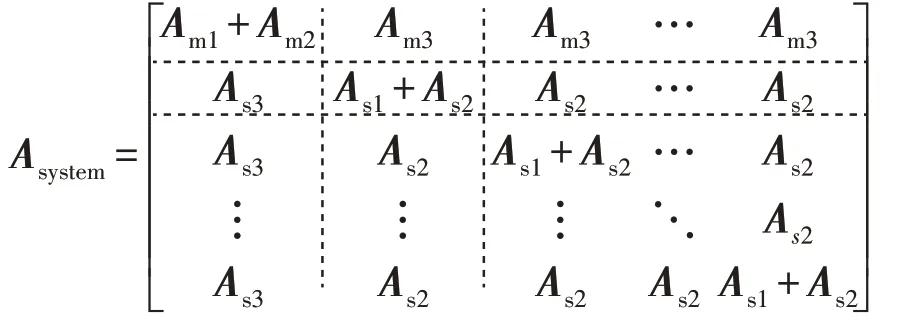
式中Am1、Am2、Am3、As1、As2和As3可表示如下:

Bsystem可表示为
猜你喜欢
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
煤气与热力(2021年6期)2021-07-28
铁道机车车辆(2021年3期)2021-07-12
煤气与热力(2021年4期)2021-06-09
疯狂英语·新悦读(2020年6期)2020-06-28
电子制作(2019年10期)2019-06-17
煤矿机电(2019年2期)2019-04-17
探测与控制学报(2015年4期)2015-12-15
汽车电器(2014年5期)2014-02-28
