
电动车用永磁同步电机无传感器控制技术综述
2022-07-28 09:12涂志文蒋成明涂群章朱昌林
微电机 2022年6期
涂志文,蒋成明,涂群章,朱昌林,黄 皓
(陆军工程大学 野战工程学院,南京 210007)
0 引 言
近年来,全球面临石油能源紧缺,大气环境污染严重,气候变暖等挑战,为了应对这类挑战,实现人类对能源的可持续性发展,开发新的能源和研发新能源交通运输工具已迫在眉睫。在大型轨道交通运输领域,传统式燃煤列车已经被时代所淘汰,随之而来的是电气智能化的高铁;在城市交通领域,随着我们经济生活水平的不断提高,人们购买私家车的欲望愈发强烈,因此,汽车的产量与销量逐年增多,加剧了能源的紧缺,造成了空气环境的污染以及导致城市交通拥堵等问题。因此,全球许多国家和地区都开始大力号召各自国家的车企致力于开发新能源汽车来代替传统燃油汽车,同时号召各国民众购买新能源汽车,并给予一定的购车补贴,从而缓解能源的紧张以及减少环境污染。
目前新能源汽车主要根据动力的来源分为以下三类[1-2]:(1)燃料电池汽车;(2)混合动力汽车;(3)纯电动汽车。无论上述哪种新能源汽车,都离不开驱动电机。驱动电机作为新能源汽车中的核心部件,实现其可靠控制是极为重要的。因此众多学者对电动车用电机控制技术进行了大量相关性研究,并提出了一些控制技术方法。
本文第一章介绍电动车中关键控制技术现状,第二章研究PMSM无传感器控制技术国内外的现状与进展,第三章研究各种无传感器控制技术的特点、工作原理以及适用的环境,第四章对无传感器控制技术的未来趋势与展望,最后对全文进行总结。
1 电动车驱动电机控制技术现状
目前,市场上电动汽车驱动电机常用的电机有永磁同步电机、直流电机、交流异步电机以及开关磁阻电机等[3-5]。四种电机性能对比如表1所示。
尿液各项检测结果见表1所示,可见糖尿病肾病组α1-MG、β2-MG、TRF、mAlb和 Cys-C 检测结果均明显高于健康组,两组比较,差异有统计学意义(P<0.05)。
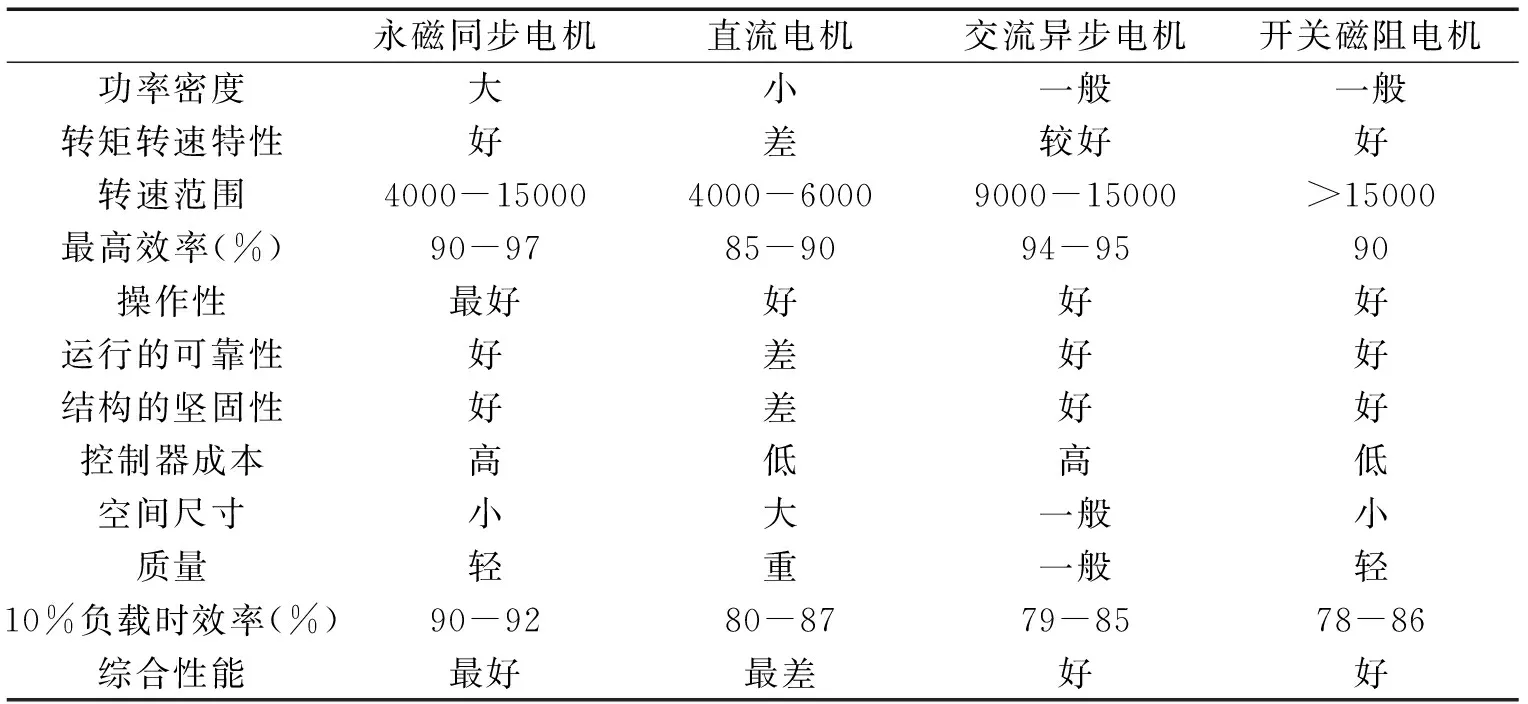
表1 四种不同电机驱动性能参考
经过全方面综合性能分析可知,永磁同步电机是此四种电机中优势最明显的,也因此永磁同步电机已被国内外众多著名汽车企业广泛采用,作为他们电动汽车的驱动电机[6]。其中国内汽车公司包括比亚迪汽车公司、吉利汽车公司、长城汽车公司以及北汽集团等均有采用永磁同步电机作为他们电动车系列的驱动电机,除此之外,国外有大众汽车集团、福特汽车公司以及日本的丰田汽车公司、本田汽车公司等也采用永磁同步电机作为他们电动车系列的驱动电机。
实践证明,只要对接好市场,品质过硬,土特产也可以卖上好价钱。在南方某省,曾经10元一根也难卖的竹子,切分成一节节、用来做竹筒饭,一下人气蹿升,将其打磨成纤细的竹丝,又成了瓷胎竹编的好材料;土猪肉搭上直播快车,网友不仅能看到养殖环境和烹饪过程,还能邀请好友观看和进行线上下单;荔枝遇上丰产年,普通品种量大滞销,但在一些主产地,科技专家和新型经营主体一起想办法,让新品种荔枝走俏市场。
1)低密度负荷区10 kV线路的最大供电半径受到负荷分布状况的显著影响,居民负荷越集中于线路的末端,最大供电半径越小。
1.1 直接转矩控制技术
直接转矩控制技术最早是由德国M. Depenbrock教授和日本学者L Takahashi于20世纪80年代提出,并由德国M. Depenbrock教授推广到弱磁控制领域[11-12]。其基本原理是将电机与逆变器结合为一个整体,通过检测电机定子端电压和电流,依据瞬时空间矢量理论,计算电机磁链和转矩,并且根据所测值与参考值之间的差值,来实现对电机磁链和转矩的直接控制。整个过程不存在解耦,提升了控制系统的响应速度。但是一旦转矩发生瞬时变化,在永磁同步电机中,由于永磁体磁场一直存在,无法有效地控制转矩的瞬时变化,而需要借助其他辅助控制技术,因此控制的稳定性会严重受到干扰,因此,现如今不适合应用在安全性要求较高的电动汽车上,适用于一些要求较低的行业。
1.2 矢量控制技术
矢量控制技术最早是由日本学者Blaschke在《富士时报》提出,随后德国和美国的学者也相继对其开展研究,且发表许多相关文章。矢量控制基本原理是以Clark、Park坐标变换理论为基础,对自然坐标系下三相定子的电压、电流以及磁链进行坐标变换,得到同步旋转坐标系模型,再对同步旋转坐标系下的电机定子电流进行大小与方向上的控制,实现了定子电流分量在直轴和交轴上的解耦,进而实现电机电磁转矩控制的目的[13]。目前常用的矢量控制技术有id=0控制、功率因素cosψ=1控制、转矩电流比最大控制以及弱磁控制[14-15]。
矢量控制技术在本质上与直接转矩控制无异,均为通过对转矩进行控制,但是矢量控制技术应用在永磁同步电机上可使其性能媲美与直流电机,矢量控制技术具有宽调速、高精度以及优良的动态特性等诸多优点,尤其是近年来的发展,其优势更为明显,也因此得以广泛的应用,常用于航空航天、数控机床以及电动汽车等高要求的领域。
1.3 变压变频控制技术
变压变频控制是以频率和电压为控制量,在变压变频调节器中输入参考电压和频率,由逆变器产生一个交流变换的正弦电压,将其施加在电机定子绕组上,使之保持在规定的电压和频率下,从而保证了电机磁通的不变,然后利用控制电机转差频率来控制转矩和转速[16]。但是变压变频控制属于开环控制,因此,没有反馈调节,不能实现实时监测电机的运行状态,除此之外,变压变频控制的动态特性较差,转矩响应迟钝,且在低速运行调速性能极差,因此,不太适合应用于电动汽车上。
2 PMSM无传感器控制技术国内外现状
20世纪70年初期无位置传感器控制技术首次由国外学者J.R.Frus与C.Kuo等人提出, J.R.Frus与C.Kuo等人并将其应用在交流异步电动机上,成功实现了对交流异步电动机无位置传感器控制。随着PMSM的进一步发展,在20世纪80年代末期国外学者尝试将无位置传感器控制技术应用于永磁同步电机,并且成功的实现了对永磁同步电机的无位置传感器控制。再后来,随着电力电子技术、自动控制理论、微型计算机等进一步发展,无位置传感器控制技术得到前所未有的发展。
1975年,美国Alberto Abbondanti教授[17]提出利用电机转差频率信息来获取转子的位置以及转速,但是估算精度比较差,效果不够理想;1979年,Ishida.M等人[18]提出利用转子齿谐波来获取转速信息,但只适用于转速较高的情况下,低速情况下无法满足;1989年,Jones.L.A[19]等利用状态观测器首次成功实现了对永磁同步电机位置的估算,实现了多年来许多学者对无传感器控制技术应用在永磁同步电机的梦想。
时至今日,国外诸多著名大学、研究机构等对永磁同步电机无位置传感器控制技术进行了大量研究,并且发表许多高水平学术论文。美国Wisconsin-Madison大学的Robert D. Lorenz教授[20]作为世界著名电机驱动系统领域的首席专家,1993年,他和他的团队于提出在电机转子处于低速度时,可以通过注入高频电压信号注入法或者高频电流信号注入法来检测电机转子位置和转速等信息,并且发表多篇相关性学术论文,至今保持着该领域研究的最前沿。1995年,韩国首尔大学Seung-ki Sul教授[21]也致力于永磁同步电机无位置传感器控制的研究并做了许多相关性的工作,发表了许多无传感器控制方面的学术论文和著作。除此之外,德国Wuppertal大学Joachim Holtz教授、意大利Alfio Consoli教授,澳大利亚新南威尔士大学的M.F.Rahman教授等人从多方面入手对永磁同步电机无位置传感器控制进行了大量的研究工作,并且取得了一定的学术成果。
国内对永磁同步电机无位置传感器控制技术的研究相比于国外稍晚些,国内最早是20世纪90年代开展研究的,2003年,清华大学的梁艳、李永东等人[22]提出电机静止状态时可通过施加不同的电压脉冲来检测转子初始位置的方法,并且发表了多篇学术论文取得了一定的研究成果;2006年,浙江大学贺益康教授等人[23]研究了基于电机凸极效应的无位置传感器控制技术并且发表多篇相关学术论文;2009年,中国矿业大学谷善茂等人[24]研究并且提出了基于扩展卡尔曼滤波的PMSM无位置传感器控制技术;除此三所高校的教授在研究关于PMSM无位置传感器控制外,国内其他高校如上海交通大学、中国科学院大学、华中科技大学、西安交通大学、西南交通大学以及上海大学等均有团队研究无位置传感器控制技术,并且取得了重大研究进展和丰硕的学术成果。
3 无传感器控制技术综述
本文简述永磁同步电机无传感器控制技术是采纳德国Wuppertal大学Joachim Holtz教授提出的分类方法:一是基于电机基波模型的方法;二是基于电机凸极效应的方法[25]。第一类主要适用于电机转速处在中、高速阶段,易实现且可靠性高,但在零、低速阶段不适合,容易受干扰,稳定性不好。第二类因为不受电机参数的影响,所以适用于零速和低速。
3.1 基于电机基波模型的方法
人类社会迈入网络时代之后,互联网已经与人类的日常生活、学习密切相关,也改变了社会的样貌和诸多行业的业态、具体形态等。它们皆因技术驱动的力量发生着翻天覆地的变化。
不局限于训练学生听说读写,综合调动他们的包括观察、想象、理解、表达等在内各种能力,引导学生用多种艺术方式(戏剧、绘画、音乐、语言)创造性回应阅读的文本。
(1)直接计算法
早春的花,带着风寒,飘摇在车窗外。蓝天如梦一般,织成一张网,鸟儿斜飞在自由的天空,飞进水仙芝的梦里。她依偎在这个陌生男人的怀里,做着自己的梦。
直接计算法是一种通过直接利用电机定子的电压和电流,再根据定子的电压以及电流计算电机定子磁链方程、转子磁链方程以及反电动势矢量方程,从而得到与转子相关的信息[26]。其中包括转子速度以及转子位置角度,该方法简单,容易实现,动态响应特性好。其工作原理如图1所示。
(2)反电动势积分法
从肩挑斧凿到自动化生产线;从简易帐篷、土坯房到楼房林立;从产能零的突破到1万吨、4万吨,再到10万吨、20万吨,甚至100万吨、200万吨,乃至2017年500万吨。“盐湖人”给行业带来了无数的震撼和惊叹,激起了一次又一次建设浪潮。
反电动势积分法与直接计算法的原理类似,它也是直接利用电机定子的电压与电流,再结合电机数学模型求出反电动势,其中反电动势包含了与转子速度和位置相关的信息,再对反电动势进行微积分处理后进行反正切函数运算,得到转子速度和位置的估计值[27]。
富家坞矿石中铜矿物大部分都是黄铜矿,另有少量的斑铜矿、辉铜矿、铜蓝等;钼矿物主要是辉钼矿;其他金属矿物有黄铁矿以及微量的赤铁矿、磁铁矿、闪锌矿、方铅矿等。脉石矿物以石英、长石为主,其次有方解石、绿泥石等。
以上两种开环控制算法都没有反馈校正回路环节,过于依赖电机的参数,鲁棒性差,估算误差明显,主要应用于精度要求不高的交流电机伺服控制系统,现在比较常用的、且使用较广的是闭环控制算法,闭环控制算法存在反馈调节机制,外界参数的干扰对其影响较小,并且它可以通过自身的反馈调节校正外界参数变化对它的不利影响,因此,闭环控制算法鲁棒性更好,现已经广泛应用于高精度伺服交流电机控制系统中,目前常用的几种闭环控制算法如下[28]。
根据蓄电池容量要满足汽车续驶里程的要求这一原则,采用等速(60km/h)原理可求得蓄电池消耗的总能量[6]。为了防止过放电对蓄电池的伤害,规定电池的放电深度为DOD=80%[7]。由以下公式确定电池容量:
(2)扩展卡尔曼滤波器算法(Extended Kalman Fliter,EKF)
对于永磁同步电机而言,电机控制技术是电机系统的神经中枢,控制着电机的一切,在电动汽车中起着至关重要的作用。随着电力电子技术、计算机技术等新兴科技的向前发展,电机控制关键技术的发展也得以深入[7-8]。就目前而言,常用电机控制技术主要以下有三种,即直接转矩控制、矢量控制以及变压变频控制[9-10]。
(1)滑模观测器算法(Sliding Mode Observer,SMO)
模型参考自适应算法最早于20世纪50年代后期首次提出,目前该算法是一种常用的无传感器控制算法,其结构主要由参考模型、可调模型以及参数自适应律三部分组成[40],如图3所示,其工作原理是先对转子位置进行假设,再通过参考模型计算该时刻电机的电压与电流值,然后再实测电机的电压与电流值,将两者进行比较得出差值,该差值便是估计转子位置与实际转子位置的角度差。

图2 传统SMO工作原理图
目前,国内外学者针对采用传统滑模观测器存在的抖振问题,提出了诸多新的方法。文献[31-32]针对采用开关函数sign作滑模面转速会出现高频抖振的现象,提出了采用signmoid函数来替代开关函数,改进控制算法,从而有效地减弱转速的高频抖振。文献[33]则提出采取用分段指数型函数替代开关函数,再通过Lyapunov函数进行稳定性判定,根据判定结果再微调系数,从而达到减弱抖振。北京工业大学张攀[34]等人提出采用双曲正切函数替代开关函数,在通过卡尔曼滤波原理对反电动势进行滤波,并通过锁相环算法估算转子信息,有效地减弱了原先的高频抖振,实现了对永磁同步电机的无传感器控制。
企业的资金管理如果得不到很好的监督,那么很容易出现差错或者滋生腐败的现象。而财务会计在经济管理中有个重要的作用便是监督,通过监督,企业行为可以得到更好的约束,这对于企业资金在流动的过程中可以更加公开透明,为资金的正常流动提供了重要保障。另一方面,通过财务会计的监督,还能更好的研究企业在进行经济行为活动过程中所存在的问题和不足,能够清楚的看到企业经济行为是否有效以此促进企业的经营发展,这样在最短的时间内企业可以发现经济管理和运行过程出现的问题并及时对其加以解决,进而使得企业的损失降到最低。
3.1.2 闭环控制算法
卡尔曼滤波器算法最早由美国人R.E. Kalman提出,卡尔曼滤波器是在线性最小方差估计的基础上发展而来的一种非线性系统的随机观测器,该算法实时性很好,可实时对数据进行采集并且计算。扩展卡尔曼滤波器法是在卡尔曼滤波器法的基础上改进而来,即卡尔曼滤波器算法在非线性系统永磁同步电机的扩展应用,原理是通过采取电机定子两端的电压、电流信号,借助于基波模型中的电压和机械方程进行递推计算,得到转子位置信息,其中,滤波器增益自身可以随着环境自动调节,再将其与采样信号进一步优化,得到更为确切得转子位置信息,从而实现对电机系统的控制。
文献[35]提出采用扩展卡尔曼滤波器惯量补偿的方法,通过扩展卡尔曼滤波器获取电机转子的信息,在建立负载扰动观测器,对扰动惯量进行在线辨识并进行补偿。文献[36-38]提出采取基于卡尔曼滤波器算法与滑模控制算法相结合,从而实现对电机转子位置与转速的在线估计,实验结果证明了该理论的可行性。Park Joon[39]为了改进传统卡尔曼滤波器在抗外部干扰能、噪声性能差的缺点,提出在表贴式永磁同步电机上采用弹性扩展卡尔曼滤波和基于无迹卡尔曼滤波的无传感器直接转矩控制方法,实验结果表明弹性扩展卡尔曼滤波和基于无迹卡尔曼滤波的无传感器控制方法优于基于传统卡尔曼滤波的无传感器控制。
(3)模型参考自适应算法(Model Reference Adaptive System,MARS)
滑模控制算法是一种与常规不同的非连续性的控制算法,该算法不依赖于系统的参数与扰动,该算法的原理是依赖于滑模面的选取以及滑模增益的选择,而滑模面其实是由开关函数sign控制,因此,在采用滑模观测器算法时,对开关函数sign、滑模增益的选择需要慎重,增益选择过大会导致电机运行出现严重的抖振[29-30],影响控制系统的鲁棒性。其工作原理如图2所示。
对于电机基波模型的方法,最早是采用开环控制算法,开环控制算法的特点是结构简单,无反馈回路,不需要经过复杂的数学计算,因此开环控制算法动态响应快速,实时性好,目前常用的开环控制算法有以下两种。

图3 MRAS的基本结构
文献[41]为了改进传统滑模控制抗外部干扰能力差、收敛速度慢的缺点,专门提出设计了一种具有快速滑模面的模型参考自适应算法,对控制参数实行在线更新,有效地的拟制了外部干扰以及减小了抖振,最后应用一个产生指数衰减曲线的参考模型来跟踪位置误差,从而实现了对电机的无传感器控制。Ganesan[42]等人提出一种将模型参考自适应控制与二阶滑模控制相结合,已用于高铁的自动运行。文献[43]提出一种新的非线性模型参考自适应反步控制方法,该方法有效地拟制了外部因素对参数的干扰,实现了对永磁同步电机无传感器控制。
(4)人工智能理论估计算法
该算法与传统的控制算法不同,它不需要提前建立控制对象的数学模型,也不受电机参数的影响,具有较好的抗干扰能力。只是该控制算法就目前来说非常前沿,设计的难度很大,成本较高,使用较为困难,应用率较低,研究该算法的学者不在少数。
文献[44]提出了PID控制与带修正因子的模糊控制相结合,将两者的优点集于一体,根据转速偏差选择PID控制还是模糊控制,当选择模糊控制时,对模糊控制器的参数可以利用修正因子进行在线修正。文献[45]针对传统PI控制器无法兼顾动态响应和稳态误差的缺陷,提出将PI控制器与模糊算法相结合,有效地实现对PMSM的高精度控制。
3.2 基于电机凸极效应的方法
该方法主要是针对永磁同步电机转子处于零、低速状态时难于检测或无法检测转子信息而提出的,最早是由美国Robert D. Lorenz教授等人提出,工作原理是通过利用电机的转子凸极效应,向电机的定子绕组注入高频的激励信号,得到的高频响应电流信号就包含了转子的位置信息与转速信息,再对响应电流信号进行解调分析,提取出所需的转子位置信息与转速信息。目前该方法主要包括旋转高频信号注入法、脉振高频信号注入法以及脉振方波高频信号注入法等[46-49]。
(1)旋转高频信号注入法
该方法的基本原理是利用电机的凸极特性,向基波激励上注入一个三相平衡的高频电压激励,其产生的响应电流中包含两种电流分量,其中响应电流负相序分量包含转子信息,再对响应电流负相序分量解调分析得到转子信息。
传统旋转高频信号注入法由于系统延迟、定子电阻和逆变器非线性等因素,导致转子位置估计不准确,为了改善上述缺点,文献[50]提出了一种转子位置估计误差为分为高频相位偏差(HFPD)和定子电阻相位偏差的新型永磁同步电机无传感器转子位置估计策略,该策略有效地消除高频相位非线性引起的相位偏差和减少了由于定子电阻引起的相位偏差,实现了低速永磁同步电机的无传感器控制。文献[51]提出注入双向旋转高频载波电压信号的策略,与传统策略不同是,该策略是同时注入两种电压频率不同以及注入方向不同高频电压信号,对产生响应电流进行解调,得到四个不同的方程,解这四个方程从而得到转子信息。
(2)脉振高频信号注入法
该方法原理与旋转高频信号注入法原理类似,不同之处在于该方法通过向同步旋转坐标系d-q坐标系下的d轴注入幅值大小相同的正弦高频电压信号,之后会在静止坐标系中形成脉振高频信号,在通过对脉振高频电流信号进行解调,得到与转子位置相关的信息。
文献[52]提出将脉振高频电压信号注入α-β静止坐标系的α轴,使之与旋转高频电压注入法一样稳定,但是存在交叉耦合效应,为了消除这个不利影响,加入低通滤波器滤除交叉耦合效应,得到响应电流,再对响应电流进行解调得到转子位置信息。文献[53]提出一种新型脉振高频信号注入法,向电机转子轴线位置的正、反两个方向分两次同时注入含直流偏置和高频脉振的混合信号,根据两次注入信号和采样电流响应信号计算推导,从而判断磁极的极性,此方法不需采用滤波器即可实现转子从初始位置辨识。
3.1.1 开环控制算法
(3)脉振方波电压注入法
今年复合肥总体价格高于去年同期,而且还高了不少。以45%硫基复合肥为例,较去年同期增长14%,原料尿素同比增长28%,磷酸一铵同比增长14%左右,氯化钾同比增长6.4%,硫酸钾同比增长17.6%。是什么原因导致今年复合肥价格如此之高?其主要原因有以下几个方面:
该方法与以上两种不同是注入电压信号是高频方波信号,注入高频方波电压信号的优点在于不会产生噪音,而且对信号处理方便,位置估计更加准确[54]。湖南大学姜燕、刘思美等人[55]针对传统方波电压注入法的闭环调节环节收敛时间过长,且辨识磁极极性不准确等问题,提出新型高频正交方波电压注入转子初始位置辨识方法,该方法取消了闭环调节环节,缩短了收敛时间,而是采取直接将正交方波信号注入α-β静止坐标轴,利用其高频响应电流辨识转子磁极位置后,再通过向α轴注入低频正弦电流信号辨识磁极极性。
3.3 全速度区域复合控制方法
任何一种无传感器控制方法都有其自身的优点与缺点。有的控制方法在中、高速的永磁同步电机性能表现更为突出,而有的控制方法在零、低速时更精确。因此,有学者提出将两类方法进行排列组合,从而实现永磁同步电机全速度范围的无传感器控制。
文献[56]提出在永磁同步电机的低速阶段采用高频信号注入法,在高速阶段采用滑模观测器法,将两者算法相结合,再通过引入电流递减斜率切换方法,从而实现永磁同步电机全速度范围的无传感器控制。文献[57]针对永磁同步电机在低速阶段存在位置估计延滞,高速阶段模型参数对其影响较大的问题,提出了将模型参考自适应算法与脉振高频电压注入法结合的复合控制算法,再通过利用加权平均算法,实现了二者之间算法的顺利切换,实现了永磁同步电机全速域无传感器复合控制。
在传统文化约定俗成的理解中,将人格的内涵规定为个人的品格和素质,以及个体的价值和尊严、责任的统一。在中国近代教育史上,蔡元培率先使用了“人格”一词,他认为:“在普通教育,务顺应时势,成共和国民健全之人格。”[1]人格概念应该包括两层核心含义:以价值观为核心内容;价值观指导下所形成的特有的思维方式和行为模式。
4 未来趋势与展望
无传感器控制技术的出现,给永磁同步电机高精度伺服控制系统带来了妙音,很大程度上拓宽了永磁同步电机的工作领域。
都市人的身份认同危机,从20世纪90年代开始便进入电影创作者的视野。实际上,电影从其诞生的那一天起,便与都市有着天然的关联;我们甚至可以说,电影本身就是城市现代性的一部分。在中国电影发展史上,早在20世纪三四十年代,上海等地的都市景观便成为摄影机的拍摄对象。然而,只有进入到20世纪90年代以后,中国电影才真正地深入到都市人的精神世界里,而这正是因为当代中国快速展开的都市化进程。拜金主义、无意义感,这些普遍的精神状况也成为中国当代都市电影的文化标签。就此而言,对中国当代都市电影中的身份认同危机展开讨论,不仅有其学术上的价值,也具有关涉时代精神状况的现实意义。
目前,无传感控制技术虽已面世多年,国内外学者也提出过许多新的控制算法,但是使用效果并非十分理想,仍然有很大的发展空间。提出的复合控制算法不能满足高精度的控制,还有改进的空间。
未来发展趋势如下:
(1)随着电力电子技术、电机控制基础理论以及计算机算法的不断更新与进步,未来PMSM无传感器控制算法不会只是单一的控制算法,应该会朝着多种控制算法相结合的方式发展。
(2)未来多种控制算法结合使用,针对电机运行状态的不同,实现自动切换控制算法,真正实现PMSM全速度范围的高精度控制。
(3)随着人工智能的进一步发展优化,未来还可能仅通过人工智能算法这个单一算法就可以实现电机的高性能高精度控制。
5 结 语
本文对近十年国内外电动汽车产业的发展历程与研究现状进行综述,研究对比发现,永磁同步电机因其优秀的综合性能被绝大多数电动汽车采用作为驱动电机。研究分析国内外永磁同步电机无传感器控制技术的发展现状,对各种无传感器控制技术的工作原理、适用场合进行了详细的划分和总结。最后对无传感器控制技术未来发展趋势进行展望。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
湖北工业大学学报(2021年2期)2021-04-28
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子制作(2019年23期)2019-02-23
