
导航卫星平台时间自主标定和校正方法
2022-07-27 11:05石龙龙祁见忠
航天控制 2022年1期
石龙龙 祁见忠 贺 芸
1.中国科学院微小卫星创新研究院,上海 201203;2.上海微小卫星工程中心,上海 201203
0 引言
卫星导航系统基于卫星的时间和位置信息实现精密授时、测距和导航定位服务。新一代北斗导航系统实现了基于星间链路自主定轨与时间同步功能的自主运行能力。长时间自主运行要求导航卫星保持时间系统的高稳定性和高准确度,期间一旦发生时频系统异常,卫星将无法自主获得时间信息,导致服务中断[1]。
提出一种卫星平台时间维持方法,在时频系统故障时,由星载计算机利用平台时间对时频系统进行授时,获得时间基准后,利用星间链路进行卫星时间恢复。但平台时间准确度不高,无法达到时频系统恢复所允许的时间误差范围[1]。
随着卫星导航系统的发展,以原子钟为基础的载荷时统以及自主导航的时间同步研究得到关注。关于导航卫星平台时间的研究集中在压控晶振电压的闭环控制,通过调整压控晶振的电压以达到调整晶振频率的目的。本文提出一种软硬件相结合的平台时间管理方法,以导航任务处理机1PPS(1 Pulse Per Second)信号作为平台时间的校准信号,利用软件对平台时间误差进行自主标定和校准,维持平台时间的高精度,在载荷时统故障时反向授时,保持星上时间系统的稳定性和准确度。相对于传统硬件调整时钟频率的方法,本文采用自主标定和校正的方式,使用简单,不依赖硬件电路,适用范围不限于压控晶振。
1 平台时间维持
1.1 导航卫星时间系统
导航卫星时间系统分为载荷时间和平台时间。卫星时频系统是载荷时间的基准,其以星载原子钟为时间源,载荷设备均以时频系统为时间基准。平台时间系统以星载计算机的实时时钟单元晶振为时间源。导航卫星时间系统示意图如图1所示。

图1 导航卫星时间系统
导航卫星时间系统的建立和维持包括时间源、时间起点、时间间隔以及时间信息等。导航任务处理机自主维持的北斗时为载荷时间起点,时间间隔为1s(1PPS)。载荷时间即卫星时间,是实现导航服务的基础。
一般情况下,载荷与运控系统星地间同步通过发送指令和上注钟差参数实现。平台与测控系统的星地时间同步通过地面测控系统上注实现。获得初始时间后,时频系统产生时间基准,导航任务处理机以此产生1PPS。导航卫星载荷单机均以此为时间基准进行校正。平台以星载计算机实时时钟单元实现自主守时。由于晶振准确度远低于原子钟,可利用1PPS信号对平台时间进行校准。
1.2 平台时间校准设计
星载计算机实时时钟单元采用恒温晶振(OCXO)。晶振的实际震荡频率与标称频率发生偏移(频率漂移)的程度称为准确度。由晶振频率漂移引起的频率误差在采样间隔内的一次积分形成时钟偏置误差。准确度引起的偏差会给测量系统引入累积误差。晶振频率稳定度是指由晶振相位噪声引起的频率随机变化,会给测量系统引入随机误差。星载计算机的恒温晶振如表1所示。

表1 恒温晶振性能指标
星载计算机晶振频率与载荷原子钟系统时标准频率的不严格同步是产生平台时间与载荷时间时钟误差的根本原因。由表1可知恒温晶振频率准确度为5×10-6,频率稳定度达到5×10-8。星载氢原子钟准确度为5×10-12,稳定度为7×10-15量级[2]。导航任务处理机产生的1PPS信号准确度可达8×10-9量级,稳定度为10-11量级。时钟晶振无法直接作为载荷时间的备用时间基准。可以利用载荷时频系统1PPS时间信号对平台时间进行标定,用软件对钟差进行校正,提高星载计算机时间的精度,达到载荷时间系统可用的程度。
载荷时间系统产生1PPS信号,作为时间基准输入到星载计算机,星载计算机利用1PPS信号进行平台时间校准。载荷时间系统故障时,星载计算机利用产生的平台时间1PPS信号输出给载荷系统进行反向授时。平台时间校准设计如图2所示。

图2 平台时间校准设计图
晶振频率信号经时钟芯片输出10MHz时钟信号。导航任务处理机1PPS信号输出到星载计算机。该1PPS信号有2个作用:1)星载计算机利用该1PPS信号实时校正平台时钟,以作为实时平台时钟信号;2)以1PPS信号为时间基准,利用星载计算机内设置的FPGA计数器,统计一段时间内的时钟芯片输出的10MHz脉冲上升沿个数,统计晶振时钟的误差,用于计算生成平台1PPS信号的参数。载荷1PPS信号实时校正平台时钟示意图如图3所示:

图3 1PPS信号校正平台时钟示意图
导航任务处理机1PPS信号采用RS-422差分电平,周期为1s,正脉冲形式,脉冲宽度大于20μs。利用授时指令等操作使平台时间与卫星时间在整数秒级一致。开启PPS校时指令后,星载计算机时钟信号每秒与1PPS信号上升沿对齐,误差部分(Δt)舍弃。实际上,1PPS校正的是平台10MHz时钟的脉冲个数。例如,某个1PPS时间内对应的10MHz脉冲数是9999900,那么剩余的100个直接舍弃,重新开始计时。
1.3 平台时间自主标定和校正
10MHz时钟最小时间间隔为100ns,每进行一次计数操作,引入的系统误差范围为-100~100ns,而且不可控。由于FPGA硬件接口限制,星载计算机只能进行微秒级的校时动作,星载计算机每一次动作都要消耗时间,引入了随机误差。如果利用载荷1PPS每秒校正平台时钟得到钟差Δt,用Δt作为参数生成下一秒的平台1PPS信号,则无法消除或者减小上述误差。通过选取一段较长时间统计载荷时间与平台时间的钟差的方法,可以把由时钟最小间隔带来的误差平摊到更长时间,也可以减小由计算机校时操作引起的外部随机误差。导航任务处理机的1PPS信号相对于绝对时间的误差服从正态分布,选择一段时间内的1PPS信号作为基准亦可减小随机误差。综合考虑FPGA的资源开销、随时间增长而减小误差的边际递减效应,以及晶振温度稳定度和老化率等因素,选取127s作为统计时长。
1.3.1 钟差的统计
星载计算机以载荷1PPS信号为时间基准,统计127s时间内平台时钟的误差,作为校正参数生成高精度的平台1PPS信号,在卫星时频系统故障时对其进行反向授时,维持卫星时间的稳定和准确度。具体操作方法是FPGA计数器以1PPS校时信号为基准,统计127个1PPS时间单元内10MHz时钟晶振脉冲的个数,并将此结果输出给处理器,作为软件计算自主校时的参数。在处理器模块接口中增加4个寄存器,分别为计数使能寄存器、赋初值寄存器、计数寄存器、统计次数寄存器。计数功能流程图如图4所示。

图4 FPGA计数器计数功能流程图
如果1PPS校时信号为正脉冲,向配置寄存器写‘0’,将内部信号初值配置为低电平;如果1PPS校时信号为负脉冲,则向配置寄存器写‘1’,将内部信号初值配置为低电平。如果要停止统计脉冲个数,则只需向控制寄存器中写‘0’,即可停止计数,并将所有计数器清零。
1.3.2 钟差的校正
平台时钟的准确度可以保证其与1PPS时钟信号的误差值始终在同方向,则统计的总钟差不会相互抵消,可以真实反映误差情况。统计T1s至T127s共127s的平台时间总误差Δt总。实际操作中是以统计的10MHz平台时钟脉冲数与标称频率的误差计算钟差。误差值包括了频率准确度误差、稳定度误差、计数引起的系统误差。其中稳定度误差基本呈现正态分布,统计较长一段时间可以有效减小随机误差。
开启自主校时指令后,按照上述方式每127s统计一次误差值。把最近一次采集的误差值存储。当卫星时频系统故障时,星载计算机连续3s采集不到导航任务处理机1PPS信号即把平台1PPS信号输出给导航任务处理机。
输出给载荷的平台1PPS需经过误差校正,需要注意3点:1)误差不能丢弃,需要完整的校正到输出的1PPS中;2)由于FPGA硬件接口限制,星载计算机只能进行微秒级别的校正,故需要对每次校正的时间误差参数进行调整;3)计算机每次进行校时动作需要消耗200ns时间,故每次校时需要将该时间开销计入时钟误差内。具体的校正策略为:把最新的总时间误差尽量完整的分摊到需要校正的127个平台1PPS上,剩余的误差累积到下一个127s总误差中;每秒需要校正的时间参数为实际误差最靠近的微秒级整数。详细的校正步骤如下:
1)以载荷1PPS信号为时间基准,统计每127个1PPS信号时间内平台10MHz时钟晶振脉冲个数,依此计算平台时间与载荷时间的总误差Δt总;
2)需要校正时,星载计算机利用存储的最新误差值Δt总计算平台127个1PPS每秒需要校正的时间参数;
3)计算第1s应调整的误差值Δt1=(1×Δt总)/127,则取实际调整的参数Δt"1=[Δt1+0.2]μs,即取[Δt1+0.2]的整数部分,其中0.2 us为计算机操作需要消耗的时间。当Δt"1为0时即不调整。前2s应调整的总误差值Δt2=(2×Δt总)/127,则取实际调整的参数Δt"2=[Δt2-Δt"1+0.2]μs,即前2s总的应调整的总误差值Δt2减去第1s已经调整的Δt"1,再加上计算机操作时间0.2 us,取其整数部分即为第2s需要校正的误差值;
4)前ns应调整的总误差值Δtn=(n×Δt总)/127Z,则第ns实际调整的参数Δt"n=[Δtn-Δt"n-1+0.2]μs,即前ns总的应调整的误差值Δtn减去前(n-1)s已经调整的Δt"n-1,再加上计算机操作时间0.2 μs,取其整数部分即为第ns需要校正的误差值;
5)按照步骤4的方法逐秒调整平台1PPS至第127个,若还有剩余的的时间误差(Δt总-Δt"127)未调整,则累积到下一个127s 1PPS总误差中继续调整。
上述步骤中每次都要计算前n秒应调整的总误差值Δtn=(n×Δt总)/127,并且不使用平均值计算的目的是为了计算中不丢失误差值,即可以把误差完整的调整到校时参数中,剩余误差累积到下一个周期中同样是为了不丢失误差。平台时间自主标定和校正流程如下图所示:

图5 平台时间自主校正流程图
2 试验结果
地面试验使用氢原子钟作为时间频率基准源,使用其输出1PPS,其精度可达8×10-9量级,与导航任务处理机一致。与星载计算机10MHz时钟晶振信号进行比对,统计一段时间后两者产生的偏差,能够计算出星载计算机每秒钟的时钟误差值。在星载计算机开启自主校时后再次进行比对试验,统计一段时间的时钟误差值,计算每秒的时钟误差值。
试验分别在低温(-25℃)、高温(60℃)、常温(25℃)条件下进行。利用频率计(SR620)记录星载计算机晶振时钟与原子钟的钟差,一段时间后再次记录结束时的钟差,计算出每秒平均钟差。未进行自主标定和纠正的试验数据如表2所示:
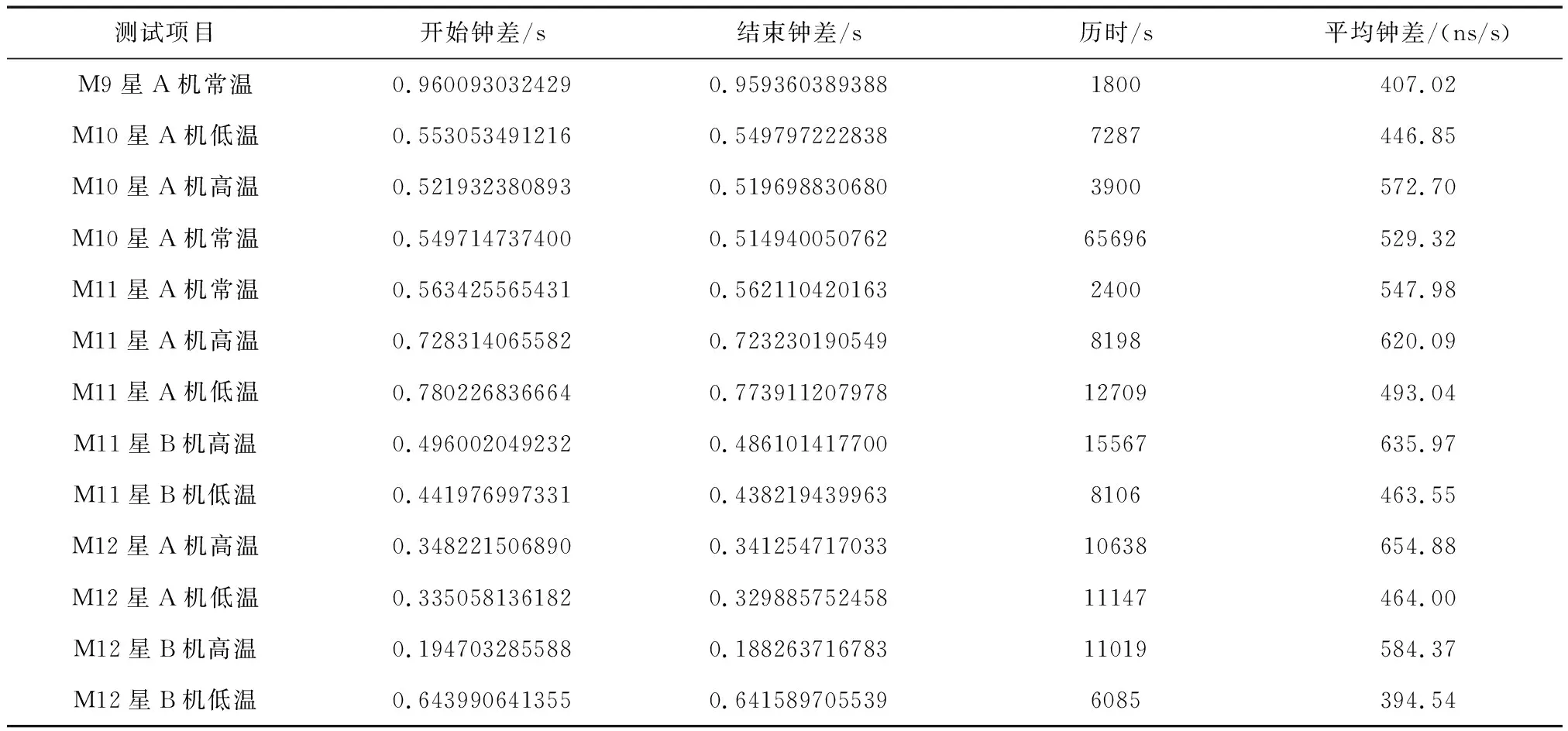
表2 未标定和纠正的平台时间误差
由上表可以看出,未进行时钟校正平台时间误差的钟差在395~655ns/s。标定和校正后的试验数据如下表所示:

表3 标定和纠正后的平台时间误差
经过自主标定和校正后的时钟钟差范围在0.397~0.604ns/s,由于导航任务处理机的1PPS准确度在10-9量级,可知平台时间相比未校正前提高了约3个数量级,满足30min误差小于3μs的指标要求。由校正原理可知,该方法主要是校正了平台时钟的准确度误差,也是主要误差。稳定度误差是随机波动引起的误差,增加统计时间可把误差分散到更长的基数上以减少单位时间内误差。技术系统误差主要是硬件设计精度和软件操作误差,可在误差统计中剔除,其对校正结果影响很小。
3 结论
研究了提高导航卫星平台时间的技术,针对导航卫星平台时间精度较低的情况,提出了一种平台时间维持方法。在卫星时间正常时利用载荷时间校正平台时间;在卫星时间故障时,利用校正后的平台时间维持卫星时间的稳定。经试验验证,采用该自主校时方法校正的平台时间精度提高了3个数量级,验证了增加统计时间、合理分摊误差值以提高时钟精度的正确性。与传统的利用钟差调整压控晶振电压以调节时钟频率的方法不同,本文采用软硬件相结合的方法直接对时钟误差进行调整校正,为导航卫星平台时间校正方法提供了经验。该平台时钟校正方法已经应用于北斗三号工程8颗MEO卫星,经过地面试验及在轨试验验证,该方法有效可行,有力保障了卫星时间的稳定性。后续可以调整钟差统计时间,以找到误差校正与资源开销更好的平衡。
猜你喜欢
人民长江(2021年9期)2021-10-18
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
科学与技术(2018年5期)2018-11-15
数学大王·低年级(2018年9期)2018-10-24
大众摄影(2018年6期)2018-06-19
佛山陶瓷(2017年8期)2017-09-06
数学大王·中高年级(2017年2期)2017-02-08
科技与创新(2016年17期)2016-11-04
学苑创造·A版(2016年4期)2016-04-16
