
生物融合式腰椎牵引外骨骼机构的设计与仿真*
2022-07-25 07:20王晴晴杨建涛贺晨喻洪流石萍
生物医学工程研究 2022年2期
王晴晴,杨建涛,贺晨,喻洪流, 2,石萍, 2△
(1.上海理工大学康复工程与技术研究所,上海 200093;2.上海康复器械工程技术研究中心,上海 200093)
引言
关节负荷异常、创伤、过度的举升都会增加脊柱负担,造成腰椎肩盘突出、胸腰椎后关节紊乱等脊柱退行性疾病[1-3]。脊柱退行性疾病也称为骨关节炎,近年来呈现出年轻化的趋势。在40岁以下的人群中,40%以上有各种脊柱疾病[2]。脊柱退行性疾病除了及时采用药物和手术治疗外,还可以使用物理疗法[4-5]。临床上常使用牵引疗法,通过释放相邻椎体间的张力缓解腰椎病造成的疼痛,运动受限等问题,具有良好的效果[6-8]。最初的牵引治疗主要是由中医的推拿手法体现,推拿治疗能够将受到影响的软组织进行位置纠正,对脊柱的关节结构进行矫正,消除炎症反应和关节疼痛[9-11]。
随着运动康复理论及机器人技术的发展,出现了多种颈、腰椎牵引设备。市场上现有的牵引设备主要有助邦、永辉、康瑞、曲度邦等品牌,其设备运行平稳可控,不仅可以保证牵引力的强度和效率,而且能够在牵引过程中对牵引数据进行实时的记录,用于治疗效果的评估和修正,改进传统的牵引治疗手段,提高牵引的效果和效率[12]。虽然这些设备在一定程度上提高了牵引治疗的效率和效果,但牵引方式单一、尺寸大、顺应性差;牵引完全由机械决定人体,不能从机构层面影响牵引运动,安全性差;且由于不具有康复自由度,很难结合患者需要做出适当的牵引治疗[7, 13-15]。针对上述问题,本研究提出一种生物融合式腰椎牵引外骨骼,由机械机构和人体腰椎共同组成,将机械设计与人的运动相结合,不仅可以实现腰椎的纵向牵引治疗,而且能够根据人体需要从机构层面做出相应的调整,使其具有较高的安全性和较广泛的适应性。
1 穿戴式腰椎外骨骼设计方案
1.1 穿戴式外骨骼设备尺寸参考
腰椎主要在矢状面、冠状面和水平面三个面内进行运动。正常运动时,腰部关节具有屈曲、左右侧屈和旋转三个转动自由度。为了实现腰椎外骨骼对人体运动的纠正,本研究设计了一款6自由度腰椎牵引外骨骼[13]。从人机工程学角度分析,人体尺寸与产品设备之间的比例与身高有关,产品设计对象一般成比例关系。据国标《GB10000-88中国成年人人体尺寸》以及腰椎的椎体高度(前中后的平均值),设计外骨骼机器人结构调节范围适用于一般女性和男性,见表1[16-18]。
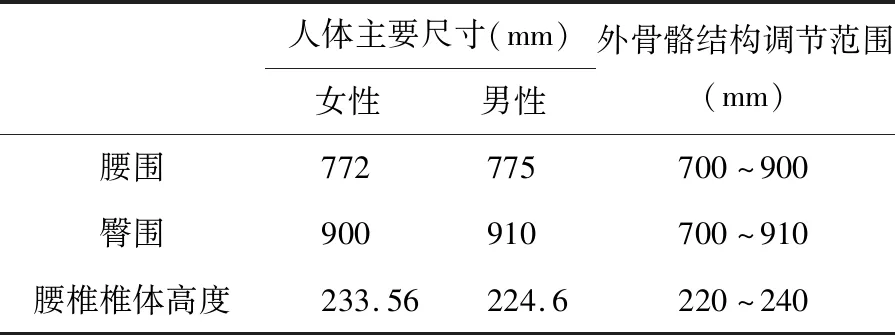
表1 外骨骼结构尺寸参数Table 1 Exoskeleton structure size parameters
穿戴式腰部外骨骼活动范围主要参考人体腰部运动范围,其角度范围见表2。参考正常人体腰部能够实现的各种动作,包括前屈后伸、左右侧屈和旋转动作(见图1),定义本研究所提出的生物融合式腰椎牵引外骨骼的功能。
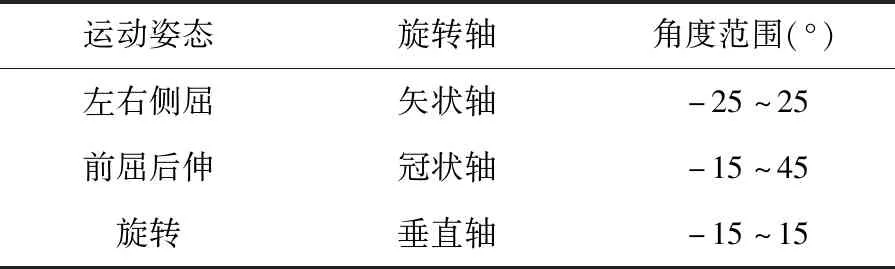
表2 人体腰部各种运动方式下的运动范围Table 2 The motions range of the human waist in various motion modes
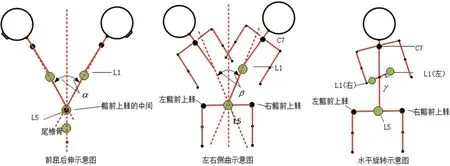
图1 腰椎运动方式示意图Fig.1 Schematic diagram of lumbar spine movement
1.2 生物融合式外骨骼机器人总体设计
腰椎牵引外骨骼,主要由刚柔耦合模块、牵引模块组成,见图2。牵引模块由四条SPS支链组成,起到固定推杆电机位置,以及合理分配自由度的作用。S表示球副,P表示移动副。刚柔耦合模块由尼龙复膜的刚性部分和柔性的连接带组成。连接带缠绕方式和背面束缚方式,起到增大牵引的接触面积和缓解腰部压的作用。
图2 穿戴式腰椎外骨骼机械结构三维图Fig.2 3D drawing of the mechanical structure of wearable lumbar vertebrae exoskeleton
1.3 生物融合式腰椎外骨骼数学模型建立
在腰椎牵引过程中,主要考虑腰椎运动角度和移动两个因素,若将每个关节均简化为球副,会出现局部自由度[12]。为保证人体运动的稳定性,机构简化时,腰椎关节简化为S和P,见图3。
2 运动学分析
为验证本研究腰椎穿戴外骨骼是否符合人体运动范围,本研究借助人体腰椎与机械结构的相互位置关系,计算出位姿矩阵,作为分析工作空间的依据。通过改变旋转变量和移动变量,查看投影面积的变化,证明腰椎外骨骼的机械设计不干涉人体的正常运动。
2.1 机构逆运动学分析
为描述动平台相对定平台的运动,根据整机机构简图,见图3。将坐标系C-XYZ固连在主体C上,坐标系A-X1Y1Z1固连在主体A上。在位移方面,用图解法表示封闭矢量,每个运动封闭环可以通过向量形式表示,见式(1):

图3 4-SPS & 1-SP并联机构数学模型图Fig.3 Mathematical model diagram of 4-SPS & 1-SP parallel mechanism
(1)

Li=CP+CRAAai-ci(i=1,2,3,4)
(2)
运动平台中心点A的位置定义为CP,见式(3):
CP=[px,py,pz]T
(3)
使用固定坐标系表达法,运动平台中心点的旋转矩阵表示为CRA,见式(4):
CRA=RZ(γ)RY(β)RX(α)=
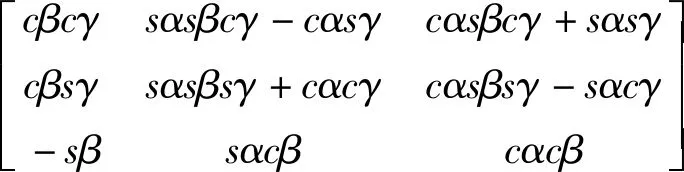
(4)
式中c为cos的简写形式,s为sin的简写形式,本研究采用固定X-Y-Z欧拉角,其中α,β和γ分别为绕X轴,Y轴和Z轴的旋转角度。根据旋转矩阵CRA,可得到4×4齐次矩阵CTA,见式(5):
(5)
2.2 腰椎正运动学分析
将人体的腰椎简化为一只被动杆,通过改变三个关节变量η1,η2,η3和三个移动量Δx,Δy,Δz,可实现开环链的空间运动。运用D-H坐标可以写成CTA,见式(6):
CTA=CT1(η1)1T2(η2)2T3(η3)zTA
(6)
利用D-H坐标法,根据被动杆坐标系来计算D-H变换矩阵,见图4。

图4 腰椎(被动杆)的坐标系及运动轨迹Fig.4 The coordinate system and motion trajectory of the lumbar spine (passive trajectory)
由表3所示D-H参数得到对应的姿态矩阵CTA,见式(7):
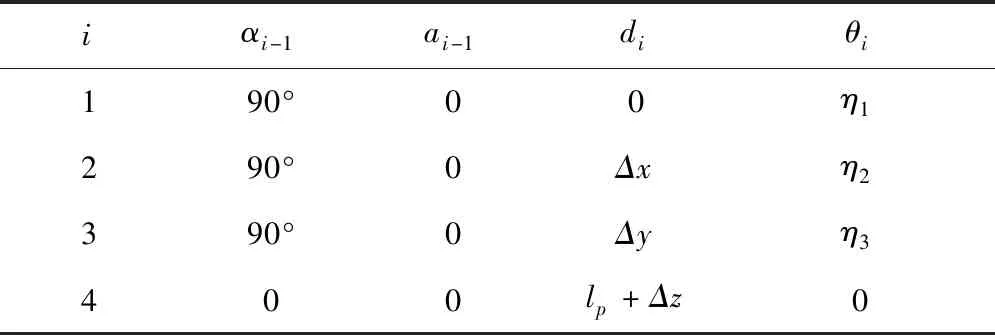
表3 D-H参数表Fig 3 D-H parameter table
A=Δycη1sη2+Δxsη1+(lp+Δz)cη1sη2
B=(lp+Δz)cη2+Δycη2
C=(lp+Δz)sη1sη2+Δysη1sη2-Δxcη1
D=(lp+Δz)sη1sη2+Δysη1sη2-Δxcη1
E=-sη1cη2sη3-cη1cη2
(7)
因为腰椎运动过程中,x与y方向不发生运动,即Δx为0,Δy为0,则对应的CP见式(8):
(8)
根据人机系统的运用,CP坐标系转换见式(9):
(9)
根据国家人体尺寸标准、人体骨骼构造和推杆长度范围,各个参数值的设定见表4。

表4 腰椎牵引外骨骼参数表Table 4 Parameters of lumbar traction exoskeleton
各个端点对应的坐标见表5。
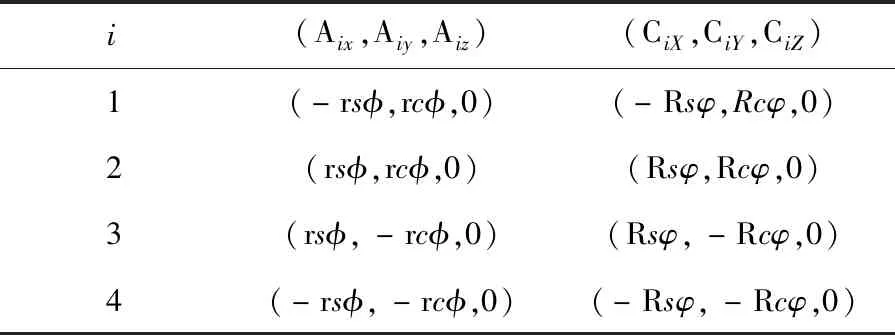
表5 动平台与定平台坐标值Table 5 Coordinate values of moving platform and fixed platform
2.3 约束条件确定
并联机器人的工作空间主要受到杆长范围、运动副的转角范围(穿戴过程中未发现机构干涉,即不考虑)的影响。其约束条件主要有:
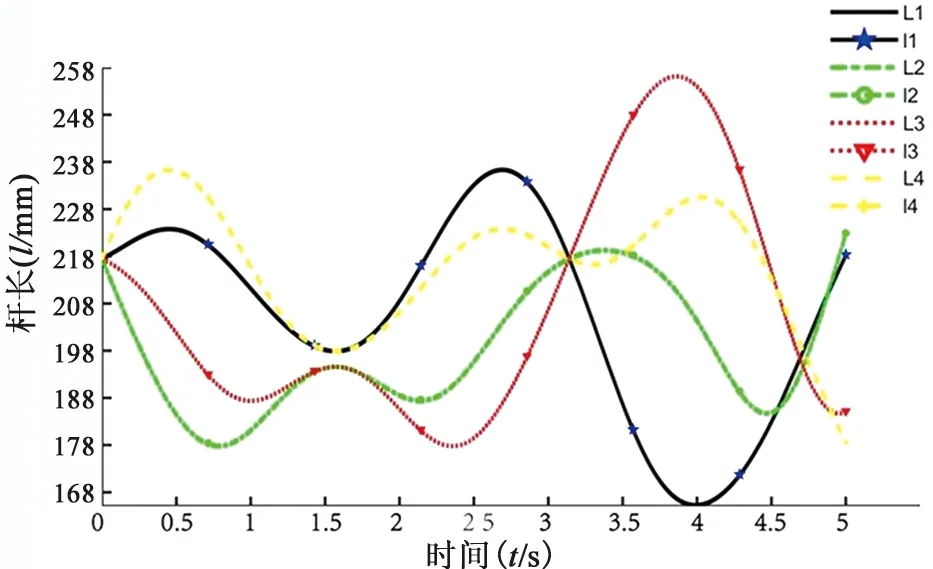
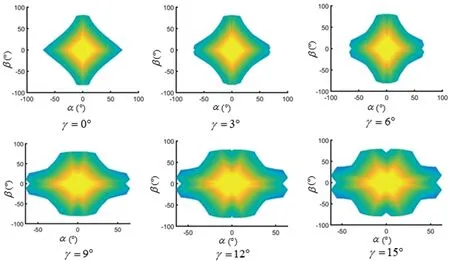
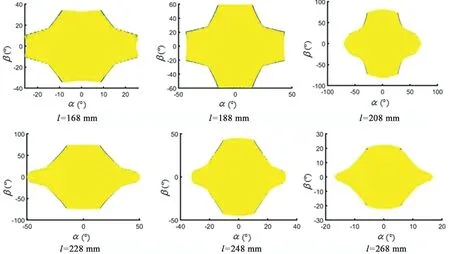
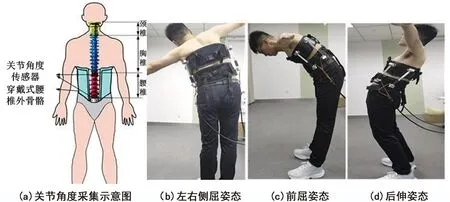
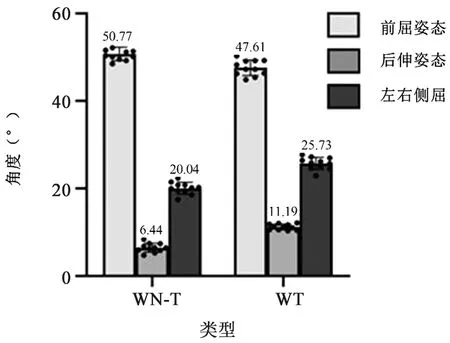
(1)杆长约束 并联机构的动平台相对静平台的运动由杆件长li的范围决定,杆长的范围为lmin (2)球铰副约束 机构设计为8个球铰副连接,其转角ηAi见式(10): (10) (3)杆件之间约束 当单独讨论机构时,因为连接上下平台的连杆具有一定的尺寸大小,各杆件之间有可能发生干涉。但由于通过中间支链的约束,穿戴过程中不会发生连杆与连杆的干涉。 根据所得到的姿态矩阵,见式(9),将动平台中心点的运动曲线设置见式(11): (11) 所得驱动位移曲线见图5,其中lp设置为初始值Z,初始旋转角度设置为0。 图5 姿态变化曲线拟合图Fig.5 Fitting diagram of posture change curve 由图5姿态变化曲线拟合图分析可知,ADAMS的仿真曲线(l1,l2,l3和l4)与数学模型曲线(L1,L2,L3和L4)拟合几乎重合,验证了数学模型的建立是合理的。通过对拟合曲线的观察可知,四个推杆的运动杆长上限未超过258 mm,下限在168 mm。 由于在日常生活中,人体腰部在水平面内的运动更为频繁,因此,本节主要研究不同参数对人体腰部在水平面内运动范围的影响[15-16]。设定的结构参数见表3,驱动杆初始杆长为168 mm,最长均为268 mm。利用MATLAB编写相关程序,代入相关数据,获得机构的姿态工作空间见图6。 图6 工作空间三维图Fig.6 Three-dimensional view of working space 研究绕Z轴旋转对工作空间的变化时,将杆长范围设定在固定范围内,即lmin 图7 不同γ对垂直投影面积的影响Fig.7 Different γ value influences on vertical projected area 由图7可知,当动平台相对定平台γ角度发生变化时,α、β的运动范围无变化,但垂直投影面积在增大,整体的运动空间变大。说明随着绕Z轴旋转角度的增大,人体腰椎在水平面内的活动范围增大。当-15°<γ<15°,可知-80°<β<80°,-80°<α<80°,分别接近人类空间运动极限范围,确保人穿戴此腰椎牵引外骨骼,正常运动不受影响。 其次,杆长的伸缩长度l是并联机构的另一个重要参数,对工作空间的大小和形状有直接的影响。本并联机构平台共有四个变量。在研究杆长对垂直投影面积的影响过程中,设定γ为一个定值,观察不同的杆长对垂直投影面积的影响,见图8。 图8 不同杆长对垂直投影面积的影响Fig.8 The influence of different limbs'lengths on vertical projected area 由图8可知,垂直投影面积随着杆长范围的增大而缩小,说明人体腰部运动范围随着杆长伸长量的增加而减小。但α>45°,β>25°,并不影响患者穿戴后的正常运动。 根据数学模型所得到的数据以及仿真所验证工作空间的合理性,本研究采用NORAXON公司生产的NORAXON-DTS无线采集系统进行人体三维运动检测数据采集,分别采集受试者在穿戴不牵引(WN-T)和穿戴牵引(WT)两种情况下在左右侧屈姿态、前屈姿态和后伸姿态下的三维平面角度,见图9。角度数据的采集来自11名健康大学生(6名男生,5名女生,年龄(25.2±1.5)岁,身高(175.1±2.3)cm,体重(65.2±1.8)kg),无脊柱退行性疾病、腰部疼痛等症状。受试者在数据采集前均已了解实验步骤,掌握实验的基本流程和注意事项,且此次实验获得上海理工大学康复工程与技术研究所伦理审查委员会的批准。实验前,待测部位第五腰椎和骶骨关节部位均需要用酒精擦拭干净,粘贴姿态角度传感器。实验环境应避免电磁干扰,受试者需要保持轻松,完成相应动作。受试者需要每种姿态做三次,每次之间停歇3 s。一个动作执行完成后,身体处于放松状态。 图9 角度采集Fig.9 Angle acquisition 不同状态下,人体腰椎的每种姿态下的运动角度以平均值的方式显示,见式(12): (12) 式中,dm为所有样本量的最大值的平均值,Dmax表示每位受试者运动角度的最大值,N表示受试者的个数(j=1…N)。实验结果表明,在WN-T的情况下,三种姿态下的运动角度(dm)分别为50.7°、6.5°和20.1°。在WT情况下,三种运动姿态下的运动角度(dm)分别为47.6°、11.2°和25.7°,见图10。在这三种状态下,WT情况下的角度均符合表2的设定角度,验证了本研究所设计结构的合理性。但WN-T与WT相比,后伸运动角度和侧屈运动角度较小,说明在WN-T的情况下,穿戴者的运动范围相对小一些。 图10 不同姿态下的腰椎运动角度Fig.10 Lumbar motion angle under different postures 针对脊椎退行性疾病,本研究设计了一款生物融合式腰椎牵引外骨骼。有别于Spallek等[19-24]使用逆运动学方法分析并联机构的可行性,本研究提出了将机构的逆运动学与人体运动的正运动学相结合的数学模型。通过数学模型分析得到,在保证穿戴者安全的条件下,腰部在水平面内的运动范围随着推杆伸长量的增大而减小;随着垂直轴转动范围的增大而增大。运动捕捉实验表明,该腰椎牵引外骨骼能够在安全范围内实现对患者左右侧屈、前屈后伸;能通过及时调整自身结构以及灵活的穿戴方式,满足不同穿戴者的需要。本研究的局限在于着重考虑并联结构在刚性条件下的运动范围,而实际情况中,需要考虑柔性材料在运动过程中的变形条件,该问题值得后续深入研究。3 仿真与验证
3.1 模型合理性仿真与验证
3.2 运动范围合理性仿真验证

4 实例分析
4.1 数据获取
4.2 实验结果
5 结论
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08Chinese Physics B(2022年5期)2022-05-16宝钢技术(2022年1期)2022-03-14
——人-时间资料率比分析与SAS实现四川精神卫生(2021年4期)2021-09-10小哥白尼(野生动物)(2021年12期)2021-03-29黑龙江交通科技(2020年5期)2020-01-13轻兵器(2019年5期)2019-06-21中老年健康(2016年11期)2017-02-05大众健康(2016年3期)2016-05-31恋爱婚姻家庭·养生版(2016年5期)2016-05-06
