
用于新冠肺炎治疗的智能肺泡灌洗系统的设计与实验研究*
2022-07-25 09:50周琪赵忠源赵展宋成利王伟
生物医学工程研究 2022年2期
周琪,赵忠源,赵展,宋成利△,王伟
(1.上海理工大学健康科学与工程学院,上海 200093;2.海军特色医学中心,上海 200433)
引言
目前尽管新冠肺炎疫情形势得到初步控制,但通过对新冠肺炎病例相关文献查询、结合世界范围内疫情动态情况,并根据该病毒的病原学、流行病学等[1-2]特点可以发现,其呈现出大流行病的特征[3],将会反复出现,因此,新冠肺炎需要进行长期防治工作。
根据临床医学解剖以及病理学分析显示,新冠病毒主要攻击肺部,累积部位为下呼吸道[4],且新冠肺炎患者肺泡内会产生粘稠的胶冻状粘液,肺泡间质的大量细胞浸润和间质纤维化也使得肺泡壁的正常气体O2、CO2交换功能受到理性化屏蔽和失能[5-6],直接导致细胞组织器官坏死,增加病患死亡概率。现阶段针对新冠肺炎患者的诊断的样本来源有鼻咽拭子、痰液、血液、粪便以及支气管肺泡灌洗液等[7-9],但常因错误的诊断方式导致诊断结果为假阴性或假阳性,耽误最佳的诊疗时间[10]。
通过不同类型临床标本中新冠病毒的检测研究显示,支气管肺泡灌洗液在所有临床标本中的阳性检测率最高,相比于现阶段常用的鼻咽拭子具有更准确的检测精度[11-12],对新冠肺炎诊断有更高的准确性;此外,肺泡灌洗操作还可以清除肺泡内物质、改善呼吸功能、缓解肺炎症状,从而达到治疗肺炎的作用[13-16]。
基于上述原因,纤维支气管镜肺泡灌洗在新冠肺炎诊治中具有重要意义。但是传统的纤维支气管镜肺泡灌洗不仅操作复杂,且不能精准控制操作过程中出现的系列参数,给医护人员带来诸多不便,甚至影响治疗效果,降低手术操作成功率。为此,本研究设计了一种结合纤维支气管镜肺泡灌洗的智能化灌洗系统,以降低医护人员因缺乏实操经验造成不良影响的概率,达到精确控制灌洗操作的目的,为之后的纤维支气管镜肺泡灌洗诊治新冠肺炎的相关设备提供研发基础,为新冠肺炎的诊治提供更优方案。
1 材料与方法
本研究研发了一种用于新冠肺炎的治疗的智能肺泡灌洗系统,旨在开展关于智能肺泡灌洗系统的前期实验。实验材料主要选取与临床操作一致的室温生理盐水,配合支气管镜配套设备使用,设置固定的灌洗时间,通过改变蠕动泵的转速来控制灌注生理盐水的体积流量,监测在不同流速下灌注时的压力,模拟肺泡灌洗的操作实验。探究灌洗过程中速度、流量以及不同灌洗速度下压力的变化情况,验证肺泡灌洗系统的功能。
1.1 实验系统平台搭建
本研究的肺部模拟灌洗系统包括:肺支气管模型联合纤维支气管镜,配合自制的智能控制装置以及实验室现有的医用台车和监视器等共同组成实验平台,模拟完成整个肺泡灌洗的全部操作过程。肺部模拟灌洗系统示意图见图1(a),支气管镜配套设备以及肺支气管模型实物图见图1(b)。

图1 (a).肺部模拟灌洗系统示意图;(b).支气管镜配套设备及肺支气管模型实物图Fig.1 (a).Schematic diagram of pulmonary simulation lavage system;(b).Bronchoscopy equipment and bronchial model of the physical picture
将肺支气管模型放置在医用台车上,医用台车连接好电源后方可开启监视器,使用纤维支气管镜配套设备(包括支气管镜、光源摄像一体机),将支气管镜插入肺支气管模型内,可在监视器上显示出肺支气管模型内部情况,进而进行肺泡灌洗操作,对肺支气管模型内部情况进行观察。
另外,其他的具体实施情况为将蠕动泵的两端连接橡胶管,其中橡胶管的一端连接储液瓶,另一端连接三通管,三通管上方连接压力变送器,压力变送器通过主控MCU进行控制;三通管左右两端连接橡胶管,其中一端与支气管镜的注水口相连,支气管镜的出水口连接橡胶管至灌洗液回收瓶,灌洗液回收瓶连接负压吸引器来实现灌洗液的回收。整体的智能灌洗实验平台工作示意图见图2。

图2 智能灌洗实验平台工作示意图Fig.2 Schematic diagram of intelligent irrigation experimental platform
结合现有的临床资料和理论基础,根据中华医学会呼吸病学分会在2017年发表的关于肺泡灌洗的中国专家共识[15],按照肺泡灌洗的操作标准和临床参数,结合现有的实验基础,要求肺泡灌洗操作需要经纤维支气管镜注入孔道快速注入室温灭菌生理盐水,每次注入20~50 mL,分3~4次注入,注入总量达到60~120 mL;且在每次注入生理盐水后,要立即快速使用负压吸引相关设备进行吸引操作,负压的范围是在80~100 mmHg(6.7~13.3 kPa),最后要求总的灌洗液回收率≥30%即为合格。
根据上述的一些参数可知,要求在灌注生理盐水时,速度应较快,每次注入的时间约为5~6 s,进而可以得出注入的速度应达到180~600 mL/min,因此,本研究将根据注入速度来确定蠕动泵的选型[17-20];此外,在进行灌洗操作过程中,对灌注时的压力同样也有一定要求。灌注压力过大将会导致肺组织表面渗出灌洗液,引发其他病变等[21],要保证灌注时其产生的压力在一定范围内,避免过大的情况,为此,本研究采用精度较高的压力变送器去采集数据,监测压力值。
1.2 智能控制装置设计
智能控制装置主要由主控MCU、供电电源模块、电机驱动模块、调速信号放大模块、电流监测模块以及启停和方向控制模块组成。智能控制装置的电路结构图见图3。

图3 智能控制装置电路结构图Fig.3 Circuit structure diagram of intelligent control device
其中,蠕动泵(型号为S300-2B+JZ15A,迪睿电子科技)主要由滚轮、软管、泵头和步进电机构成。泵头型号为JZ15A,拥有两滚轮,管路设计中采用的软管内径×外径为(6.4×9.6) mm,步进电机采用的是2相4线步进电机。步进电机工作带动滚轮,滚轮挤压软管,完成灌注液体动作。电机的部分参数见表1。
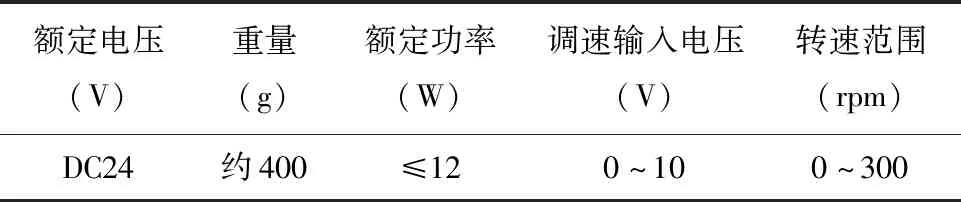
表1 步进电机参数表Table 1 Parameters of stepper motor
由表1可知,本研究所选的蠕动泵最高转速为300 rpm,调速输入电压为0~10 V,每个电压都对应着相应的蠕动泵转速。根据转速需求,设所需蠕动泵的已知转速为a,该转速对应的未知电压为U。则转速a与所需电压U之间的关系如下:
(1)
主控MCU选择以STM32F103RCT6为核心进行设计,对整个电路进行控制;供电电源模块选择LM7812L、LM7805T和LM1117-3.3T芯片,对DC24V转12 V再转3.3 V进行降压,从而实现对单片机的供电;电机驱动模块采用的是高微步两相式双极性步进电机驱动芯片TB5128FTG(东芝公司),细分数为128,在降低功耗的同时可实现高精度控制;调速信号放大模块采用的是LM2904ST芯片(ST公司),此模块主要完成对3.3 V输入电压放大至0~10 V范围内进行工作,实现对蠕动泵转速的控制[22-23];电流监测模块采用的INA240A1PWR芯片(德州仪器),可以对压力变送器输出的信息进行采集,通过计算转换成压力值[24],从而监测灌洗过程中的压力值;启停和方向控制模块主要利用MOS管对继电器的控制,以实现启停和转动方向的控制。其中,电流监测模块的作用至关重要。
1.2.1电流监测模块设计 电流监测模块需要配合压力变送器,对肺泡灌洗模拟实验操作中压力值进行采集。本研究所用的二线制压力变送器(型号为WMB2012-HS,烨立工控)。该压力变送器部分参数见表2。

表2 压力变送器参数表Table 2 Parameters of pressure transmitter
由压力变送器参数表可知,该型号的压力变送器测量出的压力值是通过对应的输出电流来换算实现的,那么根据压力变送器的量程范围以及对应的输出电流范围,设被求压力的已知实际输出电流值为i,被求电流点对应的未知压力值为P。则压力P与电流i之间的关系如下:
P=35×(i-4)/16
(2)
在电路方面,采用INA240A1PWR芯片进行设计,该芯片是一款电压输出、电流检测放大器,其最大的特性是具有增强型 PWM 抑制功能。该功能可精确测量电流,避免输出电压产生较大的瞬变及相应的恢复纹波。可用的固定增益为20 V/V,供电电压为2.7~5.5 V,电路设计简单,且完全可以满足系统需求。
2 结果与分析
实验材料主要选取室温生理盐水进行实验操作。设定实验的组数共5组,每组实验分别设置蠕动泵的速度为40、80、120、160和200 r/min,固定灌注时间为20 s,准备两个量杯,一个量杯内放入足量生理盐水,另一个量杯记录经过灌注后生理盐水的体积,每组实验重复三次,取平均值后作为该转速下对应的流量[25]。
通过式(1)对蠕动泵在不同转速下对应的调速输入电压进行换算,并做出如下参数设置,得出不同转速下应进行的电压值设置,详见表3。

表3 调速输入电压参数表Table 3 Parameters of adjustable speed input voltage
将得到的每组实验中蠕动泵转速和与之对应的流量数据记录下来,利用数据处理软件进行数据分析,绘制出两者关系的散点图并进行线性拟合[22,25],得出蠕动泵转速和该转速下对应的流量关系,实验结果分析见图4。

图4 蠕动泵转速与流量关系拟合曲线图Fig.4 Fitting curve of relation between speed and flow of peristaltic pump
由蠕动泵转速与流量关系拟合曲线图可知,转速与流量之间的关系如下:
y=1.6945x
(3)
式中,y是蠕动泵转速;x为蠕动泵流量;决定系数R2=0.9897。
同时,记录5组实验在不同转速下灌注液体时的压力值,以便对速度与压力值进行分析。首先记录每组实验的输出电流,通过式(2)换算成压力值,并取平均值作为该转速下的压力取值。每组实验的转速与压力值的关系见图5。

图5 蠕动泵转速与灌注时压力值关系图Fig.5 Relationship between peristaltic pump speed and pressure value during infusion
由图5可知,对实验数据进行线性回归分析得到拟合曲线。y是灌注时压力值;x为蠕动泵转速;决定系数R2=0.9085。转速与灌注时压力值的拟合曲线关系如下:
y=0.0969x+7.852
(4)

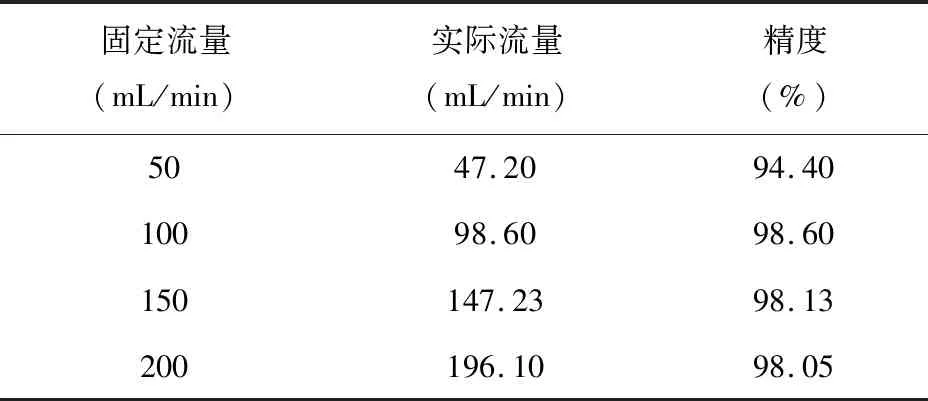
表4 智能控制装置精度表Table 4 Precision table of intelligent control device
(5)
取4组实验中对应的精度的最低值作为智能控制装置流量精度值。再结合图4的拟合关系,智能控制装置流量精度为94.40%。
3 讨论
本研究利用自制的智能控制装置加入到肺泡灌洗操作中,以简化灌洗操作的复杂性,提高灌洗操作的智能性。根据蠕动泵转速与流量的关系实验可知,智能控制装置在不同的调速输入电压下进行输入时,随着转速的提高,流量也随之增加,且由线性回归分析结果显示,决定系数R2为0.9897,充分反映流量和速度是高度线性相关的。
通过智能控制装置转速与流量的拟合精度实验,验证灌洗操作时速度与流量能否满足需求。结果显示,该装置流量精度为94.40%。根据蠕动泵转速与灌注液体时压力关系实验,图5中的实验曲线显示压力值随着转速的提高有一定增加。以上实验表明,智能控制装置可以实现较为精确的流量输出,可以满足灌洗时对速度和流量的要求。
4 结论
本研究研制了一种用于新冠肺炎的智能肺泡灌洗系统。智能肺泡灌洗系统配合支气管镜等设备,主要利用STM32对蠕动泵和压力变送器进行控制,实现肺泡灌洗操作中要求达到的相关参数。为了满足灌洗系统的部分功能性要求,对该系统中的灌洗速度、流量以及压力监测开展了一些前期实验。实验结果表明,该系统可以对压力进行监测,并可对速度及流量进行较为精准的控制。因此,智能肺泡灌洗系统可以满足肺泡灌洗操作的功能性要求,可为后续进一步的实验研究提供参考。
猜你喜欢
中国典型病例大全(2022年12期)2022-05-13
中国典型病例大全(2022年13期)2022-05-10
昆明医科大学学报(2022年1期)2022-02-28
现代临床医学(2021年4期)2021-07-31
昆明医科大学学报(2021年3期)2021-07-22
实用老年医学(2021年2期)2021-02-23
河北农机(2020年10期)2020-01-08
电子技术与软件工程(2019年16期)2019-09-17
电子制作(2018年12期)2018-08-01
中国当代医药(2015年36期)2015-03-11
