
智能网联汽车的自主换道控制研究
2022-07-22 14:29付建源
重庆理工大学学报(自然科学) 2022年6期
付建源, 王 栗,华 亮
(南通大学 电气工程学院, 江苏 南通 226019)
0 引言
智能网联车的横向运动控制,是指车辆利用车载传感器、互联网定位系统等获取自身位置相对于期望轨迹的偏差,通过一定的控制策略使其能够按照期望的轨迹行驶[1-3]。智能车在高速、强扰动、低附着的极限工况下的横向控制作为车辆控制的关键技术,是目前智能网联汽车的研究重点。横向控制使车辆保持在车道内行驶,引导车辆进行变道,同时保证安全性以及舒适性[4-5]。

对上述研究进行梳理,车队横向控制的研究存在进一步改善空间:
1) 车辆在极限工况下具有较强的非线性和不稳定性,系统模型参数会存在较大误差,这会导致控制器在设计时存在较大误差,甚至无法保证系统稳定性。
2) 车辆在极限工况下侧向和横摆运动时,容易受到载荷变化、风阻、道路曲率以及低附着等未知外界干扰影响,导致系统无法准确获得外界干扰,进而导致在控制系统设计时,只能人为选取较大的鲁棒项增益,这会导致严重的抖振问题,鲁棒性较差。
鉴于上述分析,提出了一种融合了自适应控制、有界映射改进的RBF神经网络以及干扰观测器的车队换道滑模控制方法。文章结构如下:
1) 分析车辆横向运动规律,建立车辆横向运动的动力学模型;从换道时间、换道轨迹曲率变化、横向加速度等方面,综合考虑安全、快速等要求,建立车辆换道轨迹模型。
2) 通过输入信号有界映射指导神经网络参数初始化来改进RBF神经网络,提高了神经网络的灵敏度;针对系统存在的未知参数或者参数有误差的情况,通过改进的自适应神经网络辨识系统参数,保证了系统的稳定性;利用干扰观测器估计外界时变干扰并进行了补偿,干扰观测器设计过程中,系统未知参数同样使用改进的RBF神经网络进行估计,有效地抑制了抖振。
3) 实验结果在数值仿真平台以及CarSim实车仿真平台中在极限工况进行仿真,验证该算法的优越性以及可行性;最后将单车横向控制推广到多车横向控制,实现智能网联车队的横向控制。
1 车辆动力学建模
针对车辆横向的建模与控制问题,重点考虑车辆的侧向以及横摆运动,模型建立如下[13]:
(1)
式中:y是车辆侧向偏移量,δ是车辆的横摆角,m是车辆的质量,Iz是车绕z轴的转动惯量,kf、kb为前后轮胎的侧偏刚度,lf、lb为车辆前轴后轴到车辆质心之间的距离,v是车辆的纵向速度,d(t)代表车辆受到的包括风速、摩擦、坡度、通信干扰等造成的未知扰动,u为车辆的方向盘转角。
式(1)可简化为:

(2)

2 换道轨迹规划
合理的换道轨迹规划,可以使目标车辆舒适、安全地变换到目标车道,提高换道效率[14]。因此针对不同的换道场景,分别选择余弦换道轨迹以及梯形加速度换道轨迹进行轨迹规划。
余弦换道轨迹设计方便易于改动、换道轨迹最为平滑;在复杂环境下方便进行连续换道;缺点是换道轨迹曲率存在突变。换道轨迹函数为:
y(t)=lb/2·[1-cos(π·t/ld)]
(3)
式中:lb为车道宽度,根据我国标准车道宽度规定,一般取lb=3.75 m,ld为换道时目标车辆的纵向位移。设定目标车在t=5 s完成一次换道,则得到连续换道的余弦换道轨迹,如图1所示。
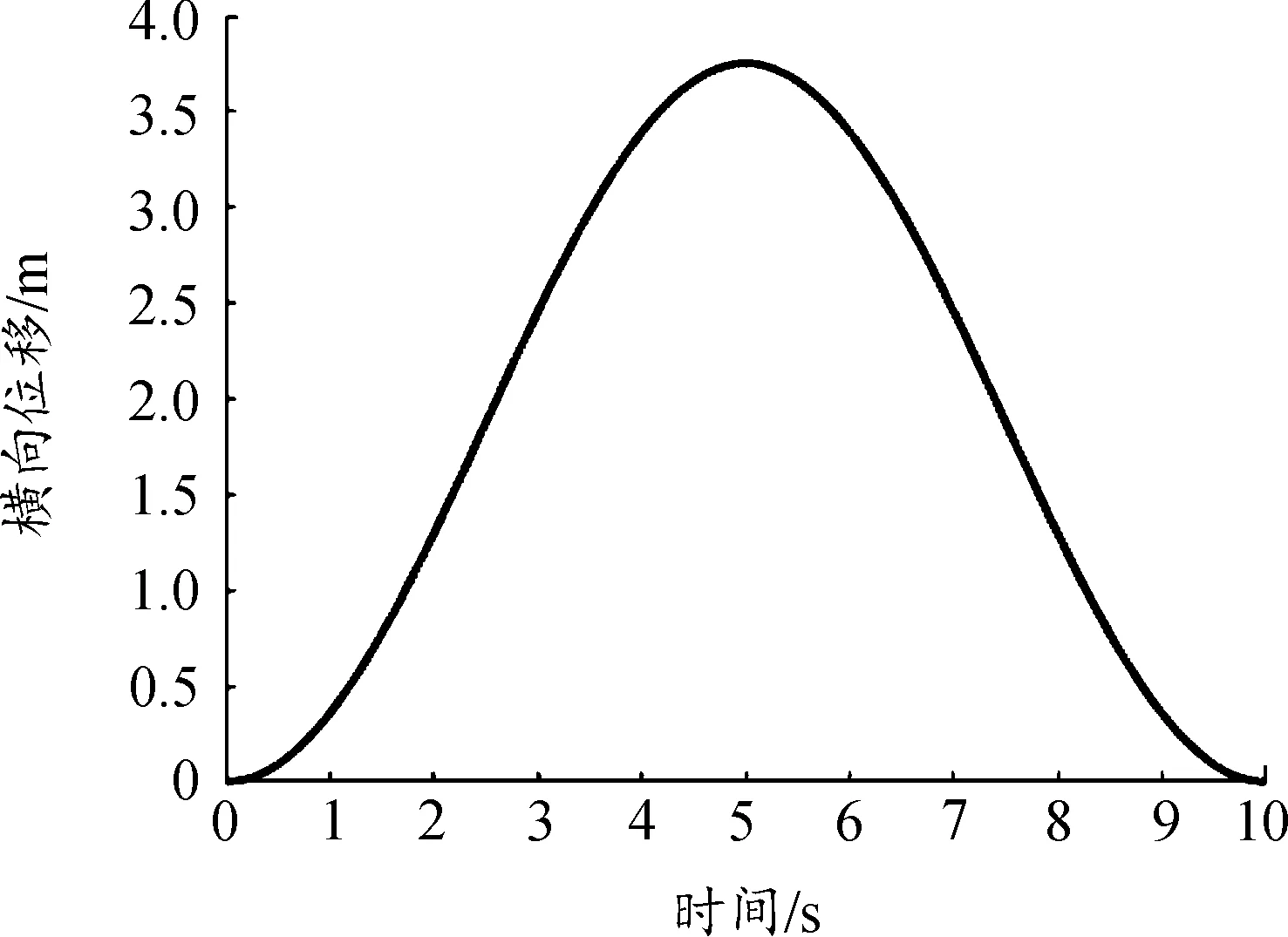
图1 余弦换道轨迹
相比于其他换道轨迹,梯形加速度换道轨迹设计较为复杂,有多个未知参数需要设计。但该换道轨迹曲率连续无突变、可以良好地拟合实际换道路径,是现实中常用的换道轨迹,但实现连续换道需要二次规划。综合考虑换道时间以及乘客舒适度,取横向最大加速度为4 m/s2,车道宽度为3.75 m,对应的换道轨迹方程为:
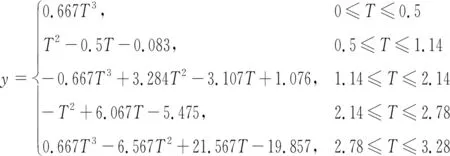
(4)
梯形加速度换道轨迹如图2所示。
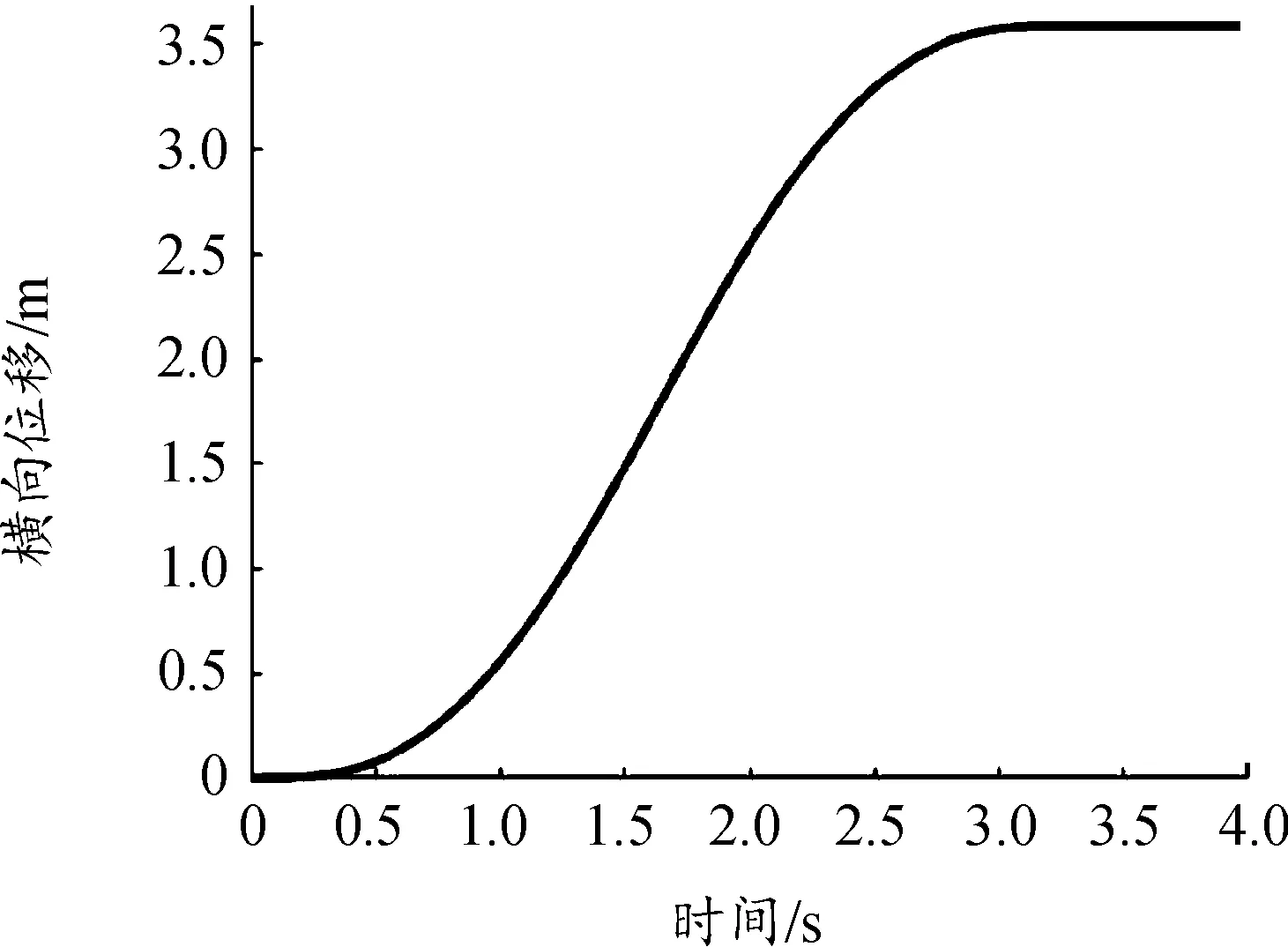
图2 梯形加速度换道轨迹
3 控制方案设计
3.1 控制系统结构设计
控制系统的最终目的就是通过控制方向盘转角,使得车辆跟踪期望的换道轨迹[15]。控制系统结构如图3所示。
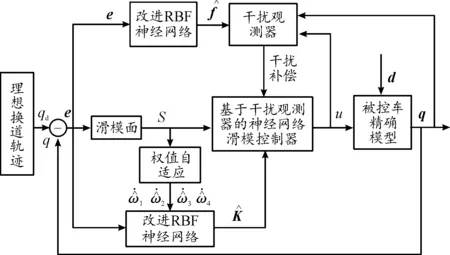
图3 控制系统结构框图
3.2 基于改进的神经网络滑模控制
设计滑模面为:
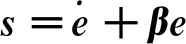
(5)
式中:β=diag(β1,β2),取为正对角矩阵;e为跟踪误差。
为解决传统滑模控制中存在的抖振现象和参数未知的问题,本节设计了新型自适应非奇异快速终端滑模方法。该方法通过有界映射改进的RBF自适应神经网络算法来辨识系统参数,并使用干扰观测器估计系统的外界干扰并拟合。

(6)
式中:ω=[ω1,ω2,…,ωn]T为神经网络权值向量,n代表隐含层节点个数;φ=[φ1,φ2,…,φn]T为隐含层输出向量,隐含层中第i个节点的输出为:
(7)
式中:ci为隐含层第i个节点的中心向量,bi为隐含层第i个节点的基宽,i=1,2,…,n。
通常,RBF神经网络选取误差信号作为其输入信号,但是误差信号的范围在控制器实施之前是无法确定的[16]。因此,神经网络的基宽和中心没有设置的参照标准,会严重影响神经网络的拟合效果。可以使用误差转换函数将无界的误差信号转换为有界的输入信号,从而提高了神经网络的灵敏度。
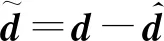
在误差转换函数的设计过程中引入tanh(双曲正切函数),完成RBF神经网络输入信号的转换,如图4所示,tanh函数可表示为:
图4 双曲正切函数
(8)
通过tanh函数可以将输入信号映射到[-1,1]范围内,保证了输入信号的有界性,故RBF神经网络的中心和宽度的取值范围更为准确,提高了神经网络的拟合效果。
基于改进神经网络对车辆时变参数K进行在线估计,使用估计值代替真实值,得到K矩阵的估计值为:
(9)
神经网络的拟合误差为:
(10)
(11)
(12)
(13)

假设1使用改进RBF神经网络拟合参数矩阵K时,存在最优权值与实际值之间的有界的拟合误差。其中,ψim(i=1,2,3,4)为逼近误差的上界,理论上拟合误差ψim的上界趋近于0。
因此,基于输入信号有界映射改进的RBF神经网络权值自适应律设计如下:
(14)
(15)
(16)
(17)
定理1对于考虑的换道控制策略,设计车辆横向换道策略如式(16)所示,可以保证被控系统的稳定性。
(18)
式中:λ为鲁棒项增益;sgn(S)为符号函数。
证明设计Lyapunov函数为:

(19)
对上述Lyapunov函数进行求导得:

(20)
将式(12)—(15)中神经网络权值自适应律代入式(18)中,可得:

-|ST|(λ-|d|)
(21)

3.3 干扰观测器改进方法
为了增强系统的鲁棒性,将干扰观测器与改进RBF神经网络相结合,完成对外界时变干扰的估计,可以有效减少由于鲁棒项而引起的控制力抖振。干扰观测器设计如下:
(22)
(23)

利用输入信号有界映射改进的RBF神经网络对f进行拟合,可以表示为:
(24)
神经网络的拟合误差为:
(25)

假设2使用改进RBF神经网络拟合参数矩阵f时,存在最优权值与实际值之间的有界的拟合误差。其中,ψ5m为逼近误差的上界,由假设1可知,ψ5m=0。
故可以得到基于输入信号有界映射改进的RBF神经网络更新的干扰观测器形式为:
(26)
(27)

设计估计整合参数f的输入信号有界映射改进的RBF神经网络权值自适应律为:
(28)
式中:η5为一正常数。
定理2对于考虑的干扰观测器形式,在原本的滑模控制策略中加入干扰观测器部分后,设计的车辆横向控制率为式(27),仍能保证被控系统的稳定性。

(29)
证明设计Lyapunov函数为:
(30)
假设3外界干扰d为慢时变干扰,因此当k1取较大值时,可以认为:
(31)
对上述Lyapunov函数求导得:

(32)
由矩阵迹的性质可得:

(33)
将上式代入式(30)中,得:

(34)

由上述证明过程可得,所设计的控制器可以正确估计车辆系统时变参数以及外界干扰。
4 实验结果分析
实验分为两部分:首先在Matlab-Simulink平台对余弦换道轨迹跟踪进行数值仿真;然后在CarSim-Simulink联合仿真平台对多项式函数换道轨迹跟踪进行联合仿真。CarSim能够详细地定义整车各系统的特性参数、驾驶员模型、路面参数等信息。通过两次实验以及2种换道轨迹综合验证该方法的可行性、准确性和优越性的要求。本次实验采用C-Class Hatchback车型,车辆以及轮胎的参数如表1所示。

表1 车辆参数
参数辨识部分自适应参数取为:η1=50,η2=5,η3=5,η4=15;干扰观测器部分自适应参数取为:η5=25,干扰观测器增益值取为:k1=5 000,k2=500。高斯基函数参数设计为:中心θi=[0.4,-0.32,0.23,0.1,-0.2,0.12,0.1,-0.2,0.32,-0.4];基宽εi=0.1。外界扰动取d=0.5t+cos(π/3) km/h的时变干扰。
4.1 基于Matlab-Simulink的数值仿真
为了验证被控车在高速以及强干扰的极限工况下的紧急避障效果,假设实验场景为被控车以72 km/h的速度高速行驶,发现30 m外存在障碍物需要换道,且目标车道有车,这就需要被控车在4 s内完成2次换道操作,换道效果如图5—8所示。
图5—8是车辆在匀速行驶时的横向位移曲线、侧偏角曲线以及对应的误差曲线。可以看到在高速且外界干扰较大的极限工况下,被控车实际行驶轨迹对理想轨迹的跟踪误差不超过0.02 m,并随着换道的进行在1 s内误差渐渐减小至0,满足换道的安全性要求;侧偏角曲线与理想曲线基本重合,误差在0.005 rad以内,控制效果良好。可以看到横向位移以及侧偏角的跟踪误差基本存在于换道开始时曲率发生突变的时间点,证明曲率突变对跟踪效果影响较大。
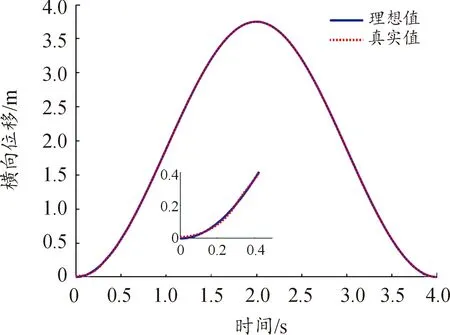
图5 横向位移跟踪曲线
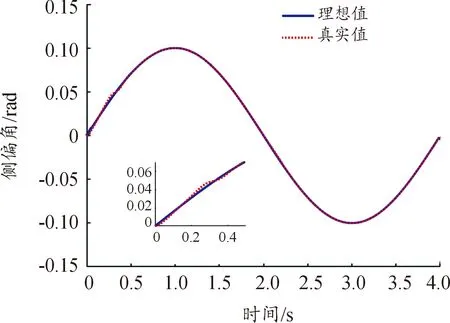
图6 侧偏角跟踪曲线
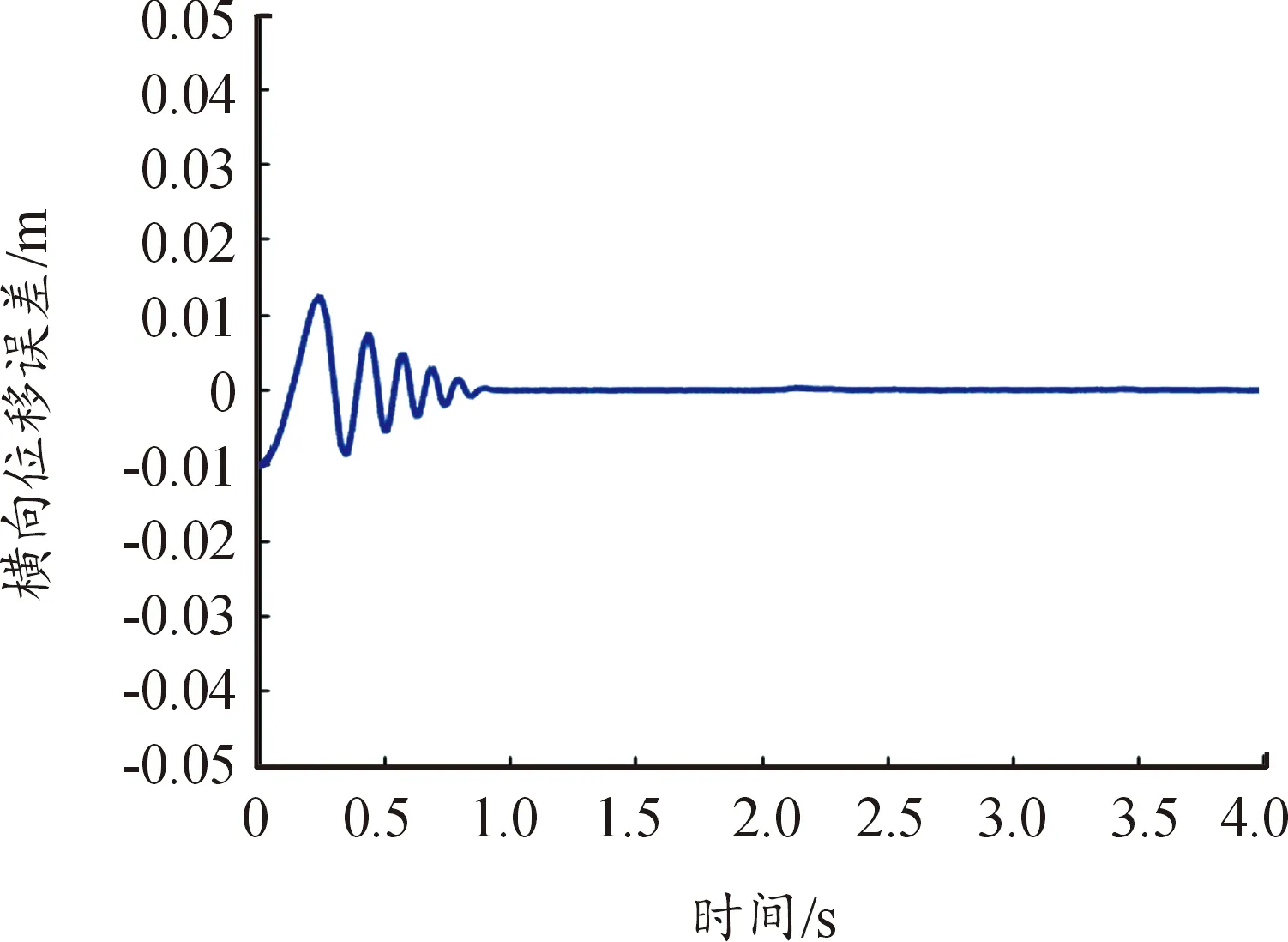
图7 横向位移误差曲线
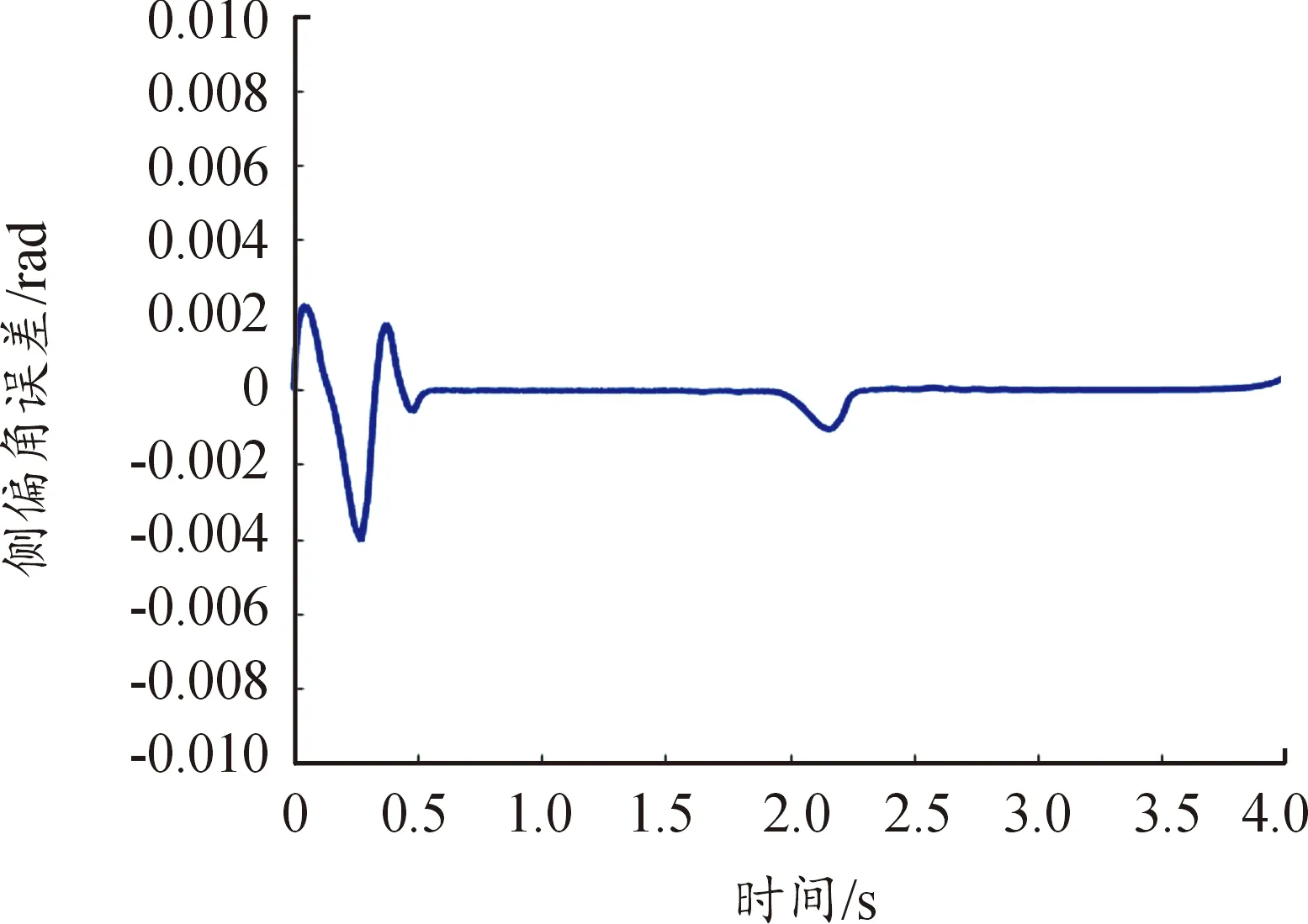
图8 侧偏角误差曲线
为了验证神经网络以及干扰观测器的拟合效果,将仿真时长增加至10 s,拟合效果如图9、10所示。
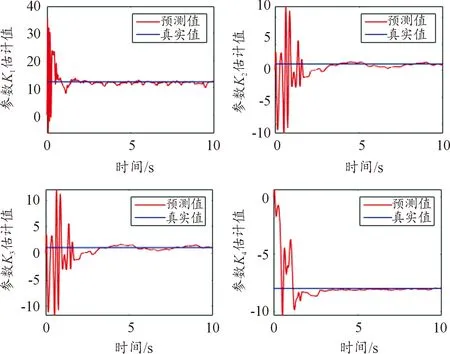
图9 系统参数估计
图9是采用输入信号有界映射改进的RBF神经网络对参数K的估计曲线。可以看到在参数估计的初期拟合值与真实值存在较大误差,这也是车辆换道初期存在误差的原因之一;随着时间的进行,改进的RBF神经网络可以完成对参数的估计。
图10是干扰观测器对外界时变干扰的估计效果。可以看出,设计的干扰观测器可以在0.4 s内快速地估计出干扰的真实值。通过将干扰估计值实时反馈到系统中,可以实现对系统总干扰的补偿,提高了系统的鲁棒性。
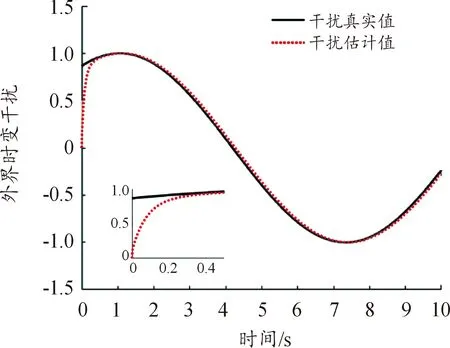
图10 外界干扰的估计
图11是使用干扰观测器补偿外界干扰后的控制力曲线。可以看出,使用干扰观测器对系统集总干扰进行估计并进行实时补偿后,滑模切换增益较小,控制力平滑。图12给出了在固定鲁棒项增益下信号的控制力。可以看出,为了补偿外界干扰人为设定了较大的鲁棒增益,控制信号具有严重的抖振现象。
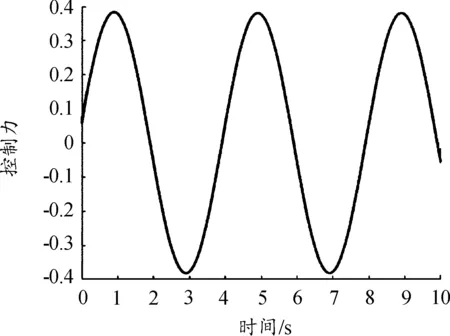
图11 使用干扰观测器补偿外界干扰后的控制力
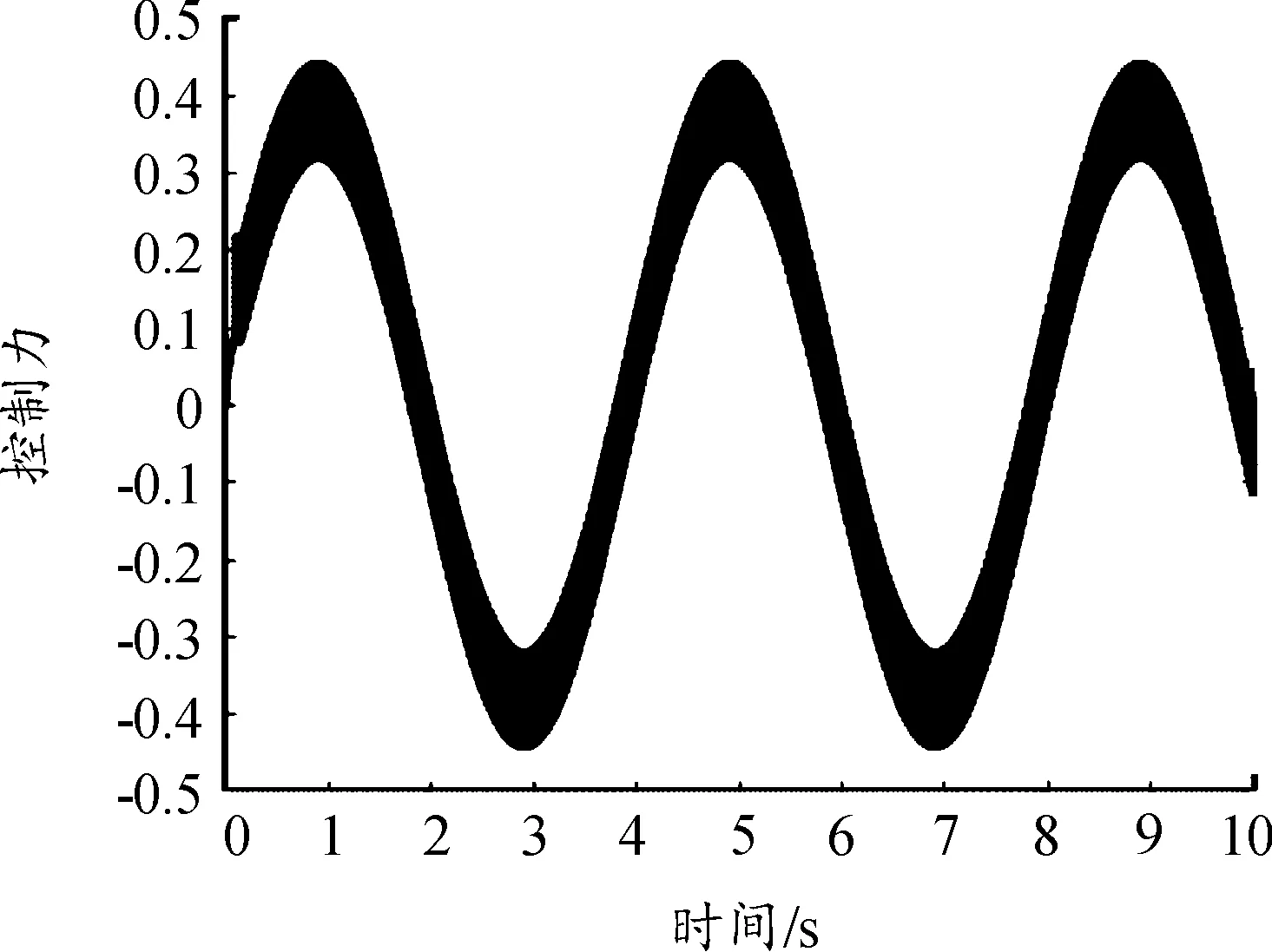
图12 固定增益的信号控制力
为了进一步说明改进后的RBF神经网络是否能在速度发生突变时有效地辨识出系统参数,设定车辆初始速度为36 km/h,在15 s时加速至54 km/h,验证神经网络对系统参数的估计效果。
图13是纵向速度突变时,改进后的RBF神经网络对系统参数的估计效果。当15 s速度发生突变时,模型参数理想值也发生改变。根据图13可得,改进的神经网络在车辆速度发生突变时,对系统参数也有良好的拟合效果。
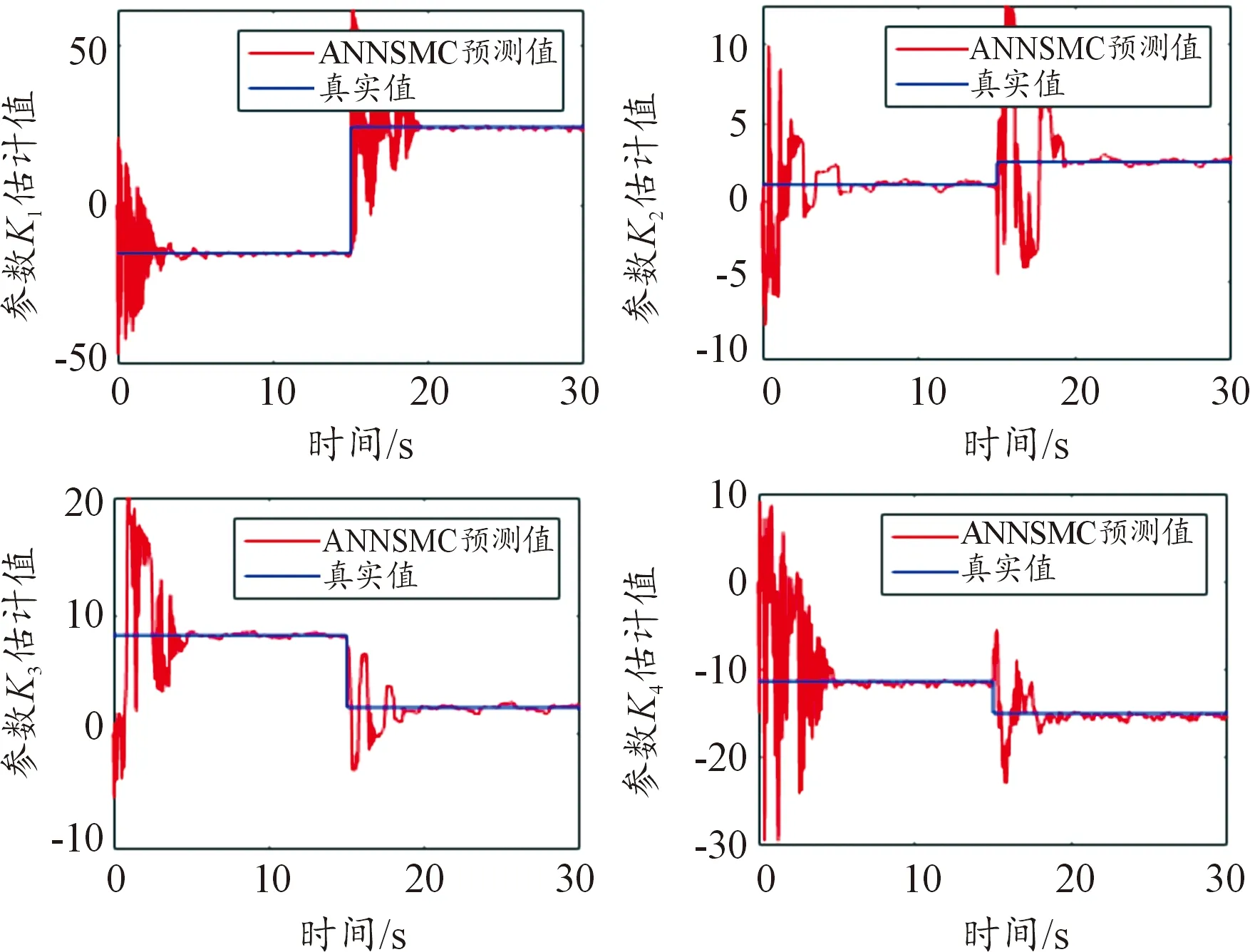
图13 神经网络拟合效果
在传统滑模控制的基础上,加入输入信号有界映射改进的神经网络以及基于改进的神经网络干扰观测器能够有效地估计系统未知参数并可以准确地观测系统集总干扰。此外,在滑模控制律的设计中完成对未知参数以及集总干扰的补偿,可以有效地缓解由于参数未知导致的系统不稳定以及过大的鲁棒项而导致的抖振现象。但由于设定的余弦函数换道轨迹曲率存在突变,在曲率突变时车辆的横向跟踪效果较差。
4.2 基于Simulink-CarSim的联合仿真
为了验证研究的算法能否完成极限工况下的换道要求,联合仿真实验选择梯形加速度换道轨迹,车辆在低附着的潮湿路面上行驶(附着系数为0.35),且外界存在Vwind=3 km/h的风速扰动,车道长度1 000 m,横向宽度为3.75 m。车辆设置为一辆9 km/h缓慢行驶的目标车以及一辆相距80 m的以54 km/h的速度行驶的被控车辆。仿真时长为20 s,在仿真进行到5 s时,被控车辆满足换道条件,开始执行换道;在8.15 s时完成换道并超车,然后目标车继续在该车道行驶。换道过程3D仿真图如图14所示。
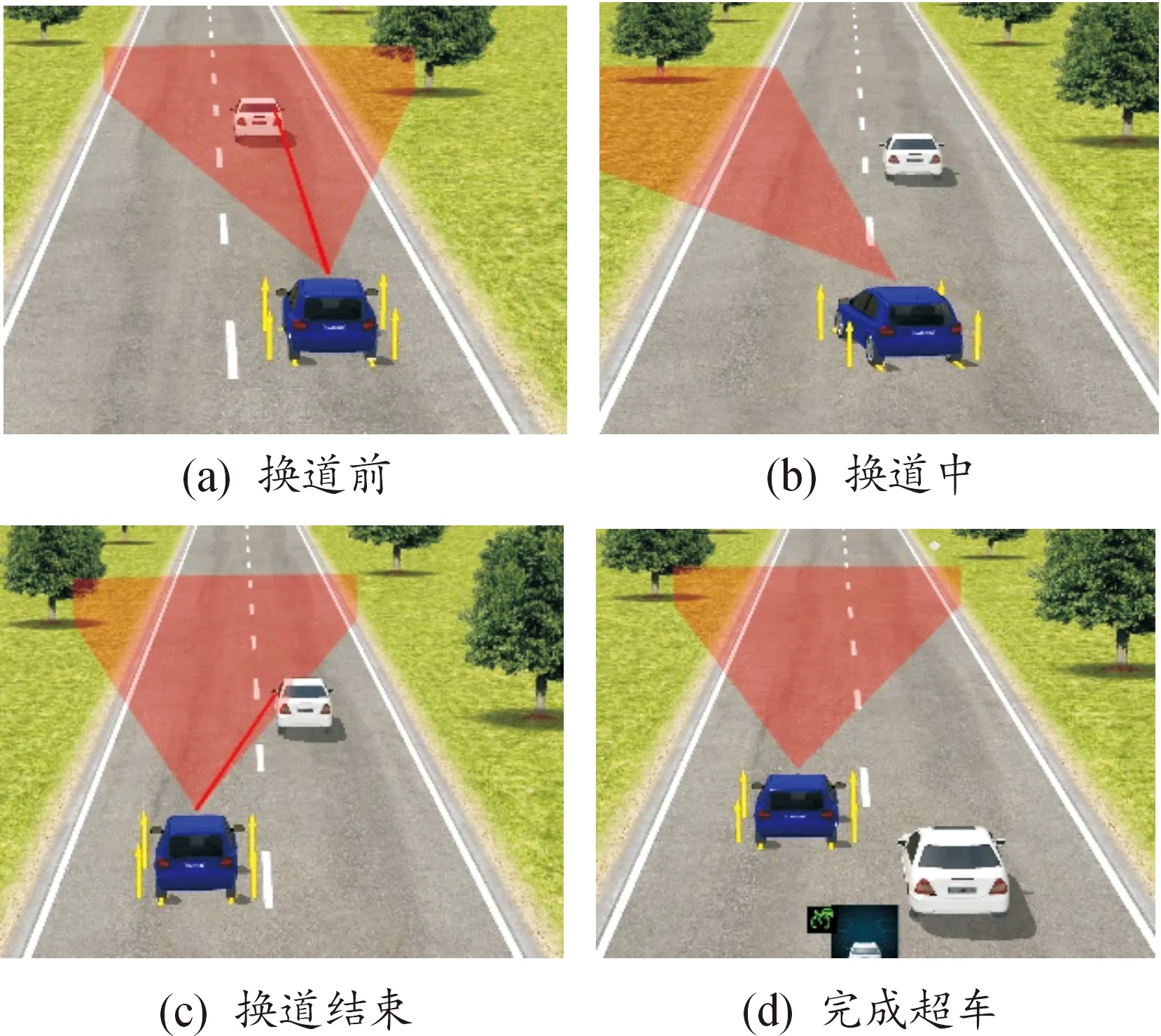
图14 换道过程3D仿真图
从图14中CarSim三维仿真效果可以看出,目标车可以沿着设定换道轨迹完成换道过程,换道过程中目标车的控制输入、侧向加速度曲线以及路径跟踪曲线如图15—17。
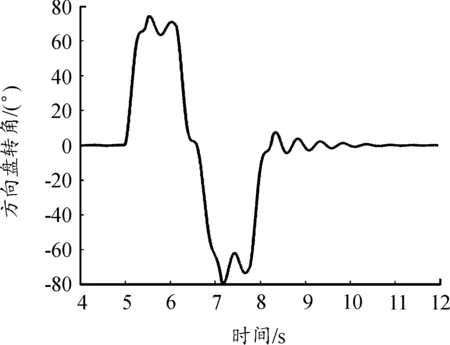
图15 方向盘转角
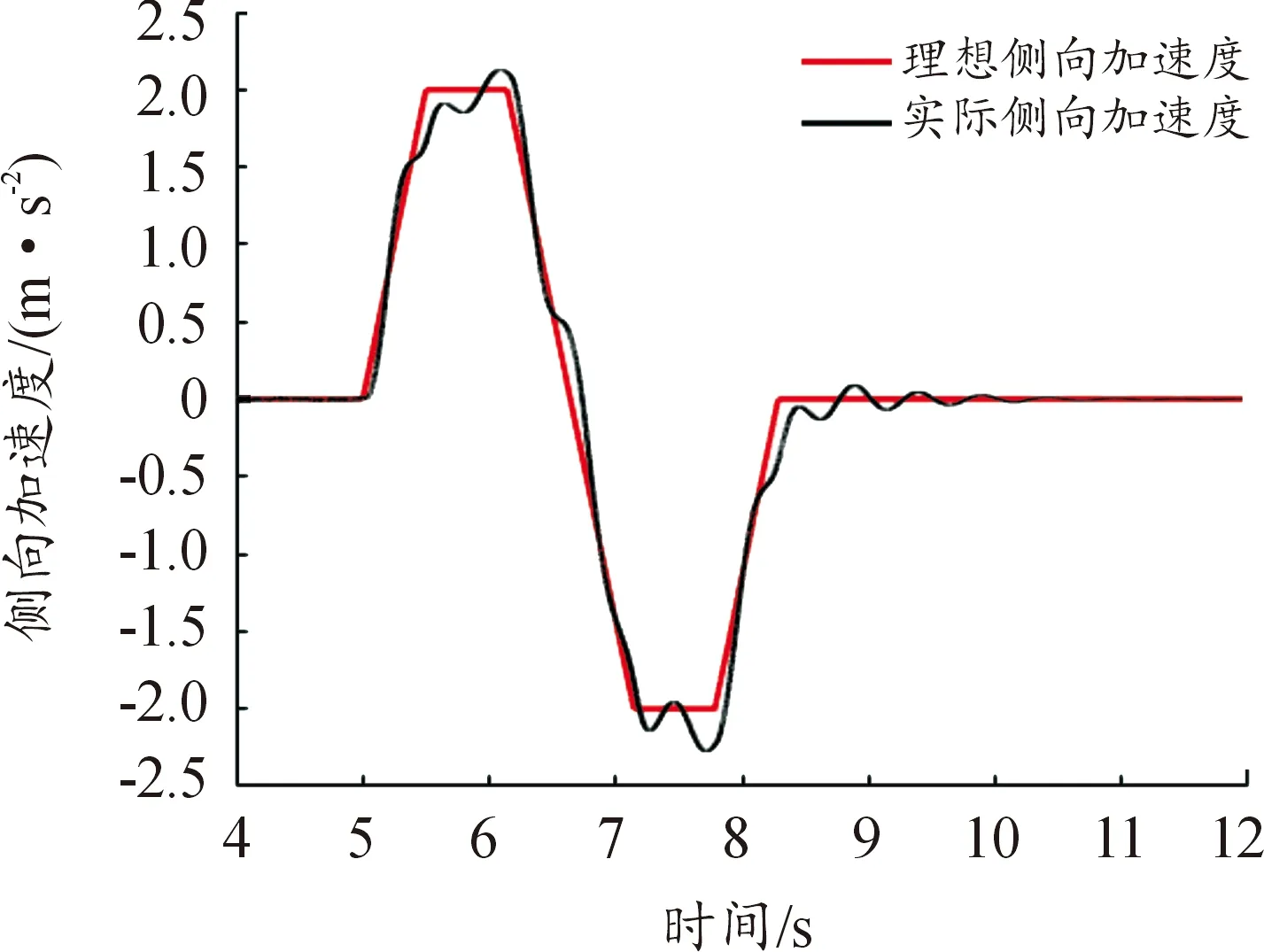
图16 侧向加速度曲线
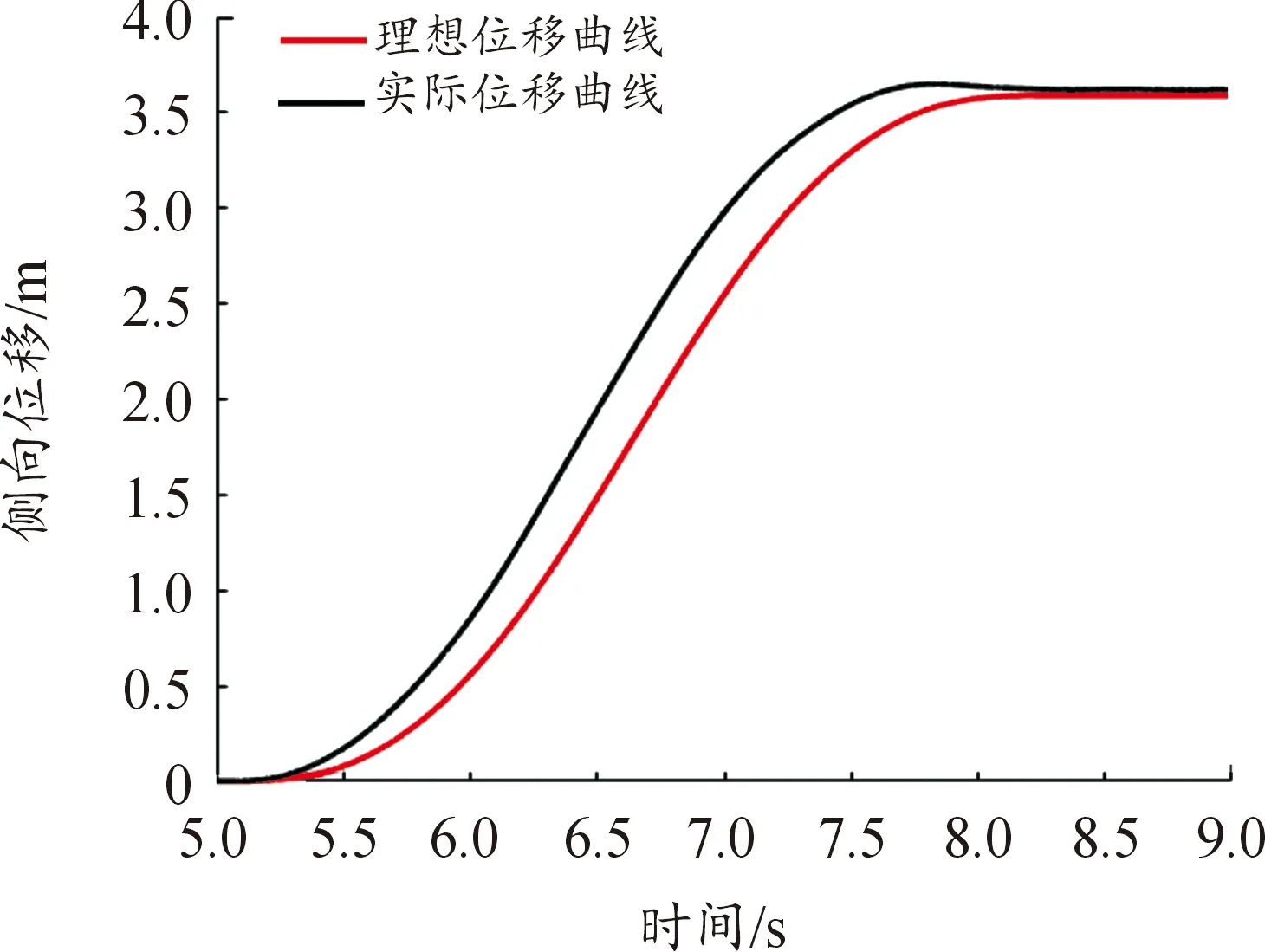
图17 联合仿真路径跟踪曲线
从图15—17可以看出,目标车辆方向盘转向操作符合正常驾驶员转向时方向盘操作;实际侧向加速度可以实现对理想侧向加速度的跟踪,且侧向加速度最大值不超过2.5 m/s2,满足了换道舒适性的需求;目标车可以按照梯形加速度换道轨迹进行换道,并再换道结束后可以完成姿态调整,保证车辆正常行驶,换道操作在3.5 s内完成,且未与障碍车或其他障碍物相撞,满足车辆自主换道的快速性以及安全性。
为了验证极限工况下,智能网联车队能否完成目标轨迹的跟踪,将单车转向拓展到多车;两车车间距为ds=30 m,车速为vs=54 km/h。前车判断需要换道时,在立即执行换道操作的同时,通知后车在ts后进行转向,其中ts=ds/vs。设置通讯有0.2 s的延迟,道路设置为潮湿路面(附着系数为0.35),外界存在Vwind=3 km/h的风速扰动,仿真结果如图18、19所示。
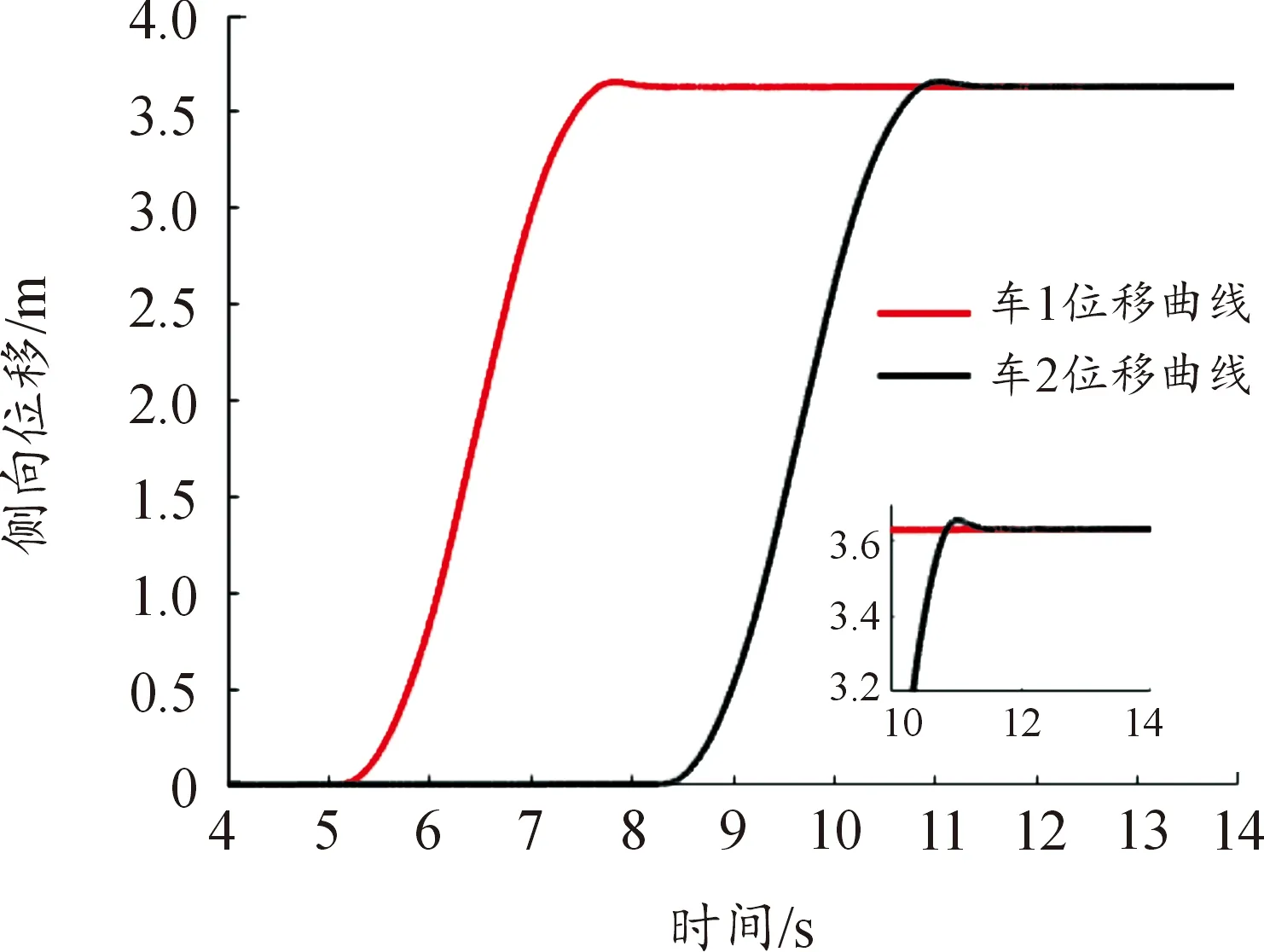
图19 多车换道轨迹
从图18、19可以看出,在前车完成换道后,后车根据前车所给的信息完成换道,在极限工况下依然可以良好地跟踪设定轨迹,完成多车协同换道操作。
综上所述,本节使用梯形加速度换道轨迹作为换道轨迹模型,在联合仿真环境对控制算法进行验证。通过分析仿真数据以及三维仿真动画,证明所设计的滑模控制器能够使智能网联汽车在极限工况下安全、舒适、快速地完成单车自主换道以及多车协同换道。
5 结论
1) 构建了车辆二自由度动力学模型,并对系统方程进行描述,直观得到系统参数存在的不确定性原因。然后基于不同的需求设计了2种不同的换道轨迹,满足智能车实际换道要求。
2) 提出了带有有界映射改进的自适应神经网络、干扰观测器的滑模自主换道控制。通过输入信号有界映射改进的神经网络辨识系统参数,保证系统稳定性,显著减少误差;使用改进的神经网络优化的干扰观测器观测外界时变干扰并进行补偿,可以有效地抑制抖振;利用Lyapunov函数证明设计的控制器可以保证被控系统的稳定性。
3) 分别在基于Matlab-Simulink的数值仿真和基于实车模型的Simulink-CarSim联合仿真中在高速、强干扰以及低附着的极限工况,对多种换道轨迹,验证了设计方法的可行性、准确性及优越性。与此同时,将该控制器从单车控制推广到多车协同控制,为多智能网联车协同驾驶的横向控制研究提供了思路。
猜你喜欢
微电机(2022年8期)2022-10-12
火力与指挥控制(2022年6期)2022-07-25
当代水产(2022年6期)2022-06-29
舰船科学技术(2022年10期)2022-06-17
计算机与数字工程(2022年4期)2022-05-10
西部交通科技(2022年2期)2022-04-27
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
金桥(2018年4期)2018-09-26
科技视界(2017年15期)2017-10-28
