架桥机安全监控系统研究
2022-07-21 10:45朱明清李冬冬杨秀礼
中国工程机械学报 2022年3期
朱明清,李冬冬,夏 昊,杨秀礼
(中交第二航务工程局有限公司技术中心,湖北武汉 430040)
架桥机是公路桥梁施工的重要设备,支承在桥梁结构上,可沿纵向自行变换支承位置,将预制桥梁梁体安装在桥墩(台)指定位置[1-2]。近年来,架桥机使用过程中安全事故频发,给工程造成了极大的损失[3-4]。因此,针对架桥机的安全监控系统研究逐渐成为热点。李春雨等[5]通过PLC 完成对架桥机整个工作过程的数据采集。张焕炯[6]提出了一种基于物联网感知技术的节段梁架桥机监控系统。郑晓雯等[7]提出了基于无线通信技术的架桥机安全监控系统。
现有的架桥机安全监控系统通常存在以下3个问题:①架桥机种类繁多,不同种类架桥机安全监控方案各不相同,且架桥机所采用的PLC各不相同,通信协议不同,没有统一的外部数据访问接口,数据对接工作量大。②大多数安全监控系统只满足国家标准最低要求[8],对其他重要安全风险源的监控,如制动器失效、溜钩、卷扬乱绳等研究较少。③在传统架桥机安全监控系统中,数据监控与视频监控彼此独立,其实质为将两个互不关联的系统从形式上拼凑在一起,系统中各类数据互为信息孤岛,难以形成有效的数据融合应用。
针对上述问题,本文将全面分析架桥机的类型和结构形式,研究制定不同类型架桥机的监控项目及监控方法;同时,还增加制动器失效检测、溜钩监测、乱绳检测等国家标准之外的特色监控功能,以分布式系统为基础,结合数据融合技术和图像识别技术,构建高集成度、高融合度的架桥机安全监控系统,实现对架桥机的全方位安全监控。
1 架桥机安全监控系统设计
为满足不同类型架桥机安全监控需求,设计的架桥机安全监控系统的架构如图1所示。
如图2所示,系统自下而上分为4个层次:感知层、采集层、中枢层以及融合层。系统底层以各类传感器为基础支撑,通过分布式(采集)模块完成数据汇集和数字化转换;数据终端作为运行数据的中枢,一方面与PLC 交互获取架桥机运行信息;另一方面完成各类传感器感知数据的整合。交互终端以高性能多核处理器平台为基础,接入各类视频数据进行处理、分析,同时接入运行数据完成数据融合处理,从而实现多元信息融合的安全监控。
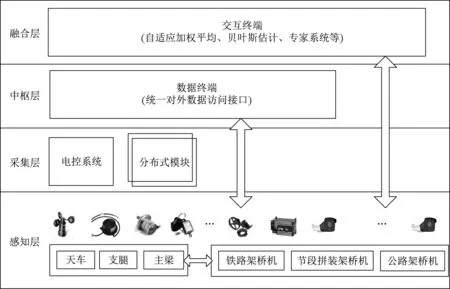
图2 系统层次Fig.2 System hierarchy diagram
感知层由各类传感器和摄像机组成,作为系统的基础支撑,负责图像数据和运行数据的感知。为适应不同类型、不同结构架桥机的安全监控需求,以模块化理念按照架桥机结构对安全监测项目和感知防范进行研究。
分布式模块和架桥机原有电控系统被视作采集层,负责数据的接入和格式化,其中架桥机电控系统为本系统提供如控制指令等各类内置数据,确保监控数据的全面性和完整性。分布式模块作为系统构建的基础,其核心功能是就近获取传感器数据,将模拟信号转换为数字信号并进行统一传输。分布式模块从形式上分为2 种,即总线式和无线式。总线式分布模块与核心采集模块间采用有线连接,可以保证数据的可靠传输;无线式分布模块用于布线困难、采集环境更苛刻的区域,该模块采用无线通信技术与核心采集模块进行数据交互,同时采用低功耗电池供电设计,可以灵活地部署在如架桥机支腿等部位,为对象数据的全面采集提供了有力的平台支持。
数据终端位于系统的中枢层,是数据系统的核心,具有丰富的外部接口,运行实时操作系统。除承担PLC交互和部分数据采集功能以外,该设备一方面作为分布式网络的中心节点存在,承担所有分布式模块的通信维护和数据路由工作;另一方面负责底层数据的预处理工作,完成数据初步整合并交由交互终端处理。
融合层的交互终端位于驾驶舱(或操作员就近区域),采用八核64 位处理器并拥有数个协处理器,具有极强的图形处理和推理计算能力。交互终端内置图像处理、神经网络、空间几何、专家系统等基础算法模块,负责各类数据的接入、融合并产生实时监控结果和实现人机交互。
2 架桥机安全风险识别及监控方法研究
架桥机按照类型可分为节段拼装架桥机、公路T 梁架桥机和铁路架桥机,按照结构部位分为起重天车、支腿和主梁,按照驱动方式可分为液压驱动和电机驱动。本文按照结构部位分别对不同类型、驱动方式的架桥机监控项目进行研究,确定最佳的监控方式。
2.1 起重天车安全监控研究
不同类型架桥机的起重天车结构形式基本一致,因此,其监控项目和监控方式也基本相同。经调研,天车的安全风险主要包括超载、超限(超速)、制动器失效、溜钩和乱绳,对于超载和超限(超速),通过加装起重量传感器和行程编码器,进行采集和预警。对于天车起升高度,通过在卷扬机减速机轴旁接绝对值编码器采集,检测当前卷扬机的滚轴的转动圈数,然后通过滚轴的半径等确定的参数计算出当前的起升高度、起升速度、起升方向,实现超速报警,超限报警。对于天车行程,通常采用齿轮+编码器以及计程轮+编码器的方案,前者仅适用于齿轮齿条啮合传动的场景,使用较少,后者因安装方便,使用较为广泛,通过编码器能够精确地知道当前天车的位置,控制天车的位置、行驶的距离和行驶速度。然而,当天车长时间运行后由于轮子打滑、轨道不平整等原因,使得编码器测量的行程不准确。为解决上述问题,提出采用行程开关和激光雷达融合的方式对天车行程进行校准,将激光雷达安装在天车横梁上(见图3),在轨道末端安装反射板,当天车距离轨道末端距离在20 m 以内时,激光雷达占据主导地位,以激光雷达采集的数值作为天车行程;当激光雷达和编码器测量的结果偏差大于50 cm 时,系统会进行预警,提醒工作人员此时编码器行程可能不准,需要对编码器进行检查及标定,通过固定位置的行程开关对编码器行程进行标定,保证天车在架桥机长时间的工作时候能保持正确的行程。

图3 激光雷达Fig.3 LIDAR
除上述常规监测项目外,制动器失效、溜钩和卷扬机乱绳也是需要关注的安全风险。
2.1.1 制动器失效检测
制动器是起升机构必备的安全装置,制动性能的好坏有可能会直接威胁到设备的安全,现有技术手段,制动性能可以通过制动器开闭状态、制动距离、闸瓦磨损量3个指标进行评估[9]。
(1)制动器开闭状态监测。通过在制动器上加装行程开关或接近开关来判断制动器是否正常打开,属于国家标准强制要求监测项目。当系统检测到制动器失电信号,但是未检测到制动器开启状态,说明制动器有可能出现故障。
(2)制动距离监测。制动距离指的是系统检测到制动器失电信号到重物完全停止这段时间内卷筒滚动的距离,当制动距离大于极限制动距离[9]时,说明制动器可能存在安全风险,需要立刻停机进行检查。制动距离可以通过检测该段时间内卷筒旋转的圈数,结合卷扬几何尺寸,将其转化为制动时的钢丝绳下降的距离。当制动距离接近或超过极限制动距离时发出预警信号,提示制动性能下降,制动距离Dz计算式如下:

式中:H1为制动器开始闭合时的高度值;H2为起升达到稳定状态时的高度值,稳定状态是通过编码器的物理特性来进行判定的。
(3)闸瓦磨损量监测。制动器是通过衬垫与卷筒间的摩擦力来实现制动的,目前架桥机使用的制动器包括块式制动器和钳盘式制动器。一旦制动器衬垫发生严重磨损,可能导致制动性能下降。对于盘式制动器,在支架上安装2 个接近开关检测制动器开闭状态和闸瓦磨损。对于块式制动器,在制动器蝶杆上安装接近开关检测闸瓦磨损状态。
上述2 种方法主要通过两边闸片支架间距判断闸片磨损情况,闸片支架间距是每侧闸片的磨损间距和闸盘的每侧磨损间距之和,但实际工况下,由于安装手法不同,每一边闸片磨损程度不同。传统监测方法在双边闸片磨损不同步时可能会失去预警作用,严重磨损的那侧闸片更换不及时容易造成安全事故。
针对上述问题,提出了一种全新的制动器磨损检测方法(见图4),在靠近每个闸片的一侧放置2根电极端头(1.5 V),电极安装的位置根据磨损要求可以调整。当闸片磨损到一定程度时,2 个电极就会触碰到金属闸盘,由于制动器的闸盘和闸片都是金属的,可以导电,从而接通监测预警电气系统,触发报警,提醒设备维保人员对制动器进行安全检查,确保卷扬机始终处于健康工作状态。该监测系统结构简单,成本低,可扩展性强,首次安装后免调节,可以判断具体每块闸片是否磨损到需要更换的程度,并且电气隔离可以接入上级控制系统。
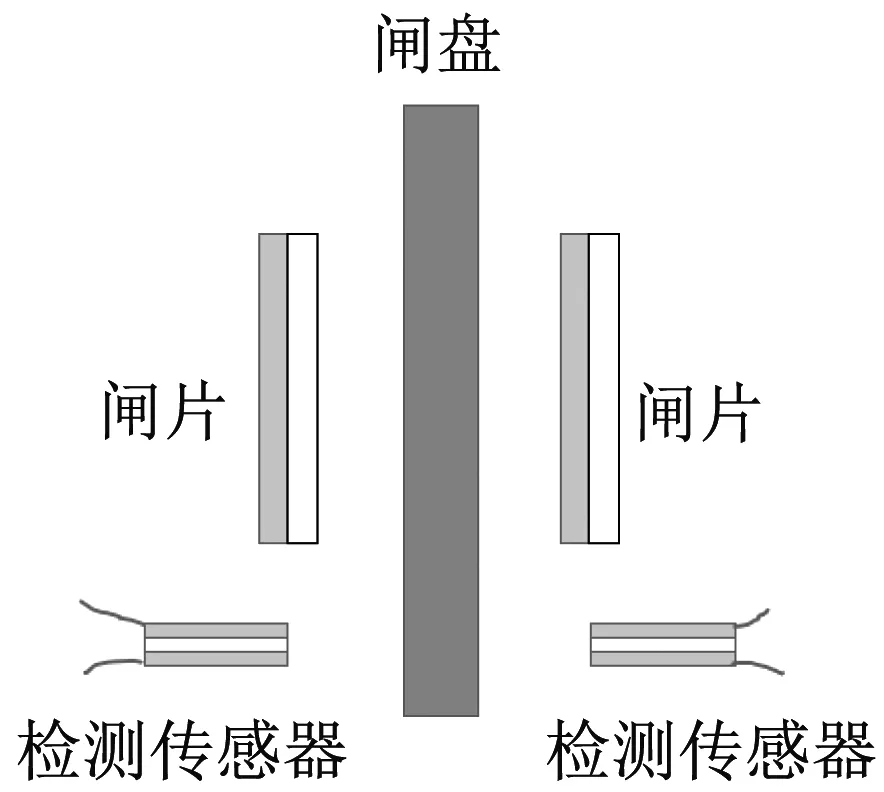
图4 制动器检测传感器安装Fig.4 Installation diagram of the brake detection sensor
2.1.2 溜钩检测
起重机溜钩是操作过程中比较常见的问题,可能会带来比较严重的安全事故,应该严格杜绝溜钩的发生,最好做到提前预防。狭义的溜钩是指天车起吊后制动,吊物下降距离超出规定的制动距离。但是这种定义忽略了两种情况:①接收到制动器关闭信号,但是一定时间内还没有达到稳定状态;②制动器闭合后达到稳定状态,但是重物突然向下滑动一段距离,再次到达稳定状态。
对于第1种情况,系统实时计算当前高度与制动器关闭时间点的起升高度之间的差值Dl,当Dl≥极限制动距离时,系统会进行溜钩预警;对于第2种情况,系统会计算起升第2次到达稳定状态的高度值与第1次到达稳定状态的高度值之间的差值Dl,当Dl≥设定的安全值时,系统也会进行溜钩预警。
2.1.3 乱绳检测
乱绳通常发生在钢丝绳回收过程中,由于盘绳器或其他原因,导致钢丝在卷扬上排列错乱,乱绳如果不及时解决,会加剧钢丝绳之间的磨损,甚至导致钢丝绳报废,增加运行成本和维护费用。传统的安全监控系统通过安装在卷筒上方的摄像头对钢丝绳进行摄像,由驾驶室司机人工观察判断是否发生乱绳。这种方法不仅费时费力,而且可能出现判断错误。该系统采用视频监控的方式获取卷扬区域的图像,通过传统视觉算法结合神经网络利用预先训练的图像识别算法识别钢丝绳卷扬上的边界区域,如果识别到钢丝绳乱绳,则发出预警。此外,该系统还会实时地将钢丝绳卷扬的视频显示在卷扬检测终端上,操作人员也能实时观察到卷扬的情况,在发生乱绳时停机处理,大大提高了设备运行的可靠性。
具体路线如图5 所示。首先对卷扬区域进行对象识别,准备5 000 张卷扬区域照片作为训练数据,对数据集进行预处理,利用准备好的数据对卷积神经网络模型,进行训练得到训练好的模型,用该模型可以识别到摄像头中的钢丝绳区域;然后对图像进行归一化处理,因为不同项目拍摄的角度不同,导致卷扬区域的方向也各不相同,需要进行归一化处理,对图像进行平移、旋转等操作将特征块图像归一化为统一角度、统一像素(200×100)的图像(见图6);最后采用方向梯度直方图(HOG)特征子和支持向量机(SVM)分类器来判断钢丝绳排列是否整齐。此时需要先提取HOG 特征并贴标签,排列整齐的定义为1,排列不整齐的定义为0;然后利用SVM 进行训练;最后对输入的图片进行HOG提取,用特征点进行特征识别。

图5 乱绳识别技术路线Fig.5 Technical route of identification of tangled rope
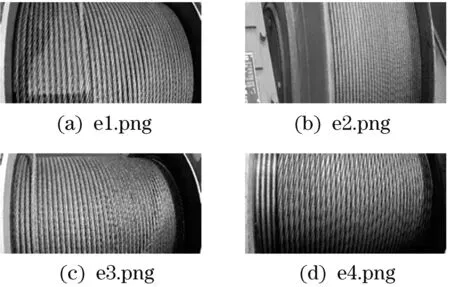
图6 归一化后的卷扬区域图像Fig.6 Normalized image of the rope area
2.2 支腿安全监控研究
支腿的主要安全风险是倾覆,当然造成倾覆的原因很多,有可能是由2 个支腿高度不一致、支腿水平力过大、应力过大等因素导致的。通过检测支腿的水平倾角能够判断2 个支腿顶升的高度是否一致,避免架桥机整体不平整,检测支腿的垂直度能够判断当前架桥机的稳定性,此方法适用于所有类型架桥机。对于铁路架桥机,由于前支腿是主要的受力单元,为防止倾覆,需要对前支腿的水平力进行监测,通过安装在斜杆上的销轴传感器进行测量,对于前支腿,结构应力状态尤其重要,可通过在支腿上安装应变片进行应力监测。
2.3 主梁安全监控研究
主梁的安全风险主要是倾覆,通过安装在主梁上的双轴倾角传感器可以对主梁的倾斜状态进行测量,同时,主梁的过孔行程也需要精确控制,对于铁路架桥机,过孔通过后方的O 型支腿驱动,其行程可以通过加装计程轮和绝对值编码器进行采集。对于节段梁拼装架桥机,通常采用液压驱动主梁前进,通过内置的拉线传感器和压力传感器采集主梁行程,对于公路架桥机,通常采用电机驱动主梁前进,通过加装齿轮和编码器进行行程采集。
3 工程应用
3.1 系统研制
依托深圳盐港东立交桥项目,在一体化架桥机上部署了全新的架桥机安全监控系统,传感器布置方案如图7 所示。下面对系统研制情况进行介绍。
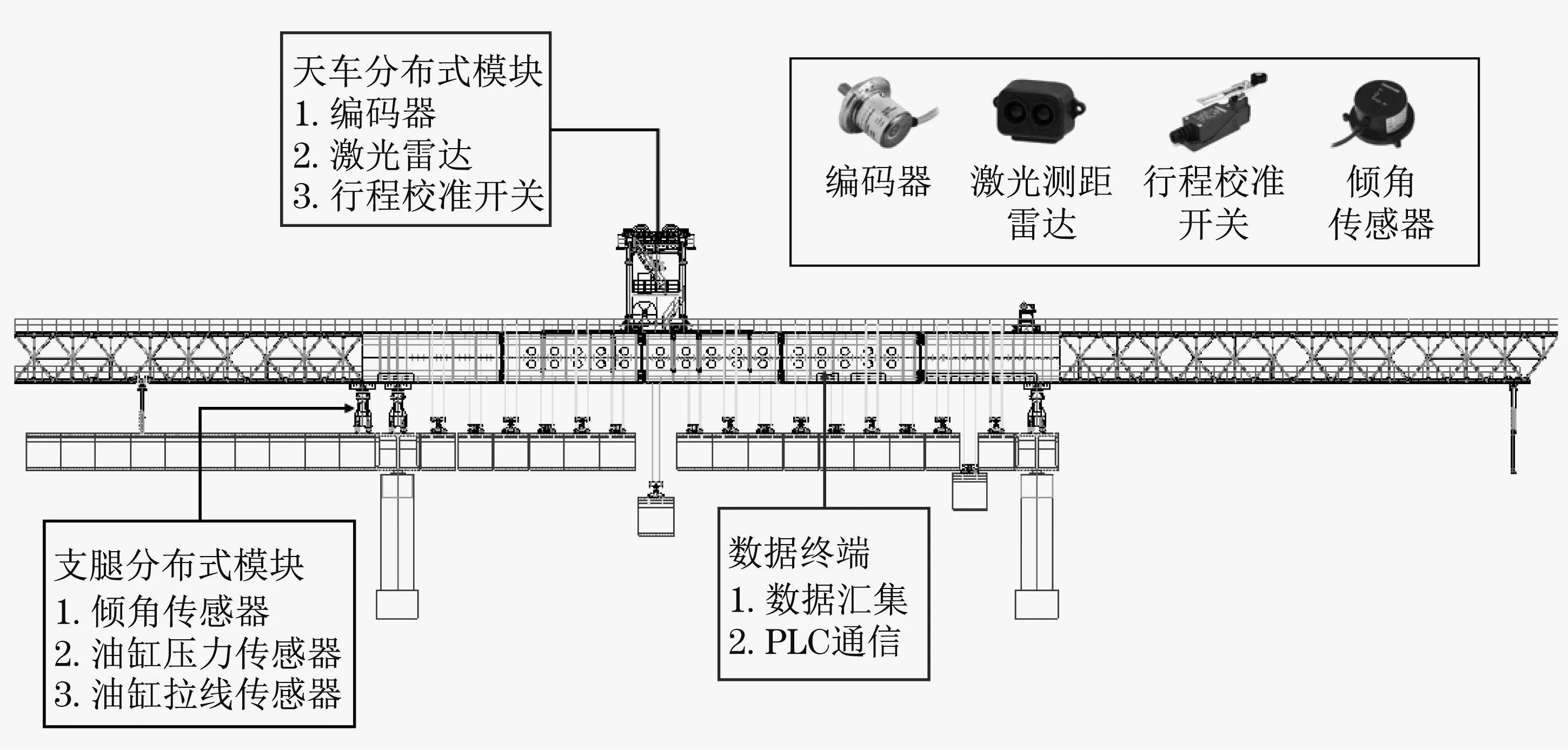
图7 架桥机安全监控系统部署总览Fig.7 Overview of the safety monitoring system of bridge construction machine
3.1.1 分布式模块和数据交互终端
天车分布式模块本身具有IP67 级防护,在安装的时候考虑到原有的天车线缆布线的情况,将分布式模块放置在天车的控制柜中,通过控制柜下方预留的走线孔进行走线,部署位置如图8 所示。监控终端为64位八核处理器平台,具有4G、GPS定位等功能,是现场数据处理的重要设备,该设备部署于主控柜附近,本次现场实装对远程通信状况进行了测试,传输情况良好,现场系统至服务器端数据传输整体延时约为200~300 ms,具有极高的实时性,远高于行业水平。

图8 天车分布式模块放置位置Fig.8 Position of the distributed module of crown crane
3.1.2 PLC数据采集
架桥机状态数据均来自架桥机自身PLC,一体化架桥机采用了美国AB 公司研制的PLC,通过Ethernet/IP 协议与外界进行通信,与PLC 的交互联通性测试是此次实装测试最重要的任务之一,现场测试已完全实现了与PLC的交互,并通过主动触发限位器等手段对数据有效性进行了验证。
3.2 应用效果
在部署架桥机安全监控系统后,一体化架桥机共计架设节段梁233榀、过孔20次,在架桥机提梁、落梁、纵移过孔、整机横移等过程中,安全监控系统能够实时有效地反映监控数据、反馈预警,较好地为设备操作人员提供可视化监控和安全预警,为项目管理人员提供制动器健康检测、遛钩检测等功能,起到积极引导作用,大大提高架桥机本质安全状态,实现对架桥机的全方位安全监控。
4 结语
本研究对架桥机的类型和结构形式进行了全面分析,制定了不同类型架桥机的监控项目及监控方法,增加了起升机构制动器失效检测、溜钩检测、乱绳检测等特色监控功能,采用了分布式模块和高精度数据采集技术,融合了视频监视和图像分析算法,研发了一套适用于各类架桥机的安全监控系统,并成功应用于盐港东立交一体化架桥机,实现了对架桥机的全方位安全监控。
本研究将安全监控项目的全面性、数据采集的准确性、人机交互的友好性、系统的可靠性进行了提升,并扩展了安全监控系统的适用性。这些技术性能的提升,将为特种设备的安全监控提供更有效的技术支撑,因此本系统的研究具有重要的实用意义和推广价值。
猜你喜欢
机电信息(2022年9期)2022-05-07
现代制造技术与装备(2022年1期)2022-02-21
煤气与热力(2021年6期)2021-07-28
科学技术创新(2021年14期)2021-05-28
科教导刊·电子版(2021年36期)2021-01-02
中国科技纵横(2020年5期)2020-06-29
筑路机械与施工机械化(2018年10期)2018-11-26
科学中国人(2016年18期)2016-12-23
汽车科技(2015年1期)2015-02-28
汽车零部件(2014年5期)2014-11-11