河道黑臭水体原位修复无人船控制系统的设计*
2022-07-21 02:57戴有华金文忻陈秀珍
自动化技术与应用 2022年6期
吴 丹,戴有华,金文忻,陈秀珍
(江苏农林职业技术学院,江苏 句容 212400)
1 引言
随着城镇化的推进,人们的生活水平越来越高,但是环境污染问题却是越来越严重。其中,水质的污染是一个重要的问题,由于缺乏有效治理,致使原本清澈的河水渐渐变成了黑臭水体[1]。这样的黑臭水体除了散发出阵阵怪味、影响市容市貌以外,还严重影响了人们的生产及生活用水。因此,黑臭河道的治理已经成为迫在眉睫的问题[2]。目前,针对黑臭河道的治理主要有物理方法、化学方法和生物方法三种。比如清淤、曝气充氧等是物理方法,投絮凝剂和强氧化剂等是化学方法,微生物强化修复、水生植物修复等是生物方法。但是无论使用哪种方法,都需要人工进行操作,但人长时间处于黑臭河道内会影响身体健康[3-5]。
采用无人驾驶船(无人船)替代人工进行黑臭河道的治理是大势所趋,针对本地区黑臭河水的特点,本文的无人船在进行黑臭河道治理时采用了物理方法、化学方法和生物方法相结合的治理手段。在河道内曝气增氧[6]、并且根据需要自动投入微生物菌剂、碳纤维生态草,已到达无人化治理黑臭河道的目的[7-9]。
2 河道黑臭水体原位修复无人船控制系统概述
本文的无人船控制系统[10-12]主要由电源系统,PLC控制系统、触摸屏组成。
电源系统由有蓄电池、光伏板和逆变器组成,晴天时可由光伏板发电为蓄电池充电,若连续阴雨天也可由市电给蓄电池充电;若无人船在工作时,光伏板也可直接发电为无人船供电,提高无人船的续航能力。逆变器将蓄电池的直流电逆变为220V交流电,供无人船上的交流电动机运行。
PLC控制系统主要由相关接触器、热继电器、断路器、按钮、相关执行元件和西门子S7-200 SMART 小型高性能PLC组成,控制无人船的航行和完成黑臭河道的治理工作。其中相关执行元件的名称和作用见表1。
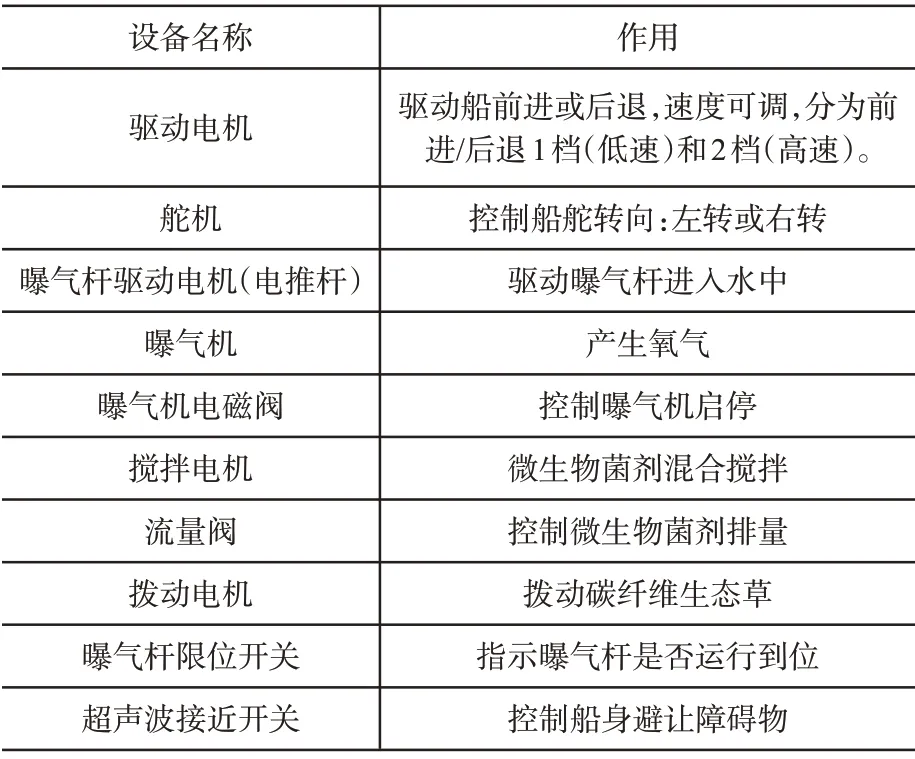
表1 无人船控制系统主要执行元件
触摸屏作为人机界面,主要功能是向无人船发出指令和监测各设备运行情况。
3 无人船控制系统方案设计
无人船在进行修复作业时,要求控制系统稳定可靠,修复效率高,具有手动和自动两种模式。在手动模式下,可以自主控制无人船的速度、转向、曝气增氧的启停、微生物菌剂的投放和碳纤维生态草的投放。在自动模式下,无人船能自主航行、避障、自动进行曝气增氧、定点进行微生物菌剂和碳纤维生态草的投放。据此,总结出无人船的控制系统需求如下:
(1) 驱动电机速度可调,分为前进2档和后退2档,每档分别用相应的按钮开关控制;
(2) 舵机控制无人船左转或右转,左转和右转之间互锁,防止舵机短路;
(3) 无人船在河道内采用“S”型轨迹进行航行,尽可能全面修复河道内的黑臭水体。见图1。
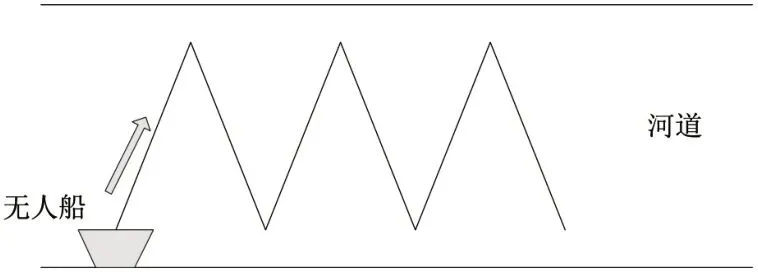
图1 无人船航行轨迹示意图
(4) 船两侧的曝气杆由电推杆推入或推出水中,曝气杆推入到位后,由限位开关控制电推杆停止工作;
(5) 在电推杆启动的同时需同时启动曝气机的电磁阀,保证曝气杆入水时能排出氧气,曝气机由电磁阀控制其氧气的排出;
(6) 需要进行微生物菌剂混合时,则启动搅拌桶内的搅拌电机,当搅拌充足后,开启流量阀将液体流入河道,流量阀根据需要采用PID自动控制;当需要进行碳纤维生态草混合时,启动碳纤维生态草拨动电机,根据需要打开电磁阀向河道内排入碳纤维生态草;
(7) 船身四周装有四个超声波传感器,当船身左侧传感器检测到障碍物时,启动舵机右转,当船身前方检测到障碍物时,启动驱动电机的后退1档,以此类推。
根据控制需求,整个系统的主控制器选择S7-200 SMART,并且带模拟量输入输出模块,与触摸屏MCGS 采用RS485通信。控制系统的框架图见图2。
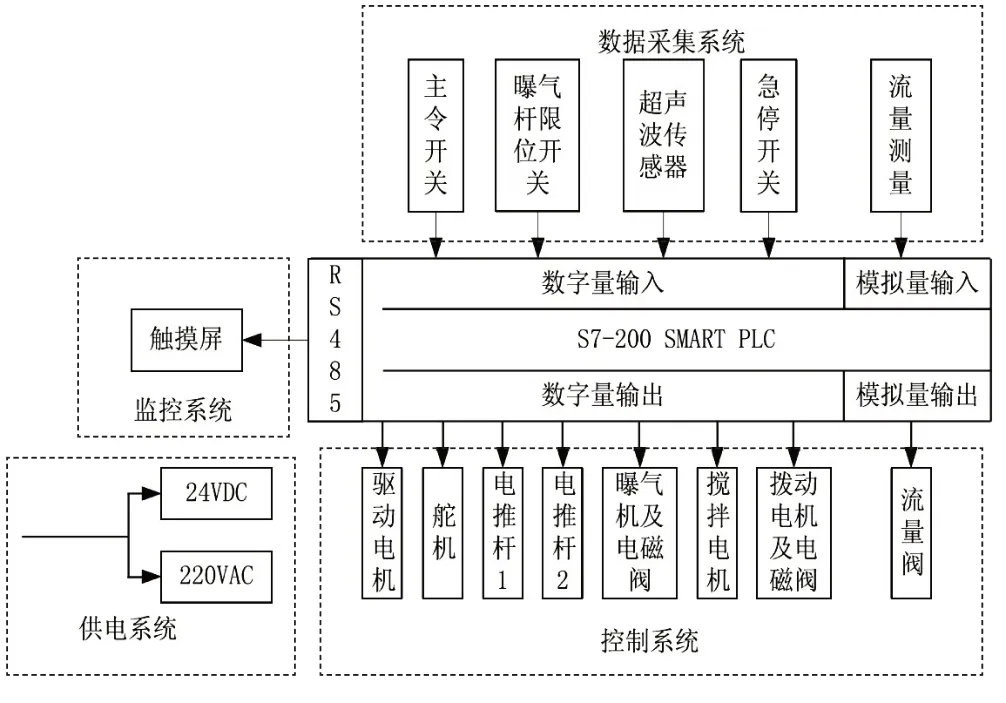
图2 控制系统框架图
4 系统软硬件设计
4.1 PLC硬件设计
本系统采用西门子S7-200 SMART PLC SR60作为主控制器,硬件设计考虑手动控制需求和系统的安全性能,为每个电机分配了各自的启停按钮,并安装了急停按钮。模拟量输入/输出中,COD传感器的数值作为流量阀开度控制的依据。系统的I/O分配表如表2所示。
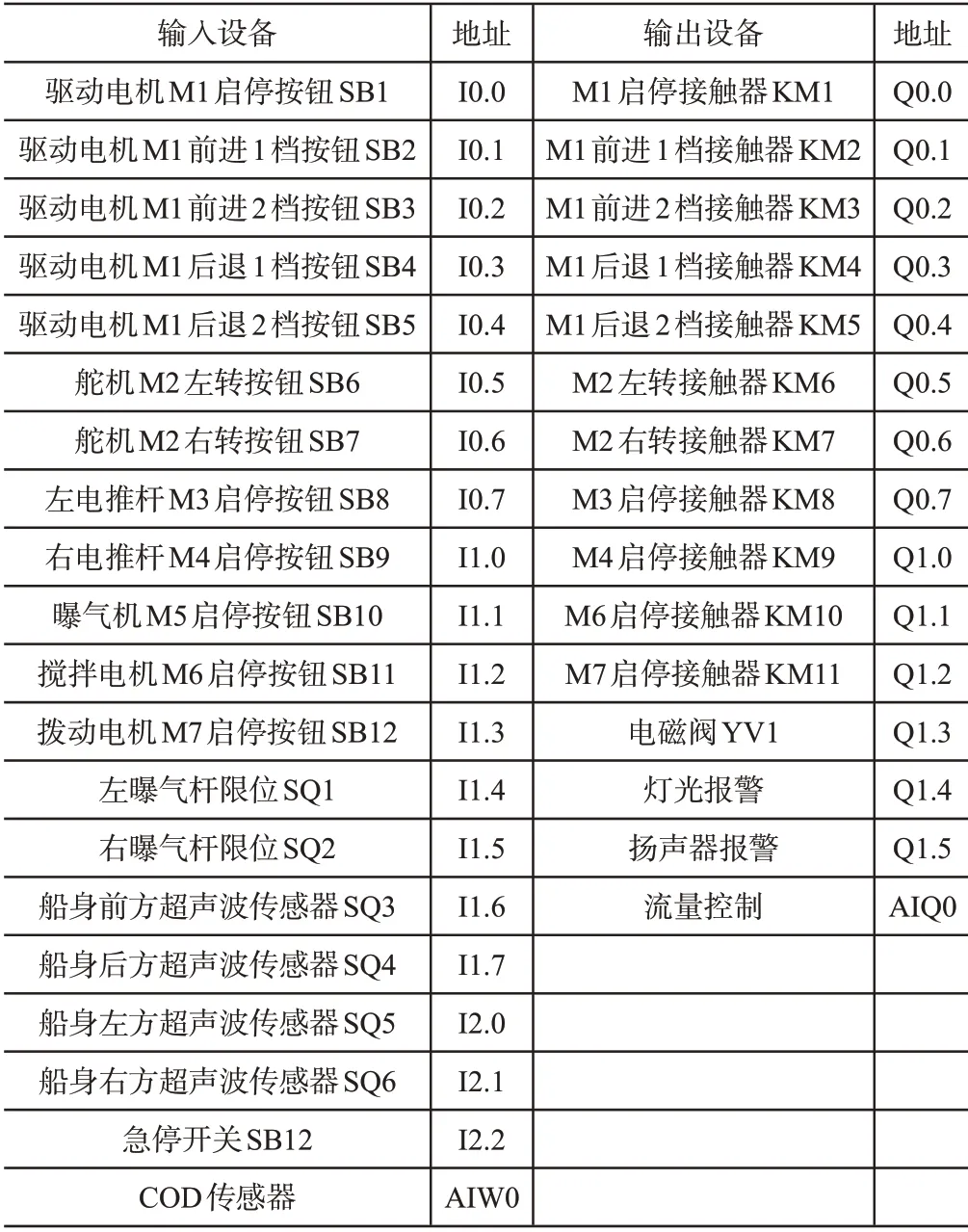
表2 I/O分配表
4.2 软件设计
软件采用STEP 7-Micro/WIN SMART编程软件,是西门子公司专门为S7-200 SMART PLC设计的编程软件。
根据控制需求,将程序分为三个部分,分别为:无人船航行控制系统、曝气增氧控制系统、微生物菌剂和碳纤维生态草投放控制系统。三个部分的程序流程图见图3、图4 和图5。流程图均表示在自动条件下运行过程,手动运行在此不详细阐述。
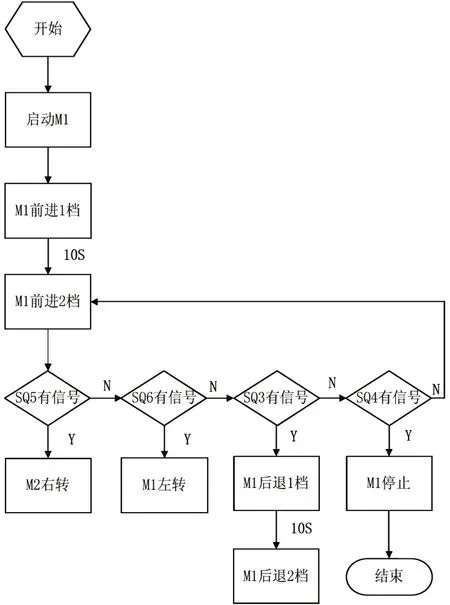
图3 无人船航行控制系统
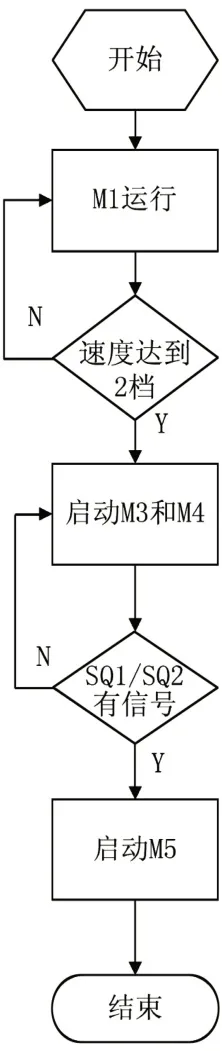
图4 曝气增氧控制系统

图5 微生物菌剂和碳纤维生态草投放控制系统
无人船航行控制系统中,当按下SB1时,驱动电机启动,接着按下SB2,无人船以低速航行,10S后将自动转为高速航行。在高速航行时,船身四周的超声波传感器实时检测周围有无障碍物,若有,将改变航行方向,根据需要启动舵机进行左转或右转。
曝气增氧控制系统中,在驱动电机运行到高速档时,同时启动左右电推杆到达指定位置,按照无人船航行轨迹进行曝气增氧。
微生物菌剂和碳纤维生态草投放控制系统中,在无人船航行时,按照航行轨迹定时定点投放微生物菌剂,当达到投放位置时,无人船停止运行,并开始投放微生物菌剂和碳纤维生态草,投放时间设置为3min,停止投放后,再按照轨迹继续航行,如此重复10次后无人船返航充电。
4.3 微生物菌剂的流量阀PID控制
无人船在航行过程中会根据其航行轨迹实时获取当地的水质情况,若水质变化不大,营养成分充足的情况下可以不用频繁的添加微生物菌剂[13-14]。但若是水质变化较大或者不稳定时,需要加大添加微生物菌剂的量。而且微生物的代谢产物有些是有毒性的,长时间积累也会抑制细菌的生长添加量也不能过大[15-16]。因此,无人船在进行微生物菌剂投放时,需要实时进行流量阀的调节。
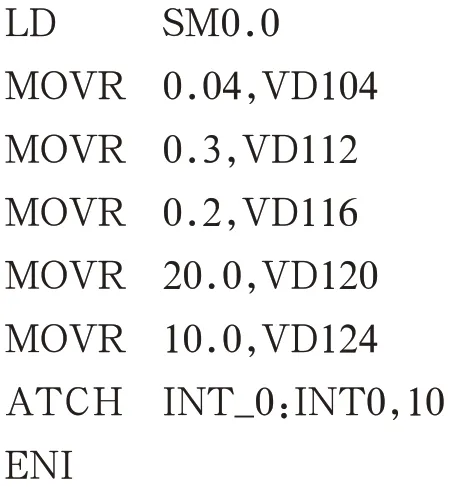
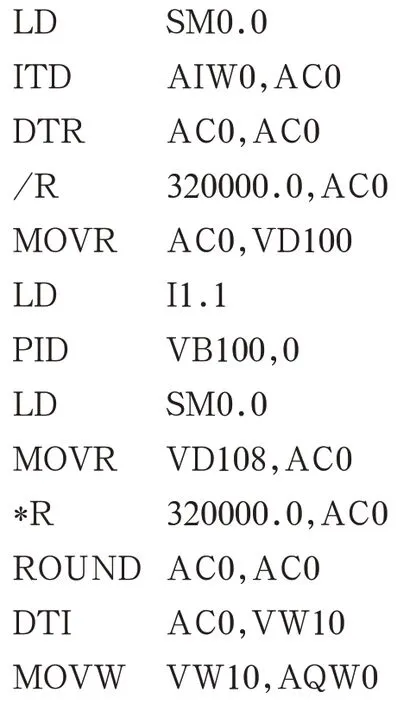
PID是比例、积分、微分运算的简称,用以维持微生物菌剂投放量的稳定。具体方法是首先利用COD传感器测得河道内COD 余量,再经过换算得到目前河道内微生物菌剂的含量。而河道内最佳的微生物菌剂含量在3%~4%之间,本文以4%为准,主要程序如下:
微生物菌剂投放量控制初始化子程序:
微生物菌剂投放量控制中断服务程序:
5 调试运行试验
采用MCGS 触摸屏人机交互界面,进行控制系统的调试。触摸屏总共分为4 个界面:无人船航行控制界面、曝气增氧控制界面、微生物菌剂和碳纤维生态草投放控制界面和数据显示界面。分别见图6~图9。

图6 无人船航行控制界面
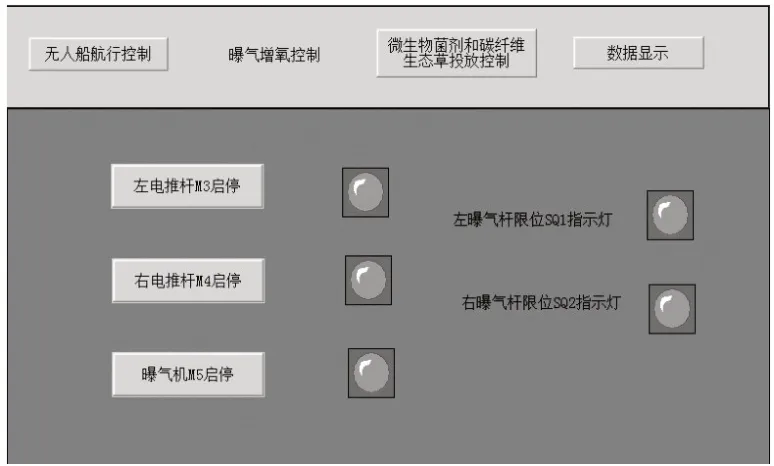
图7 曝气增氧控制界面
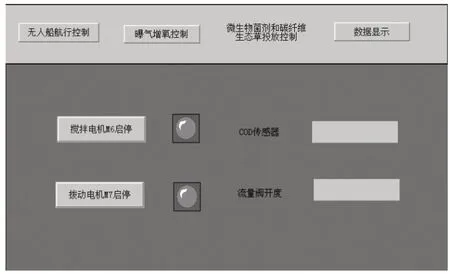
图8 微生物菌剂和碳纤维生态草投放控制界面
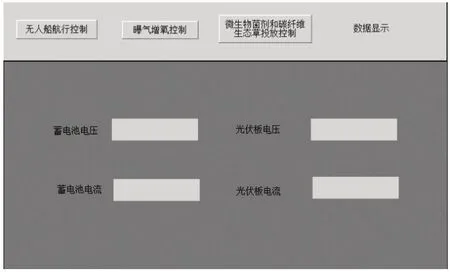
图9 数据显示界面
在无人船航行控制界面中,可以按下M1启停按钮一次,M1启动,M1右边的指示灯亮,代表M1的接触器KM1运行;若船身前方右障碍物,则SQ3 指示灯会亮,以此类推。在工作过程中若遇到紧急情况,可以按下急停按钮停止无人船的作业。
在微生物菌剂和碳纤维生态草投放控制界面中,可以实时获得COD传感器的数据和流量阀开度的数据。
在数据显示界面中,可以实时查看蓄电池和光伏板电压、电流数据。若发现电压、电流较低,不能供给无人船航行所需的电量,可以提前手动操作无人船回航查找故障原因,避免无人船因不够电量回航而停在河道中央。
6 结束语
本文设计了一种河道黑臭水体原位修复无人船控制系统,采用PLC作为主控制器完成无人船的自主航行、曝气增氧、微生物菌剂和碳纤维生态草的自动投放,采用蓄电池和光伏板作为电源,MCGS触摸屏作为人机交互界面。样机经过调试,表明整个控制系统稳定可靠,作业效率高,大大降低了工人工作强度。
猜你喜欢
云南农业科技(2022年4期)2022-08-02
建材发展导向(2022年1期)2022-03-08
农村科学实验(2021年31期)2021-12-25
渔业致富指南(2021年9期)2021-12-07
中国土壤与肥料(2021年5期)2021-12-02
农业开发与装备(2021年3期)2021-04-14
煤气与热力(2021年2期)2021-03-19
天津农林科技(2020年3期)2020-08-13
今日农业(2019年11期)2019-08-13
电子制作(2018年19期)2018-11-14