配电网无功补偿装置功率控制技术研究
2022-07-21 02:57肖艳红欧家祥李航峰
自动化技术与应用 2022年6期
肖艳红,欧家祥,黄 宇,李航峰,吕 飞
(1.贵州电网有限责任公司电力科学研究院,贵州 贵阳 550002;2.贵州黔驰信息股份有限公司,贵州 贵阳 550002)
1 引言
通过对相关数据的分析,发现配电网的无功功率约为有功功率的1.3倍。不同于无功功率的输送,在输送过程中会产生较大的功率损耗,降低功率的同时,还会产生较大的电压降,使配电网无法正常运行[1-2]。增加无功功率可以提高系统的视在功率,增加系统的电流。考虑到配电网中无功功率的负面影响,增加配电网的无功功率会产生一系列的负面影响,如降低系统的功率因数,造成较大的功率损耗,使原动机的效率相对较低等,针对无功补偿提出了方案。
配电网无功补偿的重要性和实际问题的解决已成为业界共识,各种无功补偿装置被广泛应用于电力系统中。文献[3]设计了一种基于瞬时无功控制的功率平衡优化算法及装置.选择瞬时对称分量法作为控制策略来实现实时补偿不平衡电流中的负序,零序电流,通过搭建仿真和实验平台验证控制策略的正确性,最后选取地区典型台区挂网运行。文献[4]设计了无功补偿装置功率部分的电路设计方案,实现了电能的定量输送。在分析电网电压和暂态负载电流瞬时值的基础上,提出了一种补偿控制算法。
然而,在配电网无功补偿装置运行过程中,难以实现配电网无功补偿与自身运行功率的协调控制。因此,在传统功率控制技术的基础上,提出并优化了配电网无功补偿装置的功率控制技术。
2 配电网无功补偿装置功率控制技术设计
2.1 配电网无功补偿装置的分析
配电网中无功补偿装置包括固定饱和电容器、同步调和机、饱和电抗器、机械投切电容器、静态无功补偿器、静态无功补偿器等,其中静态静态无功补偿器可分为晶闸管投切电容器、静态电容-晶闸管控制电抗器、混合静态无功补偿器三种。其中同步调相机是只输出无功功率的发电机,输出的无功功率QCS与电压U之间的关系为:

大多数设备安装在负荷中心附近。晶体管电容器实际上是一种动态吸收式感应无功补偿装置,每个电容器由晶体管控制[5]。电容器在接通期间,向系统注入的无功功率为:

式中C为电容器的电容,ω为设备的运行角速度。固定电容-晶闸管控制电抗器输出的无功输出为阶梯式可调,起粗大无功调节作用,设备在无功调节中起细调作用。这种补偿装置从配电网中吸收的无功功率为:

由公式2和公式3可以得出组成的静止无偿补偿器的无功功率为:

结合上述无功功率的计算与检测原理,确定无功补偿的基本工作模式以及补偿装置的结构[6]。以动态固定电容-晶闸管控制电抗器装置为例,其内部结构如图1所示。
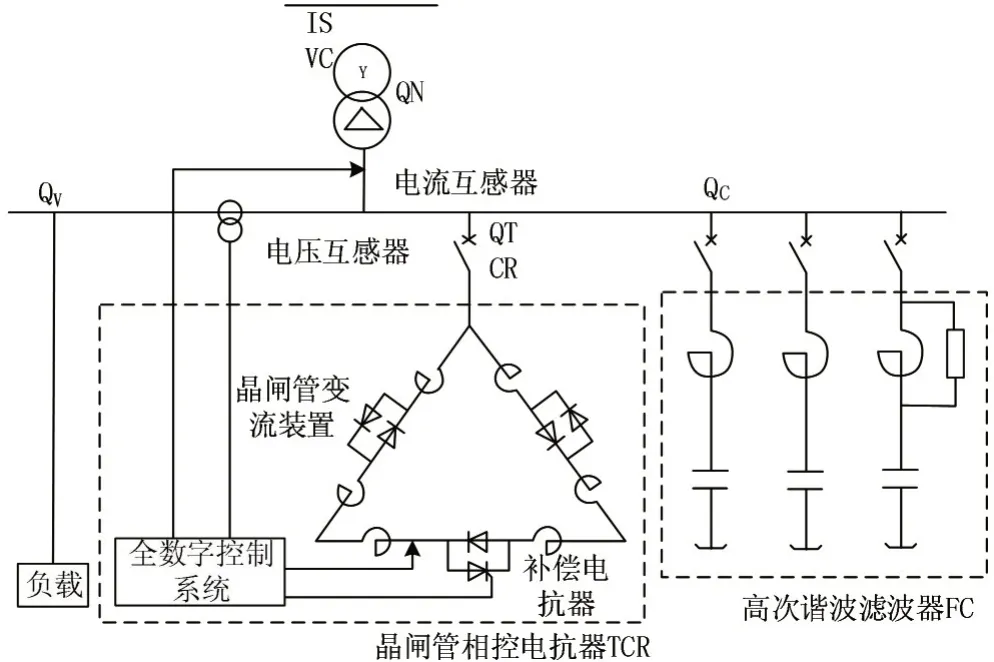
图1 动态固定电容-晶闸管控制电抗器结构图
如图1所示,动态无功补偿装置由主电路和控制系统组成。主电路包括多个机械开关和TCR 电路控制电容,电容器组向系统发送感应无功功率,TCR 吸收无功功率[7-8]。以TMS320FDSP 和STM32FARM 微机系统为核心,采用采样电路采集负载电流、电容器组侧电流和电网侧电压,结合需要的补偿量计算无功补偿容量,并根据所提出的控制方案计算,对制动器管片和电容器组进行等效电纳,根据电容器组的数量控制开关和制动器管片的触发角,达到控制目的。无功补偿装置的单相补偿的有电流平衡和稳态下无功功率方程:

式中而QL为TCR 吸收的感性无功,与晶闸管触发角角度相关[9],QLoad和QC分别为电容器组提供的感性和负载吸收的感性无功功率。通过改变QL和投入的电容器组数将系统发出的无功功率控制小范围内。加入在某一时段,△Q为到达整定功率因数所需要的无功功率,TCR属于消耗功率,无功缺额公式为:

控制晶闸管触发角使TCR 所产生的无功为QC-△q 可以使功率因数达到目标值[10]。
2.2 确定无功功率控制标准参考值
根据无功功率的电压情况,结合Q(U)方法得出其分段函数,将采集无功补偿装置的电压情况带到分段函数,得出相对的无功功率给定值。具体的计算过程如公式7所示。
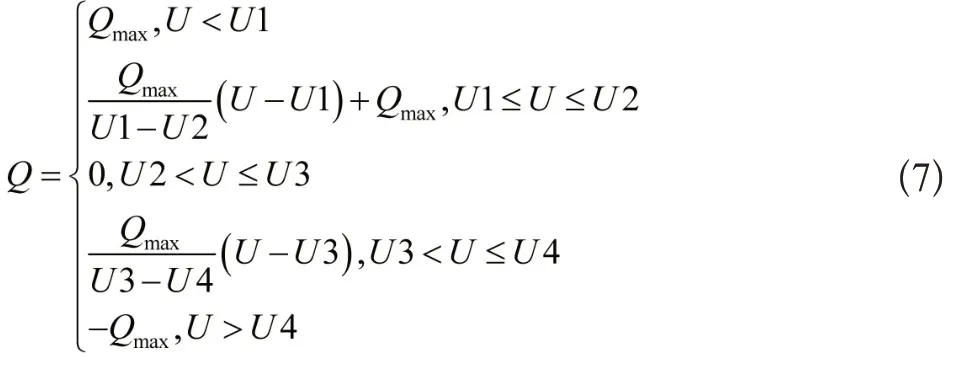
上式中Qmax为补偿装置的无功输出最大值,Ui为电压标幺值。
2.3 监测无功补偿装置运行状态
利用无功补偿装置对正常工况和非正常工况下的变工况运行特性进行匹配,根据挖掘出的不同功率因数的历史数据进行分析,并对不同运行工况下的高斯混合模型进行聚类分析,配电网作业特征包括连续增加、相位降低、变化规律等,设备运行特征识别设备运行状态,包括正常、故障或未切除、局部故障、工作不稳定、不适当、补偿过大、装置容量不足等,由此形成相应设备状态库的不同运行特性。一般来讲无功补偿装置的运行状态如图2所示。
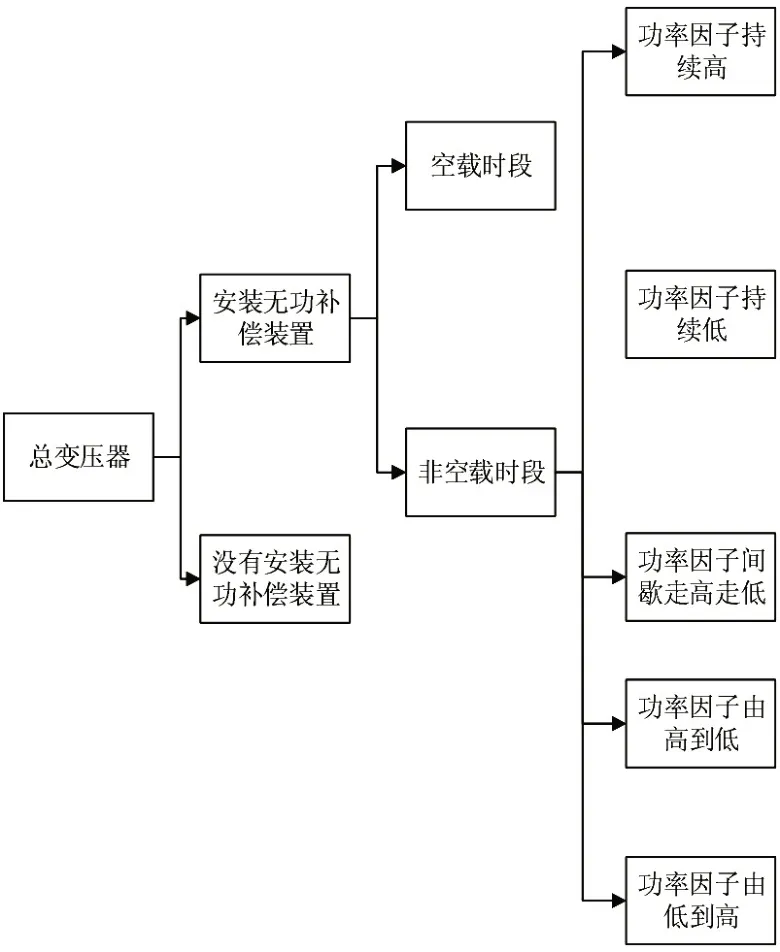
图2 无功补偿装置的运行类别
结合图2,决定装置能否正常状态运行。功率因数是衡量无功补偿装置运行状态的重要指标。通过对低压下功率因数识别方法的分析,研究了无功补偿装置的状态识别问题。通过对各站的运行数据、部分用户侧电压监测数据和用户低压相关工单数据的分析,提取出功率因数和电压的数据特征,并根据皮尔逊相关系数,找出高功率因数和电压相关的台区。其中皮尔逊相关系数的计算方式如下:

式中E()为相关性测度函数,X 和Y 分别为度量的两个变量,在此次计算过程中X和Y分别对应的是功率因素和电压值。采用梯度提升树等基于电压和功率因数特征的分类机器学习模型,运用大数据分析方法对模型进行了正确性和合理性验证。其中提升树模型可以看作是决策树的加法模型:

其中T()表示决策树,M为树的个数,Θ表示决策树的参数。提升树算法采用前向分部算法。首先确定f0(x)=0,第m步的模型是:

对决策树的参数Θ的确定采用经验风险最小化来确定:

为了验证模型的正确性,建立最终的功率因数和低压辨识模型,在既有区域内采集安装终端数据的电站用户,可以将实时监测的无功补偿装置的相关参数代入上述公式中确定设备的当前工作状态和功率输出。
2.4 安装功率控制器
安装功率控制器的基本硬件结构如图3所示。
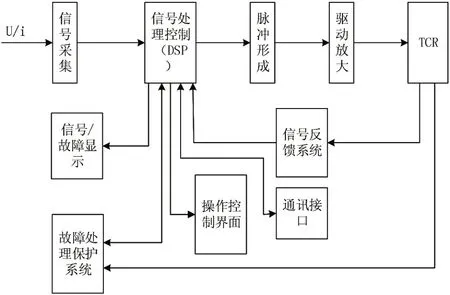
图3 功率控制器结构框图
从图3 中可以看出,该控制器包括过程控制、晶闸管触发脉冲的形成与驱动、保护、显示、通信等模块。其中,信号采集电路主要实现三相电压,将补偿装置的电流换作电压信号,再经过低通滤波器、抗混叠滤波器和隔离放大器的处理,最终转换为适合A/D芯片允许输入范围的电压。信号处理控制部分完成对采集信号的处理,最终得到TCR 支路的动态补偿电纳,并将其转换为相应的触发控制角。晶闸管触发器主要完成触发脉冲信号的形成、驱动放大、隔离、获得晶闸管。将配电网无功补偿功率和当前运行功率作为输入项输入到控制器中,通过控制器的运行和功率调度得到最终控制装置的功率。
2.5 计算功率控制量
分别计算无功补偿装置的瞬时功率和补偿容量,将最终的补偿结果与无功功率控制标准参考值作比较,从而计算功率的控制量。瞬时功率的计算公式为:

其中v和i分别为配电网的瞬时电压矢量和侧电流矢量,而p 和jq 分别为电压和电流的标量积和矢量积。cos φ1为补偿前的平均功率因数,cos φ2为设补偿后的功率因数,Pmax为全部用电设备的用电情况计算出总平均功率和,结合改善功率因数,则需要的补偿容量为:

上式中的计算结果为无功补偿设备向系统输出的无功功率,β 为负载的月平均负载率,而φ1和φ2分别为无功补偿前后的负载功率因数角。判断当前补偿容量下的瞬时功率,并与实际的瞬时功率进行比较,得出两者之间的差值,将差值计算结果与确定的参考值作比较,若差值大于参考值则需要将功率向减少的方向控制,否则需要向反方向进行功率控制。
2.6 实现无功补偿装置功率控制
分别将控制量、无功补偿装置的当前运行功率值代入到控制器中,通过对配电网电流和电压的控制,从而实现对实时补偿功率的控制。通过检测电路实时检测无功补偿装置的输出功率,根据输出功率相对于补偿容量的差值以及配电网采取何种组合与系统并联功率和波动类型判断超级电容。若补偿容量与瞬时功率的差值小于设定阙值,则超级电容和驱动装置均不与直流母线接通。若差值大于设定阙值且为常规功率波动时,接通蓄电池或同时接通超级电容和无功补偿驱动装置。
3 控制效果实验分析
为了验证设计的配电网无功补偿装置功率控制技术的控制效果,设计控制效果测试实验。为了降低此次实验对实际配电网工作的影响,选择配电网中的某一个网络分支作为实验的运行环境。实验选择的配电网样本运行环境如图4所示。
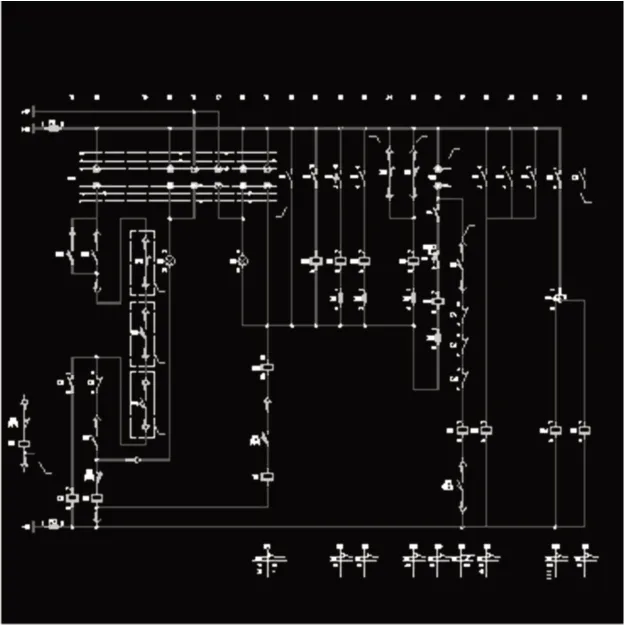
图4 配电网样本电路图
配电网节点0,1,接入有载调压变压器,调压范围[0.95,1.05],可调8 档,调整步长为0.0125;节点30 接补偿电容器组,调整步长为50kvar,调节范围为0~300kvar。节点10接入静态无功补偿装置,无功补偿间隔为0~500kvar。节点17 与蓄电池相连,蓄电池容量为1000kw h,充放电效率为95%,最大充放电功率为200kw,初始容量为500kw h。
在实际的无功补偿装置运行过程中,常会出现持续过补、阶跃上升以及阶跃下降的功率输出情况,为了观察功率控制技术在不同的装置运行情况下的控制效果,分别设置两种不同的运行环境,对应的无功补偿装置的功率输出曲线如图5所示。
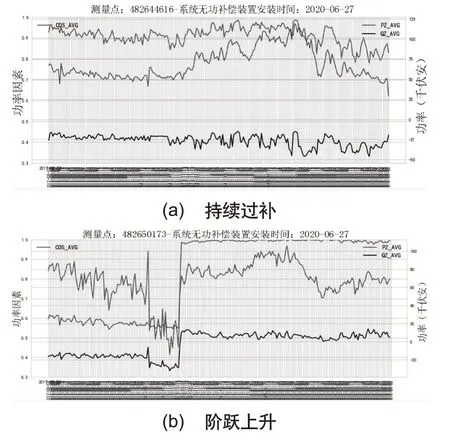
图5 无功补偿装置功率变化曲线
为了形成实验对比,除了设计的功率控制技术外,还设置了传统的文献[3]技术以及文献[4]技术作为此次实验的两种对比技术。在实验环境下,分别将三种技术应用其中,设置无功补偿装置的控制目标,对比在不同的控制技术下功率数据与目标数据之间的误差,从而对比控制效果。经过相关数据的统计与对比得出实验结果如表1所示。
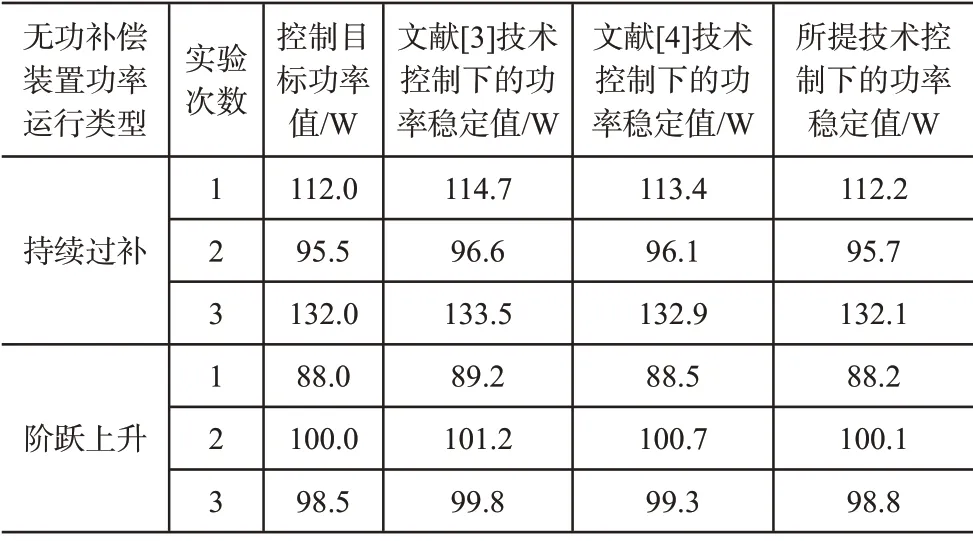
表1 控制效果测试结果
从表1 中可以看出,以控制目标功率为基准,文献[3]技术和文献[4]技术下得出配电网无功补偿装置的功率稳定值的平均偏差分别为1.5W和0.82W,而所提技术下其功率稳定值的平均控制偏差为0.18W。由此可见,综合多次控制实验结果,应用设计的控制技术得出的功率运行结果更加接近目标值,因此设计的控制效果更优。
4 结束语
对配电网络中无功补偿装置的不断研究,实现了从电能传输过程到电器消耗、再到有效利用的过程。采用无功补偿装置可以最大限度地提高配电网络及其设备的运行效率,并能带来较高的经济效益。而通过无功补偿装置功率控制技术的设计与应用,实现补偿功率与装置运行功率的同时控制,并解决了传统控制方法中存在的控制偏差问题,因此在实际的电力系统中具有较高的应用价值。
猜你喜欢
现代信息科技(2022年20期)2022-11-17
电气传动自动化(2022年1期)2022-03-24
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
舰船电子工程(2019年11期)2019-11-28
西部论丛(2018年12期)2018-11-28
电子制作(2018年16期)2018-09-26
新高考·高一物理(2017年7期)2018-03-06
电子制作(2017年22期)2017-02-02
中学生数理化·高二版(2016年10期)2016-12-24