高速公路平纵曲线组合路段交通风险评估方法*
2022-07-20 01:43胡立伟张成杰赵雪亭吕一帆
交通信息与安全 2022年3期
胡立伟 张成杰 赵雪亭 刘 凡 吕一帆 薛 宇
(昆明理工大学交通工程学院 昆明 650500)
0 引 言
平纵曲线组合路段(combined horizontal and vertical curves,CHVC)不仅兼具了平曲线和竖曲线单一要素的特点,还具备了二者结合后产生的新特点,是公路行车安全的瓶颈路段。相关统计表明,约15%的交通事故发生在CHVC[1]。因此,对CHVC的交通安全特性进行研究,可以有效提高该路段的行车安全性。
近年来,国内外学者深入探究人、车、路及环境与交通风险之间的关系,但多数是集中于其中某一方面展开研究。胡立伟等[2]通过构建高原地质及不良气象环境下的交通风险致因耦合模型,对危险程度进行量化,分析出公路交通风险值与各风险因素的关联性。Aliaksei 等[3]基于驾驶行为数据建立了1种评估交通风险等级的框架模型。张存保等[4]分析雾天高速公路交通事故数据得出雾天会增加交通风险。孔令铮[5]从人的角度出发研究了高速公路发生交通事故的原因,指出新驾驶员和疲劳驾驶等人为因素是影响交通风险的主要原因。温惠英等[6]将风险要素与脆弱性结合,构建了1 种多因素风险综合分析模型,对山区公路的交通风险进行了量化。Abdel-Aty等[7]基于道路交通事故数据分析了雾天不良天气对交通风险的影响。Penmetsa 等[8]通过分析道路线形与事故严重程度的关系,构建出影响度模型并通过调整模型参数提出改善措施。上述研究均可为CHVC 的交通风险评估指标选取提供理论依据,但对于CHVC 来说,因不同路段的特征存在显著差异,故已有影响交通风险的评估指标并不能直接应用于CHVC,应结合路段实际特征,从驾驶员、道路、交通环境及其他因素的角度出发综合考虑选取交通风险评估指标,构建1 个更全面的交通风险评估指标体系。
此外,国内外学者对CHVC 的研究已从多个角度展开。戢晓峰等[1]通过分析CHVC 事故严重程度致因及影响价值,构建平纵曲线组合路段事故严重程度致因辨识的2 阶段模型。得出7 个对交通事故有正效应和3 个对交通事故有负效应的影响因素。Moreno等[9]基于平均行驶速度和行驶时间百分比展开研究,分析了以曲率变化率为特征的公路水平线形以及以梯度变化率为特征的公路纵面线形与交通安全之间的关系。丰明洁等[10]利用驾驶模拟器模拟了不同的高速公路驾驶场景,研究了不同线形指标与横向加速度的关系,并将CHVC 的安全性划分为“GOOD”“FAIR”“POOR”这3 个等级。高建平等[11]基于驾驶员动态视觉参数变化规律,为长大连续下坡路段纵坡组合及CHVC 提出了设计方法。岳雷等[12]以车辆稳定性分析为基础,建立了长下坡路段、急弯路段以弯坡组合路段的车辆行驶安全模型。陈亦新等[13]从道路线形的角度出发,探究了CHVC 与相邻路段线形对车道偏离的影响。上述研究多数是从单一方面的角度考虑对CHVC 交通风险的影响,较少会综合考虑各方面对CHVC 交通风险的影响,且综合考虑各方面因素的相关研究基础较为薄弱。
传统的评估方法常因评估过程中无法兼顾部分指标边界模糊性而导致部分信息缺失的问题[14]。因此,笔者综合考虑各方面因素的影响,从驾驶员、道路、交通环境,以及其他因素的角度出发,构建了更为全面的风险评估指标体系,利用可拓云风险评估模型,将定性指标的边界模糊性考虑在内,完成定性指标的定量化,解决传统评估方法存在的不足,为综合评估CHVC 交通风险提供1 种方法。以云南省3条高速公路路段为例进行研究,验证该模型在风险评估中的适用性。
1 研究构架
目前主要通过主、客观赋权法确定指标权重。主观赋权法依据实践经验赋予评估指标权重,一般比较切合实际,但存在主观随意性的问题。客观赋权法对评估指标进行定量分析,结论客观准确,但忽略了决策者对不同指标的重视程度。因此,为了使评估结果更具科学性和准确性,本文利用理想点法将层次分析法(analytic hierarchy process,AHP)和熵权法(entropy weight method,EWM)确定的权重相结合,弥补单一赋权方法存在的不足,最后通过理想点法确定评估指标的组合权重。
本文将组合赋权法和可拓云模型相结合,最终得出CHVC交通风险评估结果。评估流程图见图1,具体步骤如下。
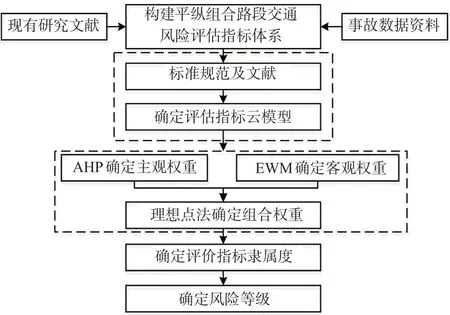
图1 CHVC交通风险评估流程Fig.1 Traffic risk assessment process for CHVC
步骤1。基于现有对CHVC 的研究成果及相关交通事故数据建立风险评估指标体系,并参照相关规范和文献完成对评估指标的等级划分。
步骤2。确定评估指标正态云模型。计算正态云模型期望值Ex,熵值En及超熵He。
步骤3。利用AHP、EWM 分别确定主、客观权重,再运用理想点法求得组合权重。
步骤4。确定各评估指标风险等级隶属度。将各风险评估指标参数代入可拓云模型,运用Matlab计算并输出各评估指标的风险等级隶属度及风险等级云图。
步骤5。确定CHVC 风险等级。将组合权重与隶属度相乘计算出综合评判向量B,依据最大隶属度原则确定最终风险等级。
2 风险评估模型与方法
2.1 构建风险评估指标体系
考虑到多种因素对CHVC 交通风险的影响,参考已有文献资料[15-16]和事故数据,从驾驶员、道路、交通环境,以及其他因素4 个方面构建的风险评估指标体系,见图2。
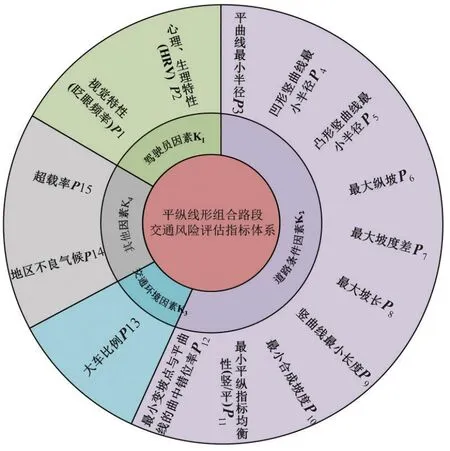
图2 CHVC交通风险评估指标体系Fig.2 Traffic risk assessment indicators system for CHVC
相关研究表明:眨眼次数与驾驶人视疲劳程度存在相应关系,一定程度上,眨眼次数越少,驾驶人注意力越集中,越容易产生视疲劳[17]。因此,本文选用眨眼频率作为视觉特性的评估指标。
心率指标能够反映出驾驶人的心理负荷和情绪波动状况。经研究发现驾驶人的心率变异性(HRV)指标测试方便且可信度高,能够直观地反映驾驶人的心理、生理状态变化[18]。因此,本文选择心率变异性作为驾驶人的心理、生理特性的评估指标。
2.2 评估指标风险等级划分依据
依据路线设计标准规范中对相关评估指标的要求,参考国内学者对各评估指标的等级划分研究[15-16],对CHVC 风险评估指标进行分级,划分依据见表1。
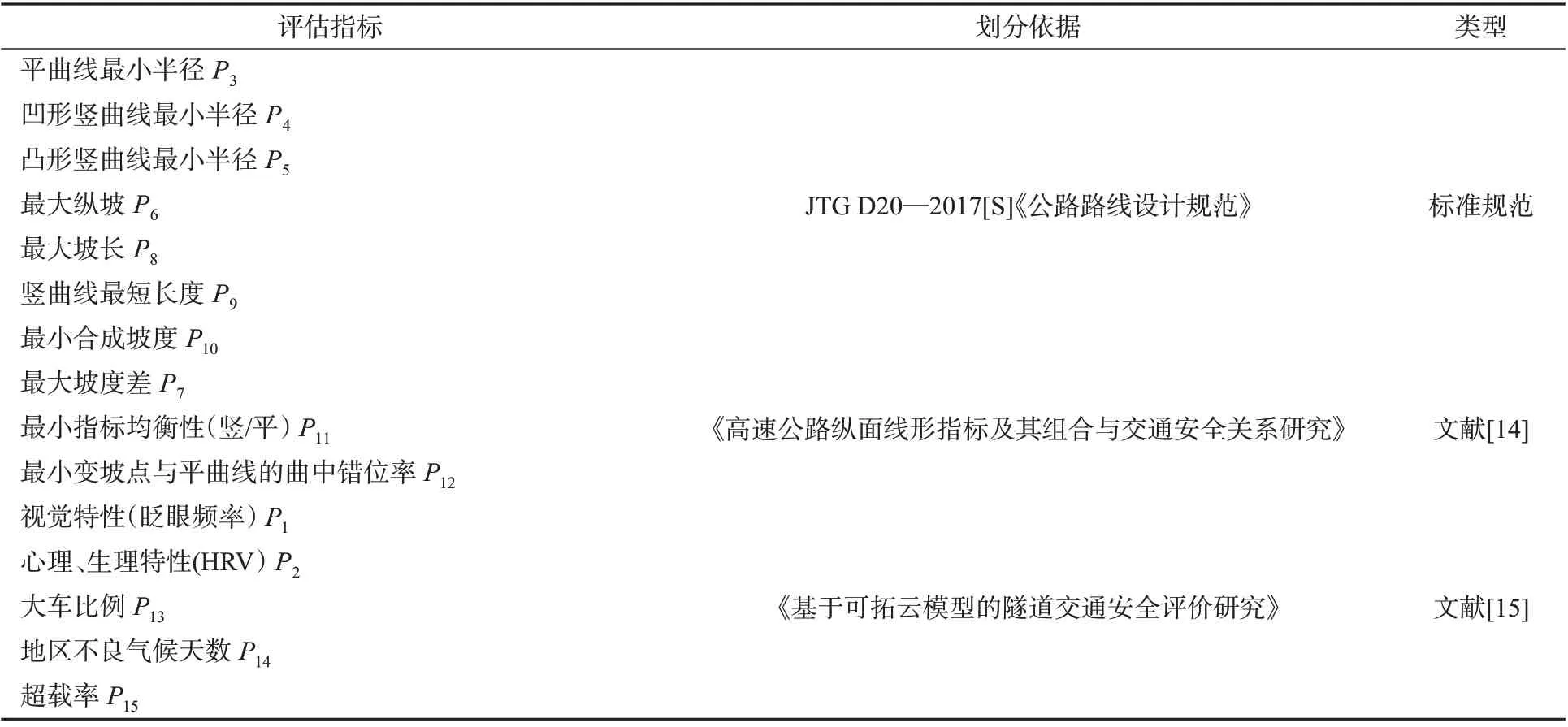
表1 各评估指标风险等级划分依据Tab.1 Basis for the classification of risk levels of each assessment indicator
2.3 可拓云风险评估模型
2.3.1 可拓云理论
可拓理论用事物名称N,事物特征C,事物特征值V来描述事物的基本元,记物元R=(N,C,V)。正态云模型用(Ex,En,He)3个特征值来表示:期望值Ex表示云滴对应于隶属云的中心值,反映属性概念的点值;熵En是对属性概念不确定性的度量,反映属性概念数值范围;超熵He是对熵En不确定性的度量,反映云滴离散程度。
可拓云模型利用正态云模型的(Ex,En,He)取代可拓理论中的事物特征值V,实现评估过程中对不确定性和模糊性的定量描述,见式(1)。

式中:R为风险评估指标划分的等级;N为待评估路段;Ci为风险评估指标;(Ex,En,He)是对Ci的正态云描述。
2.3.2 标准正态云模型
参照已有文献[16]将CHVC风险水平由低到高划分为A级、B级、C级、D级和E级这5个等级,各等级分数分别为[80,100],[60,80),[40,60),[20,40),[0,20)。因部分指标等级界限划分存在模糊性,为定量评估指标风险等级,将其值域转化为百分制,各指标等级界限划分见表2。

表2 风险评估指标等级界限划分Tab.2 Classification of risk assessment indicators levels
对风险等级值域进行双约束空间处理[Jmin,Jmax],计算出正态云模型的3 个特征值,见式(2)~(4)。

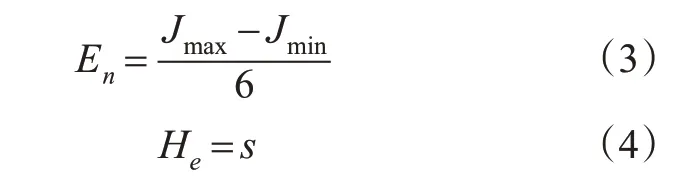
式中:Jmin,Jmax为等级划分边界值;s为常数,可根据评估指标的模糊阀度进行相应调整。通过查阅相关文献[19-20],本文取s=En/10。利用上述方法得出各风险评估指标的标准正态云模型,见表3;这里仅给出视觉特性标准云图,见图3。

图3 视觉特性标准云图Fig.3 Standard cloud map of visual characteristics
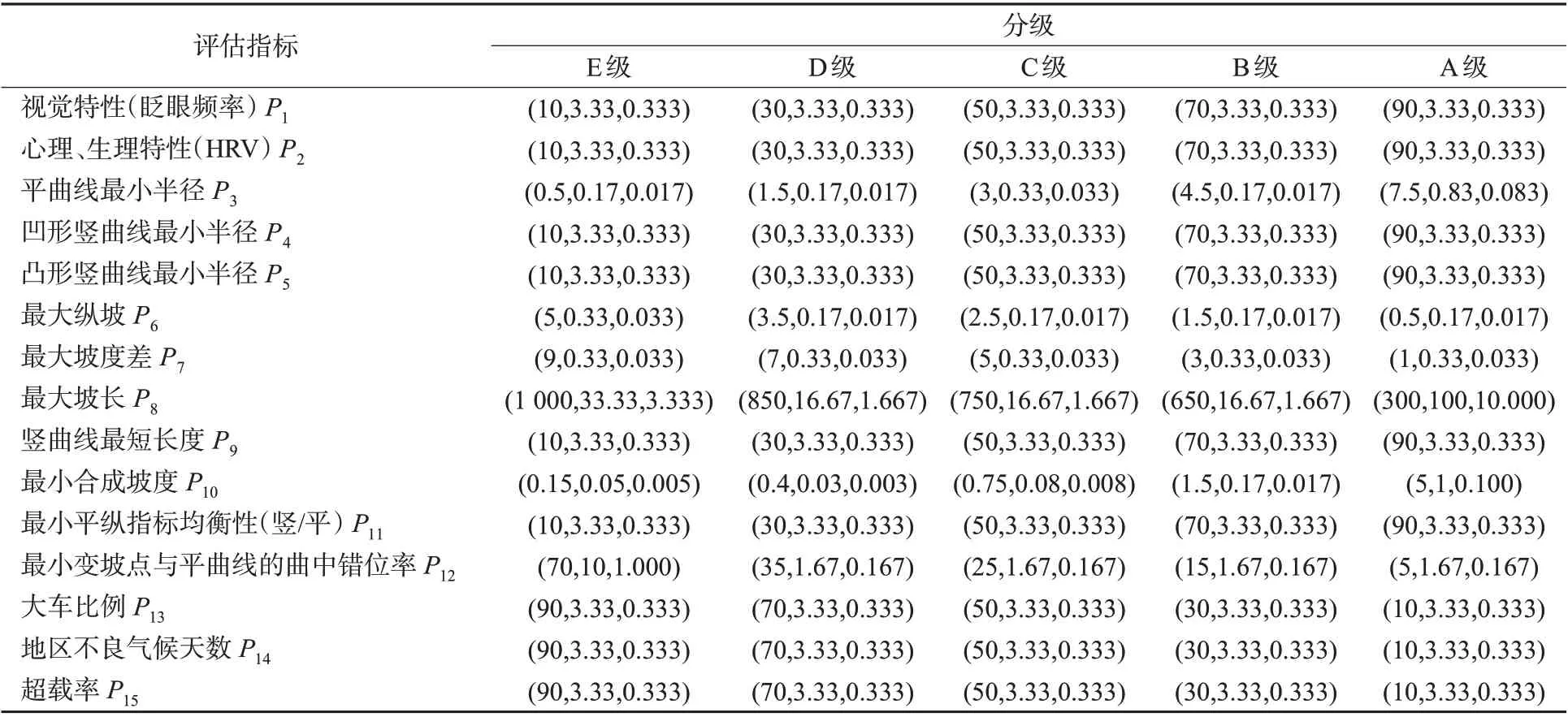
表3 标准正态云模型Tab.3 Standard normal cloud model
2.4 评估指标权重计算
考虑到单一赋权方法存在的不足,本文采用AHP 确定主观权重,EWM确定客观权重,再通过理想点法对2种权重进行组合确定最终权重。
2.4.1 确定客观权重
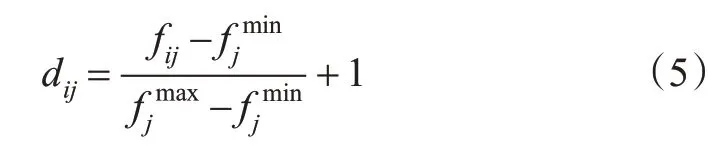
确定客观权重的过程见式(5)~(10)。
正向指标标准化
逆向指标标准化

式中:dij为指标标准化后的值;fij为第i个对象的第j个评估指标值;为第j个评估指标等级区间划分的最大值;为第j个评估指标等级区间划分的最小值。
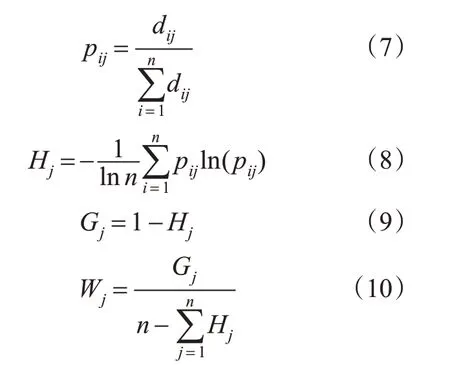
式中:pij为对象i的第j个评估指标在整个评估系统中的占比;Hj为评估指标j的熵值;Gj为评估指标j的信息效用值;Wj为各评估指标的客观权重。
2.4.2 理想点法确定组合权重
常见的组合赋权方法有乘法归一化、线性加权法等方法,但乘法归一化法适用于指标间权重分配均匀的情况,线性加权法中参数选取具有一定主观性。因此,为权衡主、客观因素对指标权重的影响,本文采用理想点法进行组合赋权。理想点法的基本思想是[21]尽可能缩减向量目标函数与所考虑的问题之间的偏差,缩小主、客观权重与理想点间的差异,计算见式(11)~(12)。
式中:wj为第j个评估指标的主观权重;Wj为第j个评估指标的客观权重;kj为未经过归一化处理的组合权重;Kj为归一化处理后的最终权重。以上各式中i,j=1,2,…,n。
2.5 确定可拓云模型云隶属度
2.5.1 隶属度计算
各评估指标与风险等级之间的隶属度ρ计算方法见式(13)。
式中:x为某评估指标值;En'为服从正态分布的随机数。
2.5.2 隶属度评判矩阵
由式(13)的计算结果构成隶属度评判矩阵Z,见式(14)。
式中:ρij为评估指标Ci与风险等级j之间的隶属度;i=1,2,…,n;n为评估指标数;j=1,2,3,4,5,对应5个不同的风险等级。
2.6 确定风险评估等级
2.6.1 计算综合评判向量B
依据最大隶属度原则确定最终风险等级,见式(15)。

式中:K为组合权重向量;Z为隶属度评判矩阵。
2.6.2 评估结果检验
1)计算综合评判模糊等级特征值r,见式(16)。
式中:bi为向量B对应的分量;fi为分量对应的等级取值,风险等级A~E级依次取值为5,4,3,2,1。
2)因式(13)在求解过程中存在随机性,故需多次求解以降低随机性对结果产生的影响。综合评判模糊等级特征值r的期望值Exr和熵值Enr的计算见式(17)~(18)。
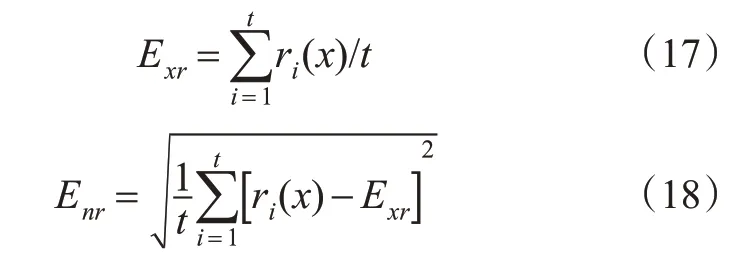
式中:ri为第i次计算得到的综合评判模糊等级特征值,t为运算次数,本文取值为1 000。
3)应用置信度因子θ定量检验评估结果的可信度,见式(19)。θ值越大表示可信度越低;反之可信度越高。

3 数据采集及处理
3.1 试验路段
本文将云南省境内的汕昆高速(阳宗收费站—草甸收费站)、杭瑞高速(彩云收费站—恐龙谷收费站)及杭瑞高速(旧县收费站—马龙收费站)3条路段作为试验路段,各路段均包含丰富的平纵曲线组合形式。各路段概况见表4。
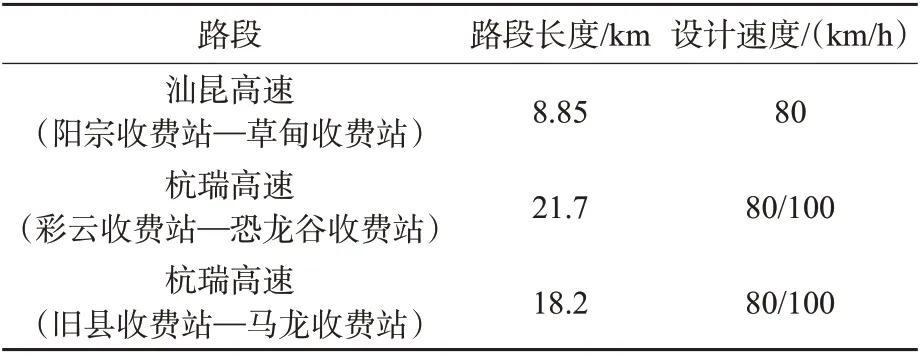
表4 试验路段概况Tab.4 Overview of test section
3.2 基础数据来源
为评估CHVC交通风险,需获取驾驶员、道路线形、交通流及其他方面的数据。驾驶员相关数据由实车试验获取;道路线形及超载数据由云南省相关交通管理部门提供;交通流数据经征得当地交通管理部门许可后由5名研究人员在试验路段利用Axle-Light RLU/3路侧激光技术交通调查仪实地采集;天气数据由研究人员对各路段近6个月的天气数据进行统计整理获取。
3.3 试验设计
为采集相关数据,组织相关人员开展实车试验。考虑到试验路段复杂的地理环境和试验开展的难度,试验共招募5 名性别、年龄,以及驾龄不同的驾驶员(其中男性3名,女性2名,平均年龄32周岁,驾龄均在3 年以上)。为确保试验数据的有效性及可靠性,要求被试驾驶员在试验开展前保证充足睡眠,保证试验当天各项生理状况良好。
为确保试验数据的普适性,试验选取别克君威2012款作为试验车。为减少其他因素对试验结果的影响,将采集时间选定为天气晴朗的工作日,试验时间为2021年7月12日—14日,7月12日沿阳宗收费站—草甸收费站开展试验,7 月13 日沿彩云收费站—恐龙谷收费站开展试验,7 月14 日沿旧县收费站—马龙收费站开展试验,试验过程中每位驾驶员沿各路段往返行驶2趟。
3.4 数据采集
试验过程中,驾驶员自由驾驶,将iView XTM HED4 眼动仪的采集频率设置为200 Hz/s 记录驾驶员的眨眼频率;利用Biofeedback2 000 X-pert型生物反馈仪记录并输出驾驶员的心率变异性LF值;利用AxleLight RLU/3 路侧激光技术交通调查仪在各路段完成6 h交通流数据的采集。
3.5 数据处理及分析
在数据处理前先剔除受主、客观因素影响生成的异常数据,将处理后的数据分别按桩号和时间进行分组。按桩号分组时,基于该路段事故资料筛选出事故多发路段,将各路段按同质法划分为9 种线形单元(见表5),对照行车记录仪和道路线形资料,确定通过各线形单元的时间,进而提取通过各组合形式的眨眼频率数据资料;按时间分组时,每间隔30 s提取1组心率变异性LF值数据,将其均值作为该时段的平均值,进而提取心率变异性数据资料。
1)眨眼频率。各路段不同平纵曲线组合形式下的眨眼频率变化见图4。Y 路段缓和曲线2 种组合形式下的平均眨眼频率最高(3.1次/10 s),为直线2 种组合形式的1.30 倍,为圆曲线2 种组合形式的1.46倍;C路段缓和曲线2种组合形式下的平均眨眼频率最高(2.91次/10 s),分别为直线和圆曲线2种组合形式的1.32倍和1.49倍;Y路段缓和曲线2种组合形式下的平均眨眼频率最高(2.71 次/10 s),分别为直线和圆曲线2 种组合形式的1.29 倍和1.37 倍;发现圆曲线组合形式下的眨眼频率低于其他组合形式,说明驾驶人行驶在圆曲线组合形式的路段时,精神负荷相对其他组合形式较大;通过对比各路段不同组合形式下的均值,从眨眼频率的角度反映出各组合形式的安全性排序为:缓和曲线和直坡>缓和曲线和竖曲线>直线和直坡>直线和竖曲线>圆曲线和竖曲线>圆曲线和直坡。
2)心率变异性。对5 名被试驾驶员进行编号,基本信息见表6,各驾驶员在不同路段的LF值变化见图5。
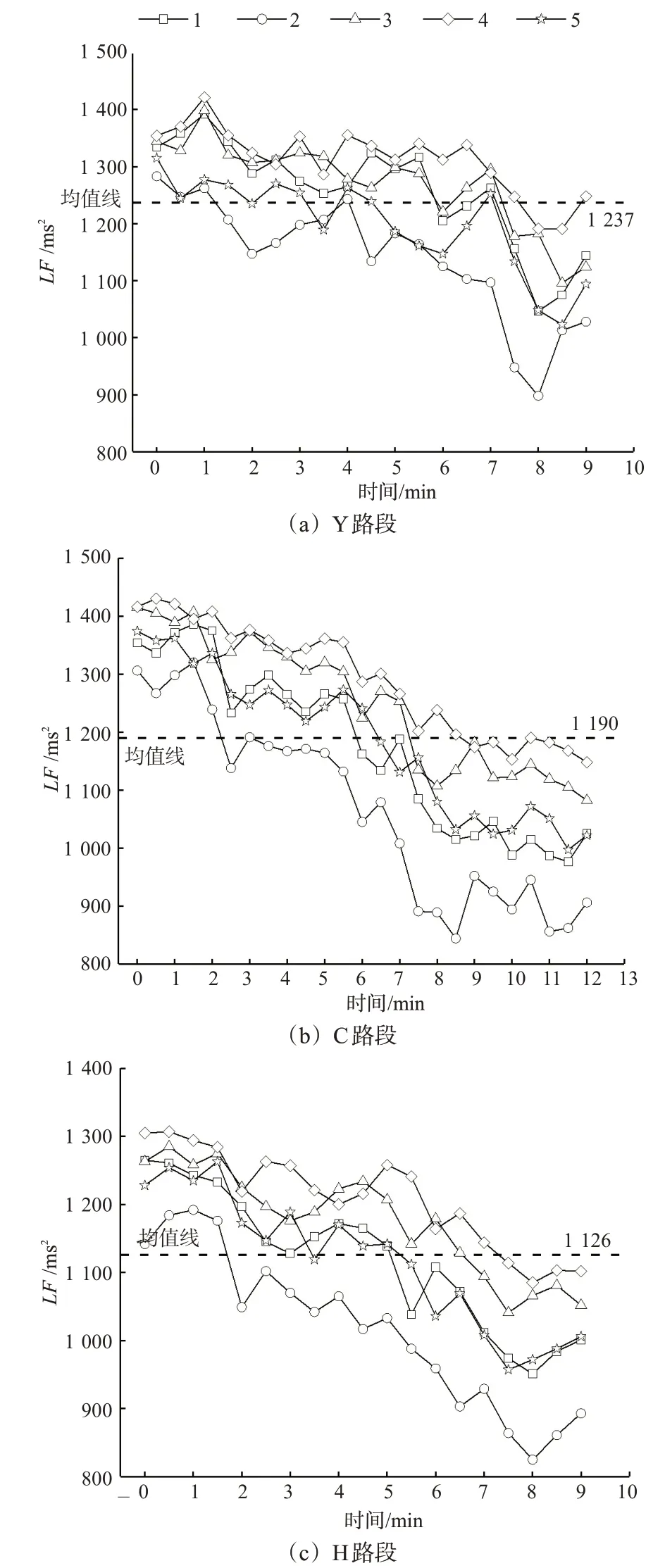
图5 不同驾驶员心率变异性变化图Fig.5 Variation chart of heart rate variability among different drivers
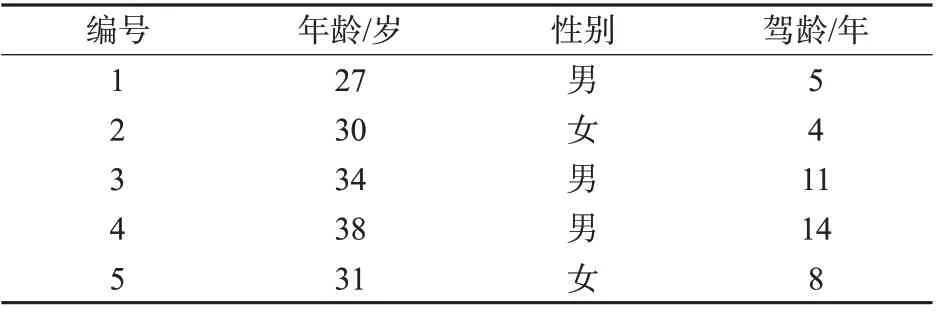
表6 驾驶员信息Tab.6 Driver information
LF值的下降反映出驾驶员的压力和紧张程度增加,LF值越低精神负荷越高[22-23]。对比分析各路段每位驾驶员LF值变化,驾龄10 年以上的在Y 路段LF值标准差平均值为66.60 ms2,驾龄小于10 年的标准差平均值为91.00 ms2;C 路段驾龄10 年以上的LF标准差平均值为87.75 ms2,驾龄小于10 年的LF标准差平均值为112.20 ms2;H 路段驾龄10 年以上的LF标准差平均值为73.36 ms2,驾龄小于10 年的LF标准差平均值为102.30 ms2。驾龄在10 年以上的驾驶员在各路段的LF值标准差平均值均比其他驾驶员小,说明相同路况下,驾龄长的驾驶员比驾龄短的驾驶员LF值变化幅度小,精神负荷更稳定。此外,通过对比各路段LF平均值,发现H路段平均值最小,表明驾驶员在该路段的精神负荷最高。
4 应用研究
4.1 研究路段概况
本文将汕昆高速(阳宗收费站—草甸收费站)中的阳宗坡路段(Y路段)、杭瑞高速(彩云收费站—恐龙谷收费站)中的彩云路段(C路段)和杭瑞高速(旧县收费站—马龙收费站)中的红军哨路段(H 路段)作为研究路段,对其进行风险评估,各路段基本情况见表7。
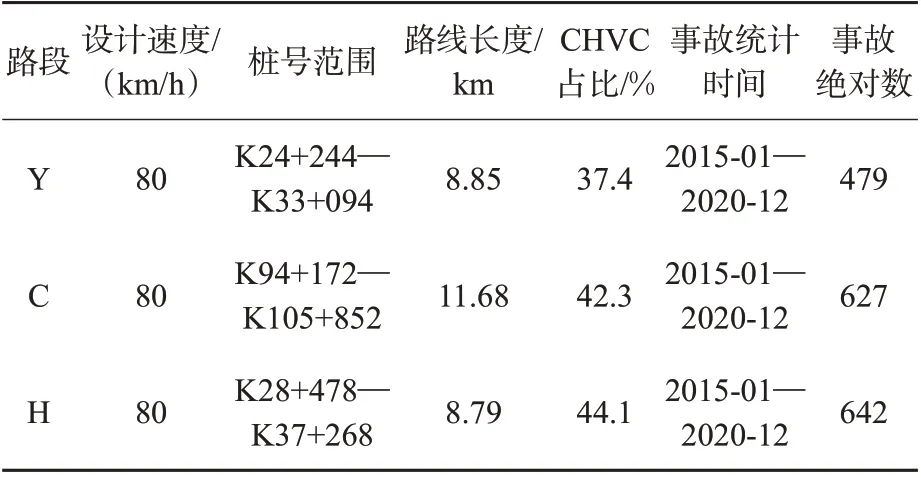
表7 路段概况及相关数据Tab.7 Road profile and related data
基于各路段试验采集结果,将各路段按同质法完成划分后,提取平直路段单元眨眼频率,并以其均值2.63次/10 s为基准(100分),对各路段的眨眼频率进行测算并量化。
HRV 频域分析指标中的低频值(LF)可以较好的反映个体的负荷程度,且LF与负荷程度成反比关系。利用LF值表征驾驶人应激状态下的HRV。LF正常范围为(1 170±416)ms2,本文以1 586 ms2为基准(100分),对各路段的HRV进行测算并量化。
此外,文中将乘坐人数≥20人(含驾驶员)或车身长度≥6 m 的大型客车以及车身长度≥6 m 或总质量≥45 000 kg的重型、中型货车归纳为大车。地区不良气候包括大雾、大风、暴雨及大雪等。
研究路段道路线形参数及其他指标取值见表8。
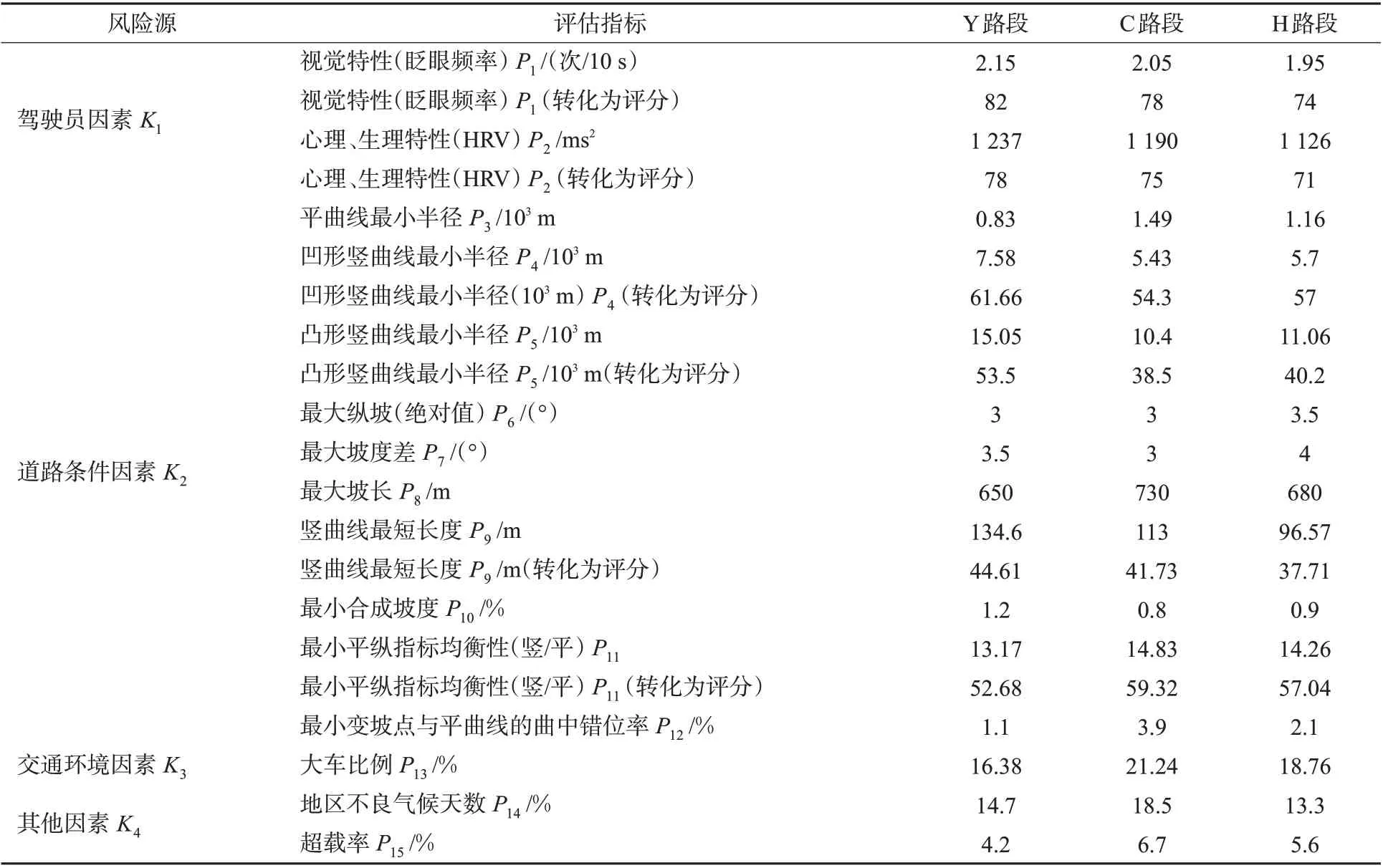
表8 各路段评估指标值Tab.8 Assessment indicators value of each road section
4.2 确定评估指标权重
选择10 名道路交通安全方面的专家对风险评估指标风险程度进行量化处理,专家的可信度从职称、学位、工龄和经历这4 个方面综合评判,具体评判标准见表9。
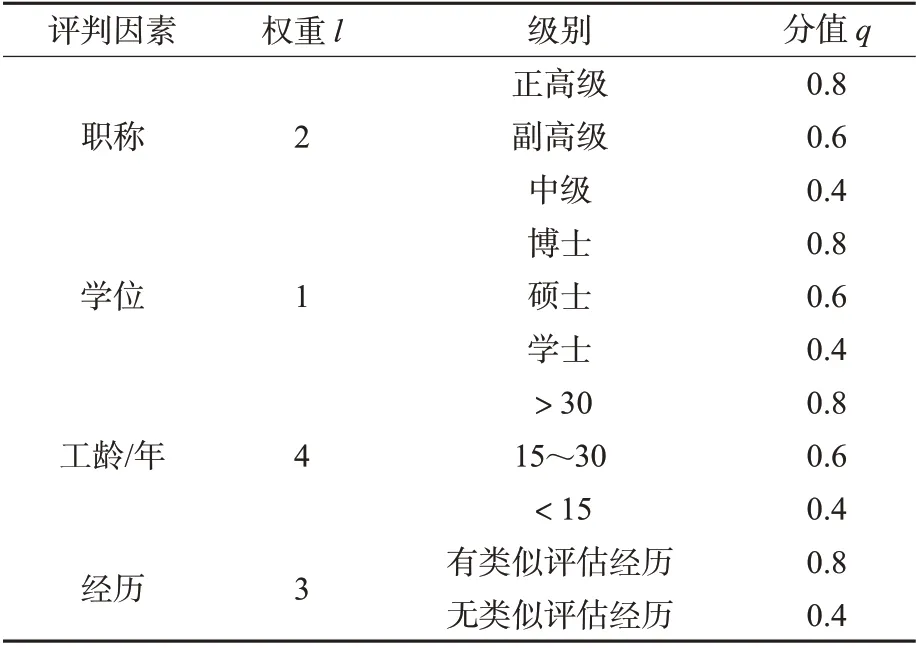
表9 专家可信度评判标准Tab.9 Expert credibility assessment standard
专家可信度O的计算见式(20)。
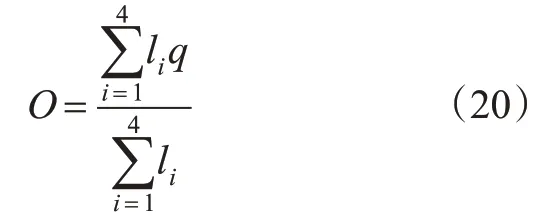
式中:l为专家所占权重;i为专家评判因素;q为结合专家在4个方面的实际情况取值。例如,1位正高级道路交通安全博士,55岁,工龄30年,有类似评估经历,则其可信度见式(21)。

将各专家的评定结果与对应的可信度结合[24],利用AHP 确定各评估指标主观权重,依据式(5)~(10)确定客观权重,式(11)~(12)确定组合权重,计算得到各评估指标的权重,见表10。
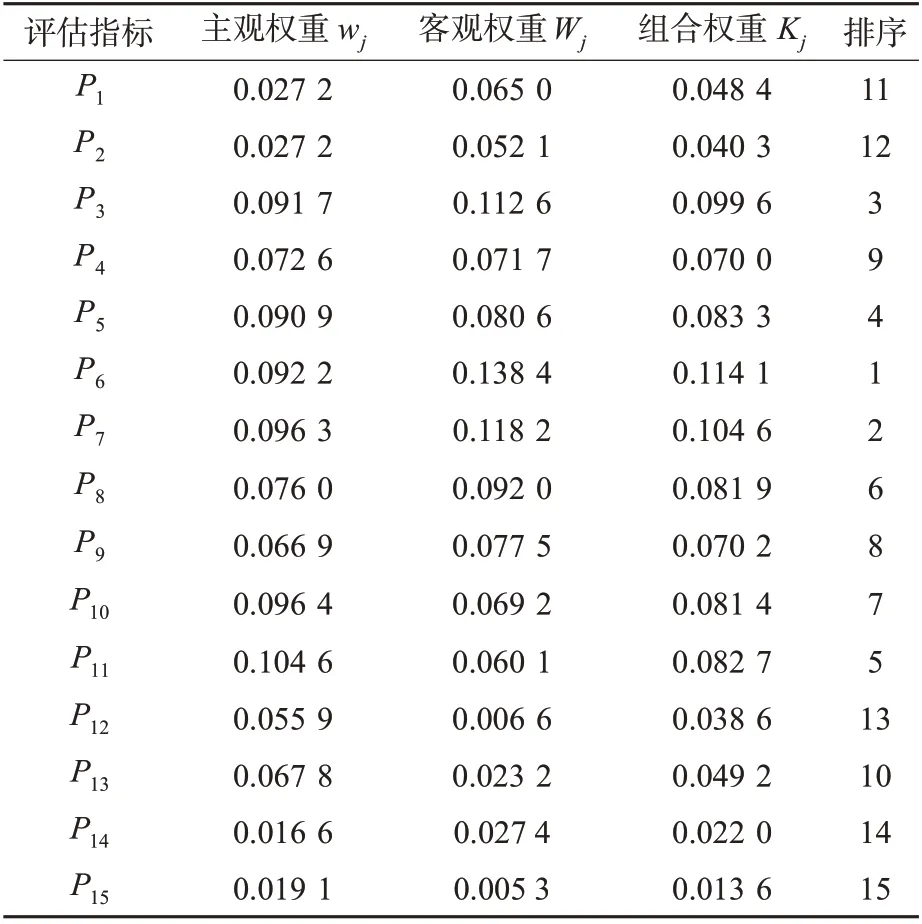
表10 各评估指标权重Tab.10 Weighting of each assessment indicator
4.3 评估指标隶属度计算
将式(13)~(14)进行Matlab 编程并运算,得出各评估指标与不同风险等级之间的隶属度及隶属风险等级云图。因篇幅有限,本文仅展示以Y 路段为例的隶属度计算结果,见表11;且Y路段以视觉特性为例的隶属风险等级云图见图6,红色散点为综合评判模糊等级特征值代入Matlab 模型运算1 000 次的结果,可表征各评估指标与各风险等级之间的隶属关系。

表11Y 路段各评估指标隶属度评判矩阵Tab.11 Assessment matrix of membership degree of each assessment indicator in Section Y
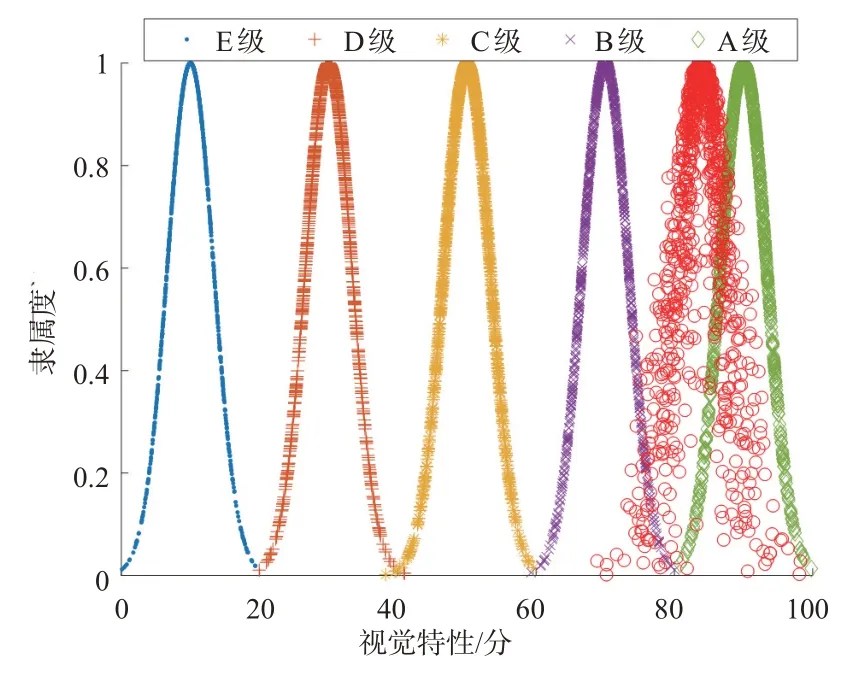
图6 Y路段视觉特性风险等级云图Fig.6 Cloud map of risk level of visual characteristics of Section Y
4.4 风险等级确定
将上文的计算结果代入式(15)确定综合评判向量B,并依据最大隶属度原则确定最终风险等级,评判向量计算结果见表12。
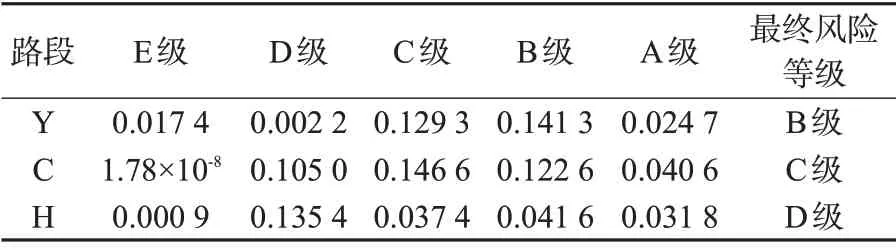
表12 各路段交通风险综合评判向量Tab.12 Comprehensive assessment vector of traffic risk for each road section
4.5 风险评估结果分析
对各路段评估指标风险等级隶属度计算结果进行整理,结果见图7。
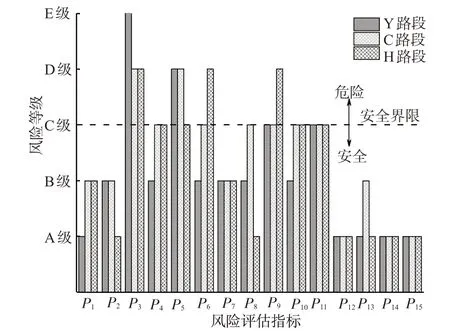
图7 各路段评估指标隶属风险等级图Fig.7 Assessment indicators of each road section belong to the risk level map
通过式(16)~(19)求出置信度因子θ,对评估结果进行检验并识别出各路段较危险的指标,见表13。不同方法评估结果见表14。
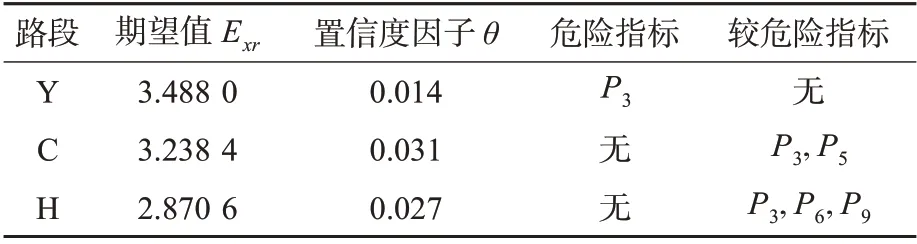
表13 各路段评估结果对比Tab.13 Comparison of assessment results of each road section
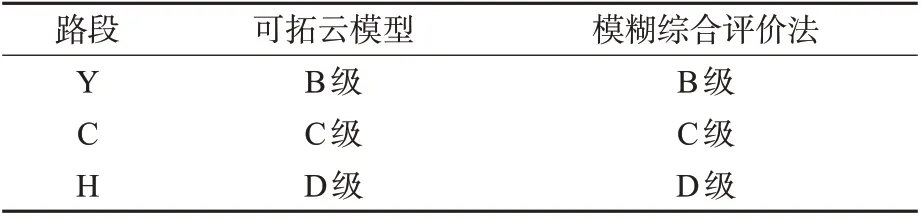
表14 不同方法评估结果对比Tab.14 Comparison of assessment results of different methods
3条路段的置信度均小于0.05,表明评估结果可信[25]。整合表9 和表10 评估结果可知,Y 路段风险评估为B级,P3为危险指标,处于较安全等级;C路段风险评估为C级,P3,P5为较危险指标,处于中等安全等级;H路段风险评估为D级,P3,P6,P9为较危险指标,处于较危险等级。将评估结果与各路段的事故绝对数(见表7)进行对比发现,评估结果与3条路段的实际情况相符,且评估结果与模糊综合评价法一致,验证了该模型在风险评估过程中的适用性。
5 结束语
1)综合考虑多种因素,确定了更为全面的交通风险评估指标体系。通过云模型和可拓理论的结合,将可拓云模型运用于CHVC 的交通风险评估研究中,实现定性指标的定量转化,解决了传统可拓法在评估过程中无法兼顾指标边界模糊性的问题。
2)与其他评估方法相比,可拓云模型的评估结果能够提供更多的信息。期望值Exr代表各路段所处的风险等级,Y路段的期望值计算结果为3.488 0,高于C路段的3.238 4,表明Y路段比C路段更安全;同时置信度因子θ均小于0.05,验证了评估结果的可信度。
3)以云南省3 条高速公路路段为例,利用可拓云模型评估了各路段的风险等级,并识别出各路段危险性较高的指标。将评估结果与各路段事故绝对数和其他评估方法对比验证了可拓云模型在交通风险评估过程中的可行性和适用性。
4)基于眨眼频率对不同平曲线形组合形式的安全性规律进行分析,得出安全性排序为:缓和曲线和直坡>缓和曲线和竖曲线>直线和直坡>直线和竖曲线>圆曲线和竖曲线>圆曲线和直坡;此外,基于LF值变化规律得出驾龄长的驾驶员比驾龄短的驾驶员LF值变化幅度小。
5)交通风险受多种因素综合影响,本文所构建的风险评估指标体系仍不够全面,还有待在实践中不断检验、补充和完善。此外,本文只是针对高速公路平纵组合路段展开研究,对于不同等级的道路,因其各项指标要求和交通环境存在较大差异,该方法的适用性有待进一步探讨。
因此,随着交通风险课题研究的不断深入,如何构建1个更全面且具有普适性的平纵组合路段交通风险评估指标体系有待进行更详细的研究。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
中国交通信息化(2019年2期)2019-03-25
活力(2019年22期)2019-03-16