无信号控制交叉口老年驾驶人转向行为图谱研究*
2022-07-20 01:43倪定安郭凤香周燕宁
交通信息与安全 2022年3期
倪定安 郭凤香 周燕宁
(1.昆明理工大学交通工程学院 昆明 650500;2.武汉理工大学智能交通系统研究中心 武汉 430000;3.深圳市城市交通规划设计研究中心 广东深圳 518000)
0 引 言
根据第七次人口普查结果显示,我国60岁以上人口占比已经超过了18.7%,65 岁以上人口占比超过13.5%,距离65岁以上人口占比14%的正式“老龄社会”标准仅差0.5%,目前我国老龄人口仍在以3.3%的平均增长率扩增,即将踏入老龄社会。伴随着公安部实行新政取消70 岁的驾驶执照申请年龄上限,越来越多通过身体机能测试的60岁以上老年人申请驾驶执照驾车出行。越来越多的老年人开始驾车出行,与老年人相关的交通事故也急速增加[1]。由于老年驾驶人在视觉上存在弱化[2-3],事故率逐步上升[4],驾驶稳定性也更差[5-6],而导致老年驾驶人交通事故的主要因素是年龄[7]、性别[8]、态度[9]、交通[10]、道路环境[11]。交叉口发生交通事故的概率要高于其他直线路段[12-14],但是随着城市化基础设施的完善,大多数城市交叉口都设置了信号控制灯优化交叉口减少冲突,交通事故率也较低。而在城乡接合处、山区公路及农村地区的交叉口多以无信号控制为主,存在交通流混乱、冲突区域多、交通事故频发,以及事故责任划分盲区等问题,相较于直行冲突,转向行为产生的冲突点更多且交通流复杂。对此,本文在社会老龄化趋势下研究无信号控制交叉口下老年驾驶人的转向驾驶行为具有一定的意义。
交叉口处的驾驶行为主要包含直行与转向,转向行为较于直行存在更多的冲突点。转向过程主要涉及到驾驶人的驾驶操作,刘志强等[15]基于驾驶员的油门踏板操作量、制动踏板操作量,以及车速等数据建立了驾驶人转向行为模型,该模型对驾驶行为具有较高的识别率。驾驶人在左转向与右转向情境下的驾驶行为存在差异,薛志超等[16]通过分析驾驶人在不同转向环境下的驾驶人注意力分配特征,发现驾驶人在左转向与右转向环境下的注视区域存在差异;齐凯等[17]通过分析左右转向下驾驶人的脑电信号特征,发现转向引起的脑电位变化与想象运动过程中脑电位变化一致。Zhao 等[18]通过驾驶模拟器研究驾驶人在左转与右转情境下的驾驶行为,研究发现左转行为不会对交叉口造成严重的安全风险。国内外学者对无信号控制交叉口的研究重点更多是在如何提高通行能力、减少延误等,对此类交叉口下驾驶人操作行为的研究较少,Digvijay等[19]通过模拟实验评价驾驶人的驾驶行为,发现右转的车辆冲突反应时短、风险大;Akhilesh 等[20]通过视频记录无信号控制交叉口下的车辆行驶数据,分析车辆临界间隙。老年驾驶人在交叉口环境下的驾驶行为与普通人相比下会呈现一定的弱势,Zhao 等[21]基于实车试验研究老年驾驶人在直行和穿越交叉口的驾驶压力,发现老年驾驶人会低估驾驶压力同时倾向于跟驰前车减少压力。王佳敏[22]通过驾驶模拟实验分析不同场景下老年驾驶人的驾驶行为特征,建立了基于感知、决策的老年驾驶人右转的个性化操纵模型。综合国内外研究多是提取驾驶人的行为特征数据进行静态分析,缺少能将驾驶人在转向行为中信息传递处理的过程从时序上呈现的方法,基于图谱理论结合无信号控制交叉口下老年驾驶人转向行为特征可将驾驶人的转向行为时序可视化,可为制定老年驾驶人安全行驶训练方法提供理论依据。
本文通过驾驶模拟实验获取无信号控制交叉口下老年驾驶人与中青年驾驶人的转向行为特性数据,分别从车辆行驶数据、眼动数据与生理心理数据上对2 类驾驶人进行转向行为特征分析,重点分析了老年驾驶人的心率变异性相关时域频域指标;基于图谱理论绘制驾驶人的特征节点变化,动态展现驾驶人转向过程中的信息处理过程,针对驾驶人在行为图谱表征出来的行为问题进行训练改正,可为老年驾驶人行为改善措施提供理论依据。
1 实 验
1.1 实验设计
为了研究驾驶人在转向情境下的驾驶行为,设计了1条包含6个无信号控制交叉口的实验场景,实验场景应用昆明理工大学交通工程学院自主研发的VS-Design 三维场景设计软件绘制,实验路线包含6个转向交叉口,分别包括3个左转向交叉口与3个右转向交叉口,路线长度为6 km,具体实验场景设置见图1,其中虚线表示实验主车行驶路线,转向过程中存在不同复杂度的干扰车辆与行人。
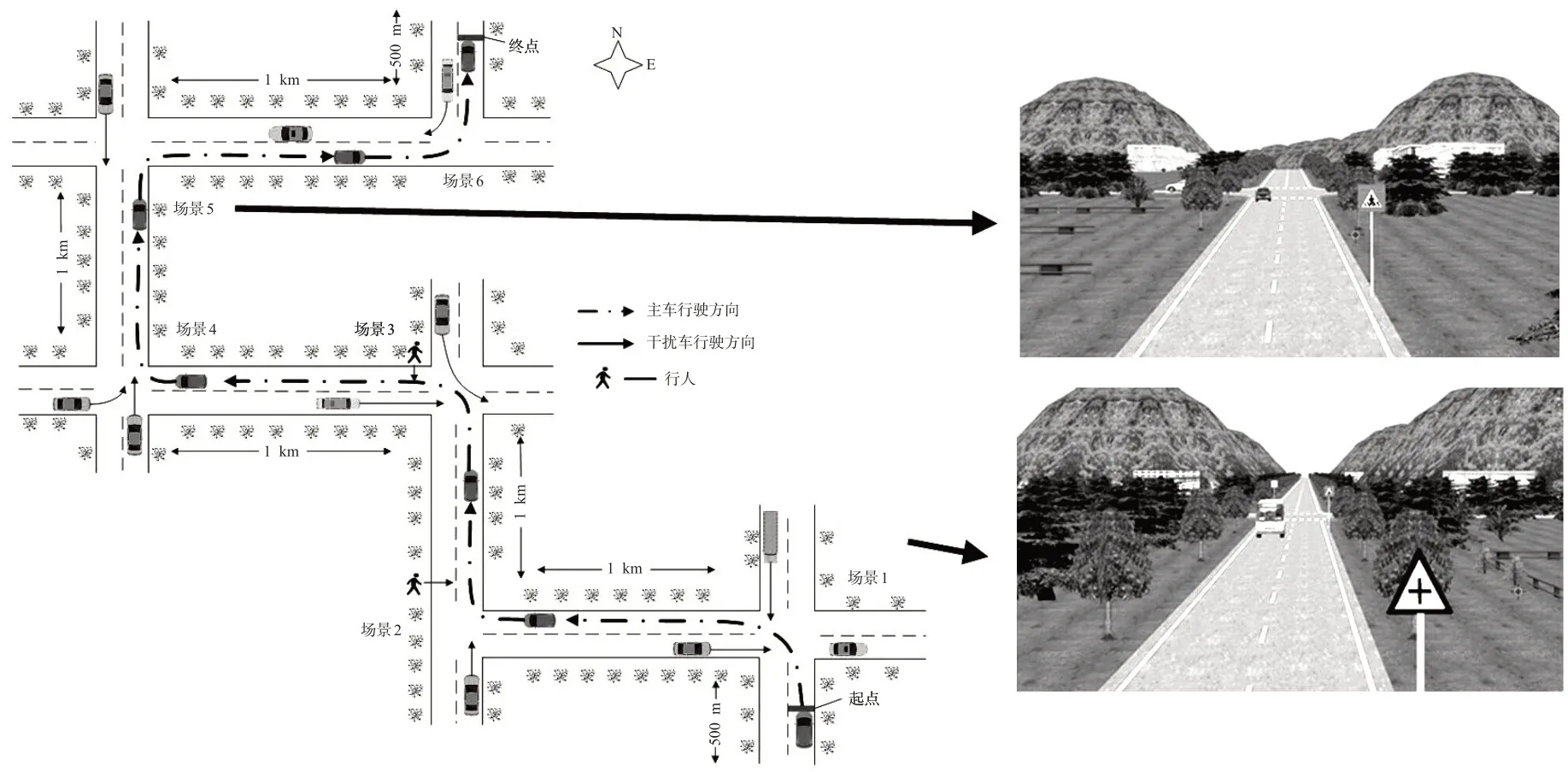
图1 行驶路线与仿真场景图Fig.1 The route of driving and simulation scenarios
1.2 实验对象
从社会中招募了45 名驾驶人,排除实验过程中由于晕眩、误操作等原因导致的10 名无效驾驶人数据,共收集了35 名有效驾驶人数据,其中老年驾驶人14 人(男性10 人,女性4 人,平均年龄63.78±3.61 岁),中青年驾驶人21 人(男性12 人,女性9 人,平均年龄38.38±9.49 岁)。为了避免驾驶经验与驾龄等客观因素对实验结果的影响,受试驾驶人均为具有2 年驾龄、20 000 km 驾驶里程的熟练驾驶人。
1.3 实验仪器
采用DSR-1000TS2.0驾驶模拟系统平台进行实验,DSR-1000TS2.0驾驶模拟系统是1套具有驾驶模拟操纵舱的半实物虚拟仿真产品,可实现在实验室控制条件下对道路交通系统进行的驾驶模拟闭环实验。同时还需要用到i-viewHED4 眼动仪和Ergo-LAB生理心理仪分别采集驾驶人的眼动数据和生理心理数据。仪器外观图见图2。

图2 实验仪器Fig.2 Apparatus of experiment
1.4 实验流程
实验开始前需调试检查驾驶模拟器、眼动仪、生理心理仪等硬件设备确保完好性,宣读实验导语,宣读完毕后驾驶人进入驾驶舱熟悉驾驶舱的各项设备与操作,然后进行5 min的驾驶适应性行驶预实验,在完全熟悉模拟器后给受试者佩戴眼动仪和生理心理仪并进行设备校准,调校完毕后在模拟器显示屏上加载实验场景并提示驾驶人开始正式实验,受试驾驶人在听到提示后点火启动模拟器,并挂挡松手刹踩油门开始行驶,驾驶人需要按照自身驾驶习惯并以40 km/h 的车速依次驶过6 个交叉口,在驾驶过程中实验人员不得影响驾驶人的驾驶操作确保实验数据的真实性,行驶完毕后工作人员提示受试者实验结束,受试者踩刹车拉手刹熄火,由工作人员帮助脱下实验设备并填写个人信息调查问卷。
1.5 实验数据
通过驾驶模拟器系统、i-viewHED4眼动仪及ErgoLAB生理心理仪记录采集受试驾驶人在行驶过程中的驾驶操作数据、眼动数据与生理心理数据,具体数据指标见表1。
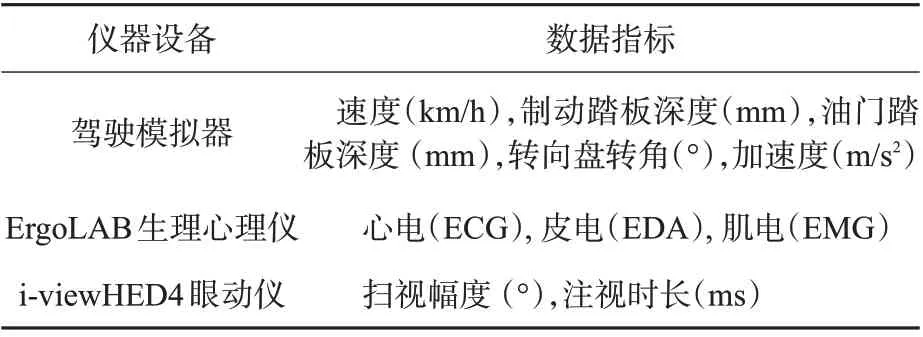
表1 驾驶模拟系统数据指标Tab.1 The indicator of driving simulation system
2 数据分析
2.1 车辆运行特性分析
速度是评价车辆运行状态最直观的指标,也可以反应驾驶人在驾驶过程中驾驶行为的变化情况,结合加速度与制动踏板相关数据综合分析驾驶人在转向过程中的驾驶行为特征,其中加速度可以反应驾驶人转向速度变化的快慢,表征驾驶人对交通环境反应的激烈程度,制动踏板深度与最早深制动时间均能表现驾驶人在转向过程中的驾驶信心与反应能力。为此以驾驶人行驶至弯道曲线中点处为时间点,分别截取曲线中点前后各10 s,共20 s的时间段数据作为数据源,分析老年驾驶人与中青年驾驶人的速度均值、标准差、加速度均值、制动踏板深度、最早深制动时间,并对2 类驾驶人的车辆运行特征值进行独立样本T检验,结果见表2。
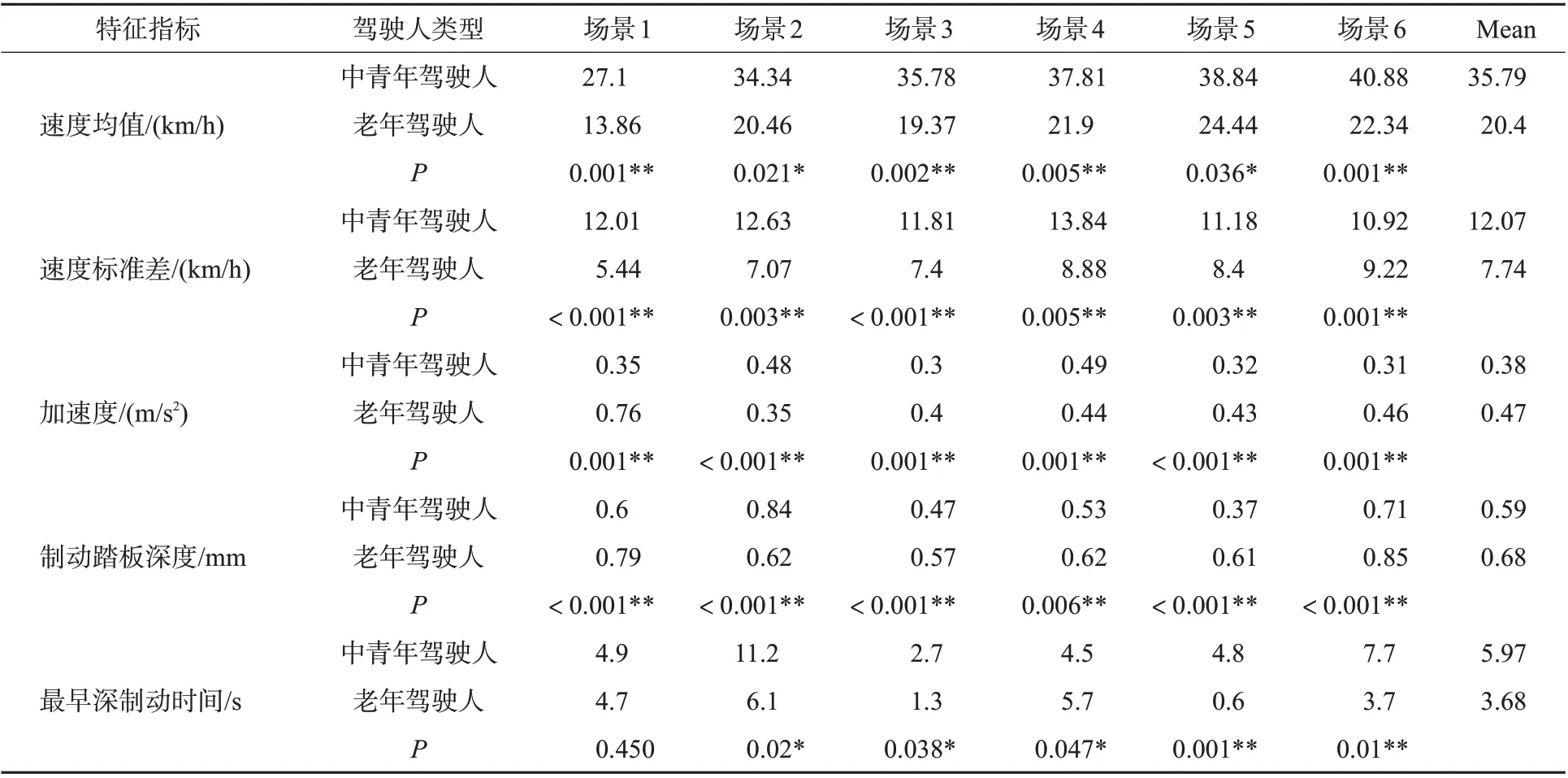
表2 不同场景下车辆运行特征值与差异性分析Tab.2 Analysis of characteristic values and differences of vehicle operation in different scenarios
从表2可以看出,2类驾驶人在逐渐熟悉交叉口环境后驾驶速度也变快,中青年驾驶人的行驶速度始终高于老年驾驶人,但是,较于老年驾驶人中青年驾驶人的速度分布更离散;老年驾驶人加速度大于中青年驾驶人的场景有4个,6个场景下老年驾驶人的加速度均值要高于中青年驾驶人,在独立样本T检验的结果里,2类驾驶人均表现出0.01水平下的显著差异性,说明老年驾驶人在转向过程中速度变化较快,对转向环境的反应较为激烈,中青年驾驶人较老年驾驶人显得稳重,具有较高的驾驶质量与舒适度;5个场景下老年驾驶人的制动深度大于中青年驾驶人,同时有5 个场景下老年驾驶人的最早深制动时间早于中青年驾驶人,说明老年驾驶人在转向过程中倾向于提前深踩制动控制车速,而中青年驾驶人在转向过程中反应能力较强,能够有效的控制车速,在独立样本T 检验的结果中,2 类驾驶人在制动踏板深度与最早深制动时间上均表现出显著的差异性。
2.2 眼动特性分析
在行驶过程中,驾驶员通过视觉获取交通环境信息,并做出决策。眼动行为一般包括注视与扫视,注视提供信息的深度,扫视提供信息的广度,二者构成了驾驶人的视觉信息源。选择注视持续时间与扫视幅度分别作为注视与扫视行为的评价指标。注视持续时间是指驾驶过程中1次注视行为所花费的时间,可以反映驾驶人从交通环境中获取有效信息所花费的时间,花费的时间长短表征驾驶人获取有效信息的难易程度。扫视幅度是指驾驶人前后注视点的夹角,可以反映驾驶人对交通信息收集的广度,幅度越大收集的信息也越完整。对驾驶人的注视持续时间与扫视幅度数据进行汇总统计,并进行差异性分析,分析结果见表3。
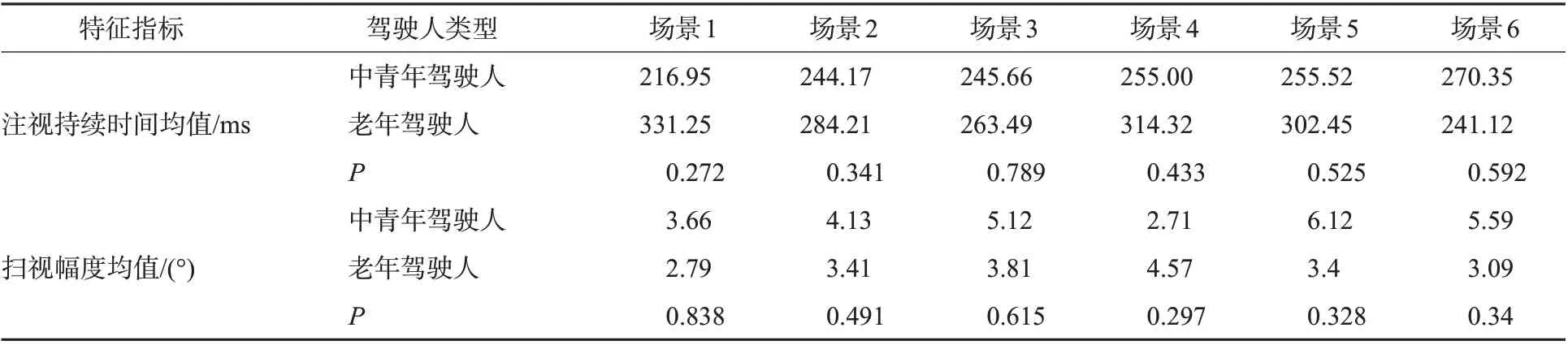
表3 驾驶人眼动特征统计及差异性分析Tab.3 Statistic and difference analysis of driver's eye movement characteristics
由表3可见:场景1~5 下老年驾驶人的注视持续时间都长于中青年驾驶人,说明老年驾驶人需要花费较多时间理解交通信息;除了场景4 下老年驾驶人的扫视幅度大于中青年驾驶人,其余5个场景下老年驾驶人的扫视幅度均较小,说明老年驾驶人在交通信息采集的广度上要弱于中青年驾驶人。但是2 类驾驶人的视觉特性没有表现出显著的差异性。
2.3 生理特性分析
2.3.1 皮电特征
皮电值易受环境影响,因此选择皮电增长率作为研究驾驶人皮电变化的指标,皮电增长率是指驾驶人在驾驶过程中的皮电增量值与平静状态下的皮电值的比值,可以表征驾驶人在驾驶过程中情绪变化的快慢,反映驾驶人的警觉程度。
基于Ergo LAB 数据处理软件提取皮电数据并进行处理,计算皮电增长率均值,并进行独立样本T检验,结果见表4。
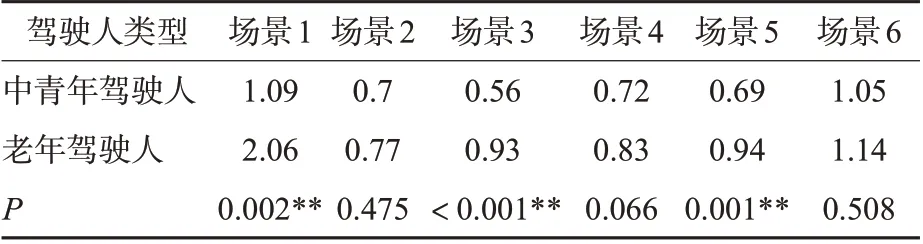
表4 驾驶人皮电增长率与差异性分析Tab.4 Analysis on the growth rate and difference of drivers'skin electricity
由表4 可见:老年驾驶人的皮电增长率始终要高于中青年驾驶人,其中在场景1/3/5下表现出显著的差异性,反映老年驾驶人在转向时情绪变化较快,同时警觉程度上升。
2.3.2 肌电特征
采用表面肌电(sEMG)信号作为数据源,同时考虑到表面肌电信号易受环境影响,应用Ergo LAB 数据处理软件对sEMG 信号进行小波降噪处理,汇总肌电频率均值,并进行独立样本T 检验,结果见表5。
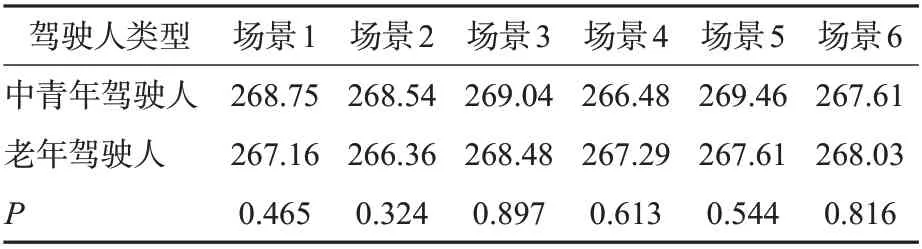
表5 肌电频率均值及差异性分析Tab.5 Analysis of mean value and difference of EMG frequency
由表5 可见:老年驾驶人与中青年驾驶人在肌电频率均值上的差异不大,同时在差异性检验上也不明显。
2.4 心理特性分析
心率的快慢可以反应驾驶人情绪的紧张程度,但是考虑到年龄、性别都会影响驾驶人的心率,应用心率增长率与心率变异性研究驾驶人的心理变化情况,其中心率增长率是指驾驶人在转向过程中与静态驾驶状态下的差值与静态驾驶状态下心率值的比值,心率变异性用来反应驾驶人的生理心理反应与情绪之间的互动关系,心率变异性中时域频域的分析指标较多,选择时域中的SDNN、RMSSD、PNN50 与频域中的LF、LF/HF、TP作为心率变异性的评价指标,评价指标解释见表6。
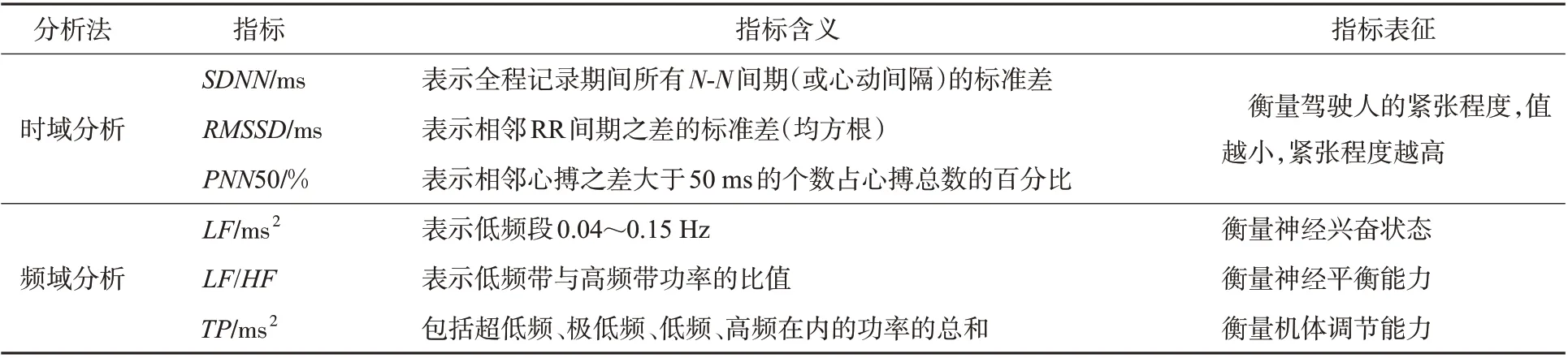
表6 心率变异性评价指标Tab.6 Evaluation indicator of heart rate variability
计算驾驶人的心率增长率与心率变异性各评价指标并统计汇总,并检验其差异性,分析结果见表7。
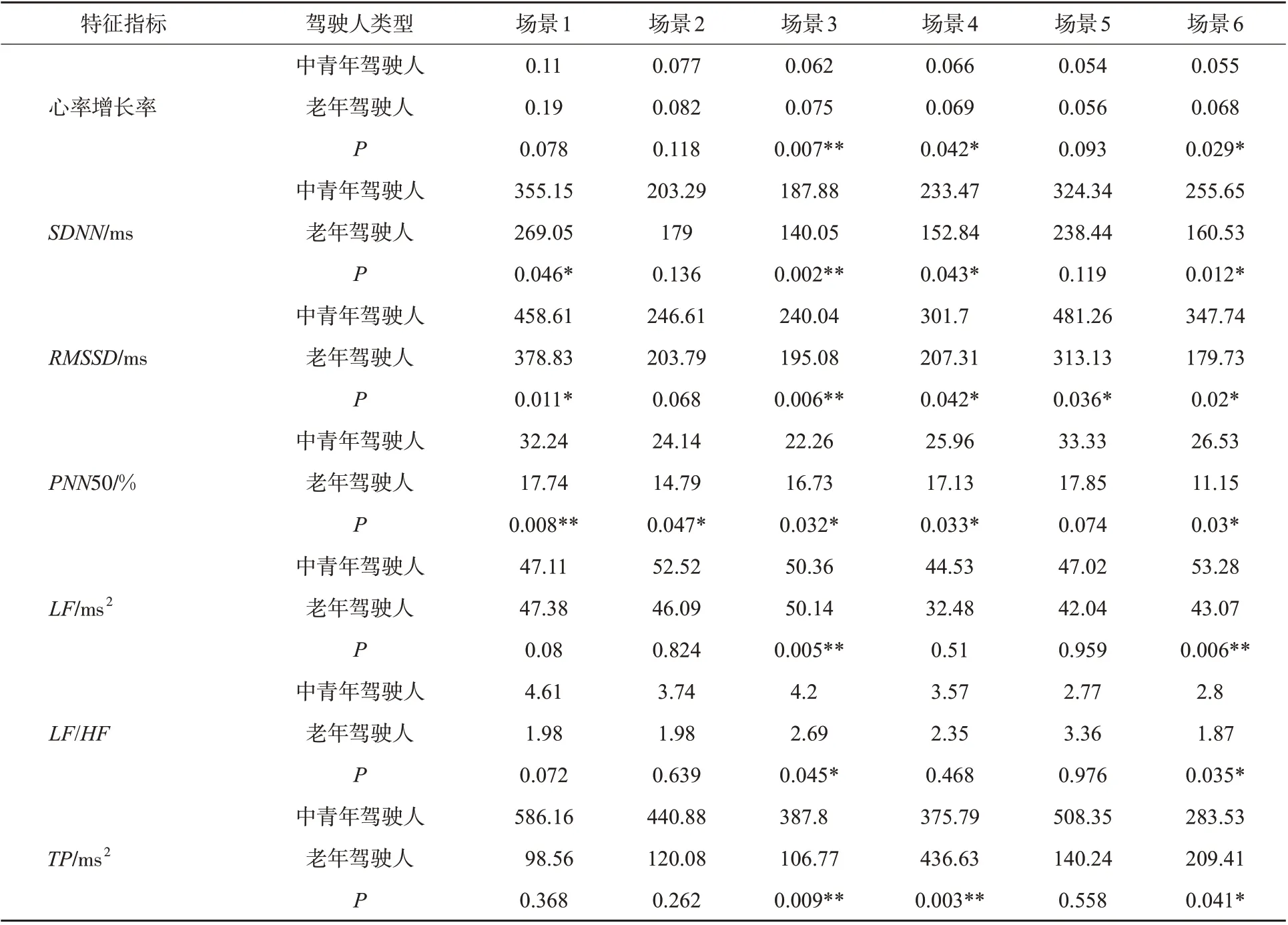
表7 驾驶人心电指标分析及差异性分析Tab.7 Analysis of driver's ECG indicator and difference
由表7可见:在6个交叉口场景下老年驾驶人的心率增长率均大于中青年驾驶人,同时在场景3/4/6下2 类驾驶人表现出了显著的差异性;在心率变异性的时域指标上,SDNN、RMSSD与PNN50 可以反映转向过程中驾驶人心跳间隔的快速变化情况和离散程度,其中SDNN与RMSSD值会随着驾驶人紧张程度的上升而减少,老年驾驶人的2 类数据值均要小于中青年驾驶人,说明老年驾驶人在转向时情绪较紧张,驾驶负荷较大,同时差异性主要体现在左转向的场景1/3/6 下,在心率变异性的频域指标上,老年驾驶人的LF值低于中青年驾驶人,说明老年驾驶人的神经兴奋程度较低,老年驾驶人的LF/HF值也较小表现出较差的驾驶平衡能力,老年驾驶人的TP值较低反映老年驾驶人的身体调节能力较差,老年驾驶人与中青年驾驶人的频域差异性主要表现在左转向的场景3 和场景6 中。结合心率增长率、心率变异性指标的分析,发现老年驾驶人在转向场景下容易出现身体机能不平衡与调节不及时的问题,在左转向场景下行为的差异更为明显。
3 图谱与信息转移模型的构建
根据上述驾驶人3 类行为特性数据的分析结果,可以反映出老年驾驶人与中青年驾驶人在行为特征值上的差异,而为了表征2 类驾驶人的时空差异和驾驶系统中行为信息转移的过程,应用图谱理论描述驾驶人的转向行为变化特征,构建驾驶人转向行为图谱,分析老年驾驶人与中青年驾驶人的行为节点变化,为老年驾驶人改进驾驶行为提供参考。
3.1 驾驶人转向行为图谱构建
基于上述数据,分别选择驾驶人的各项特性指标作为图谱构建基础,指标信息见表8。
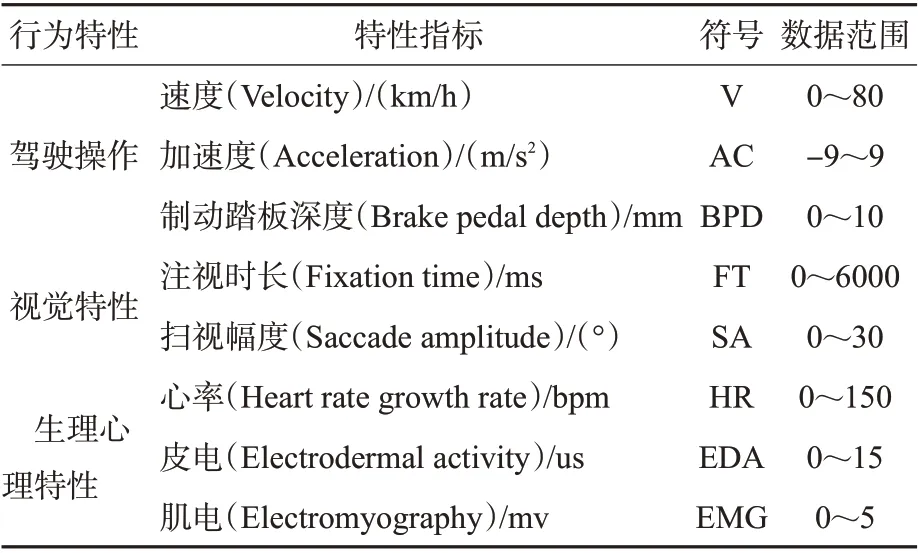
表8 图谱构建的指标信息Tab.8 Indicator information of map construction
为了减少环境及其他因素对特性指标的影响,需要对转向驾驶数据进行平滑降噪处理,平滑降噪计算见式(1)。

在上述特性数据经过平滑降噪后,需要构建特性节点,特性节点是用来表示某时刻该指标值发生了明显的变化,并引发下1个节点的变化,构建节点需要计算出动态阈值Tu和Td,计算动态阈值的步骤如下。
1)在经过平滑降噪处理后的驾驶人各项特性指标数据的基础上,计算各行为特性指标数据的均值mˉ与标准差s,见式(2)~(3)。
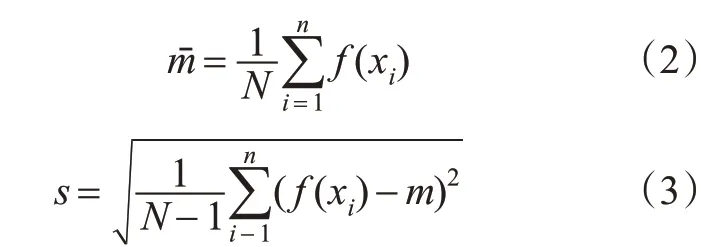
式中:f(xi)为平滑降噪后的数据,即式(1)计算结果;mˉ为该行为特性指标数据平滑降噪后的均值;s为该行为特性指标数据平滑降噪后的标准差;N为计算驾驶人行为特性指标数据的个数,每次取10。
2)应用平滑降噪后的驾驶人行为特性指标数据,计算出各个行为特性指标数据的最大差异性Xmax,见式(4)。

式中:xmax为该行为特性指标数据平滑降噪后的极大值;xmin为该行为特性指标数据平滑降噪后的极小值。
3)计算动态阈值Tu与Td,见式(5)~(7)。
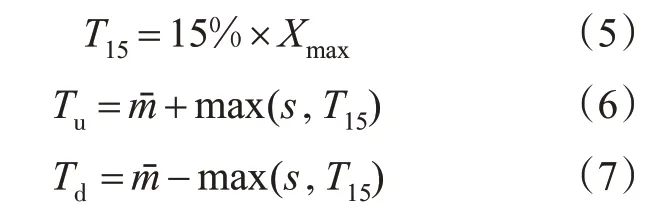
式中:T15为处于85%分位值以外的数据,主要用于降低数据突变的影响;Xmax为式(4)的计算结果;mˉ与s分别为式(2)和式(3)的计算结果。
在计算出Tu与Td后,将平滑降噪后的各特性指标数据与2 个动态阈值进行比较,如果存在大于动态阈值Tu或者小于动态阈值Td,那么就可以构建该行为特性的变化节点。
在数据编码时,以20 s的数据截取时间为横轴,驾驶人行为特性指标值为纵轴,分别以不同图形标记驾驶人特征指标值的变化。当驾驶行为特性指标数据大于动态阈值Tu时,记录起止时间作为节点的起止时间,并进行标记,表示某时间段出现数值增加的节点,当驾驶行为特性指标数据值小于动态阈值Td时,记录起止时间作为节点的起止时间,并进行标记,表示某时间段出现数值降低的节点,绘制出驾驶人转向行为图谱。
图谱只能从时间上反应驾驶人的个体数据,所以分别选取2名具有代表性的老年驾驶人与中青年驾驶人,选取标准为特性指标值均在均值附近且不超过标准差范围,选取复杂度相同的左转向场景1和右转向场景4作为代表场景,在经过数据比较后,选择8 号中青年驾驶人(30 岁,具备10 年驾龄与11万km 驾驶里程经验的男性驾驶人)与22 号老年驾驶人(68岁,具备43年驾龄和70万km驾驶里程经验的男性驾驶人)作为2类驾驶人的代表,分别构建驾驶人转向行为图谱。
基于场景1的驾驶人数据构建驾驶人左转向行为图谱,见图3。基于场景4的驾驶人行为特性数据构建驾驶人右转向行为图谱,见图4。
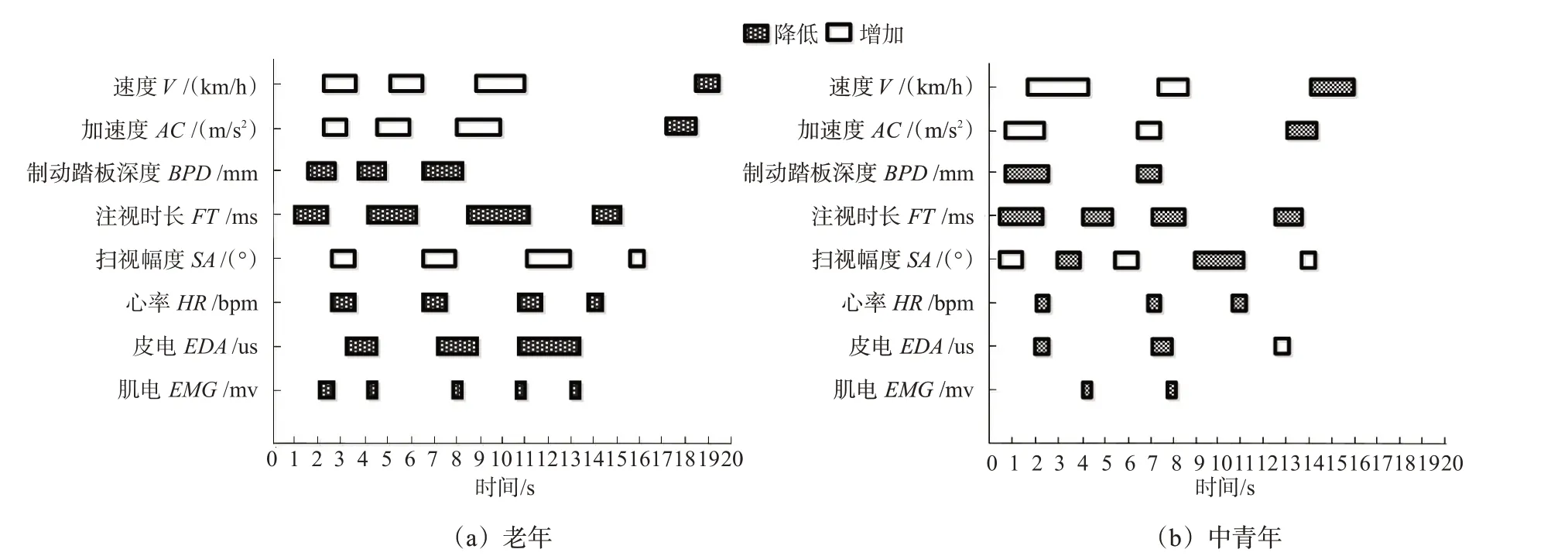
图3 驾驶人左转向行为图谱Fig.3 Graph of drivers'left turning behavior
图4 驾驶人右转向行为图谱Fig.4 Graph of drivers'right turning behavior
在图3 的驾驶人左转向行为图谱中,在驾驶操作中,中青年驾驶人会提前采取深制动控制车速,老年驾驶人制动时间要慢于中青年驾驶人并且会选择多次制动控制车速;在视觉特性方面,2类驾驶人均呈现出一定的注视时长,但是老年驾驶人存在注意力分配不均的问题导致在进行注视时无法进行一定程度的扫视行为,导致信息收集的广度不够;根据生理心理特性指标数据的变化情况,2 类驾驶人的指标值都出现了增长,但是老年驾驶人的增长持续时间较长,说明老年驾驶人的紧张情绪持续时间较长,在心理调节方面要弱于中青年驾驶人。在图4 的驾驶人右转向行为图谱中,驾驶人的行为特性指标值相较于在左转向场景下都表现出了不同程度的提升,最为显著的是视觉特性上老年驾驶人在进行注视的同时也能进行一定程度的扫视行为,说明右转向场景下驾驶人的心理压力比左转向场景下小,驾驶人能以较为稳定的状态完成转向行为。
3.2 驾驶人转向行为图谱时空差异性分析
依据上面的驾驶人转向行为图谱可以定性的表征驾驶人的差异,但是不能量化驾驶人之间的差异,对此引入最长公共子序列(LCSS)量化老年驾驶人与中青年驾驶人之间的差异,LCSS一般定义为多个序列中最长的公共序列,计算见式(8)。

式中:LCSS(k)(I,J) 为图谱I与图谱J之间前k组有公共区域的节点长度;为图谱I中第k组节点与图谱J有公共序列的起始时间点;)为图谱J中第k组节点与图谱I有公共序列的开始时间点;δk为图谱I中第k组节点与图谱J有公共序列的开始时间点差值上限;εk为图谱I中第k组节点与图谱J有公共序列的重合时间下限值;为图谱I与J的公共序列中第k组节点的重合时间长度;m为图谱I的节点数;n为图谱J的节点数;l为图谱I与图谱J之间存在公共序列的节点数。
在计算出LCSS后,通过式(9)计算图谱间的差异性指标DLCSS(I,J)。

式中:LCSS(I,J)为式(8)计算出来的处于图谱I与图谱J之间的最长公共子序列;min(m,n)为图谱I与图谱J中存在的最小节点数。
将驾驶人左转向与右转向的图谱数据代入式(8)与式(9),计算出差异性指标值DLCSS(I,J),其中DLCSS(I,J)∈[0,1],DLCSS(I,J)值越趋近于1,那么2类图谱存在的差异性就越大。其中,驾驶人在左转向情境下的时空差异值为0.85,右转向下的时空差异值为0.63,2类驾驶人在左转向场景下存在更为明显的差异性。左转向场景由于冲突点多、转向半径大、转向时间长,老年驾驶人转向过程中遇到冲突情况情绪容易紧张,导致信息获取处理与反应能力弱于中青年驾驶人;而右转向场景冲突点少、转向半径小、转向时间短,老年驾驶人能够凭借驾驶经验完成右转向,与中青年驾驶人的差异较小。
4 结束语
本文是在无信号控制交叉口的虚拟场景下进行的驾驶人转向实验,通过对比分析老年驾驶人与中青年驾驶人的转向行为特性研究不同年龄层次驾驶人的差异性,并应用图谱理论绘制驾驶人转向行为图谱。
1)交叉口转向过程中老年驾驶人在车辆运行数据、眼动数据、生理心理数据上均表现出弱于中青年驾驶人的趋势,并且在左转向情境下表现出了更大的驾驶压力与紧张心理。
2)在驾驶人转向行为图谱中,老年驾驶人主要的弱项是在注视的同时不能进行扫视行为,交通信息的采集广度不足,对此需要对老年驾驶人进行转向扫视训练,提高信息收集的广度,保障交通安全。
本文仅分析了老年驾驶人在转向过程中的特征及缺陷,后期可在此基础上进行针对老年驾驶人转向行为特征的训练优化研究,验证模型的准确性。
猜你喜欢
军事文摘(2022年24期)2022-12-30
建材发展导向(2022年14期)2022-08-19
保健医苑(2022年4期)2022-05-05
建材发展导向(2021年19期)2021-12-06
世界科学技术-中医药现代化(2021年7期)2021-11-04
少先队活动(2020年12期)2021-01-14
求学·理科版(2020年4期)2020-05-13
天津建设科技(2020年2期)2020-05-13
新世纪智能(数学备考)(2020年12期)2020-03-29
广东教育·高中(2017年11期)2017-12-04