复兴号服役动车组弓网受流性能数据跟踪采集方法研究*
2022-07-15 03:42:40孔龙飞韩通新刘忠彬
铁道机车车辆 2022年3期
孔龙飞,韩通新,李 卓,田 亮,刘忠彬,戴 晋
(1 中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081;2 北京纵横机电科技有限公司,北京 100094)
弓网受流性能参数用于评价受电弓和接触网系统相互作用。弓网受流性能试验是动车组整车型式试验的重要组成部分,同时也是高速铁路接触网系统动态验收试验的重要测试项目。自我国发展高速铁路和动车组以来,研究人员对高速动车组弓网受流性能开展了大量测试,为高速铁路弓网耦合、高速受流的弓网系统改进做出了重要贡献。
评价弓网相互作用的重要指标,主要是弓网动态接触力。此外,接触网动态抬升量和燃弧监测也被采纳为评价弓网相互作用的重要指标[1]。
为确保受电弓连续取流时没有电压降或电流损失,必须使受电弓和接触网保持良好的机械接触,否则会产生燃弧。燃弧会对周围环境产生电磁干扰、噪声干扰并加剧弓网间的磨耗。如果空气间隙持续增大,取流中断,车辆就会因为电源切断而失去牵引动力[2]。引起接触不良的原因主要包括弓网的机械振动、接触线损耗、接触线覆冰、接触力不足等[3]。弓网燃弧可通过测量弓网接触电阻、紫外光学传感器[1]和视频图像等方法进行测量[4]。
在运营速度远低于接触线横波传播速度时,利用受电弓通过接触线时的抬升量可以得知受电弓运行状况。支持结构上的最大抬升与受电弓的接触压力正相关,因此可以间接的反映出弓网动态接触力情况。动态抬升量测试方法包括2 种,即在接触网支持装置处固定测量方法和在车辆上利用光学仪器移动测量方法[2]。
研究运营动车组弓网受流性能变化规律,需要长时间对服役动车组弓网受流性能数据进行跟踪采集。普通服役动车组没有车载弓网受流性能监测设备,也不便于长期加装临时设备。如果为每辆动车组配备设备,势必是投资高、回报少的。一直以来,利用弓网监控视频人工分析弓网燃弧都是一个重要手段,文中利用复兴号动车组配备的弓网监控视频,自主研发了一套“基于弓网监控视频的弓网受流参数离线采集分析系统”,实现服役动车组弓网燃弧和受电弓动态包络线的跟踪检测。
1 系统组成
系统主要包括2 部分,第1 部分是弓网视频采集,第2 部分是弓网受流数据采集。弓网视频采集包括采集车载弓网监控视频和车辆传感器数据、数据合并、视频存储等。弓网受流数据采集包括弓网监控视频图像压缩合并处理、弓网燃弧识别和受电弓动态包络线参数测量。因为车载的弓网监控视频需要转存到车下用于进一步的弓网受流参数采集,所以这种数据采集方式属于离线采集。系统组成如图1 所示。动车组每台受电弓都配有受电弓监控系统,主要由高清监控摄像机、数据线、显示器、车载数据接收计算机、视频存储等部分组成。弓网视频都是以每10 min 为单位进行分段存储,原始像素2 048×1 536,视频帧率25 fps,视频数据较大。为了提高图像识别效率,首先对已存储的每段视频按需求进行压缩合并处理,压缩后视频图像像素为800×600,帧率25 fps,然后合并多段视频为1 个视频文件,最后经过受流数据采集分析系统完成弓网燃弧和受电弓动态包络线参数检测。
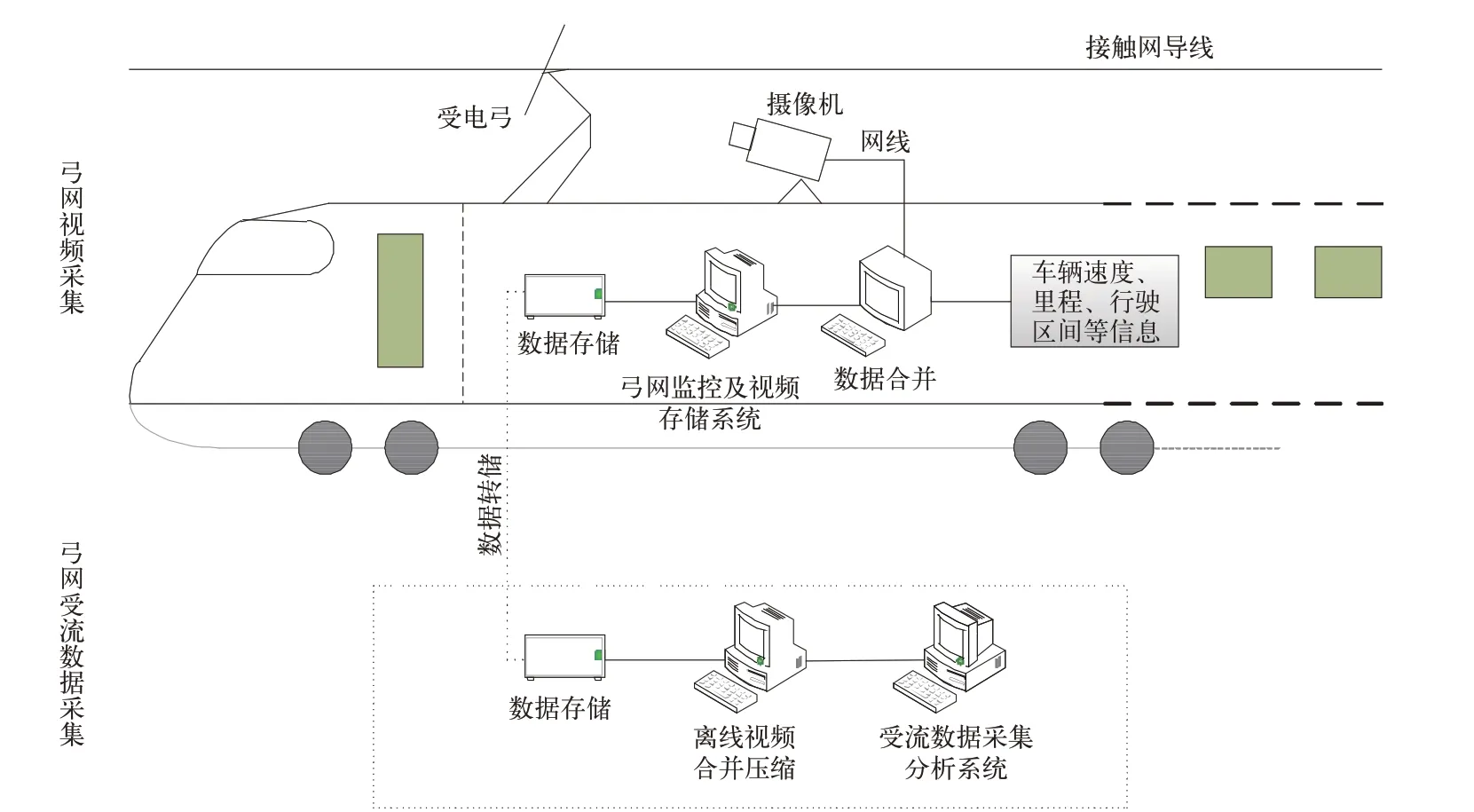
图1 弓网监控视频弓网受流参数离线采集系统组成示意图
2 实现方法流程图
算法流程如图2 所示。在采集前,首先在动车所内利用标定靶对已知受电弓滑板运动区域平面进行标定,得到图像坐标与世界坐标转换矩阵H并储存。然后再利用从动车组上转存下来并且做了压缩合并处理的视频完成数据采集。取每一帧当前图像,检测跟踪接触线和受电弓的接触点,从而确定燃弧可能发生的区域,利用燃弧前景轮廓特征来识别燃弧,并且保存发生燃弧的当前帧图像。由于受电弓动态包络线的测量重点部位往往位于若干个支柱处[5],所以需要智能识别接触点上方区域接触网定位装置,并且保存当前帧图像。为了提高识别和测量的准确性,需要人工复核保存的图像,在经过复核的图像上,利用鼠标拾取受电弓抬升距离和摆动量距离,即受电弓动态抬升量及横向摆动量参数。
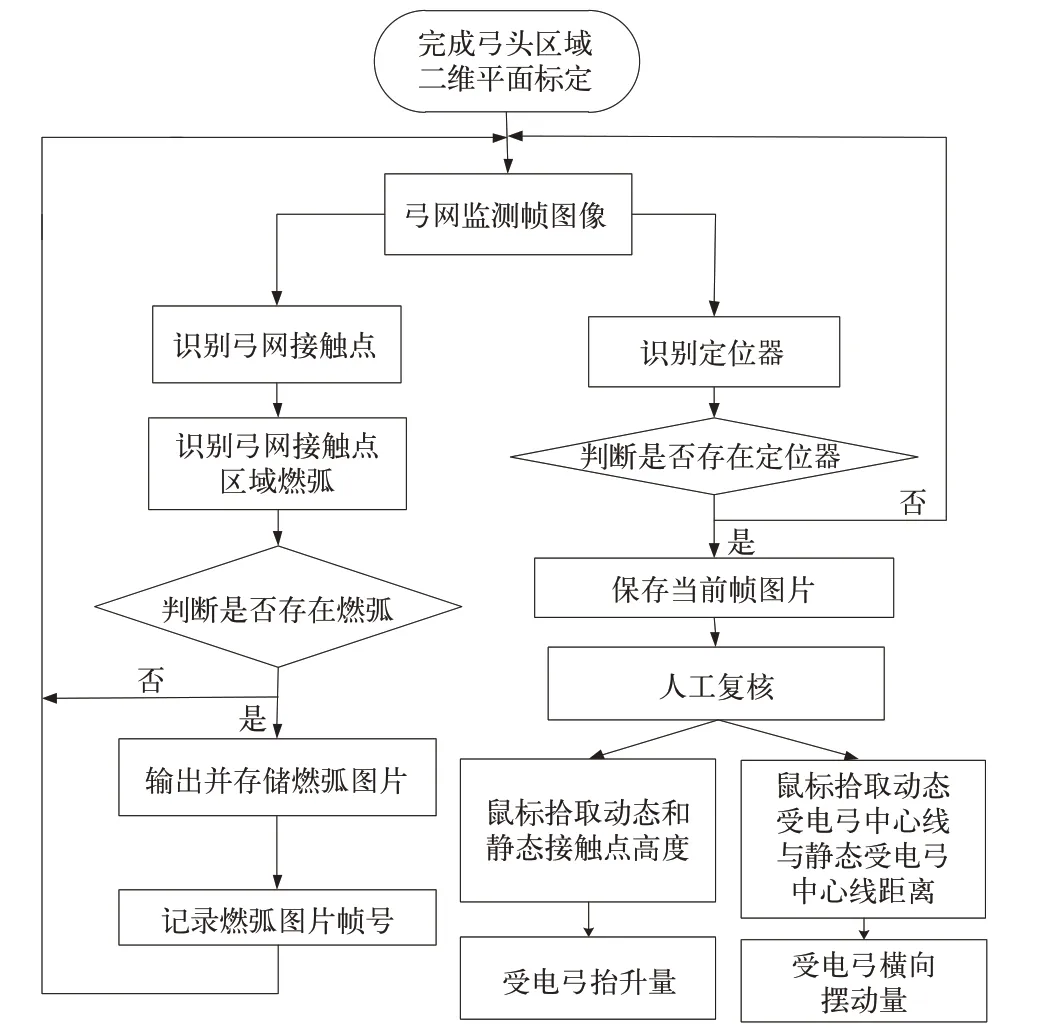
图2 实现方法总体流程图
3 接触点连续定位
受电弓与接触网的接触点识别是非常重要的,大量弓网问题的发生是由于这个点的受电弓与接触网的不可靠接触造成的[2]。
因此通过图像识别定位燃弧,首先要做到弓网接触点准确连续的定位。
建立复兴号动车组的单臂受电弓弓头垂向运动和横向运动平面坐标系,采用文献[6]提出的基于二维图像直线的受电弓滑板运动区域标定方法对车载的弓网监控视频图像进行标定,确定受电弓滑板图像每个像素点图像坐标与世界坐标的变换关系。
利用基于Sobel 算子的边缘检测算法,检测受电弓滑板和接触线边缘,采用概率Hough 变换的直线检测方法来识别受电弓滑板和接触线[7],通过滑板直线和接触线数学公式可以准确计算并定位滑板与接触线的接触点坐标,再用Kalman 滤波跟踪方法来识别滑板和工作支接触线的接触点。接触点检测过程如图3 所示。
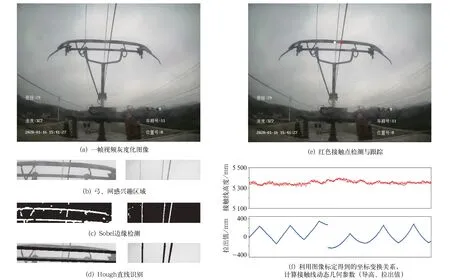
图3 弓网接触点连续定位过程
4 燃弧识别与图像存储
准确检测和跟踪弓网接触点后,可以由接触点来确定一个燃弧感兴趣区域,如图4(a)所示。检测感兴趣区域内的前景图像,如图4(b)所示。燃弧的识别判断方法主要包括燃弧前景检测,轮廓矩判断识别,滑板区域燃弧判断。
(1)前景检测
对燃弧感兴趣区域图像二值化处理,可以获得前景图像。设farc(x,y)表示输入燃弧感兴趣区域视频序列的原始图像,Farc(x,y)表示前景二值化图像,则二值化图像可以表示为式(1):

式中:255 为前景区 域;0 为背景区域;Th为二值化阈值。
燃弧区域图像像素值大于Th的像素点认为是前景区域,反之为背景区域。获得前景二值化图像后,为了消除图像噪声、不连续区域和空洞,对其采用连续的标准开运算和闭运算。
(2)轮廓矩判断识别
通过大量观察燃弧前景图像样本,掌握燃弧形态特征,可以准确识别燃弧及排除夜间补光灯的干扰。
图像矩可以用来计算轮廓形状的重心、面积、主轴和其他特征表示为式(2):

式中:I(x,y)表示像素点(x,y)的亮度值。
一阶矩和零阶矩可以计算轮廓的重心为式(3):

二 阶 矩M20、M11、M02可 以 计 算 轮 廓 的 方 向为式(4):
观察燃弧前景图像轮廓,将重心十分接近接触点、角度接近于0、轮廓最小外接矩形的长宽比例等作为先验知识,可以有效地识别出燃弧并且避免各种环境干扰。
(3)滑板区域判断
通过观察燃弧前景会侵入滑板区域,因此判断滑板区域是否有燃弧像素,也可以一定程度上排除干扰结果。如图4(c)所示。
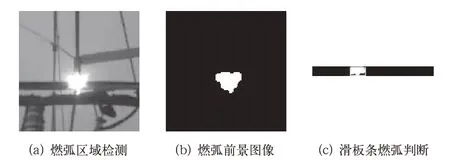
图4 弓网燃弧识别
燃弧被识别后,系统会自动输出并保存燃弧图像,并以帧号命名,供试验人员复核结果及做分析。部分燃弧识别结果如图5 所示。
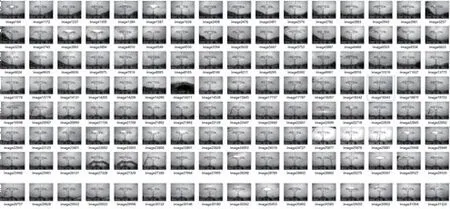
图5 燃弧识别结果
5 受电弓动态包络线测量
监控滑板上方区域的异常物,异常物轮廓连通面积大于一定阈值以区别接触线的轮廓,从而识别出定位装置,并保存当前图像。拾取静态下受电弓高度和拾取通过定位器时受电弓高度分别如图6、图7 所示。

图6 拾取静态下受电弓高度

图7 拾取通过定位器时受电弓高度
受电弓动态包络线参数测量是在受电弓滑过定位器时的图片中进行的,具体方法如下:
(1)抬升量测量方法
为了测量结果准确,首先人工复核图像中定位器是否接近受电弓滑板,然后利用鼠标手动拾取接触点坐标,自动测量出接触点高度值h1。鼠标手动拾取站台静止受电弓接触点高度h0。
则受电弓动态抬升量表示为式(5):

通过图6 和图7 的对比,可以看出受电弓在运行过程中有明显的抬升,运行速度341 km/h,受电弓抬升量为61 mm。
(2)横向摆动量测量方法
接触线动态拉出值测量曲线可以清晰地展示出接触线横向运行轨迹[8],而且也表明了受电弓滑过支柱的序号。对接触网静态数据表查表可以很快查找当前图片支柱定位点的静态拉出值S。因为接触网定位点处静态拉出值几乎是一个定值,几乎不随环境变化或受电弓动态作用而改变,所以定位点是一个理想的参照物,定位点静态拉出值是确定静态下受电弓中心线的关键。通过鼠标拾取弓网接触点,采用“橡皮筋技术”沿滑板中心方向绘制直线段,线段终点显示世界坐标距离,当距离等于静态拉出值|S|时,此终点被确定为静态下受电弓中心线的一点。最后利用同样的线段拾取方法,从静态下受电弓中心线这一点为起点鼠标拾取到受电弓滑板中心点(动态下受电弓中心线上一点)的距离ΔS,ΔS可以看作受电弓横向摆动量测量值。测量方法示意图如图8 所示,实测结果如图9 所示。定位点处接触线静态拉出值为237 mm,从接触点沿滑板中心绘制237 mm 直线,如黑色线段,然后拾取黑色线段终点到受电弓中心的距离,如红色线段。图中白线表示运动中受电弓的中心线。从图9 中可以看出受电弓横向摆动量为32 mm。
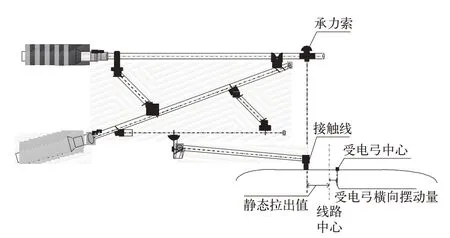
图8 受电弓横向摆动量测量方法示意图

图9 受电弓横向摆动量图像测量结果
如果车辆平稳放置时,考虑受电弓中心线与线路中心线有安装公差ε,则受电弓横向摆动量为ΔS+ε。
6 试验数据分析
利用文中方法对复兴号动车组弓网受流参数进行跟踪采集,如图10~图13 所示。具体试验过程如下:
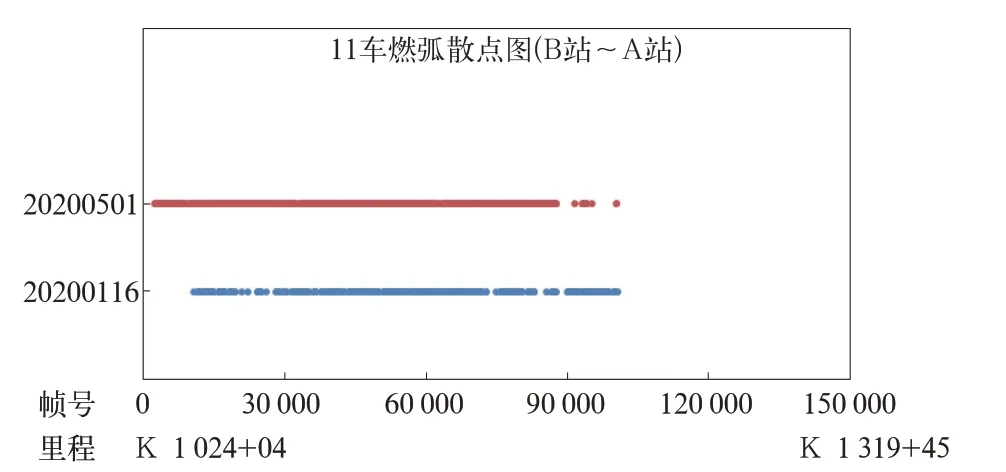
图1 3 CR400 动车组11 车受电弓2 次燃弧测量结果
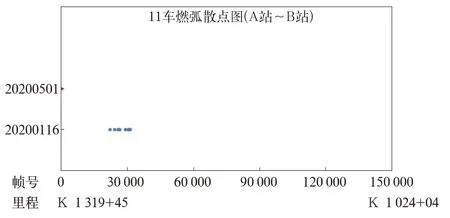
图1 2 CR400 动车组11 车受电弓2 次燃弧测量结果
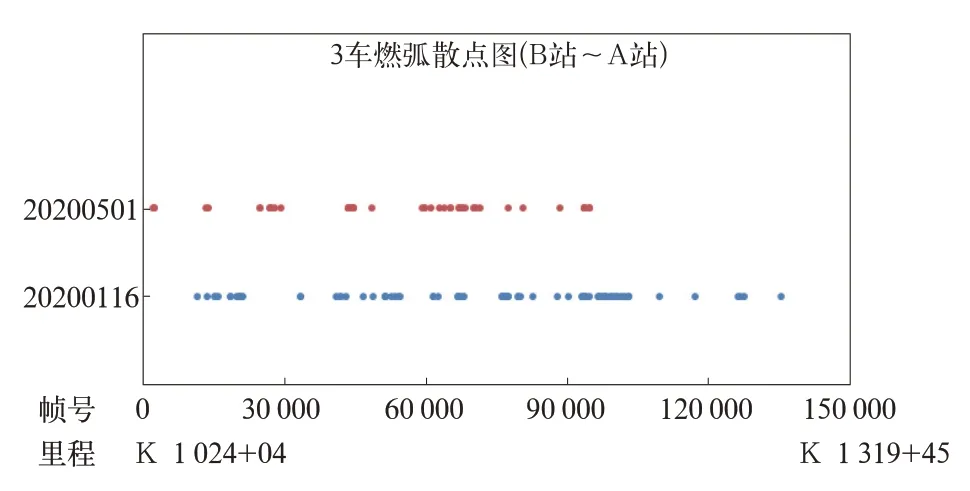
图1 1 CR400 动车组3 车受电弓2 次燃弧测量结果
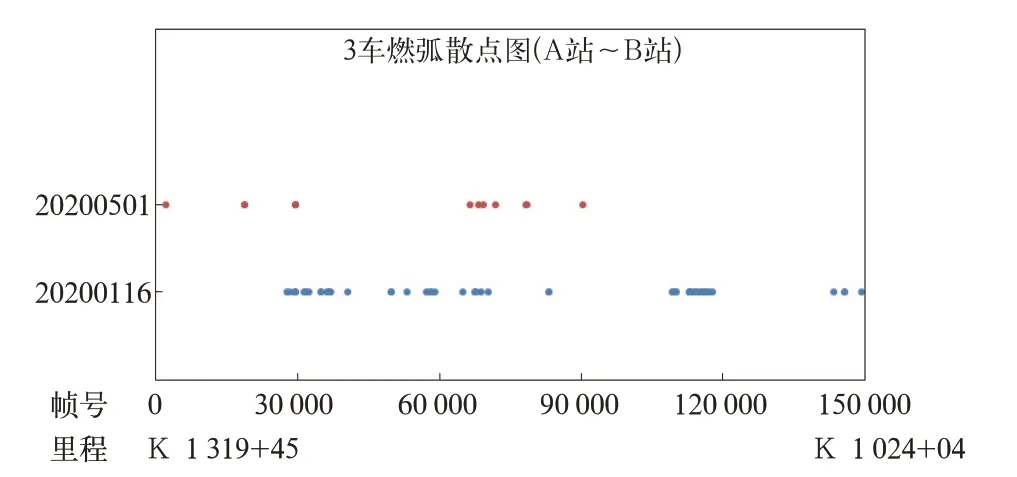
图1 0 CR400 动车组3 车受电弓2 次燃弧测量结果
试验要求:对运营里程在80 万km 以上的动车组弓网受流性能进行追踪测试
试验对象:17 辆编组CR400 动车组的2 台工作受电弓
试验地点:某高速铁路线路A 站~B 站区段上下行线
接触网高度:5 300 mm
其他要求:追踪测试数据期间,受电弓静态工作压力均在规定范围内。动车组2 次往返运行交路相同,通过弓网监测视频采集受流数据。
一列CR400 动车组2 台工作受电弓2 次跟踪测量的数据结果见表1。表中还给出了当天的受电弓静态压力和滑板最小剩余厚度数据用于数据对比分析。
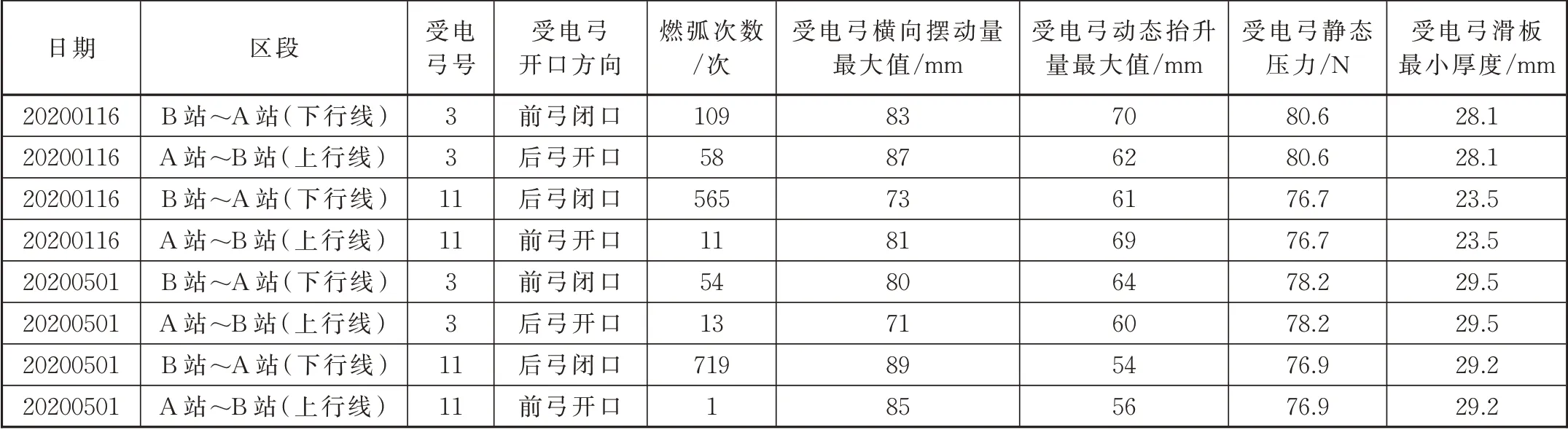
表1 CR400 服役动车组的受流数据跟踪测试结果
从表1 中燃弧数据对比可以得到以下几个特点:
(1)通过观察对比表中数据,检测到的受电弓动态参数均属于正常值,静态数据如受电弓静态压力、滑板最小剩余厚度均在规定值范围内,而且差距极小。
(2)对比弓网燃弧数据
被跟踪的动车组每台受电弓不同运行方式比较表明,3 车受电弓后弓开口运行优于前弓闭口运行,11 车受电弓前弓开口运行优于后弓闭口运行。
2 台同时工作受电弓比较表明,前弓优于后弓。
2 台受电弓不同运行方式下测量结果表明,11车受电弓作为后弓时的燃弧次数明显较多。
(3)图10~图13 给出了相同受电弓2 次跟踪测试结果的燃弧分布对比图。从图中可以看出:
3 车受电弓5 月份测量结果优于1 月份。
11 车受电弓作为前弓时,5 月份测量结果优于1 月份。作为后弓时,5 月份的测量结果不如1 月份。而且1 月份11 车受电弓滑板厚度已超过最小24 mm 的限值,因此滑板磨耗不是影响弓网燃弧变化的主因。
从目前跟踪测试结果和测试数据来看,造成被跟踪动车组的11 车受电弓后弓闭口运行时受流性能较差,这值得更深入研究。
7 结 论
为了填补国内对服役动车组弓网受流性能变化规律研究的空白,解答车辆部门关心的动车组受电弓服役性能变化情况,开发了一套实用的服役动车组弓网受流性能跟踪测试系统,通过车载弓网监控视频离线实测弓网燃弧、受电弓横向摆动和动态抬升量参数。为服役动车组弓网受流性能跟踪测试提供了技术支持。该方法具备以下优势:
(1)利用图像测量参数,数据准确,信息丰富,输出结果直观。
(2)通过先验知识和计算机视觉算法,可以准确地采集燃弧图像和受电弓动态包络线参数。
(3)充分利用了车载的弓网监控视频,测量手段安全、经济、实用,大大降低长期跟踪试验成本。
猜你喜欢
铁道机车车辆(2021年5期)2021-11-19 09:24:12
测控技术(2018年8期)2018-11-25 07:42:30
机械管理开发(2018年6期)2018-07-06 07:08:46
铁道科学与工程学报(2018年4期)2018-04-26 03:44:51
时代农机(2018年12期)2018-02-14 06:07:22
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:42
上海铁道增刊(2017年2期)2017-04-18 06:50:30
电气化铁道(2016年4期)2016-04-16 05:59:44
铁道科学与工程学报(2015年5期)2015-12-24 12:12:04
电气化铁道(2014年1期)2014-11-27 02:54:51