变构型陆空平台动态起降轨迹规划研究
2022-07-13 02:18魏巍范康迪王若琳赵默雷赵之然王剑峰
北京理工大学学报 2022年7期
魏巍,范康迪,王若琳,赵默雷,赵之然,王剑峰
(1. 北京理工大学 车辆传动国家重点实验室, 北京 100081;2. 北京理工大学 重庆创新中心, 重庆 401120;3. 北京千方创新科技有限公司, 北京 102299)
陆空平台具有行驶时续航时间长的优点,也具备飞行时的高通过性. 许多国内外学者设计了不同构型的陆空平台,有飞行与行驶机构独立驱动且不可变形的陆空平台,如南安普顿大学的SuperB[1]和清华大学的“猛狮”[2];有飞行机构提供行驶动力的陆空平台,如伊利诺伊理工大学的HyTAQ[3];有飞行机构可偏转的陆空平台,如北京理工大学设计的变构型陆空平台[4-5]和瑞典的Linnaeus 概念平台[6]. 陆空平台的多域机动能力使其能在隧道巡检、灾区搜救等复杂场景应用,陆空平台静态起降时存在多次减速停止的情况,而动态起降具有连续机动能力,为满足陆空平台机动性能方面的要求,需要对动态切换的轨迹基于时间进行优化.
国内外许多学者对移动机器人轨迹规划进行了研究. 牛国臣等[7]采用两次改进的5 次多项式进行规划,避免与物体的碰撞. 王莹等[8]针对可动边界问题,通过选定一系列终点候选位置,利用三次多项式拟合路径,最终根据目标函数选取最优轨迹. 唐刚等[9]在目标函数中添加走廊约束,并建立偏离评估函数,基于最小snap 方法生成接近直线的轨迹. 张洲宇等[10]定义时间、航程和燃料的多目标函数,基于二次贝塞尔曲线规划无人机轨迹.
目前陆空平台对飞行与行驶状态研究较多,针对陆空模式的转换研究较少. 为探究陆空模式转换的机动性问题,规划静态切换与动态切换两种陆空切换模式的轨迹,对比两者时间证明动态切换的高机动性,设计飞行控制器验证动态切换轨迹的可控性.
1 飞行动力学模型
变构型陆空平台如图1 所示,飞行模式下,4 个空用电机驱动旋翼提供升力,涵道提供附加升力.行驶模式下,4 个陆用电机驱动涵道提供行驶动力. 陆空切换模式下,2 个舵机带动涵道旋翼进行偏转. 此构型冗余质量较小,飞行升力高,旋翼安全性好.

图1 变构型陆空平台示意图Fig. 1 Schematic of deformable aerial-ground platform
1.1 坐标系建立
地面坐标系即惯性坐标系为Oxyz,机体坐标系为Obxbybzb,如图2 所示.
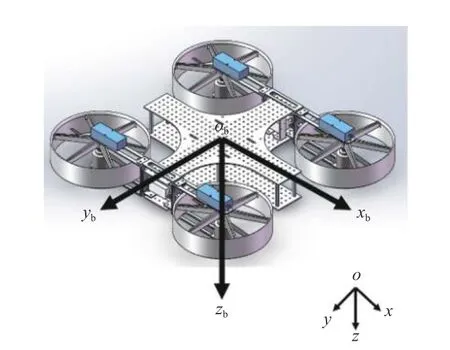
图2 坐标系Fig. 2 Coordinate system
1.2 受力分析
对模型做出如下假设:
①陆空平台为刚体.②质量为常数,重心位置不变.
③陆空平台只受重力和旋翼拉力.
④地面为惯性参考系.
基于牛顿-欧拉方程,有:
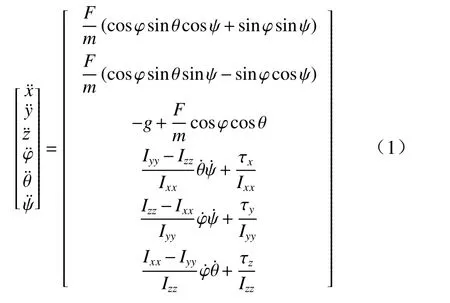
式中:F为在机体坐标系zb轴的旋翼总拉力;m为陆空平台质量;g为重力加速度; φ为滚转角; θ为俯仰角;ψ为偏航角; τx、 τy、 τz分别为xb、yb、zb轴力矩;Ixx、Iyy、Izz分别为陆空平台沿xb、yb、zb轴的转动惯量;转动惯量与偏转角的关系如图3 所示.
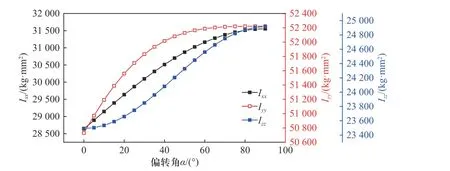
图3 随偏转角变化的转动惯量曲线Fig. 3 Moment of inertia curve varying with deflection angle
陆空平台所受拉力F、力矩 τx、 τy、 τz与4 个飞行电机转速 ω1、 ω2、 ω3、 ω4的关系为
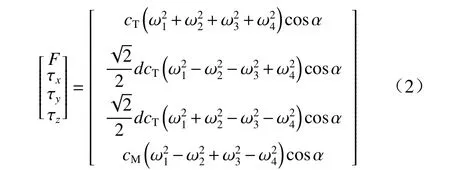
式中:cT为旋翼的升力系数;cM为旋翼的转矩系数;α为涵道偏转角;d为旋翼质心到机体质心的距离.
2 动态切换轨迹规划
陆空平台的动态切换为Obxbzb内的二维平面运动,y方向位移与偏航角 ψ不变,因此规划目标为平面位置x、z和偏转角 α.
研究由陆到空的模式切换如图4 所示.
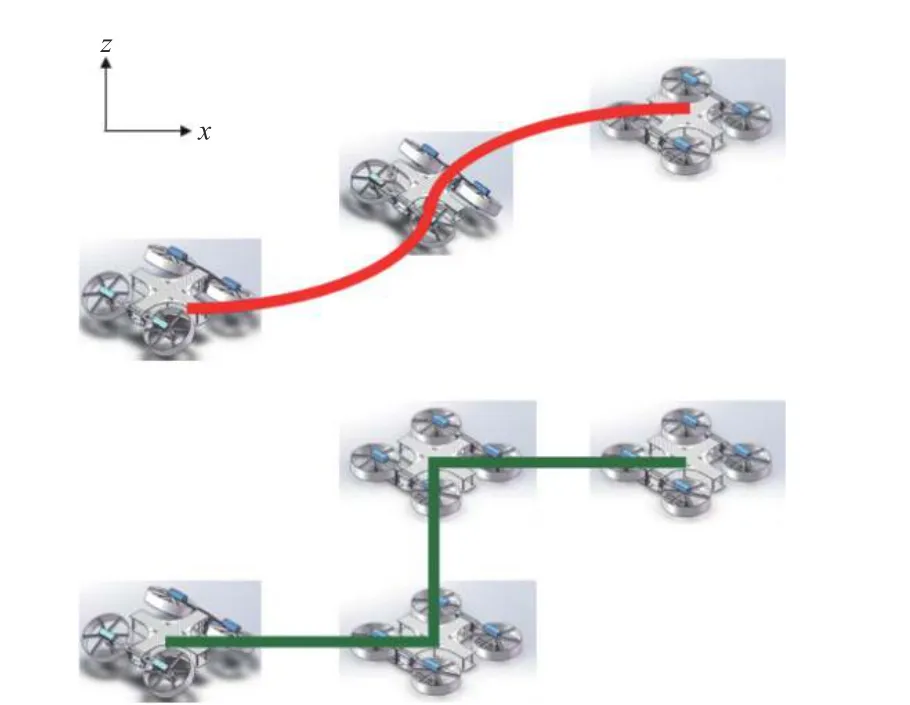
图4 陆空动态切换与静态切换示意图Fig. 4 Schematic diagram of dynamic and static switching between land and air
2.1 目标函数
当目标飞行高度h已知,陆空切换终点在水平直线上变动,对于右端可动边界点,通过将可动边界在(0,xmax)内离散化,获得终点的数据点集,对所有边界点进行轨迹拟合,采用目标函数筛选最优轨迹. 轨迹规划的目标函数J为动态切换相对静态切换所减少时间占静态切换时间的比例.

式中:tj为静态切换时间;td为动态切换时间.
2.2 动态切换
假设动态切换轨迹规划在x方向以速度vx匀速运动,起飞时偏转角为α(t=0),飞行的目标高度为h,则边界条件如下:
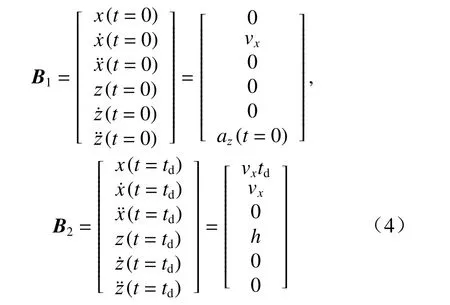
当偏转角变化时,陆空平台的最大升力随之改变,因此,动力学约束与偏转角存在耦合关系. 将轨迹分为两段,偏转角在前1/p时间内完成涵道偏转角从α(t=0)到0°的变化过程,后一段时间偏转角保持0°不变,从而实现偏转角 α和平面位置x、z的分层规划.
设涵道偏转角随时间变化的函数为一次函数,则

偏转角0°时高度方向最大加速度为azmax,则动力学约束为

基于5 次多项式,分别在x和z方向表示动态切换轨迹函数.

由此可得

2.3 静态切换
静态切换边界点与动态切换一致,其轨迹分为3 段:行驶减速段、飞行上升段和前飞段. 行驶减速段以最小行驶加速度a′xmin从vx减速到0,假设减速段时间为tj1,然后以tj2的时间使涵道偏转至水平. 飞行上升段若高度h较低,则前半段以z方向最大加速度飞行,后半段以z方向最小加速度减速飞行至高度h悬停,假设上升段时间为tj3. 前飞段前半段以x方向最大加速度飞行,当加速到vx时匀速前进,假设前飞段时间为tj4. 综上,静态切换时间tj=tj1+tj2+tj3+tj4.
2.4 轨迹规划流程
在陆空转换的过程中,陆空平台的终点(x,h)为可动边界,规划过程中以J为目标函数,针对x、h进行优化,轨迹规划的流程如图5 所示.
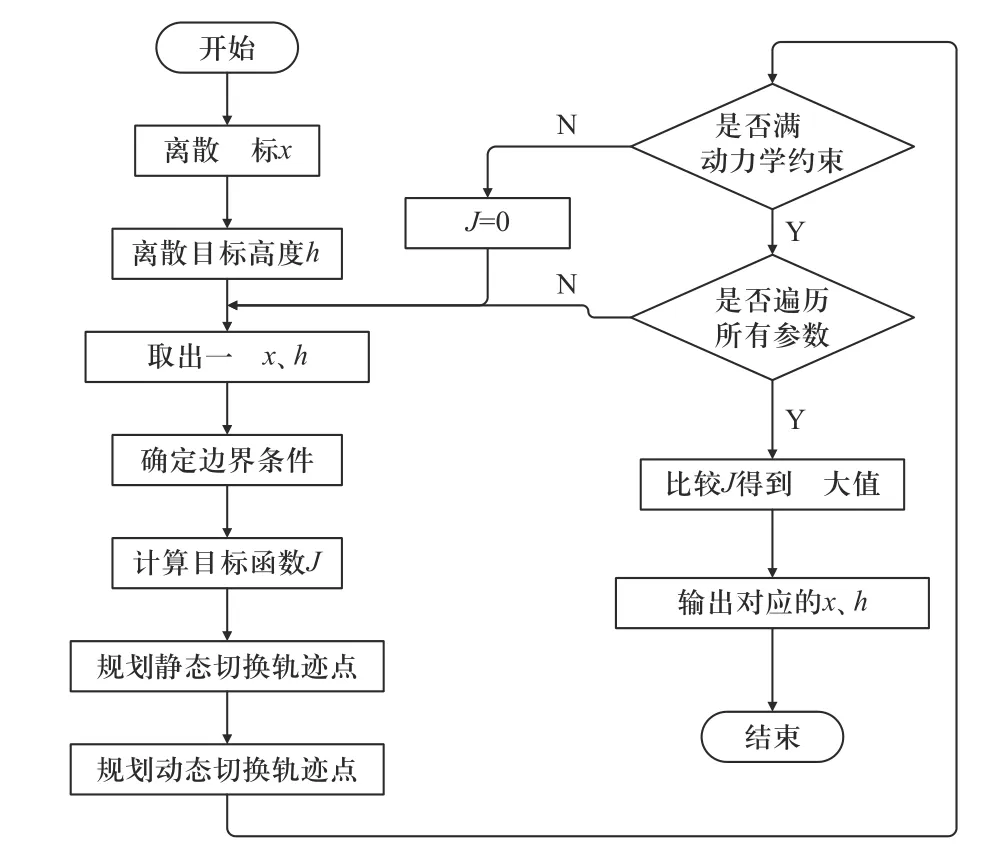
图5 轨迹规划流程图Fig. 5 Trajectory planning flowchart
3 仿 真
基于Matlab 规划动态切换轨迹,基于Simulink搭建陆空平台的控制器与模型,以动态切换轨迹作为控制器输入,进行轨迹跟踪控制仿真. 给出关键参数如表1 所示.
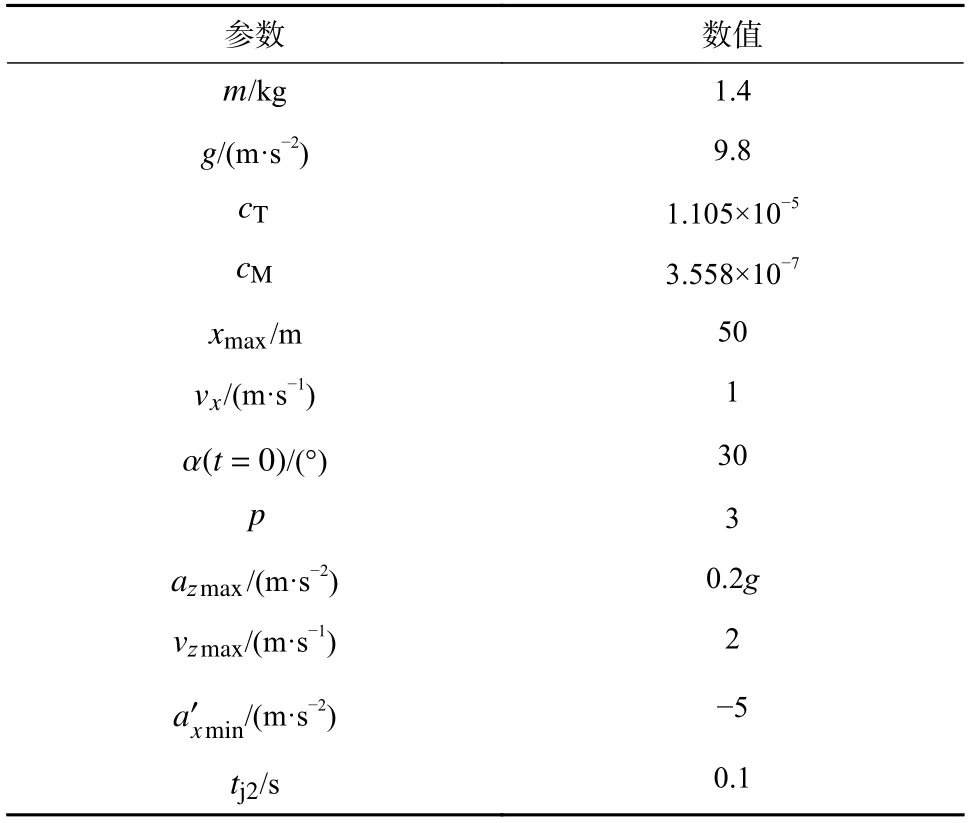
表1 关键参数Tab. 1 Key parameters
3.1 动态切换轨迹规划仿真
轨迹规划仿真结果如表2 所示.
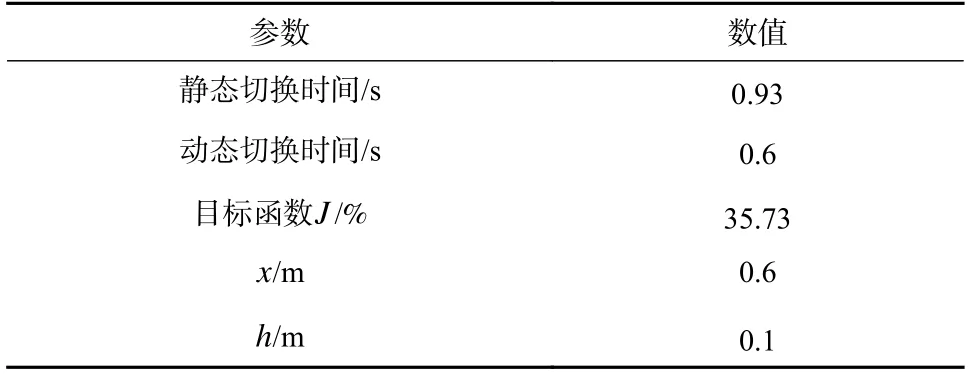
表2 仿真结果Tab. 2 Simulation results
如图6 所示,可以看到目标函数J随轨迹终点坐标x和h的变化趋势,J=0的直线段表示不符合动力学约束,忽略该直线段,那么J随x增长呈现出下降的趋势. 当x=6 m 不变时,J随h的增长而增长. 但当h增加时,J随x变化曲线中J的最大值随之减小,即max(J(x))随h增加而减小,因此,当轨迹规划追求J的最大值时,将规划得到h=0.1 m(h离散时的最小值)时的轨迹,在实际陆空转换中h并不是越小越好,考虑室内应用场景,选择h=1.5 m作为输入参数进行轨迹规划.
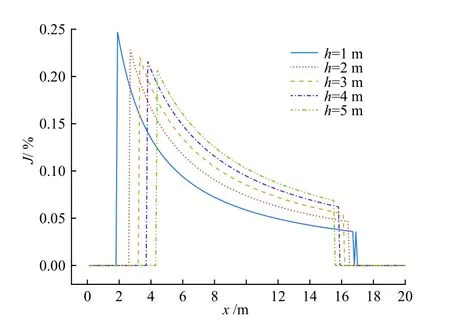
图6 J 随x、h 变化的关系图Fig. 6 The relationship diagram of J with x and h
如表3 所示,相比静态切换,动态切换时间缩短了23.02%,仿真表明动态切换相比静态切换具有更好的机动性.

表3 h=1.5 m 时的仿真结果Tab. 3 Simulation results when h=1.5 m
如图7 和图8 所示,动态切换轨迹平滑,加速度连续变化,加速度曲线符合动力学约束和边界条件.
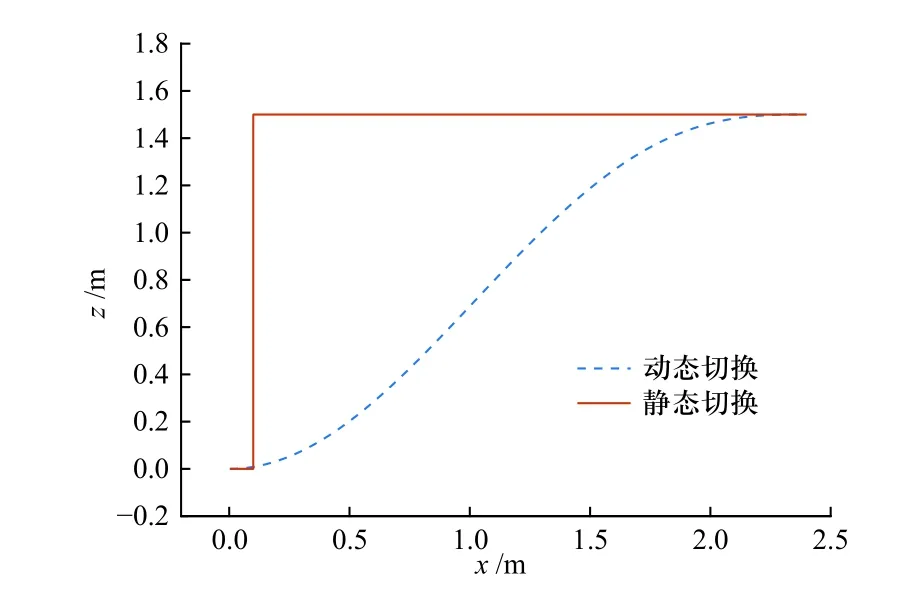
图7 飞行路径Fig. 7 Flight path

图8 动态切换时z 向加速度曲线Fig. 8 z-direction acceleration curve during dynamic switching
3.2 动态切换轨迹跟踪控制仿真
基于PID 算法[11]设计陆空平台的飞行控制器,对动态切换轨迹跟踪控制,控制框图如图9 所示.
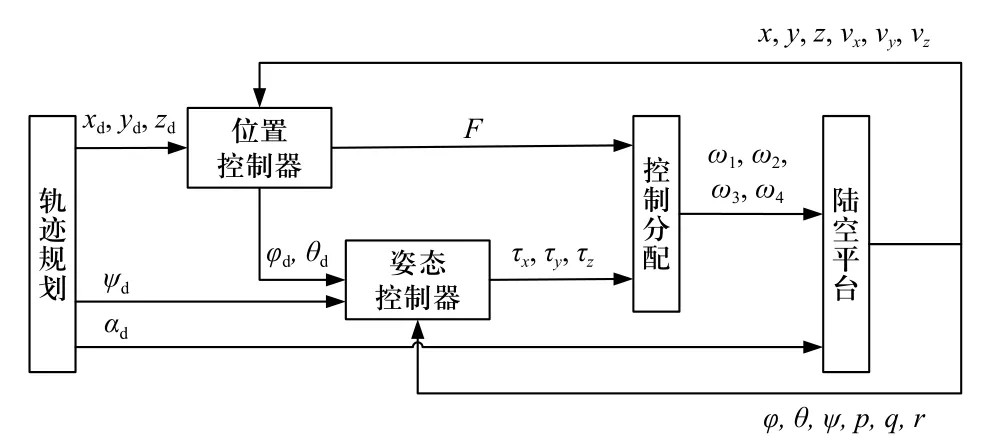
图9 轨迹跟踪控制框图Fig. 9 Trajectory tracking control block diagram
位置与姿态控制器采用双闭环结构,外环为P控制器,内环为PID 控制器. 首先调试姿态控制器,然后调试位置控制器,直到具有较好的控制效果,各通道控制器参数如表4 所示.
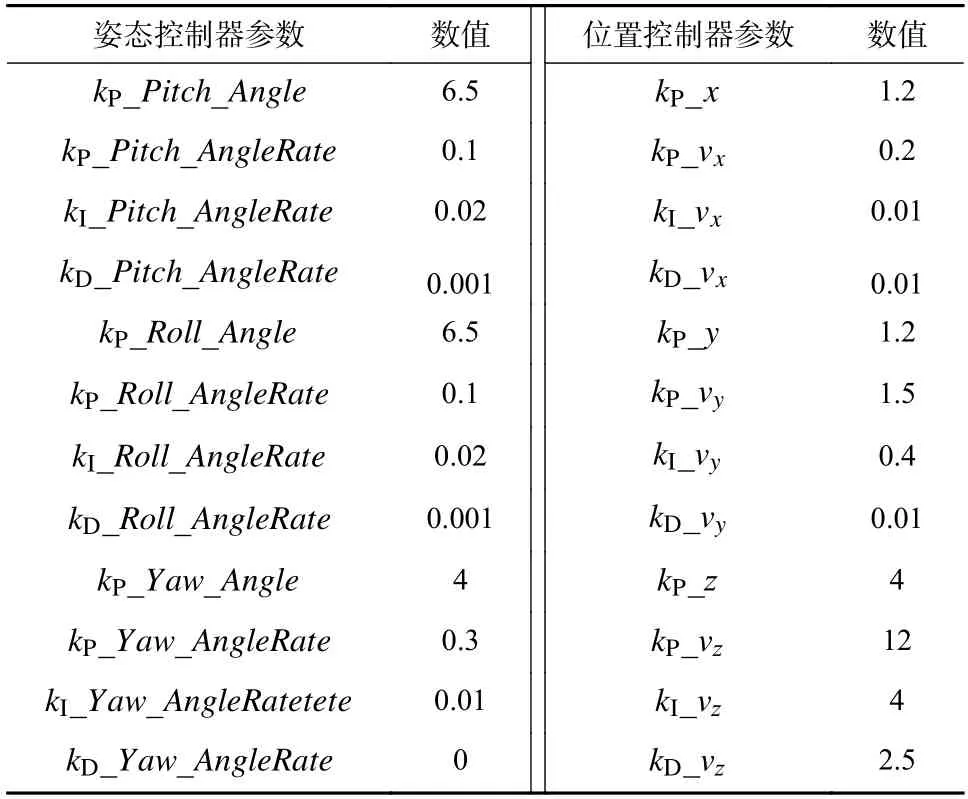
表4 控制器参数Tab. 4 Controller parameters
如图10 所示,实际飞行轨迹较为平滑,与期望轨迹误差较小,且在终点处基本无超调,控制器的跟踪控制效果较好.
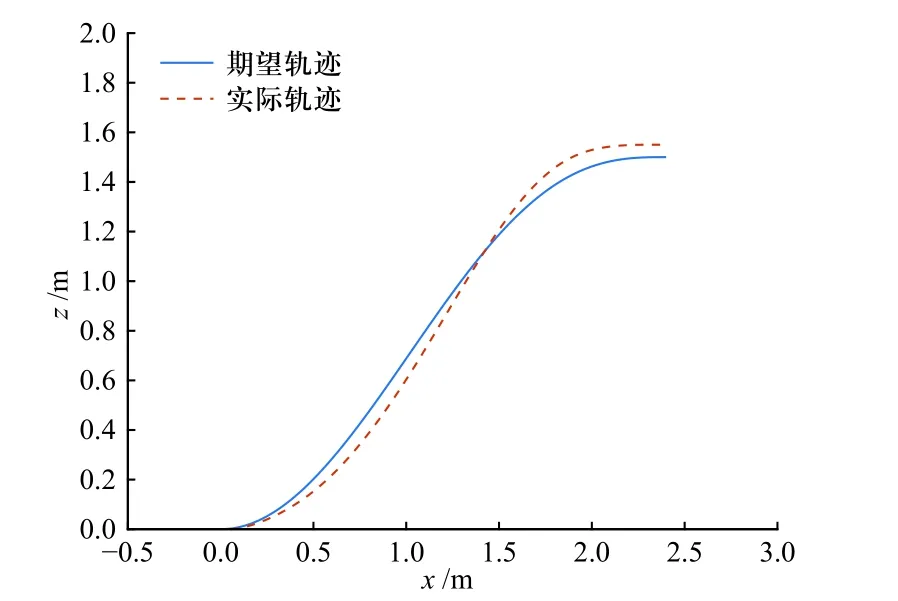
图10 PID 轨迹跟踪控制Fig. 10 PID trajectory tracking control
4 结 论
通过对陆空平台陆空模式静态切换和动态切换进行轨迹规划,并设计PID 控制器对动态切换轨迹跟踪控制,结论如下:
采用5 次多项式规划动态切换轨迹,规定静态切换运动方式,仿真表明当h不 变时,目标函数J随x增加而减小;当x不变时,目标函数J随h增加而增加;J随x变化曲线中J的最大值随h增加而减小;当高度h=1.5 m时动态切换时间相比静态切换时间缩短了23.02%.
通过PID 控制方法设计陆空平台飞行控制器,仿真表明能较好地跟踪动态切换轨迹.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
当代水产(2022年6期)2022-06-29
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年9期)2021-11-02
直升机技术(2021年2期)2021-06-17
科技创新与应用(2020年10期)2020-04-24
阅读(低年级)(2019年4期)2019-05-20
金桥(2018年4期)2018-09-26
魅力中国(2018年5期)2018-07-30
航空模型(2017年3期)2017-07-28