一种小型警用无人机的装配与训练方法
2022-07-12 04:53李文广甄智明贺津
微型电脑应用 2022年5期
李文广, 甄智明, 贺津,
(1. 陆军工程大学石家庄校区, 河北, 石家庄 050051; 2. 石家庄市公安局, 河北, 石家庄 050051)
0 引言
自2015年公安部明确提出“将警用无人机纳入警用航空管理范畴,建立管理、运行和安全工作规章制度”以来,警用无人机在各级警务单位、各类警务工作中发挥着举足轻重的作用[1-2]。
但随着大量警用无人机装备配发各级警务单位,警务人员缺乏熟练操控技能的问题也愈加突出。一方面,警用无人机操控培训依赖于无人机厂商,培训周期短,不能很好地兼顾所有操控人员的需求;另一方面,公安院校缺乏完整的无人机培训体系,各级警务单位也没有健全的配套训练条件[3]。所以,如何立足于各级警务单位的训练条件,建立科学完善的警用无人机操控训练体系及方法是值得探索与研究的。
为解决上述问题,本文提出了一种小型警用无人机装配与训练方法,采用“装配训练、虚拟训练、实飞训练”相结合的训练方法,从不同角度、不同层面培养操控人员的操控技能和技巧,这种方法有效满足了日常警用无人机飞行训练。
1 无人机装配训练
无人机装配训练侧重于培养操控人员对于警用无人机各组件的认识,掌握各组件的功能及线路的连接,主要包括机架组装、线路焊接及飞控装机3个部分[4]。
1.1 机架组装
无人机机架作为骨架部分,起到了支撑整个无人机飞行器和为各部件提供安装位置的重要作用,是无人机必不可少的部件之一。
以一款塑料材质的旋翼无人机机架为例,此款机架共有4个机臂,分红、黑、白3种颜色可选。应选择同种颜色的一对机臂作为机头侧机臂,选择另一种颜色作为机尾侧机臂,便于操控人员通过识别机臂颜色来区分机头和机尾方向。旋翼无人机机架由4个机臂、1个上中心板和1个下中心板所组成,各部分如图1~图3所示。
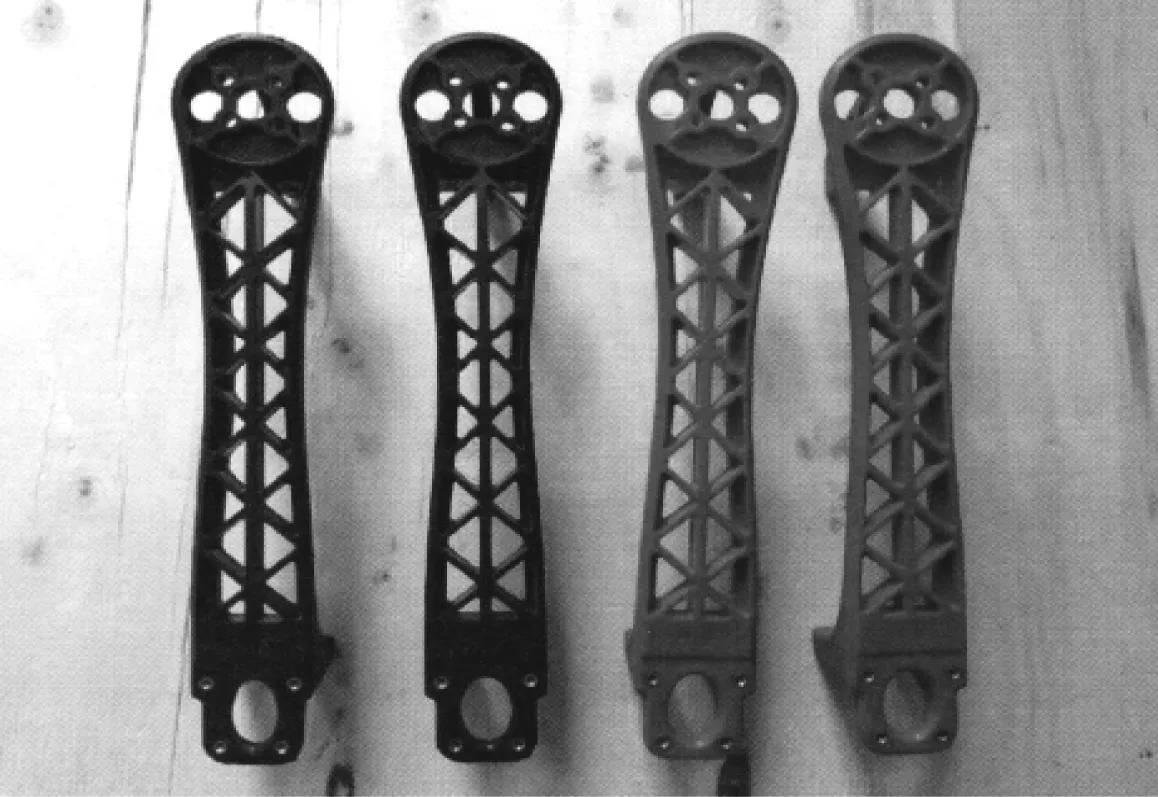
图1 机臂

图2 上中心板
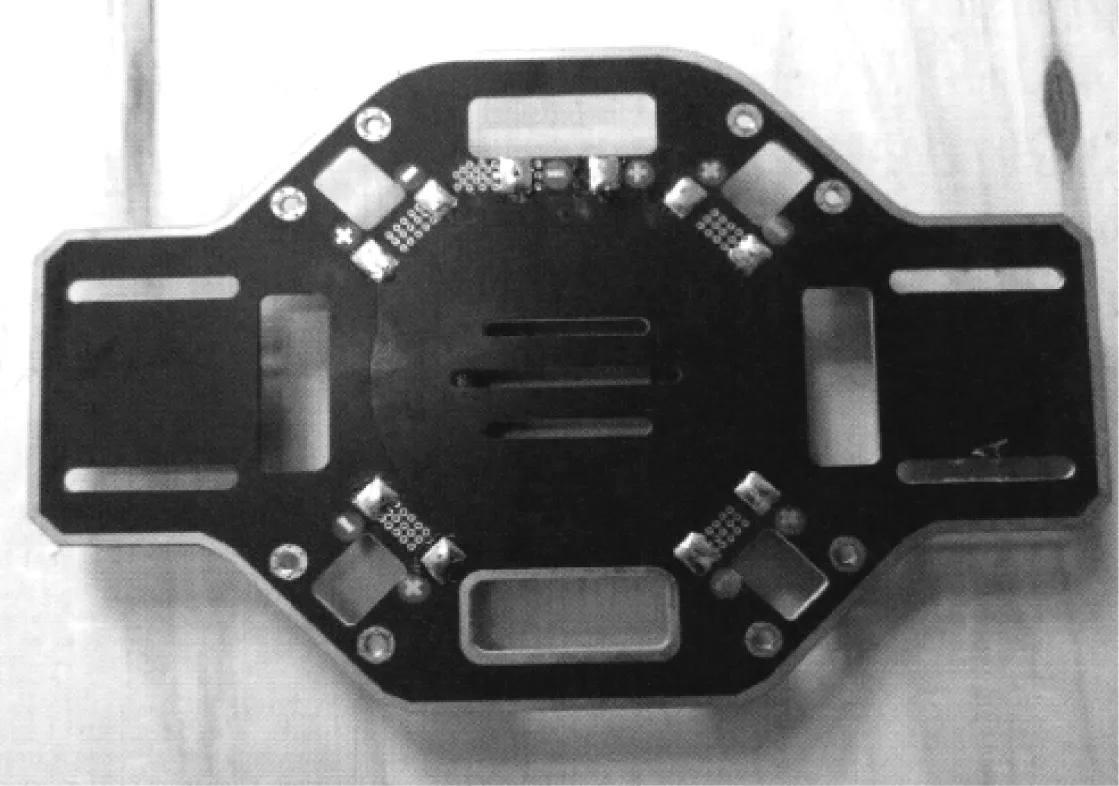
图3 下中心板
在机臂的一侧和上中心板的4个边角位置均设有金属螺绞孔,可通过螺丝将4个机臂固定到上中心板上,把螺丝垂直对正螺丝孔,螺丝拧到适合的紧度即可。图4为4个机臂与上中心板安装完成后的样子,红色机臂为机头方向,黑色机臂为机尾方向。
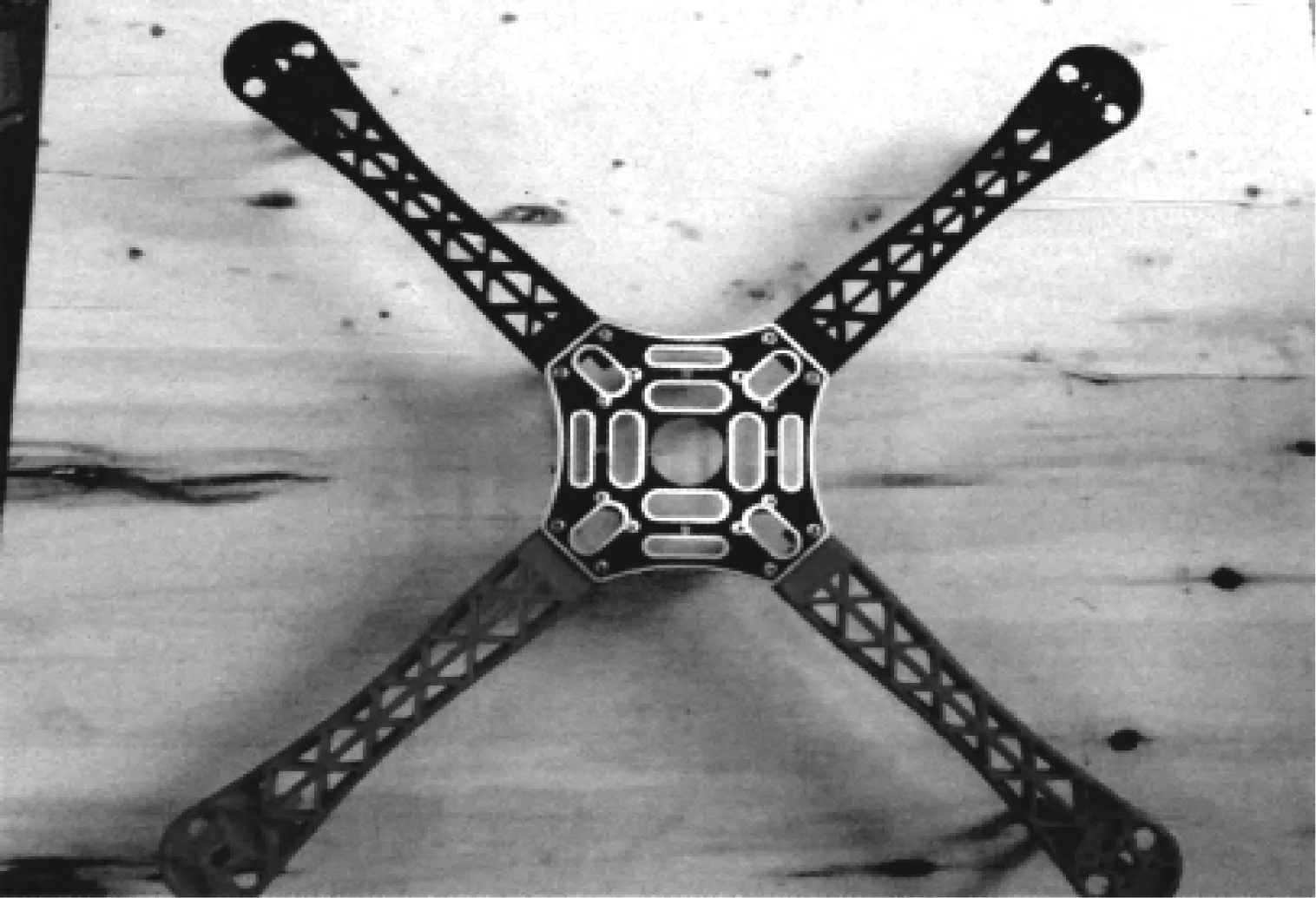
图4 机臂安装完成
机臂与上中心板安装完成后,还需将下中心板、脚架和已经安装好的机臂安装固定在一起。图5为最终机架安装完成的模样。

图5 机架安装完成
1.2 线路焊接
线路焊接主要包括电调焊接和电源供电线焊接2个部分。
(1) 电调焊接
电调焊接分为两种:一种是直接焊接到下中心板的焊点上;另一种是将电调的正极线焊接到一起,将负极线也焊接到一起。第二种方法适用于不带焊点的机架,也可通过一块分电板用来焊接电调供电线。
以中心板自带焊点及走线的机架为例,应是直接将电调焊接在下中心板上。电调的供电线分为红黑和白黑2种,其中红色或者白色线表示电调的正极,要焊接到符号为“+”的焊点;黑色线表示负极,要焊接到符号为“一”的焊点。机架下中心板内分布有正负2种焊点:标有“+”号的焊点用于与电源的正极或电调的正极线相焊接;标有“一”号的焊点用于与电源的负极或电调的负极线相焊接。将对应颜色的电调供电线焊接在下中心板对应符号的焊点上即可。
(2) 电源供电线焊接
焊接时先在插头焊点和电源线上镀锡,将红色正极电源线与XT60电源插头上带有“+”号的焊点焊接在一起,将黑色负极电源线与XT60电源插头的“一”号焊点焊接在一起,然后使用热缩管将裸露的焊点包裹起来。
在下板焊点和电源线另一端上镀锡,将焊好电源插头的电源线焊接到下中心板对应的供电焊点上。红色正极线焊接在带有“+”号的焊点上,黑色负极线焊接到带有“一”号的焊点上。焊接好的电源线如图6所示。

图6 与下中心板焊接好的电源线
1.3 飞控装机
飞控作为无人机的核心部件,其安装分为飞控板安装和连线安装两部分。
(1) 飞控板安装
飞控板安装于无人机机架的中心位置,安装飞控板之前要先将飞控减震支架用3M双面胶固定在机架的上中心板的正中心。安装完飞控减震支架后再将飞控板用3M双面胶固定在减震支架上。需要注意的是飞控板上标注的机头方向应与机架机头方向相对应且飞控板中心要与机架上中心板重合。
(2) 连线安装
安装完APM飞控之后,需要按照相应的接线规则连接飞控与电调以及飞控与遥控器的接收机。具体要根据飞控、电调、接收机的使用说明。
2 无人机虚拟训练
无人机虚拟训练主要借助模拟器来完成,模拟器的飞行数据完全来自真机,可以获得和操控真机一样的操控体验[5]。Phoenix RC模拟器包含上百种固定翼和无人直升机模型,5.5版本还可以在线更新下载DJI精灵四轴无人机模型,可以自由选择飞行场景、飞行时的天气状况等,功能强大。下文以Phoenix RC模拟器为实例进行警用无人机虚拟训练[6]。
2.1 单通道虚拟训练
(1) 仅升降舵悬停训练
在模拟器上方菜单中选择训练模式下的悬停训练,在设置菜单仅选择升降舵,这时遥控器上只有升降舵有效,先在方向菜单选择后面(代表操控者站在无人机后方,即对尾)通过控制升降舵实现无人机悬停,完成对尾仅升降舵后再完成对头(即操控者站在无人机机头前方)和对侧(即操控者站在无人机的侧面)的悬停训练。
(2) 仅副翼悬停训练
在悬停训练设置菜单中选择副翼,这时遥控器上只有副翼舵有效,在方向菜单中先设置为后面即对尾,通过控制副翼,实现飞机恳停。完成对尾仅副翼舵后再完成前面(对头)和侧面(对侧)的悬停训练。
2.2 双通道虚拟训练
双通道即升降通道和副翼通道同时开放,跟单通道相比,需要同时兼顾无人机机头前后左右4个方向的稳定,难度较大。在双通道训练中,升降舵和副翼舵的操控方法都是相同的,唯一不同的是需要同时操控这2个舵杆。
在上方菜单中选择悬停训练,在设置菜单中选择升降舵+副翼,即双通道悬停训练,这时遥控器的升降舵和副翼舵同时有效,通过控制升降舵和副翼舵,实现飞机稳定悬停。完成对尾(后面)的双通道悬停训练后再完成对头(前面)和对侧(左边和右边)训练。
2.3 全通道虚拟训练
在完成单通道和双通道虚拟训练后,升级训练即为全通道虚拟训练。此时开放了操控无人机的所有通道,包括升降舵、副翼舵、方向舵、油门舵以及其他开关通道。在模拟器中一般只涉及操控无人机运动的4个舵杆,经过前期训练,飞手已经掌握了2个舵杆同时协调操控的方法,基本养成了压舵的操控方式。
全通道对尾悬停可以训练操控者基本的操控方法,主要训练飞手升降、副翼、方向和油门4个舵位间的协调以及打舵能力,锻炼飞手对于操控无人机的快速反应能力,完成全通道对尾悬停,意味着无人机操控正式入门。当然,对于全通道虚拟训练还可以进行8位悬停等其他复杂操作,进一步提升操控能力。
3 无人机实飞训练
完成无人机装配训练和虚拟训练后,可利用自行装配的无人机进行实飞训练。利用实飞训练,掌握警用无人机训练流程的组织与实施[7]。
3.1 地面检查调试
(1) 对频检查
遥控器接收机和发射机初次使用或者更换接收机时,发射机需要与新的接收机进行对频才能正常使用[8]。
将发射机和接收机保持在50 cm距离以内,并打开发射机电源。双击触摸传感键LNK并选择SYSTEM,然后按下RTN键,在关联菜单(LINKAGE MENU)中打开系统(SYSTEM)界面。在FASSTest14CH之后选择使用的接收机数,因为这里只使用一个接收机,所以选择SINGLE。
动触摸传感键选择LINK并按下RTN键,发射机会发出滴滴声表示已经进入对频模式。进入对频模式后,应立刻打开接收机电源,约2 s后,接收机进入等待对频状态(等待大概1 s左右)。接收机的LED指示灯从闪烁到绿灯长亮,则表示对频完成,如图7所示。
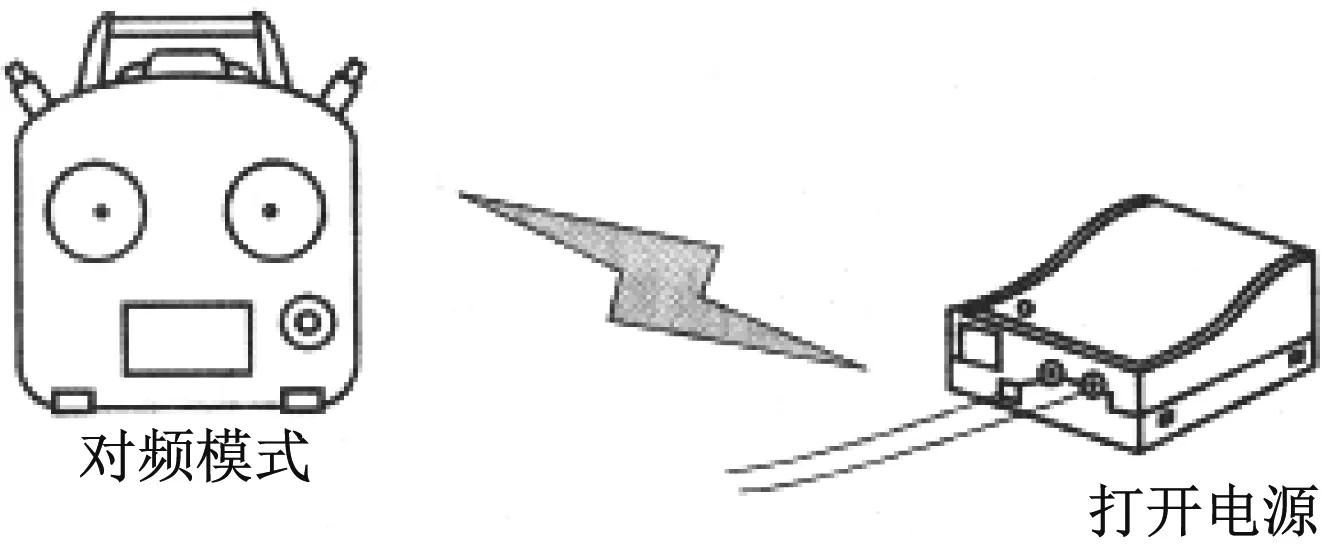
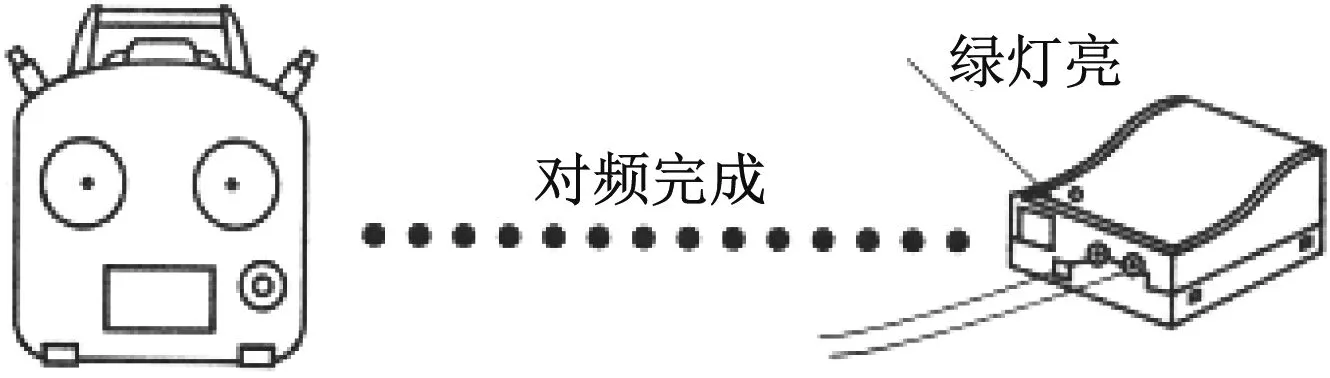
图7 对频完成
(2) 通电检查
① 检查机架外观是否完好,有无螺钉松动、脱落情况。
② 通电时不要晃动穿越机,直到电调自检结束,电机发出连续3次短“滴”声和一次长“滴”声表示检测电池为3SIP。
③ 掰杆解锁飞控。
④ 轻推油门,观察4个电机转向和转速是否一致。
⑤ 持低油门使穿越机不离开地面、螺旋桨低速旋转,观察现象是否一致。
3.2 飞行操控训练
以8字飞行为例,完成对旋翼无人机操控的综合训练。
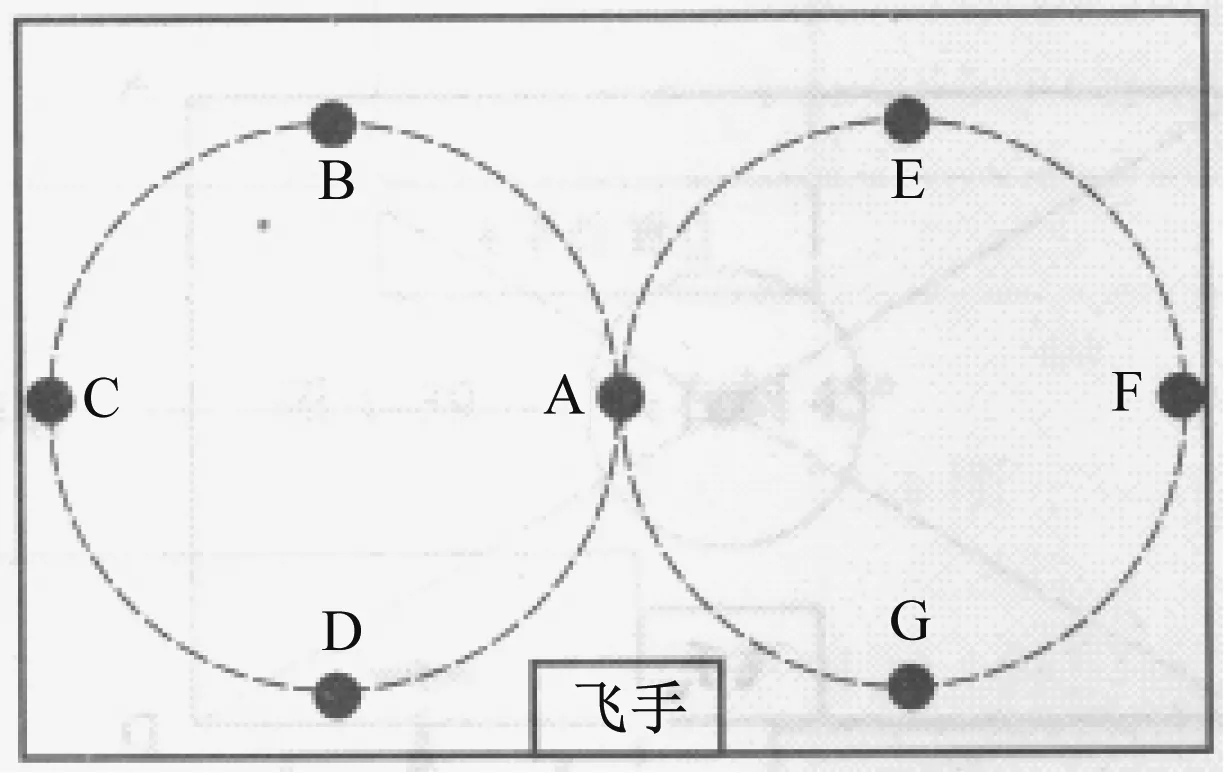
图8 8字飞行航线示意图
将穿越机对尾悬停于A点,由A点飞往B点,到达B点时穿越机姿态为左对侧;由B点飞往C点,到达C点时穿越机姿态为对头;由C点飞往D点,到达D点时穿越机姿态为右对侧;由D点飞回A点,到达A点时穿越机姿态为对尾。由A点飞往E点,到达E点时穿越机姿态为右对侧;由E点飞往F点,到达F点时穿越机姿态为对头;由F点飞往G点,到达G点时穿越机姿态为左对侧;由F点飞回A点,到达A点时穿越机姿态为对尾。
以上8字飞行需要升降舵、油门舵、方向舵和副翼舵4个舵之间的协调控制,对飞手的操控技术有很高的要求。其技巧在于注意控制穿越机前进的速度,除了前面提到的匀速外还得保持低速,只有缓慢前进的速度才能给操控者充分的反应时间去调整穿越机的旋转速度以及角度或者去打副翼纠正穿越机的侧滑偏移。
8字飞行是无人机驾驶员考证内容之一,通过完成对操控人员的8字飞行操控训练,可全面考察飞手的操控能力,锤炼操控人员的飞行技能。
4 训练考核
在完成各个阶段训练任务后,应按照一定考核标准对操控人员的操控能力进行考核验收,并通过考核表现制定下一阶段训练计划[9]。
从降落精度、降落稳定等角度,建立如下评分考核指标。
(1) 飞行性能
飞机有明显毁损或上电后出现事故:0分;
飞机外观完整,但解锁后飞机无反应:视程度打分范围1~3分;
飞机外观完整,解锁后飞机有反应,但无法正常起飞:视程度打分范围4~7分;
飞机外观完整,解锁后飞机有反应,且能够正常起飞:视程度打分范围8~10分。
(2) 飞行稳定度
飞机晃动幅度较大且无法控制:0分;
飞机晃动幅度较大但能够控制:视程度打分范围1~15分;
飞机晃动幅度较小且能够控制:视程度打分范围16~30分。
(3) 飞行熟练度
飞机持续落在绿圈外(参见图9)且无法调回:0分;

图9 考核精度划分
飞机基本在绿圈内,但高度变化幅度较大:视程度打分范围1~4分;
飞机基本在绿圈内,且高度变化幅度较小:视程度打分范围5~8分;
飞机基本在黄圈内,但高度变化幅度较大:视程度打分范围6~10分;
飞机基本在黄圈内,且高度变化幅度较小:视程度打分范围11~14分;
飞机基本在红圈内,但高度变化幅度较大:视程度打分范围12~16分;
飞机基本在红圈内,且高度变化幅度较小:视程度打分范围17~20分。
(4) 降落稳定度
降落过程机身或螺旋桨有损坏:0分;
降落过程晃动厉害,但无明显损伤:视程度打分范围1~10分;
降落过程无明显晃动,降落较为平稳:视程度打分范围11~20分。
(5) 降落精确度
飞机落在绿圈以外:0分;
飞机基本落在绿圈内:视程度打分范围1~3分;
飞机基本落在黄圈内:视程度打分范围4~6分;
飞机基本落在红圈内:视程度打分范围7~9分;
飞机完全落在红圈内:10分。
(6) 加分项
未完成“对侧”和“对头”飞行:0分;
仅完成空中“对侧”稳定飞行:视程度打分范围1~4分;
仅“对头”稳定飞行:视程度打分范围1~6分;
完成空中“对侧”和“对头”飞行:视程度打分范围4~10分;
注:“对侧”和“对头”飞行时间各15 s,稳定性以绿圈为准。
5 总结
本文提出了一种小型警用无人机装配与训练方法,各警务单位可立足于现有训练条件,开展警用无人机操控训练,进一步提高警务人员操控水平。
(1) 装配训练主要是培养操控人员对于无人机各组件的认识,更深入了解无人机性能及技术特点。
(2) 虚拟训练先通过单通道训练、双通道训练,而后升级至全通道训练,逐步提升操控人员对于无人机的操控,形成良好的操控习惯,为下一步实飞训练打下坚实基础。
(3) 实飞训练重在掌握组织实飞的全流程,可参考无人机驾驶员考证内容,全方面培养操控人员素养。
(4) 通过建立的训练考核指标体系,完成对训练成果的考核验收,为下一步制定训练计划提供依据。
猜你喜欢
中国工作犬业(2022年10期)2022-12-06
智能制造(2021年4期)2021-11-04
航空维修与工程(2021年9期)2021-10-18
民用飞机设计与研究(2020年1期)2020-05-21
科学导报(2019年71期)2019-12-16
民用飞机设计与研究(2019年2期)2019-08-05
航空学报(2019年4期)2019-04-22
环球时报(2017-08-01)2017-08-01
航空模型(2016年10期)2017-05-09
科技创新导报(2017年1期)2017-03-21