
圆形阵列无线传感器的鸟鸣声检测方法∗
2022-07-07 07:23张巧花
应用声学 2022年3期
张巧花 张 纯
(中国科学院声学研究所 北京 100190)
0 引言
鸟类是一种对生态环境和全球气候变化极为敏感的指示性生物,其数量变化及多样性等特征直接反映栖息地的生态系统平衡程度,是一个良好的环境质量评价指标[1−2]。鸟类通过鸣叫声进行通讯、求偶等,鸟鸣声包含着丰富的生物学信息,在不同属或种间鸣声特征具有差异性,是鸟类物种识别的重要依据[3−5]。对栖息地内的鸟类鸣声进行长期监测可以了解鸟类种群变化及迁徙规律,是监管保护鸟类的重要举措[6−8]。随着自然生态环境保护的不断加强,栖息地中重要鸟类迁徙的远程在线监测问题变得日益重要,特别是对珍稀濒危鸟类种群的保护及生态系统监测都具有重要意义。
在海岛及滨海湿地等特殊环境的自然保护区,鸟类的监测仍以传统的人工监测为主,通过架设望远镜、红外相机等进行视觉观察,人工携带录音设备进行声音采集,但这种传统方法观察范围小且效率较低,同时会对鸟类活动造成干扰。此外,当前的鸣声采集装置在潮湿环境下无法长时间工作,在低信噪比环境下拾声效果差,而且数据难以实时回传,达不到在线监测需求,适用性差。而基于阵列方法的非入侵式声学远程系统为鸟类活动生态监测提供了可行性,能在生态敏感区如自然保护区或难以进入的区域如大型芦苇栖息地进行长期的在线监测[9−13]。
为获得自然指向性的鸟鸣声增强信号,基于物联网开发了圆形阵列传感器系统。但在实际应用中,由于栖息地供电设施、网络等条件限制,为保障系统在野外长期稳定运行,针对鸟类一般在某些时间段内比较活跃,其他时间段只有少量鸟鸣声的情况,为了提升系统的可靠性、减轻数据传输负担及不必要的电能消耗,需要对有效鸣声数据段进行自动检测分段后再进行无线数据传输。常见的端点检测算法有基于时间参数平均值的决策参数,例如自相关系数、过零率或短期能量,这些方法虽然简单,但效果并不理想,一般只适用于高信噪比情况,且在复杂背景噪声低信噪比情况下难以获得理想结果,稳健性差[14−15]。本文提出了一种子带能量谱熵比的动态双门限信号端点检测算法,对仿真数据和海岛野外实验数据进行验证和分析,算法在复杂环境条件下依然能有效检测鸟鸣声信号端点。
1 圆形阵列无线传感器系统
1.1 传感器阵列设计
鸟类鸣声传感器阵列设计采用“6+1”的七元全向传声器作为基本阵列,阵型设计为圆形。其中6 个传声器阵元均匀等角度地分布在圆形板上形成半径为r的圆环,另一个传声器阵元布置在圆心用作信号参考,相邻阵元间距d=2rsin(π/M),其中M表示阵元数,则阵元m的空间位置表示为rm=(rcos(φm),rsin(φm),0),φm=(m−1)2π/M表示阵元m的圆心角。传声器阵元采用半波长布阵,国内大部分海岛鸟鸣声频谱在1 kHz~6 kHz之间,按照6 kHz 的半波长进行布阵,声音在空气中传播速度为340 m/s,则波长为

半波长λ/2=2.8 cm,即布阵阵元间距d=2.8 cm。
七元传声器阵列的阵元间距设计为30 mm,适当增大阵元间距有利于提升阵列的空间波束形成性能,且几乎不会产生空间混叠现象。圆形阵列安装在球形刚性金属结构内,如图1(b)所示。七元阵列接收信号通过采用波束形成处理能够抑制环境噪声增强鸣声信号,改善海岛野外复杂噪声下的鸟鸣声信号接收性能。

图1 圆形阵列无线传感器结构示意图Fig.1 Circular array wireless sensor structure
海岛及滨海湿地等栖息地中阵列无线传感器长期暴露在野外湿、热、盐、风、雨等环境下,既要对拾声传感器进行有效保护,又不能影响对声音的拾取。为了适应野外环境,传感器的结构采用球形刚性壳体设计,将硬件电路和数字式传声器阵列密封在壳体中,有效防止硬件电路系统被海岛高盐和潮湿环境侵蚀及减少野外风、海浪等噪声干扰,保证电路长期稳定运行。在球形壳体结构中间留有高8 mm 的传声器拾声窗口,声音经过窗口到达传声器阵列时满足平面波要求。球体下方的方形密封电路仓内放置信号采集处理电路和控制通信电路,刚性球形结构如图1所示。
1.2 球形结构的接收声场分析
刚性球形结构具有各向同性的特点,能够较好地利用球谐域傅里叶变换对频率信号和空间信号进行解耦,解决宽带相干信号定位问题,同时大大降低结构声散射对鸟鸣声拾取的影响,为了分析刚性球的声散射特性,将刚性球和非刚性球进行了对比。所谓刚性球就是圆球表面为刚性表面,计算声场分布时需考虑散射的影响,而非刚性球就是指虚拟球体,声波到达球体表面时无需考虑散射影响。假设单位平面波从某个方向入射后,非刚性球和刚性球情况下的模态强度函数bn(kr)满足[16]

其中,jn(kr)和j′n(kr)分别为n阶球贝塞尔函数及导数,hn(kr)和h′n(kr)分别为n阶球汉克尔函数及导数,k为波数,等于信号角频率与声速的比值,r为球体的半径。
仿真分析模态强度bn(kr)随kr的变化如图2所示,模态强度的变化将影响球面位置的对应频点声压。由图2可知,与非刚性球比较,bn(kr)在不同阶所关注的频点上不存在模态强度突然下拉的点,避免了噪声在该频点上被放大的问题。鸟类鸣声源的频率大部分集中在1 kHz~6 kHz 之间,本文所采用的刚性球的直径为114 mm,对应的kr为1.03~6.21 之间,因此采用刚性球有助于提高传感器的鲁棒性,避免模态强度在不同频率之间剧烈抖动。在结构的设计和制造过程中,非球形结构会产生各向一致性差的问题。因此,利用刚性球的散射特性,声信号进入接收窗时的各向一致性好,且对各频点模态相对平滑,有利于传声器阵列更好地拾取鸣声信号及后处理。

图2 不同阶下的模态强度值变化Fig.2 Modal strength variation in different orders
2 子带能量谱熵比特征鸣声段检测
2.1 原理与方法
子带能量特征检测方法通过比较特定子带(时域、频域或者其他变换域)内信号能量与设定阈值判决信号是否存在。子带谱熵将一帧鸣声分成若干子带,再求每一个子带谱熵。海岛野外噪声具有随机性和复杂性,这就降低了环境噪声对每一条谱线幅值的影响。相关研究表明,鸟鸣声信号的频谱基本集中在500 Hz~10 kHz 之间,大部分鸣声频谱在1 kHz~6 kHz 之间[17]。本文采用500 Hz~10 kHz的带通滤波器对数据进行降噪处理。
七阵元圆形阵列无线传感器系统采集的数据包含鸣声与噪声,鸟类活跃时间不固定,大部分时间段采集的是环境噪声。鸟类活动鸣声段检测及自动分段,是开展鸟类鸣声监测和生态学研究的基础[18]。鸣声端点检测通过从含有背景噪声的鸟鸣声信号中确定鸣声起止点,准确的端点检测能够提高鸣声识别的准确率。在语声信号处理领域,语声端点检测有两类方法:特征量-门限法和模型-分类器法[19−20],前者计算量小,实时性高。对于鸟类鸣声的实验研究表明,大多数鸟鸣声频谱存在明显的子带峰值[21−24],本文采用子带能量谱熵比为特征量,结合鸟鸣声特点实现鸣声信号端点检测,在低信噪比环境下算法端点检测有较好的鲁棒性,算法流程如图3所示。

图3 鸣声信号检测处理流程图Fig.3 Birdsong signal detection and process
在确保鸟鸣声信号不失真的情况下,经过阵元波束形成、预加重信号补偿等预处理后,选取鸟鸣声信号X(t)为处理片段,对信号X(t)进行汉宁窗加窗分帧后,数据帧长度为L毫秒,做N点傅里叶变换,帧重叠N/2点,预加重补偿后,对每一帧鸣声信号进行短时傅里叶变换,得到每帧信号的能量谱,其中第k条谱线频率分量fk的能量谱为|Xi(k)|2。
将一帧分成若干子带并求子带谱熵,假设每条子带有n条谱线,共有M个子带,第i帧中的第m条子带能量E(m,i)为

子带能量概率分布密度pb(m,i)和子带谱熵可分别表示为

利用能量和子带谱熵构成子带能量谱熵比,为提高鸟鸣声信号和环境噪声检测能力,更突出噪声段与鸟鸣声段,本文设置α为常数2,子带能量谱熵比可表示为

2.2 动态双门限端点判决
野外环境下的噪声具有非平稳特性,当含噪鸣声信号的能量可以衰减到噪声能量级别时[25],含噪鸣声信号的能量谱熵比快速收敛,可以通过估计含噪鸣声信号局部最小值的方法,自适应估计噪声的门限值,提高算法鲁棒性[26]。
在低信噪比情况下,为减小误判提高检测准确率,对含噪声的鸣声信号能量谱熵比进行多次中值滤波平滑处理后提取鸣声端点位置,将子带能量谱熵比最大值Fmax(m,i)与均值F做差得到D作为门限选取的基准阈值,采用双门限阈值进行有效鸣声段判决,其双门限阈值可表示为THigh=αD+F,TLow=βD+F,其中α、β是动态调节系数。
检测每段鸣声信号中能量较高的子带,确定有效鸣声的起止点。为了提高计算效率,减小有效鸟鸣声段数据误差,当子带能量谱熵比F(m,i)位于TLow时,则进入鸟鸣声段开始点,当超过高门限再次回落至低门限时,则判定为有效鸣声段的结束点。
在实际监测过程中,对采集到的鸣声数据进行自动分段,只传输有效鸣声段,若没有检测到活动鸣声段,则剔除冗余的无声数据段,数据不上传。为获得完整的鸣声段,便于云平台做进一步数据处理,通常将检测得到的鸣声数据段长度向前后各延伸15%作为完整的鸣声段上传,如果两段鸣声之间的静音长度小于各自延伸长度的和,则认为这是连续的鸣声段上传。
3 数据处理与分析
3.1 实验仿真分析
在暗绿绣眼纯净鸟鸣声中分别加入一定幅度的白噪声和实测环境噪声,模拟特定信噪比的含噪声鸟鸣声。选取的高信噪比纯净鸣声信号总时长3 s,鸣声采样频率为44.1 kHz,采样精度为16 bits。现将鸣声分成两组,分别加入信噪比为0 dB 和−10 dB 的高斯白噪声以及圆形阵列无线传感器系统现场采集的暴风雨声和风浪声噪声数据,数据分帧长度20 ms。为了避免信号间变化过大,本文帧重叠率为50%。利用子带能量谱熵比特征检测方法对有效鸟鸣声段进行检测,结果如图4所示。

图4 不同环境信噪比下鸣声检测结果Fig.4 The detection results in different SNR
在−10 dB 的噪声条件下,时域上鸟鸣声信号已完全被噪声淹没,但算法利用动态双门限方法依然能检测出三段鸣声信号起止点,证明该算法对低信噪比条件下鸟鸣声端点检测有较好的效果。
针对上述不同环境噪声下的检测概率进行了实验比较,其中准确率计算方式如下:

式(7)中,误判帧数包括噪声帧检测为鸣声帧和鸣声帧检测为噪声帧。对随机样本数据进行检测然后取平均值,得到的检测准确率如表1所示。

表1 不同环境条件下的鸟鸣声检测准确率Table 1 Birdsong detection accuracy in different environments
3.2 实测数据处理分析
为现场测实验证圆形阵列无线传感器性能及鸣声检测方法的有效性,将设备布放在野外自然条件下、如图5所示的海岛上。电源采用12 V 直流供电,传感器利用4G 物联网卡将数据传输到远程监测服务云平台并存储实验数据。

图5 鸣声传感器实验装置Fig.5 Birdsong sensor device
为了验证该方法的检测性能,对现场采集的海浪声噪声背景下的黑尾鸥原始数据进行处理分析,结果如图6所示。图6(a)是含海浪声的鸟鸣声语谱图,图6(b)为采集信号的时域波形图;图6(c)为利用子带能量谱熵比的动态双门限算法检测到的鸟鸣声起止端点结果,图中红色是双动态自适应检测门限,并将检测结果显示到时域波形图中。通过图6可以看出,子带能量谱熵比算法结合动态双门限方法在低信噪比条件下能准确检测出海岛鸟鸣声信号,且在海岛环境下具有较强的抗干扰能力。
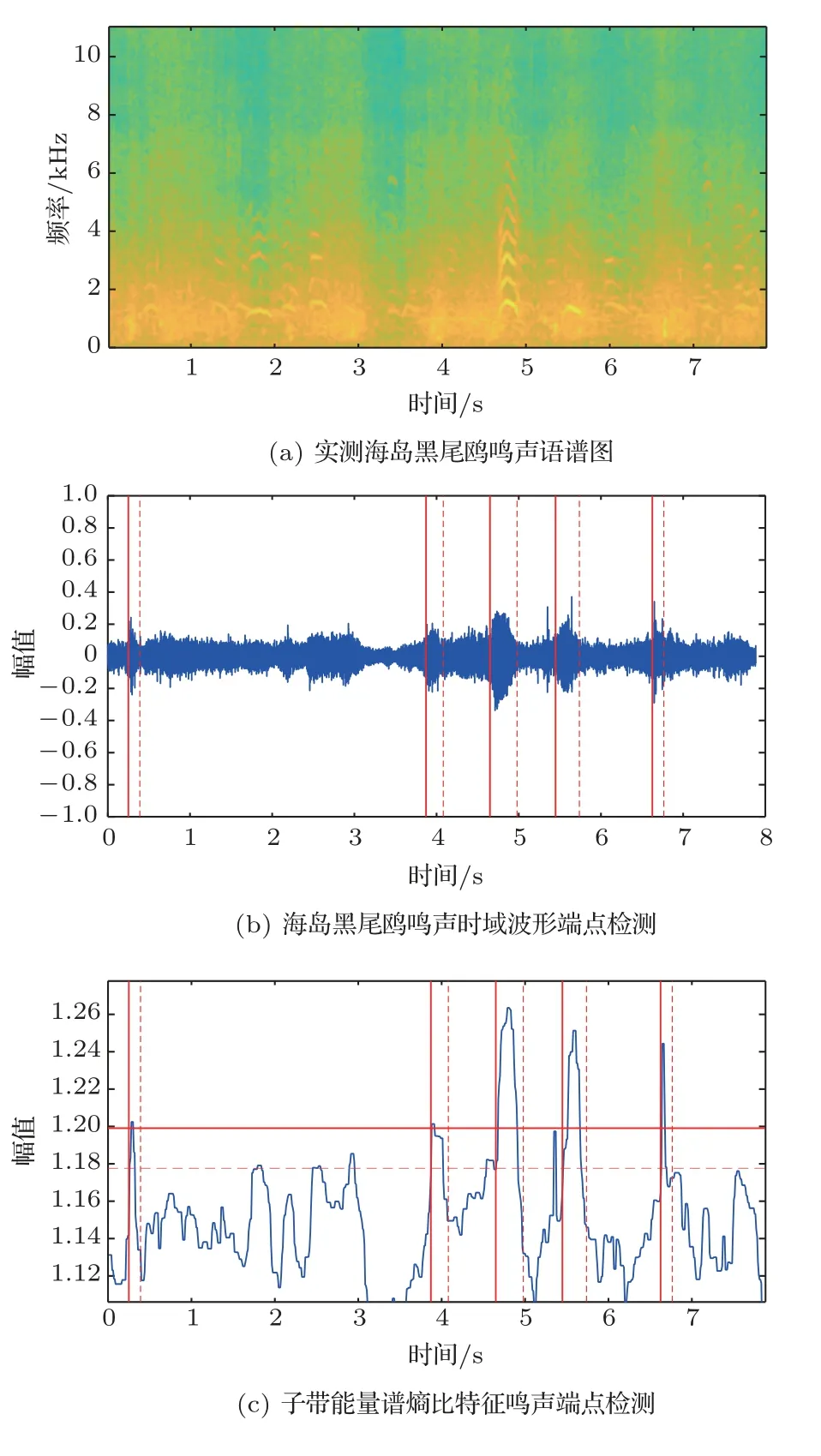
图6 现场海浪噪声条件下的鸟鸣声检测结果Fig.6 Birdsong detection with wavessound on island
4 结论
在海岛湿地等自然保护区栖息地环境噪声复杂且信噪比低,基于声学方法的鸟类活动鸣声全天候实时在线监测是生态监测领域的一个难题。本文采用球形结构的七元阵圆形阵列无线传感器系统,在现场保障设施有限的情况下,为减少系统传输负担及不必要的电能消耗,提出了基于子带能量谱熵比的动态双门限方法,对仿真和海岛现场实测数据的鸟类活动鸣声段的起止端点检测进行了验证和分析。实验表明,本算法在不同低信噪比环境下的鸟鸣声端点检测准确率较高,在海岛环境下具有良好的鲁棒性。
猜你喜欢
信号处理(2022年4期)2022-05-13
空间电子技术(2021年4期)2021-11-10
诗歌月刊(2021年8期)2021-08-25
小天使·二年级语数英综合(2021年6期)2021-08-09
语数外学习·高中版中旬(2020年8期)2020-09-10
电子制作(2019年22期)2020-01-14
中学生数理化·教与学(2019年8期)2019-09-18
雷达科学与技术(2018年6期)2019-01-07
安徽师范大学学报(自然科学版)(2018年5期)2018-12-11
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
