物流货品转运设备集成单元控制技术与应用研究
2022-07-06 03:58:32王珂
中国储运 2022年7期
文/王珂
1.引言
在传统的研究中,很少有人关注物流货品的转运情况,大部分货品是直接从起点到终点,这样,有可能因为没有选择合理的控制方案导致运输距离和成本增加。所以研究全新的控制方法对物流货品转运是十分重要的。
2.方法
2.1 建立物流货品转运设备集成单元控制模型
物流货品转运的方式有很多种,但是实现物流货品转运设备集成单元控制的基本目标为:将货品从物流配送中心根据客户的需求定时定量送到客户的卸货点处。根据以上问题,可以组建以下形式的数学问题:
设定dij代表点i和点j两者之间的最小代价,通过采用两点之间的最小距离表示。为了有效防止转运设备从一个配送中心开往另外一个配送中心,规定随机两个配送中心的最短距离为dij=L,则可以定义以下变量:
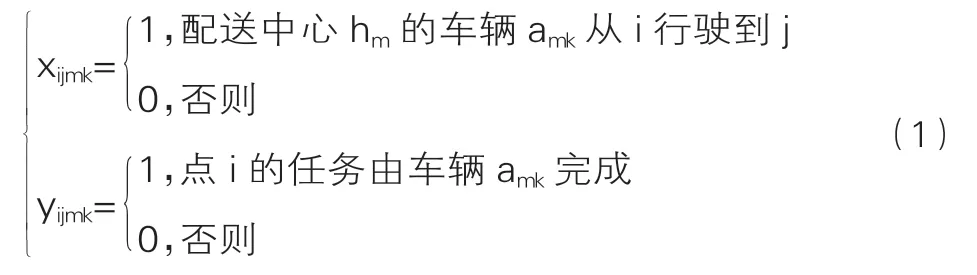
上式中,xijmk和yijmk代表不同路径对应的物品货品运输距离。
为了满足客户的实时性需求,货品必须在规定的时间内传输到客户手中。通过实际情况,可以将问题描述为以下形式:客户要求转运设备在时间范围[ti,tj]内送达,即货品送达时间不能够晚于tj,而ti则为最早送达时间。每项任务必须在规定的时间内完成,这是对时间窗的基本需求,同时需要满足设定的约束条件。假设转运设备没有在设定的时间内将货品送达,则通过双方的协调,可以给与配送中心一定的惩罚,即软时间窗对物流货品转运设备集成单元控制的要求。在构建模型的过程中,可以通过惩罚成本函数处理软时间窗集成单元控制问题。在物流货品转运设备集成单元控制中,假设配送中心有项任务需要运输,每项任务必须在客户规定的时间内送达,则车辆的平均时间宽度以及平均行驶时间两者之间的比值T(w)可以表示为以下形式:
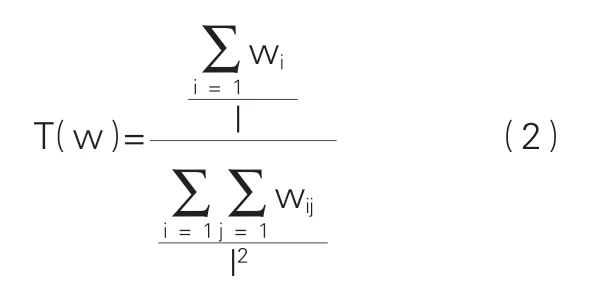
上式中,wij代表时间窗系数;l代表时间窗宽度。
配送中心和客户点分布在各个交通连接的网络中,则配送点和客户点网络结构图如图1所示:

图1配送点和客户点网络结构图
通过上述分析,构建物流货品转运设备集成单元控制模型,以最小行驶距离和运行成本为目标,对应的表达为:

lm,n上式中,代表转运设备行驶距离;rm,n代表转运设备运行成本。
2.2 模型求解
遗传算法的求解问题主要是从一个包含一定个体数量的种群开始的,每一个个体都是由符合要求的基因编码组成。在形成初始种群之后,主要通过不同个体的适应度判断个体的优劣,同时根据计算概率选择较优的个体,然后对其展开组合交叉操作,这样既可以将好的个体基因遗传给子代个体,还能以较小的概率完成变异。(1)编码:编码主要是将优化问题的解转换为基因串的形式描述,使其可以满足遗传算法的基本需求。(2)群体设定:由于遗传算法是一种基于群体型寻优的的搜索方法,所以初始阶段需要为算法事先准备一个由多个个体构建的初始群体。(3)适应度函数以及尺度变换:通过适应度函数作为主要参考依据,使用群体中不同个体的适应度取值评价个体的优劣。所以,适应度的选择在算法中占据十分重要的地位,不仅会对算法的收敛速度产生影响,同时还关系到后续是否可以获取最优解。通常情况,适应度函数是由目标函数转换而来的,所以可以将适应度函数的随机一种映射关系称为适应度的尺度转换。另外,在遗传算法中[5-6],需要对比不同个体的适应度取值,同时将其排序,并在此基础上计算不同个体对应的选择概率,所以全部适应度函数的取值全部为正值。(4)遗传操作:遗传操作是通过模拟生物的遗传以及进化过程得到的。通过上述分析,将遗传算法和蚁群算法两者有效结合,对2.1小节构建的物流货品转运设备集成单元控制模型求解,详细的操作步骤如图2所示:(1)分别对遗传算法以及蚁群算法的相关参数初始化处理,确定全部物流货品的起点以及终点,同时设定每组获取货品转运设备的随机值。(2)通过染色体获取起点以及物流货品转运设备数量,同时通过蚁群算法完成路径优化。(3)通过目标函数完成全部染色体评价,假设随机一个染色体的评价值优于历史最优值,则将当前的评价值设定为历史最优值,重复步骤(3),即可获取群体最优值。(4)是否满足终止条件,假设值,则停止计算;反之,则返回步骤(2)。

图2物流货品转运设备集成单元控制模型求解流程图
3.仿真实验
为了验证所提物流货品转运设备集成单元控制方法的有效性,需要展开相关的实验测试。将机械配件配送中心作为研究的主要对象,设定共有5个配件中心,每个配送中心有专门的转运设备负责配送,其中需要送货的客户点以及途径地点如表1所示:
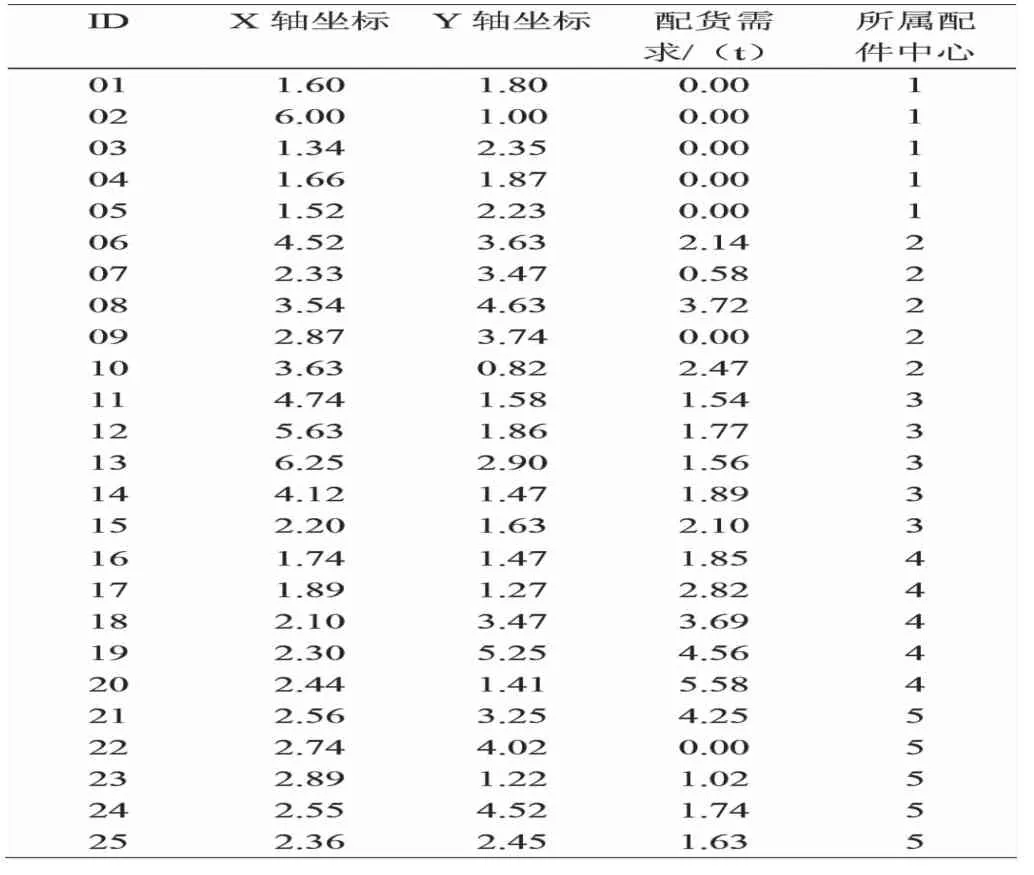
表1不同地点位置坐标
通过控制需求确定各个方法的转运设备数量和总行驶路程,具体实验结果如图3和图4所示:
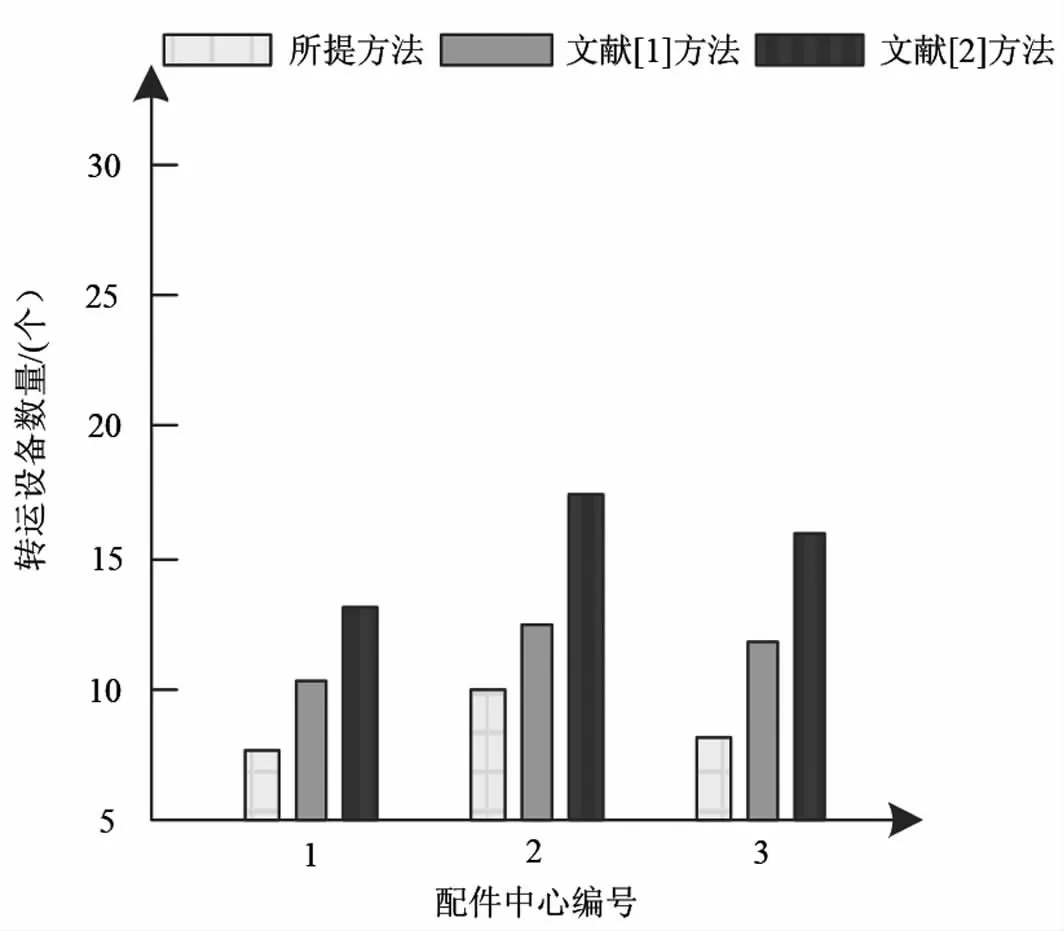
图3不同方法的转运设备数量对比结果分析

图4不同方法的总行驶路程对比结果分析
分析图3和图4中的实验数据可知,相比另外两种方法,经过所提方法对物流货品转运设备集成单元控制管理之后,转运设备数量以及总行驶路程得到明显降低,有效证明了所提方法的优越性。
进一步分析三种不同方法的空载路程以及空驶率变化情况,详细的实验测试结果如表2~表3所示:
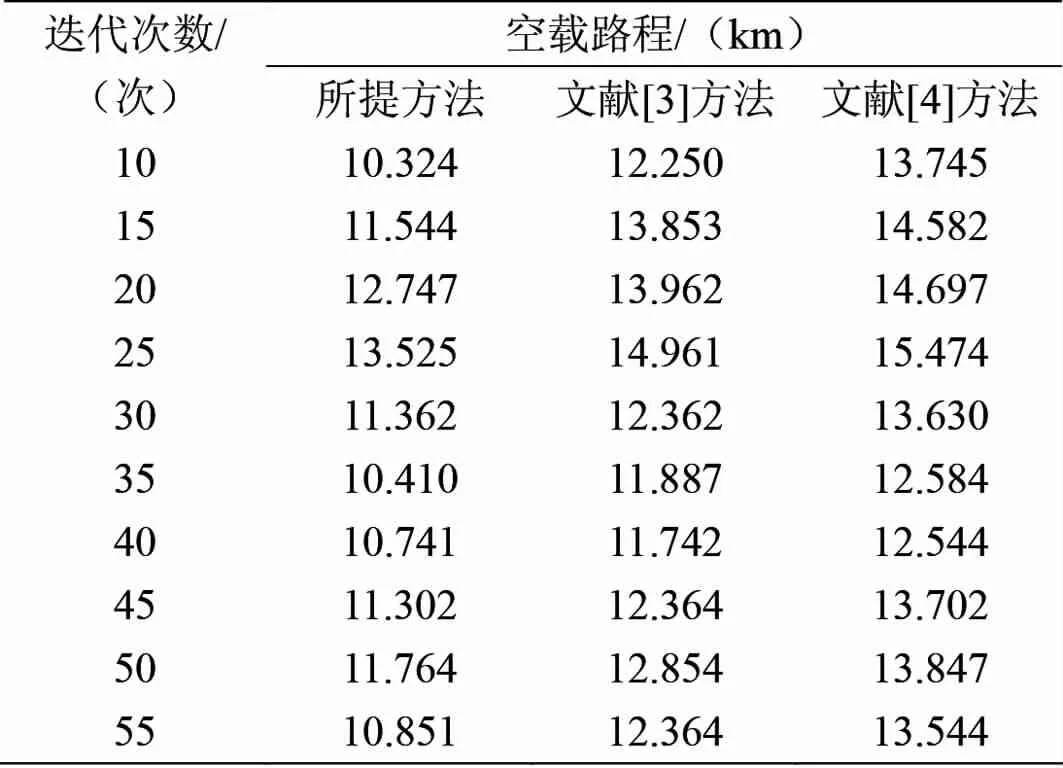
表2不同方法的空载路程测试结果对比分析

表3不同方法的平均空驶率测试结果对比分析
分析表2和表3中的实验数据可知,所提方法的空载路程以及平均空驶率在三种方法中为最低,说明所提方法获取的控制方案是比较理想的,可以将整个货品转运过程中产生的损失降至最低。
4.结束语
针对传统方法存在的一系列问题,设计并提出一种物流货品转运设备集成单元控制方法。经过大量测试证明,所提方法可以获取满意的集成单元控制方案,为物流企业信息化和智能化奠定坚实的基础,同时也可以有效提升物流企业的管理水平。
猜你喜欢
科学技术与工程(2022年26期)2022-11-01 05:40:14
计算机仿真(2022年8期)2022-09-28 09:53:02
中国船检(2021年11期)2021-12-04 14:02:26
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
中国塑料(2016年11期)2016-04-16 05:26:02
智能系统学报(2015年4期)2015-12-27 09:38:39
系统工程学报(2015年5期)2015-02-28 19:54:16
山东纺织科技(2014年4期)2014-04-06 03:37:42