基于差分定位的输电线路无人机自主巡检异常情况研究
2022-07-06 14:50吴宇鑫李小来王伟东徐森熙程俊翔
湖北电力 2022年3期
吴宇鑫,金 哲,孔 韬*,李小来,王伟东,徐森熙,程俊翔
(1.国网湖北省电力有限公司超高压公司,湖北 武汉 430050;2.三峡大学电气与新能源学院,湖北 宜昌 443002)
0 引言
近年来,超、特高压输电线路规模大幅增加,这对输电线路的运维水平和巡检效率提出了更高的要求[1-11]。截止2021年12月,国网湖北省电力有限公司超高压公司宜昌运维分部负责运行维护超、特高压输电线路25 条,长度1 726.12 km,杆塔3 682 基,绝大多数的输电线路位于群山峻岭之中,运维难度较大,随着无人机巡检技术的应用[12-15],输电运维人员可以在电脑端快速、准确地发现线路中的隐患缺陷,使得输电线路运维效率有了质的提升,无人机巡检技术成为了输电线路智能巡检技术发展的重要方向。
Gupta L[16]等学者通过研究认为,受地面、操控人员视角差异影响,人为操控精确定位相当困难,不仅降低工作效率,而且可能因定位不良影响航拍和状态诊断的有效性[17-18],有必要开展无人机自主巡检解决这些问题,但并没有论证,无人机自主巡检可能引起的其他异常情况;国内毛远军[19-20]等学者分析了自主巡检、作业安全管控、缺陷识别技术和巡检数据应用、辅助检修作业等关键技术应用现状,并在结论中指出了该技术的不足,但未对不足情况指出解决方案。
目前,在高精度RTK 差分定位技术支持下,通过无人机搭载激光雷达设备[21-30]建立三维点云模型,在三维模型上绘制航线轨迹,进行自主巡检时,将无人机记录的航线轨迹中航拍轨迹点精确的经纬度、海拔高度和摄像头俯仰角度等信息提取出来,即可据此进行无人机自主巡检,自主巡检设备组成和信号传输情况如图1所示,从而拍摄高分辨率图像。
2019 年8 月-2019 年12 月,国网湖北省电力有限公司检修公司宜昌运维分部对所辖的适航区全部3 078基杆塔开展了4 942次无人机自主巡检工作,如图2所示,通过大数据分析发现,其异常率高于现场要求5%,无人机自主巡检异常,不仅会影响正常的作业流程,获取不到杆塔部件的照片资料,增加人员重复作业工作量,而且严重时会导致无人机偏航、撞击、坠机。针对此问题,本文详细分析了无人机自主巡检工作异常的原因,针对其中的主要原因进行了详细分析,根据分析的结果制定了改进对策,并使用改进后的方法进行试验,验证该方法的可行性。
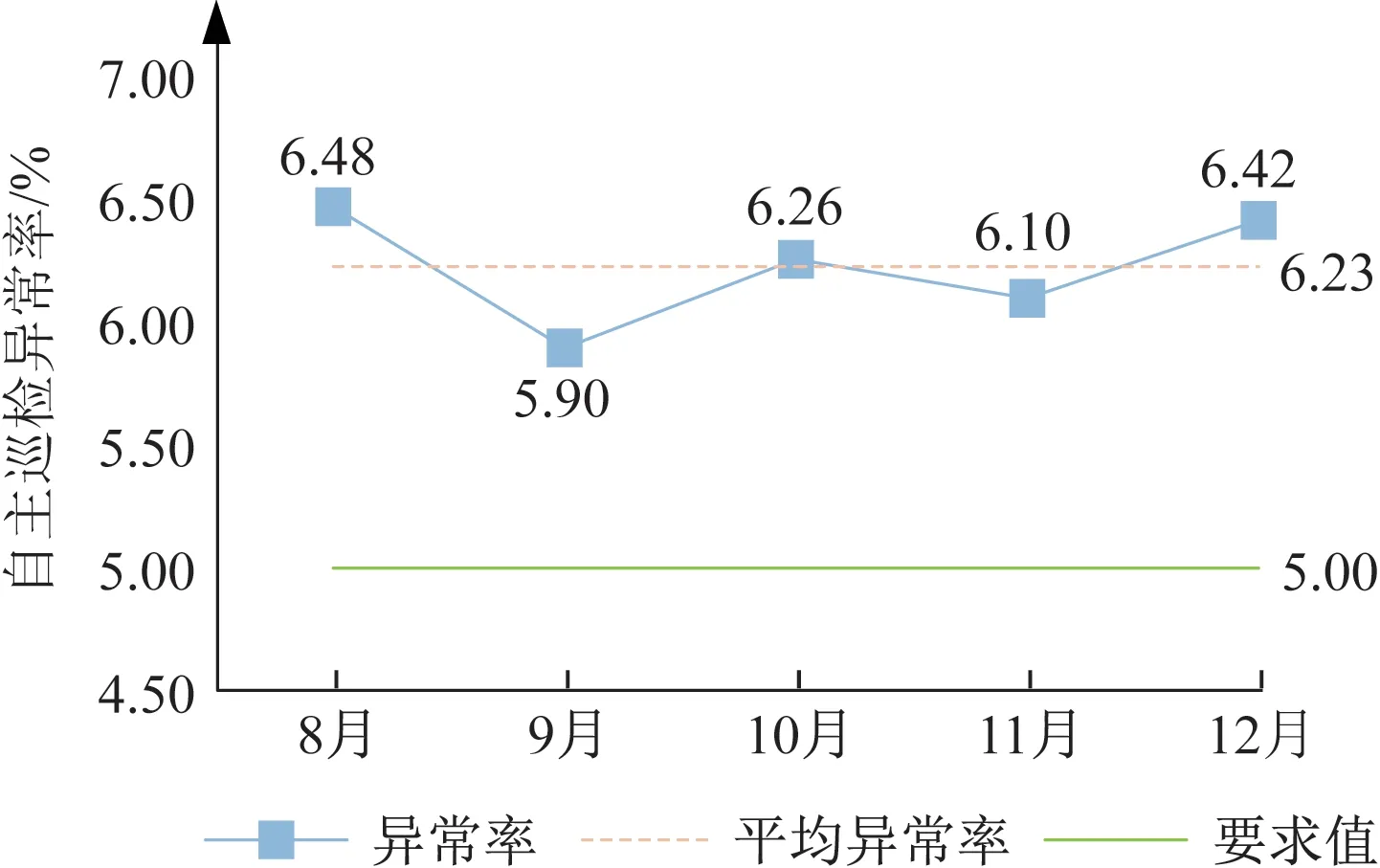
图2 输电线路自主巡检异常情况调查图Fig.2 Diagram of abnormity investigation on autonomous inspection of transmission line
1 常见的无人机自主巡检异常情况
本文对宜昌运维分部2019年8月-2019年12月的4 942次无人机自主巡检工作的异常情况进行分析,经分析发现,照片命名错误、撞击障碍物、照片获取异常是无人机自主巡检的主要异常情况,本文对此进行针对性分析。
无人机在自主巡检或姿态飞行过程中,撞击障碍物,导致无人机损坏,造成该事故主要有以下原因:一是由于三维点云精度低等原因造成绘制航线时未扫描出障碍物,导致无人机在正常飞行的情况下,撞击障碍物;二是由于在建立三维点云模型时,所设置的天线偏差过大,三维模型坐标不准确,使得航线轨迹坐标错误;三是受拍照角度错误、拍照环境逆光等因素影响,无人机自主巡检拍摄照片无法清楚地展示部件点情况,导致工作人员无法准确掌握线路运行情况;四是重命名步骤多,导致资料员工作量过大,易造成重命名错误的情况,导致无法分辨杆塔塔号及部件点位置。下面,对这些情况逐一进行以下分析。
1.1 激光点云密度
激光雷达设备用于对杆塔点云数据的采集,采集设备示意图如图3 所示,对2019 年8 月-2019 年12 月使用不同采集精度的激光雷达设备进行无人机自主巡检的作业次数和异常次数进行了统计,如图4所示。

图3 激光雷达采集设备Fig.3 Lidar acquisition equipment
由图4 可知,异常率最大为采集精度15 mm 的6.33%,最小为50 mm 的5.98%,两者相差0.35%,虽然异常率相差不大,但仍有所区别,在大量应用后,对降低无人机自主巡检异常率仍有较大帮助。
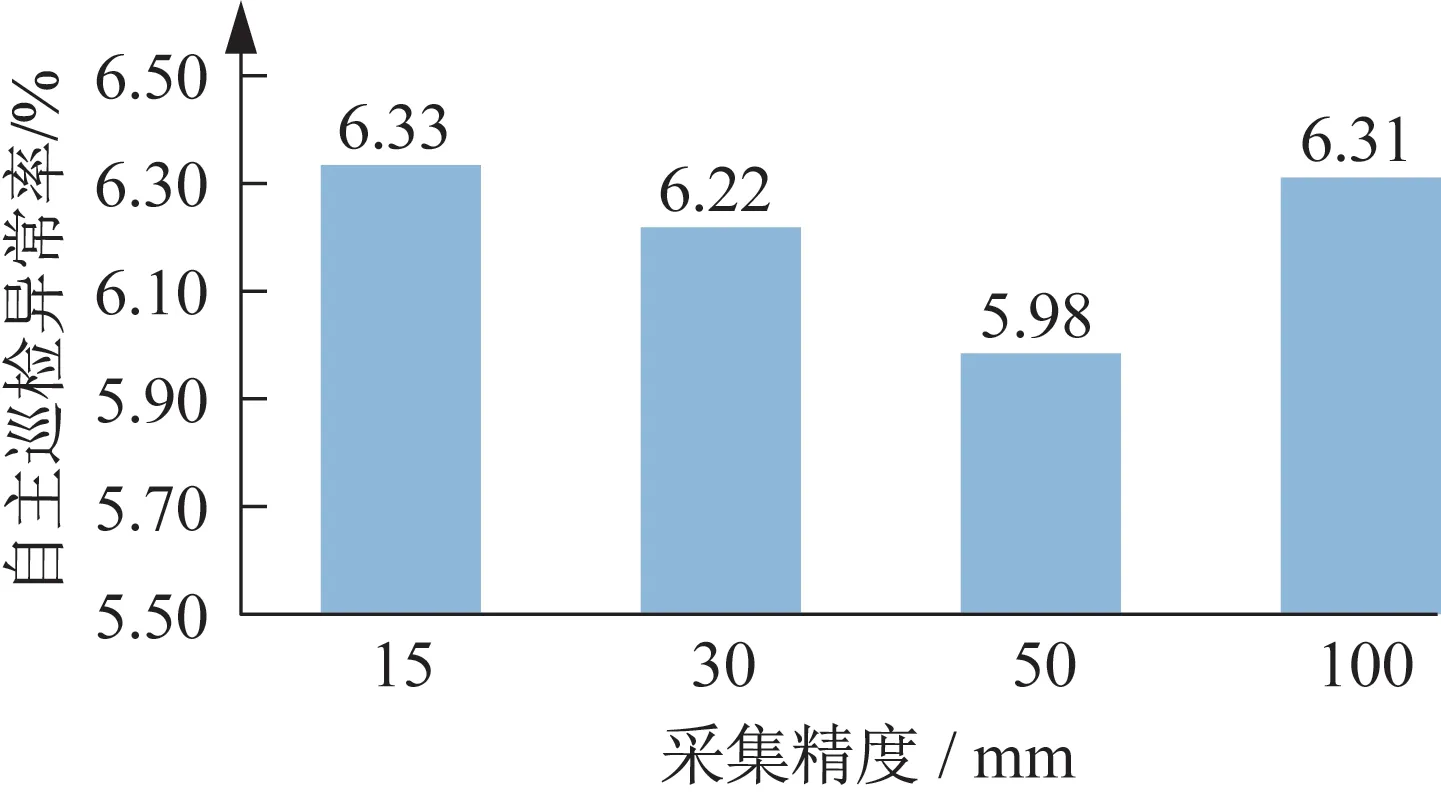
图4 不同采集精度激光雷达设备进行500 kV山地自主巡检异常情况Fig.4 Anomalies of autonomous patrol inspection on mountainous 500 kV line by different-acquisition-accuracy lidar equipment
1.2 航线绘制偏差
实际手动绘制航线时,一般借助电脑端软件进行绘制,一般情况下航点偏移距离与实际航点偏移距离的比约为1∶500。选择500 kV葛安一、二回200基位于山地的杆塔,在不同绘制偏差下进行无人机自主巡检作业试验。然后,对不同绘制偏差下无人机自主巡检异常情况进行了统计,如图5所示。

图5 绘制偏差情况统计图Fig.5 Statistical diagram of route-mapping deviation
由图5 可知,绘制偏差最大异常率为4 mm~5 mm的10.5%,最小为0 mm~1 mm 和1 mm~2 mm 的2.0%,两者相差8.5%。
1.3 天线设置
选取中海达RTK 设备获取定位点的GPS 坐标,测量示意图如图6所示。

图6 偏差位置获取示意图Fig.6 Schematic diagram of deviation position acquisition
选取500 kV 盘宜一、二回位于山地200 基杆塔进行自主巡检试验,统计在不同天线设置偏差下自主巡检异常次数,如图7所示。
由图7可知,自主巡检异常率最大为5 cm-6 cm的6.5%,最小为0 cm-1cm 和1 cm-2 cm 的1.5%,两者相差5.0%。

图7 不同天线设置偏差下的500 kV山地自主巡检异常次数统计图Fig.7 Statistics of abnormal times of autonomous inspection on mountainous 500 kV line under different antenna setting deviation
1.4 照片命名
无人机存储的照片资料需要对逐条线路、逐基杆塔进行区分,并对部件点逐一进行重命名。如果重命名步骤多,导致资料员工作量过大,易造成重命名错误的情况,导致无法分辨杆塔塔号及部件点位置。
无人机存储的照片资料需要对逐条线路、逐基杆塔进行区分,并对部件点逐一进行重命名。操作步骤数计算公式如下:
重命名步骤数≈线路数+杆塔数+照片数
2019 年8 月-2019 年12 月500 kV 盘宜一、二回线路山地无人机自主巡检的杆塔数量及获取的照片数量,如表1所示。
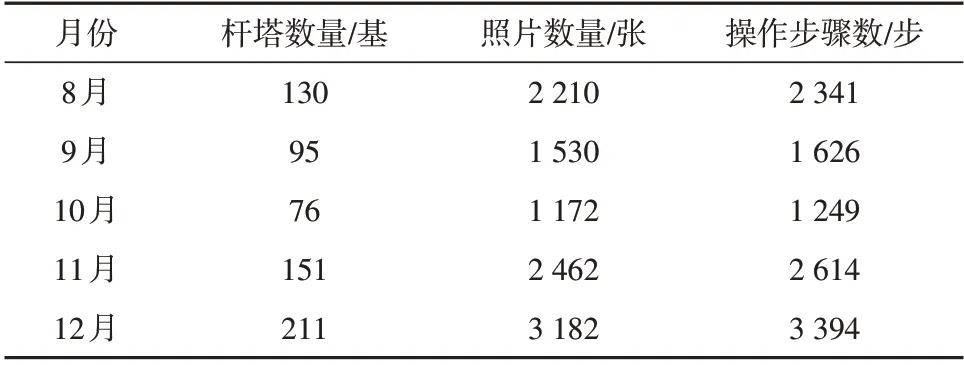
表1 2019年500 kV盘宜一、二回山地自主巡检杆塔数量、照片数量及操作步骤数Table 1 Number of towers,photos and operation steps of autonomous inspection on 500 kV Pan-Yi primary and secondary line in the mountainous area in 2019
由本章节分析可知,航线绘制偏差值、天线设置偏差值和照片命名步骤数,均是造成无人机自主巡检异常率高的主要原因,现针对这3条原因进行分析。
2 航线绘制偏差解决方案及效果
2.1 分析航线文件描述
使用Notepad++软件对航线文件进行分析,分析出航线文件组成,并绘制了示意图,如图8所示。经过试验与分析,发现航线文件字段的描述与无人机动作之间的关联,在进行同一类型杆塔自主巡检时由于所需拍照的航迹点是相同的,仅是不同航迹点坐标、云台偏航角和俯仰角。
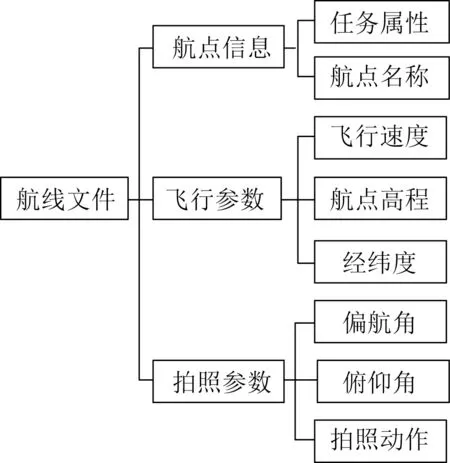
图8 航线文件组成示意图Fig.8 Schematic diagram of route document composition
2.2 分析航线绘制规则
航点坐标通过部件点坐标和偏移向量获得,云台方向向量由拍照点航点和部件点航点决定,偏航角和俯仰角由航向和云台方向向量计算获得,如图9所示。

图9 偏航角和俯仰角示意图Fig.9 Schematic diagram of yaw angle and pitch angle
固定航点的飞行顺序,将航点按照既定的顺序排列好,配置拍照点的参数。编制公式通过部件点的坐标自动计算出航点的坐标,按照三角函数公式计算出拍照点的偏航角和俯仰角,将航点坐标、拍照点坐标和拍照点参数按照航线文件格式汇总就生成了一个新的航线文件,将编辑好的航线进行试验发现,不符合安全距离的航点数占比依旧很高,不符合作业要求,必须选择专业航线编辑软件进行航线编辑工作。
2.3 确定航线编辑软件
作业人员可以将预先编辑好的航线文件通过数据传输发送到无人机端进行执行。按照自主巡检的作业需求,对常用的航线编辑软件大疆DJI Pilot、大疆智图、数字绿土Lipoweline进行选择确定。
由表2可知,数字绿土Lipoweline软件具有模板航线生成和航线批量检查功能,选择Lipoweline 软件进行航线的编辑和检查工作。

表2 常用航线编辑软件的选择确定Table 2 Selection and determination of common route editing software
2.4 测试“模板绘制”及“批量检查”功能
绘制500 kV 清葛线001 号杆塔航线,并保存为模板航线,然后利用模板航线生成同一类塔型的目标杆塔024号的航线,如图10所示。

图10 目标杆塔航线Fig.10 Target tower route
对生成的目标杆塔航线进行安全检查,如图11所示,发现8号航点距离杆塔位置仅2.17 m,小于设置的安全距离2.5 m,需对航点进行修改。经修改后的航线如图不再提示安全距离不足。

图11 航线安全检查提示及经修改后的航线Fig.11 Soute safety inspection tips and modified routes
2.5 效果检查
借助航线绘制软件Lipowerline 统计2020 年8 月-2020年12月500 kV输电线路绘制的航线最大偏差,如表3 所示。由表3 可知,经改进后,航线绘制偏差<2.0 mm,由表3 数据可知,航线偏差值控制在该区间段时,无人机自主巡检异常率较低。

表3 对策一效果检查统计表Table 3 Statistical table of effect inspection of Countermeasure I
3 开发自动重命名功能及效果
3.1 确定总体思路
照片的整理归档首先要将不同线路名称的照片区分开,然后将同一条线路不同杆塔的照片进行区分,而后将同一基杆塔不同部件的照片进行区分,最后将照片的名称按照统一的格式进行命名。
3.2 制定照片与部件点匹配方法。
照片的特征值包含在属性信息中,照片属性信息中包含照片GPS坐标,绘制部件点与照片匹配示意图,如图12所示。

图12 部件点与照片匹配示意图Fig.12 Schematic diagram of matching component points with photos
3.3 设计功能模块
根据照片与部件点匹配方法,设计功能模块。
1)提取照片GPS坐标值
根据照片属性信息中包含的GPS 坐标,提取照片的GPS坐标值,如图13所示。
2)建立特征值与名称匹配规则
GPS 坐标变换为平面坐标示意图,读取无人机航线中的拍照点所拍部件点名称与坐标o1[x1,y1,z1]。设定拍照点阈值δ(一般为1 m)。依据坐标变换获取照片坐标o2[x2,y2,z2]。将部件点坐标与照片坐标进行计算空间距离。

若p≤δ,则匹配;若p>δ,则放弃。利用逐步比较的算法实现照片坐标值与部件点坐标值一一比较。
3)照片自动命名
分析公司照片命名规则,根据线路名称、杆塔号进行区分,对每张照片根据部件点名称进行重新命名。
3.4 测试自动重命名功能
对500 kV盘宜一回150号至169号的杆塔照片进行自动命名试验,照片自动重命名功能界面,如图14所示。

图14 自动重命名功能界面Fig.14 Interface of automatic renaming function
试验时手动输入相应参数,设置好文件夹路径。 试验结果如图15所示。

图15 已重命名的盘宜一回169号部件点照片Fig.15 Point images of renamed No.169 part on Pan-Yi primary circuit
3.5 照片自动重命名效果检查
对2020年8月-2020年12月自主巡检获得的照片资料进行了重命名试验,对作业次数和总步骤数进行了统计,如表4所示。照片自动重命名实施之后,每基杆塔重命名步骤数<3次,由表4数据可知,重命名步骤数控制在该区间段时,无人机自主巡检异常率较低。

表4 照片自动重命名效果检查表Table 4 Effect checklist of image automatic renaming
4 “固定式”基站架设方法及效果
4.1 制定“固定式”基站架设方案
确定“固定式”基站架设总体思路,总体思路包括,分析GNSS 基站架设规则,记录满足作业条件的基准点,对设备装置进行选型,编制操作手册等。
选取尺寸和高度合适的三脚架作为天线的固定基座,选取尺寸和硬度合适的塑料箱作为基站设备的保护箱。“固定式”基站安装方案,如图16所示,基站架设在基础稳定、视野开阔、远离干扰源的地点。

图16 “固定式”基站安装方案Fig.16 Installation scheme of"fixed"base station
4.3 实施“固定式”基站安装方案
1)确定安装流程
仅首次安装需寻找基准点,及测量坐标,安装流程如图17所示。
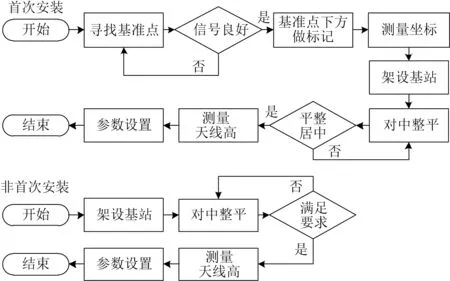
图17 “固定式”基站安装流程图Fig.17 Installation flow chart of"fixed"base station
2)实施安装方案
进行“固定式”基站安装,如图18所示。

图18 “固定式”基站安装Fig.18 Installation of"fixed"base station
3)编制操作手册
编写操作手册,对基准点选取、基站架设和参数设置等进行说明。包括:①基准点选取;②基站架设;③参数设置。
4.4 效果检查
2020 年5 月分5 批次进行试验,每批进行10 次基站架设,借助中海达RTK 设备测量并求取天线偏差值,如表5所示。

表5 效果检查统计表Table 5 Effect check statistics
由表5可知,应用这种方法,天线设置偏差<3 mm,由表5数据可知,天线设置偏差控制在该区间段时,无人机自主巡检异常率较低。
2020 年,国网湖北省电力有限公司检修公司宜昌运维分部应用改进后的方法,对所辖输电线路开展自主巡检工作,分别对2020 年8 月-2020 年12 月无人机自主巡检异常次数进行了调查,调查结果如表6 所示。

表6 活动实施后自主巡检异常次情况调查表Table 6 Questionnaire on abnormity times of self-inspection after the implementation of the activity
5 结语
2020年8月-2020 年12月的自主巡检异常率均低于要求值5.0%。使用改进后的方法,山地无人机自主巡检异常率由之前的6.23%降至3.88%,取得了不错的效果。目前,本方法在湖北省500 kV 输电线路应用后,山地地形下输电杆塔无人机自主巡检异常次数显著减少,自主巡检作业安全性得到提升。由于无人机出现异常频次降低,节省了需处理异常的时间,单位时间内可以完成更多杆塔的自主巡检作业,提高了巡检效率。
猜你喜欢
卫星应用(2022年1期)2022-03-09
科教新报(2022年2期)2022-02-21
河北大学学报(哲学社会科学版)(2022年1期)2022-02-17
艺术品鉴(2021年2期)2021-04-26
汽车维修与保养(2020年11期)2020-06-09
科学与财富(2020年6期)2020-05-19
读者·校园版(2019年21期)2019-10-18
小学语文教学·会刊(2019年2期)2019-09-10
电子制作(2019年11期)2019-07-04
科学启蒙(2015年11期)2015-11-28