
一种基于云模型的水肥配比控制策略
2022-07-06 02:45:57唐先红吴云志
安徽农业科学 2022年12期
唐先红 吴云志




摘要 针对水肥配比控制精度低以及控制方法对于被控系统动态变化适应性弱的问题,开展了水肥配比控制策略设计,构建了基于云模型的模糊PID控制方法,能够有效改善传统PID控制对被控系统动态变化适应性较弱的问题,实现了根据输入值的动态变化对PID控制参数的实时修正。最后通过试验验证了方法的有效性,表明将基于云模型的模糊PID控制方法用于水肥配比控制可以快速调节肥液流速,缩短水肥比例调控的时间,实现根据由水压等原因导致水流速的变化来动态调节肥液流速,使得系统按照理想的水肥比例将水和肥同步灌溉到作物,具有较好的应用前景。
关键词 水肥一体化;云模型;模糊控制;PID控制;水肥配比
中图分类号 S 126 文献标识码 A
文章编号 0517-6611(2022)12-0214-04
doi:10.3969/j.issn.0517-6611.2022.10.054
开放科学(资源服务)标识码(OSID):
Water and Fertilizer Integration Control Strategy Based on Cloud Model
TANG Xian-hong,WU Yun-zhi (Anhui Agricultural University,Hefei,Anhui 230031)
Abstract Aiming at the problems of low precision of water fertilizer ratio control and weak adaptability of control method to the dynamic change of controlled system,we designed the control strategy of water fertilizer ratio.The fuzzy PID control method based on cloud model was proposed,and the real-time correction of PID control parameters was realized according to the dynamic change of water fertilizer ratio.The effectiveness of fuzzy PID control method based on cloud model was verified by experiments.Results showed that the fuzzy PID control method based on cloud model could quickly adjust the fertilizer flow rate,shorten the time of water fertilizer ratio regulation,and dynamically adjust the fertilizer flow rate according to the change of water flow rate caused by water pressure and other reasons,so that the system could synchronously irrigate the water and fertilizer to the crops according to the water fertilizer ratio.
Key words Water and fertilizer integration;Cloud model;Fuzzy control;PID control;Water and fertilizer ratio
水肥一體化技术自出现以来,许多国家,尤其是发达国家在技术开发上投入了巨大的精力。种植环境数据的融合技术国外已应用广泛,实现了农业智能装备控制系统与环境检测系统的高效结合[1]。在国外,以色列、美国、荷兰、日本等国家的水肥一体化技术普遍应用于大棚作物种养和实际农田生产中,均已经取得良好的经济效益。其中,沙漠农业领域水肥一体化技术最发达国家是以色列[2];荷兰等国家水肥一体化设备比较发达,智能施肥灌溉技术也发展得很成熟,精准配肥智能灌溉技术实现较早[3];以色列已经建立了全国灌溉系统,并应用于果树等农作物种植中[4],随着现代农业的发展,加拿大已由传统种地逐渐转为根据农业决策数据种地[5];文献显示美国的微灌技术推广应用最广泛[6],此外美国大力发展和应用变量施肥技术,处于世界领先水平,并提出正确的时间、区域、营养元素及用量进行施肥的“4R”计划,以减少环境污染[7]。针对水肥耦合控制的方法研究,国内外的研究热点是模糊控制[8-9]。李帅帅等[10]设计了模糊PID控制策略实现对肥液电导率的控制,使其维持在一定数值,并应用于大棚施肥自动控制系统;詹攀等[11-12]分别设计了FPID控制方式和VFPID控制方式,精准控制和提高水肥溶液浓度和酸碱度的配制浓度;Jiang等[13]设计了模糊控制方法对电磁阀占空比进行调制,使得肥液浓度维持在目标范围;Zhang等[14]设计神经网络PID控制,控制泵速以实现单肥路水肥精准配比;Bi等[15]将灰度预测方法运用于模糊PID控制,实现水肥精准控制,并应用于农业示范区。我国水肥一体化技术和设备已大量应用于设施农业基地,但仍存在水肥配比控制精度低以及控制方法对于被控系统动态变化适应性弱等问题。鉴于此,针对水肥配比控制,笔者设计了基于云模型的模糊PID控制方法,实现了根据水肥配比值的动态变化对PID控制参数的实时修正,改善了PID控制对被控系统动态变化适应性较弱的问题。
1 水肥配比控制策略设计
水肥一体化系统在进行水肥配比控制时,灌溉主管路中水流速由于水压等原因实时发生变化需要一种适应水流速变化,及时调节注肥管路中肥液流速的控制方法,实现动态调控注肥管路中肥液流速,维持水肥配比值在误差范围内。且对于常规的PID算法,控制参数经实际测量后,得到具体的数值,不再发生变化,难以满足系统动态控制的需求。而基于云模型的模糊PID控制算法是一种自适应算法,能够根据云模型推理结构及时调节PID控制的参数Kp、KI、KD,使水肥配比调节具有精准性,因此采用基于云模型得模糊PID控制方法进行系统中的水肥配比控制。云模型模糊PID控制器结构如图1所示。
基于云模型的模糊PID控制器设计总体方法是以水肥配比过程中实际输出y(t)和目标输出r(t)之间的误差e及其变化率ec为依据,通过二维云模型推理对PID控制器的控制参数进行调节,使其满足控制系统要求。云模型模糊PID控制器由2部分组成:二维云推理结构和PID控制结构。由云模型推理结构推理得到PID控制修正值,ΔKp、ΔKI、ΔKD,并结合PID控制初始值Kp0、KI0、KD0,作为PID控制3个控制参数:Kp、KI、KD。最终由系统输出控制量u(t)改变注肥管路中隔膜泵的速率,实现对水肥配比值的调节,使水肥配比达到动态平衡。
二维云模型推理结构由前件隶属云和后件隶属云共同构成。根据输入变量的数字特征确定前件云,通过前件云发生器输出隶属度
μNj,其中N为前件云的规则条数;根据输出变量的数字特征确定后件云,将
μNj作为后件云输入,经后件云发生器生成隶属度为μNj的yNj,其中N为后件云的规则条数;对后件生成的y1j、y2j,…,ynj,经过加权平均处理,得到ΔKp、ΔKI、ΔKD。再加上PID控制的初始值Kp0、K10、KD0,作为系统PID控制的参数,输出控制量实现对水肥配比的控制。
2 隶属云与控制规则设计
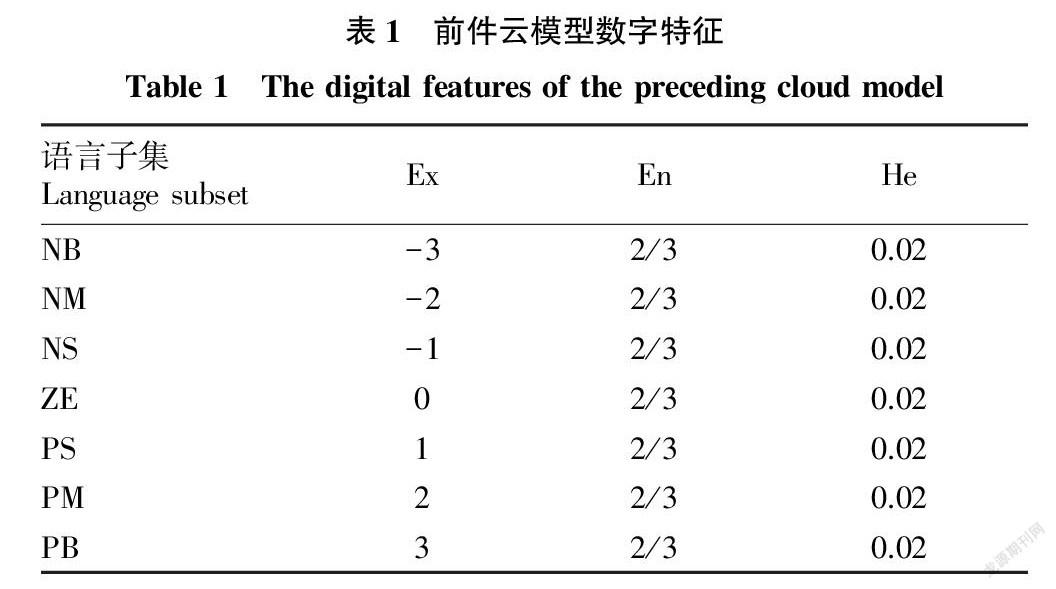
在基于云模型的模糊PID控制中,将水肥配比值的偏差e和偏差变化率ec作为系统的输入,对e和ec划分7个语言子集{NB、NM、NS、ZE、PS、PM、PB},对应的每一个语言子集的数字特征如表1所示。
根据水肥配比控制过程的输入参数e和ec的数字特征,及设置云滴生成数n=1 000,通过正向云发生器生成控制系统输入参数的前件云模型如图2所示。
在基于云模型的模糊PID控制中,将ΔKp、ΔKI、ΔKD作为系统的输出变量,对输出变量划分7个语言子集{NB、NM、NS、ZE、PS、PM、PB},每一个语言子集的数字特征如表2所示。
根据系统的3个输出参数的数字特征,及设置云滴数为n=1 000,对应后件隶属云模型如图3所示。云模型从左至右分别代表了语言值NB、NM、NS、ZE、PS、PM、PB。
根据控制阶段实际需求,对控制规则进行确定。在PID
控制系统中,比例项Kp起到加快系统响应速度作用;积分项KI起到减小系统稳态误差作用;微分项KD作用是将达到系统控制目标时,防止系统的超调和震荡。根据PID控制中控制参数作用,设计以下调整原则:
(1)e较大时,即系统设定值与实际值差值较大时,需增大Kp加快系统响应速度,减小防止微分过饱和。
(2)当e和ec适中时,在保证响应速度和防止系统超调的前提下Kp、KI、KD均不宜过大。
(3)当e较小时,适当增大KI减小系统的稳态误差;适当引入KD减小系统的震荡。
结合参数调整原则和以往相关领域学者经验,制定基于水肥配比控制的3×49條模糊控制规则,推理规则表如表3所示。每一行3个输出语言变量从左至右分别是输出参数ΔKp、ΔKI、ΔKD论域中的语言变量。
3 云模型推理流程
云模型推理结构由前件隶属云和后件隶属云以及推理规则构成,隶属度的推理由前件隶属云完成,后件推理输出由后件隶属云完成。
通过输入当前水肥配比值与目标水肥配比值的差值e及其变化率ec,经推理得到PID控制的修正值,由PID输出控制量,控制隔膜泵。采用基于云模型的模糊推理算法,根据误差的变化在线修正了PID控制系数,使PID控制适应水肥配比动态变化。具体推理过程如下:
(1)首先,计算出系统的输入变量即偏差e和偏差变化率ec。
Input=(e,ec)(1)
(2)由输入变量激活推理规则中前件隶属云,并计算出相应隶属度。
P1j=Nl(Enj,Hej)
P2j=Nl(Enj,Hej)
μj(e,ec)=e-(e-Ex)22(P1j2-(ec-Ej)22(P2j)2(2)
式中,P1j为变量e的论域上第j个云模型生成的正太随机数,P2j为变量ec的论域上第j个云模型生成的正太随机数,μj为前件云推理输出。
(3)每一个推理规则前件根据推理规则表,映射到推理后件对应的隶属云,得到推理输出。
Pij=Nl(Enj,Hej)
yij=Ex±-2logμj(e,ec)×Pij(3)
式中,Pij为输出变量i的论域上的第j个云模型生成的正态随机数,yij为后件推理输出,i为PID控制的3个修正值。
(4)对各推理规则的输出经加权平均即得PID控制得修正系数。
根据推理流程,设计了基于云模型的模糊推理算法,具体算法流程图如图4所示。其中,l为推理规则条数,n为实验中变量论域中的j个云模型生成的云滴数目。根据实际需求构建了输入变量与每一个PID控制修正值间的49条控制规则,在进行模糊推理实验时,设置输入输出变量论域中云模型的生成云滴数为500,最终通过对推理结果进行加权平均得到PID控制的修正值。
4 试验与分析
根据二维云模型推理结构的设计流程,以及相应的算法实验,完成云模型推理结构的构建。任意输入5组(e,ec)数据,对云模型推理结构进行验证,经二维云模型推理得到PID控制修正值结果如表4所示。
对表4中第5组数据进行分析,当e=2.3,ec=1.0时,即e隶属于PM和PB的程度较大,ec隶属于PS的程度较大,PID控制修正值
ΔKP、ΔKI、ΔKD分别为-1.63、1.52、1.17。对照推理规则表3可知,云模型推理输出与规则设计相符。
5 结语
通过构建基于云模型的水肥配比控制策略,实现了根据输入值的动态变化对PID控制参数的在线修正,改善了PID控制对被控系统动态变化适应性较弱的问题。在未来的研究工作中,将继续针对具体的农业生产实际需求,结合水肥的实际流动情况构建相关模型,使控制策略发挥更好的效果。
参考文献
[1]
王付才.基于多元数据融合的温室大棚水肥一体机控制策略及系统研究[D].济南:齐鲁工业大学,2020.
[2] VAN ZYL J E,SAVIC D A,WALTERS G A.Operational optimization of water distribution systems using a hybrid genetic algorithm[J].Journal of water resources planning and management,2004,130(2):160-170.
[3] 宋坤.水肥一体化智能设备关键技术研究[D].广州:广州大学,2017.
[4] SIVAGAMI A,HAREESHVARE U,MAHESHWAR S,et al.Automated irrigation system for greenhouse monitoring[J].Journal of the institution of engineers(India):Series A,2018,99(2):183-191.
[5] 张辉,张永江,杨易.美国、加拿大精准农业发展实践及启示[J].世界农业,2018(1):175-178.
[6] 周路菡.水溶性肥料产业新时代[J].新经济导刊,2014(4):63-66.
[7] 杨瑞.水肥一体化营养液多路直混控制系统设计[D].保定:河北农业大学,2020.
[8] 陈超.基于模糊理论的智能水肥一体机研制[D].合肥:安徽农业大学,2019.
[9] 孔德志,孙昌权.基于模糊控制的灌溉施肥系统设计与应用[J].安徽农业科学,2016,44(36):230-232.
[10] 李帅帅,李莉,穆永航,等.基于Fuzzy-Smith控制器的营养液pH值调控系统研究[J].农业机械学报,2017,48(S1):347-352,393.
[11] 詹攀.精准配肥控制系统的设计与研究[D].重慶:西南大学,2016.
[12] 姜岩.基于物联网技术的智能水肥一体机控制系统[D].青岛:青岛理工大学,2018.
[13] JIANG Y,ZHAO J B,DUAN J,et al.Automatic control system of water and fertilizer based on fuzzy control algorithm and simulation[C]//2017 IEEE Information Technology,Networking,Electronic & Automation Control Conference(ITNEC).Chengdu,China:IEEE,2017:1671-1674.
[14] ZHANG L,WEI Y Z,FENG C P,et al.Design of water and fertilizer precision ratio system based on neural network PID[C]//2019 ASABE Annual International Meeting.St.Joseph,MI:American Society of Agricultural and Biological Engineers,2019.
[15] BI P,ZHENG J F.Study on application of grey prediction fuzzy PID control in water and fertilizer precision irrigation[C]//2014 IEEE International Conference on Computer and Information Technology.Xi’an,Chinn:IEEE,2014:789-791.
猜你喜欢
东方教育(2016年9期)2017-01-17 00:02:02
长江蔬菜·学术版(2016年12期)2017-01-12 20:54:22
南水北调与水利科技(2016年6期)2017-01-06 13:49:14
山东工业技术(2016年23期)2016-12-23 17:27:08
现代农业科技(2016年20期)2016-12-20 08:52:04
教育界·下旬(2016年8期)2016-12-14 10:35:15
现代农业科技(2016年19期)2016-12-12 15:52:38
科学与财富(2016年26期)2016-12-01 21:15:53
企业技术开发·中旬刊(2016年10期)2016-11-12 14:53:44
商场现代化(2016年19期)2016-07-29 16:25:33
