基于ECDIS 平台的船舶航行水域航线调度信息采集研究
2022-07-03 03:48:06史方敏郝永志
浙江海洋大学学报(自然科学版) 2022年3期
史方敏,郝永志,2
(1.浙江国际海运职业技术学院航海工程学院,浙江舟山 316021;2.上海海事大学商船学院,上海 201306)
全球货物贸易绝大部分都需要通过船舶运输来完成,经济一体化的发展趋势带来了航运业的变化,使航运业出现了贸易货物标准化管理、装卸、运输的趋势,推进了船舶技术的不断变革[1]。但在船舶技术变革的过程中,存在船舶航行效率较低、无法克服复杂的海上环境等多种问题[2]。针对这种情况,人们将注意力集中在怎样减少人力、物力损失以及实现智能化船舶控制等问题上,而对于航线规划等问题则缺乏关注。事实上,航线规划问题与船舶操纵智能化水平息息相关,对于实现船舶快速、经济、安全航行可以说是至关重要。为了实现船舶的智能航线规划,需要对船舶航行水域航线调度信息进行采集。国内外都十分重视对船舶航行水域航线调度信息的采集问题。在国外研究中,致力于将数据挖掘、机器学习、人工智能等技术与理论应用到航运数据智能应用与分析上,以进行船舶航行水域航线调度信息采集,金辉等[3]提出1 种基于高斯混合模型的船舶航行水域航线调度信息采集方法,主要通过高斯混合模型构建船舶航行水域航线调度信息采集模型进行船舶航行水域航线调度信息的采集。在国内,对于船舶航行水域航线调度信息采集的研究则相对起步较晚,最早开始通过借鉴国外的研究成果进行相关研究,接着主要集中于对船舶航行水域航线调度信息的捕捉与预测等方向进行研究,冉明华[4]提出一种基于DSP(digital signal processing)技术的船舶航行水域航线调度信息采集方法,主要通过DSP 技术实现船舶航行水域航线调度信息的采集。但是,在利用以上方法进行船舶航行水域航线调度信息的采集时,受轨迹数据中存在缺失值与异常数据的影响而无法进行数据压缩,导致船舶在航行过程中的航线转向点存在识别率较低的问题。因此,本文提出一种基于ECDIS 平台的船舶航行水域航线调度信息采集方法。基于Hadoop 大数据处理框架提取船舶轨迹数据,对轨迹数据进行预处理,并利用D-P 压缩方法对轨迹数据进行压缩,利用ECDIS 系统平台进行船舶航行水域航线的轨迹调度信息采集。
1 船舶航行水域航线调度信息采集
1.1 轨迹数据获取
首先获取AIS(automatic identification system)报文里的UTC 时间、船宽、船长、对水速度、对地速度、航向、船舶位置、MMSI(maritime mobile service identify)码等船舶轨迹数据[5]。利用AIS 系统(船舶自动识别系统)对船舶进行解码识别,并将其导入SHIPDB 数据库中。并对需要的船舶轨迹数据基于Hadoop 大数据处理框架进行提取[6]。根据船舶实际航行状态提取船舶轨迹数据,将原始的船舶轨迹数据序列设为T={p1,p2,p3,……pn},则具体提取步骤如下:第一步:对原始的船舶轨迹数据序列集合进行初始化处理;第二步:对原始的船舶轨迹数据序列进行遍历,一直到找到pj这一数据点,该数据点的对应航行状态是锚泊;第三步:从pj这一数据点开始向下进行遍历,一直到找到pk这一数据点,该数据点的对应航行状态是在航[7]。第四步:重新构建1 个轨迹序列s={pj,pj+1,pj+2,……pk-1},将重新构建的轨迹序列添加到原始的船舶轨迹数据序列集合中,将k 作为新的起点对第二步进行重复,一直到完成所有数据点的偏离[7]。
提取到所需的船舶轨迹数据信息如表1 所示。
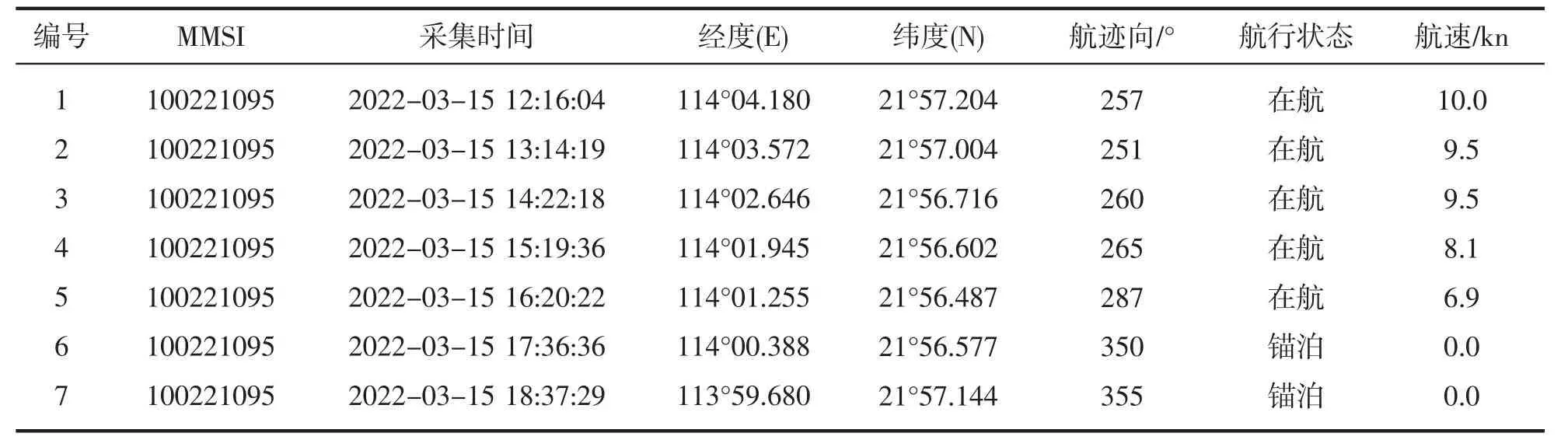
表1 提取到所需的船舶轨迹数据信息Tab.1 The required ship track data information is extracted
1.2 轨迹数据预处理
首先运用均值插补法对提取的船舶轨迹数据实施缺失值处理。将提取的船舶轨迹数据整体视为线性轨迹[8],利用缺失数据的2 个相邻的已知数据D-P 压缩缺失数据[9]。将缺失数据设为(ti,pti),其中pti代表缺失值;ti代表缺失数据所对应的时间。缺失数据的2 个相邻的已知数据分别为(tk,ptk)与(tm,ptm),利用这2 个数据点对pti进行拟合,以对缺失值进行填补。插补公式见式(1)。

接着对提取的船舶轨迹数据中的异常数据进行处理,包括轨迹点漂移情况、轨迹稀疏情况以及航线过短情况[10]。对于轨迹稀疏情况与航线过短情况需要直接放弃[11]。
对于轨迹点漂移情况,需要对其进行D-P 压缩处理,以轨迹变化情况为依据对轨迹点漂移情况进行识别[12]。将当前轨迹点设为Ti,当Ti与其前后的轨迹点距离较大时,则认为其为轨迹漂移点,通过Ti前后的轨迹点对直线进行拟合。轨迹点漂移情况及拟合后的轨迹点情况示意图如图1 所示。
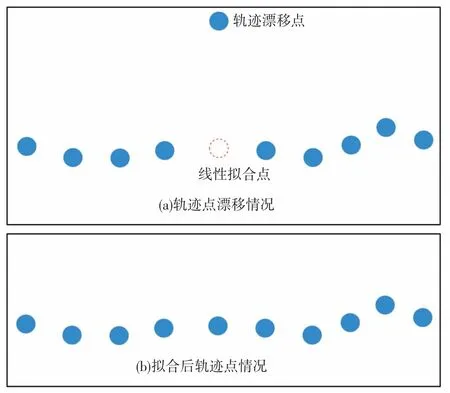
图1 轨迹点漂移情况及拟合后的轨迹点情况示意图Fig.1 The drift of track points and the sketch diagram of track points after fitting
1.3 轨迹数据压缩
接着利用D-P 压缩方法对船舶轨迹数据实施压缩处理,具体处理流程如下:
(1)对轨迹序列中各轨迹点进行逐个扫描,获取相邻子段间的平均速率和角度变化值[13]。
(2)对航向变化率或航向变化进行判断,当其超越阈值时直接存入轨迹特征点航向数据库内[14]。
(3)当航速和航向都比阈值小,对下一个轨迹点进行扫描,对其是否为最后一个船舶轨迹点进行判断[15],当确定其是最后一个船舶轨迹点,将其直接存入轨迹特征点航向数据库内,结束压缩流程;否则继续对下一个轨迹点进行扫描。
1.4 航线轨迹调度信息采集
在上述所得船舶轨迹数据的基础上,利用ECDIS 系统平台进行船舶航行水域航线的轨迹调度信息采集,从而利用采集的轨迹调度信息自动生成水域航线[16]。首先利用ECDIS 基础显示平台构建ENC(environmental noise cancellation) 数据模型,ENC 是指由海道测量机构或其他相关政府机构制定的矢量电子海图,如图2 所示。

图2 ENC 数据模型Fig.2 ENC data model
通过ENC 数据模型[17]对压缩后的船舶轨迹数据进行记录分析,采集压缩后的船舶轨迹数据中的5 种船舶航行水域航线调度记录[18],在其中提取船舶航行水域航线轨迹调度信息,具体如表2 所示。
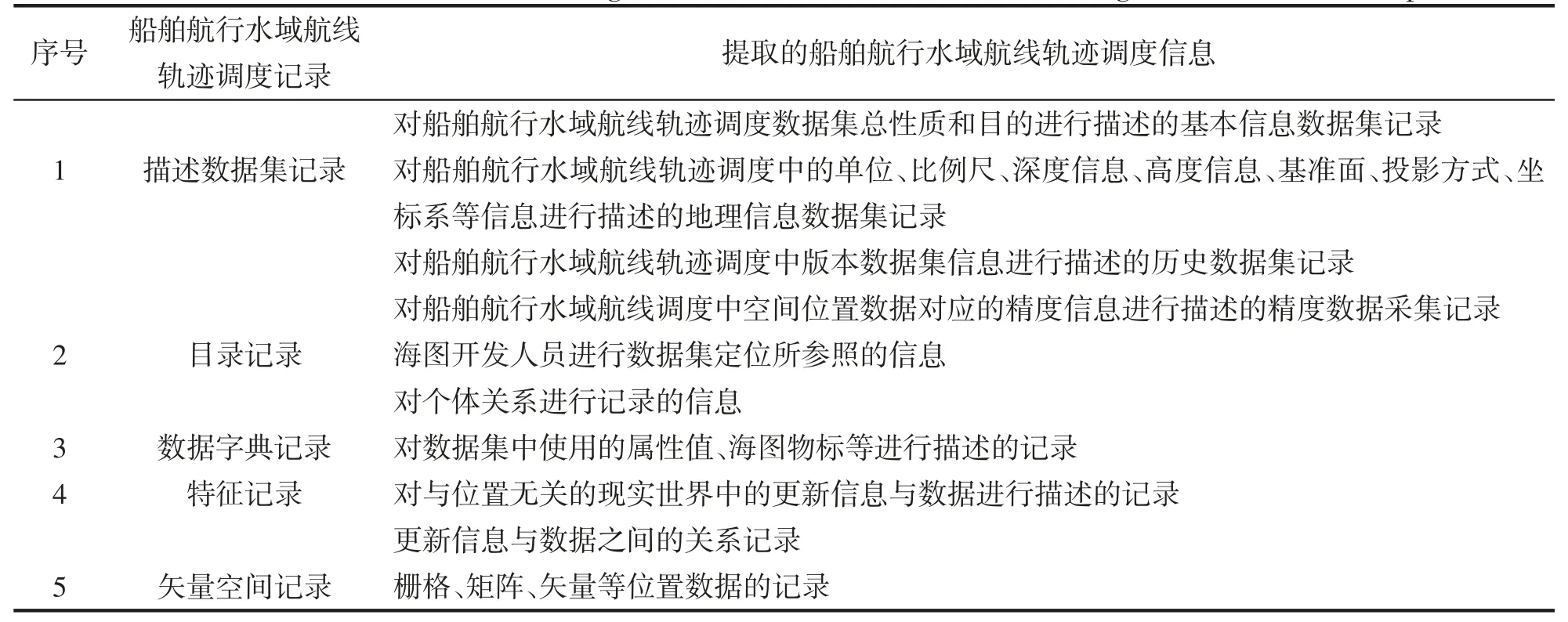
表2 提取的船舶航行水域航线轨迹调度信息Tab.2 The route track scheduling information extracted from the navigation area of the ship
2 实验研究
2.1 实验设计
为证明设计的基于ECDIS 平台的船舶航行水域航线调度信息采集方法的性能,对其进行实验验证。实验中船舶航行水域为某海峡水域,收集该海峡水域的50 248 条船舶轨迹数据作为实验数据。船舶速度、航迹向和船舶转向点是航线规划信息采集中的重要因素,统计不同船舶速度和航向数据并进行压缩筛选,匹配ENC 数据模型,从而获取水域航线轨迹调度信息。该海峡水域的最大速度、平均速度及交通流速度等相关速度数据如图3~5 所示。最大速度是指船舶在该海峡水域的最大行驶速度;平均速度是指船舶在该海峡水域的平均行驶速度;交通流速度是指船舶在该海峡水域上连续行驶形成的船舶流量速度。
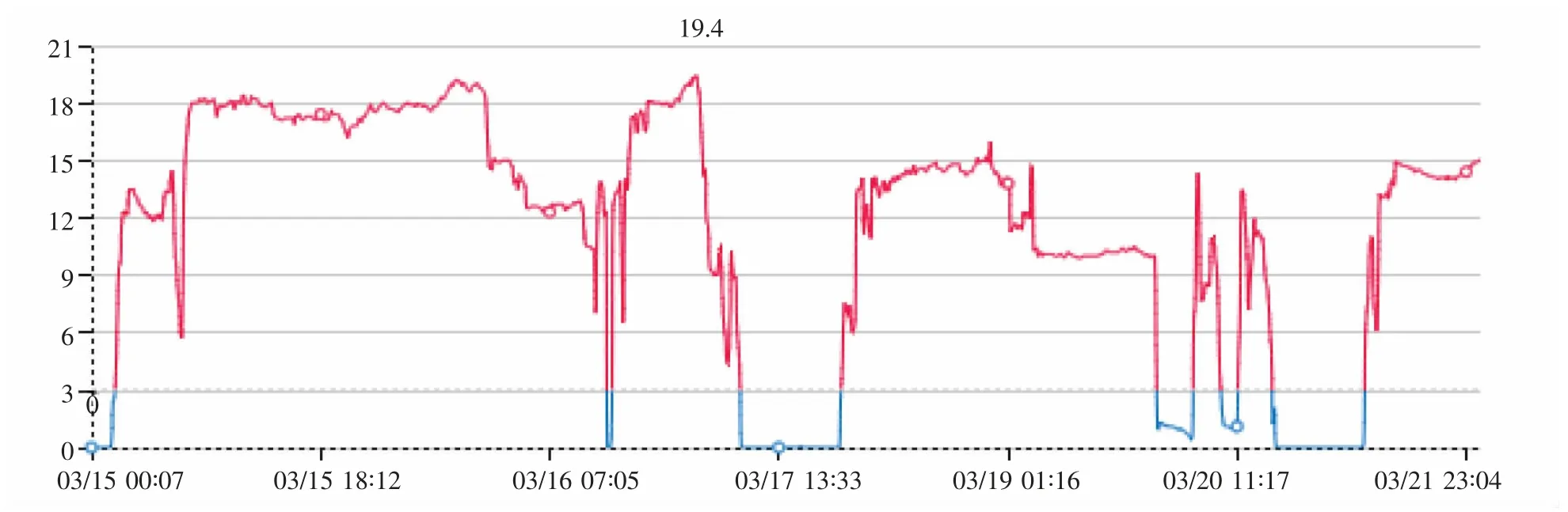
图3 该海峡水域的最大速度分布Fig.3 Maximum velocity distribution in the channel
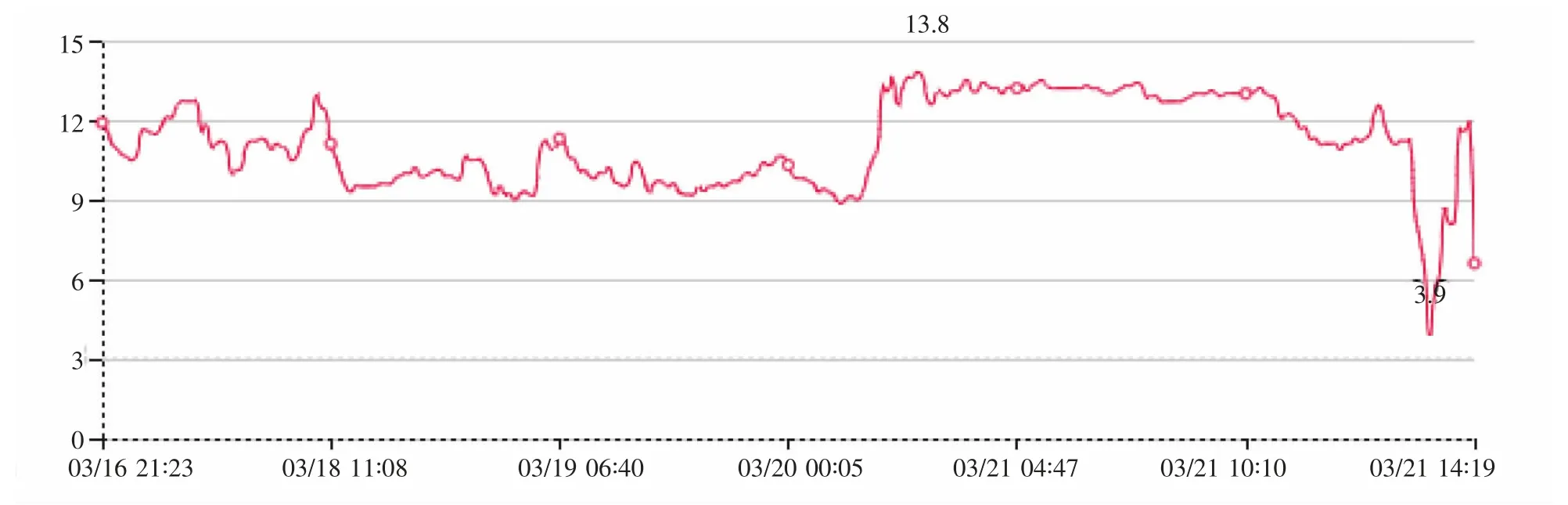
图4 该海峡水域的平均速度分布Fig.4 Mean velocity distribution in the channel

图5 该海峡水域的交通流速度分布Fig.5 Velocity distribution of traffic flow in the channel
该海峡水域内的实际速度分布具体如图6 所示。实际速度是指船舶在该海峡水域受到水流压力等因素的影响而实际航行的速度。获取该海峡水域的实际航向分布特征,具体如表3 所示。
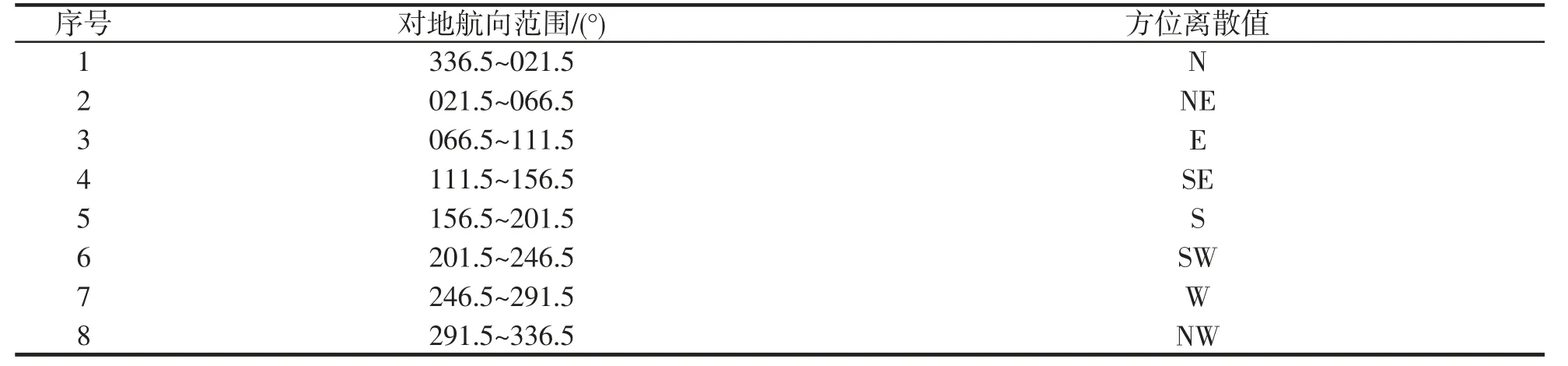
表3 该海峡水域的实际航向分布特征Tab.3 The actual course distribution characteristics of the channel waters
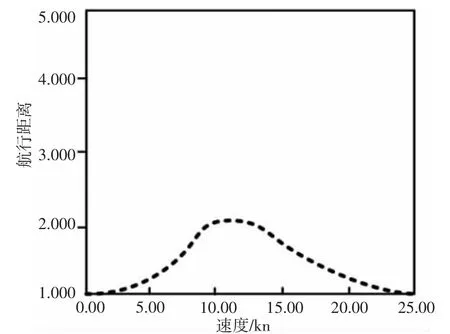
图6 该海峡水域内的实际速度分布Fig.6 The actual velocity distribution in the waters of the channel
对该海峡水域的航迹向实施统计分析,具体结果如图7 所示。
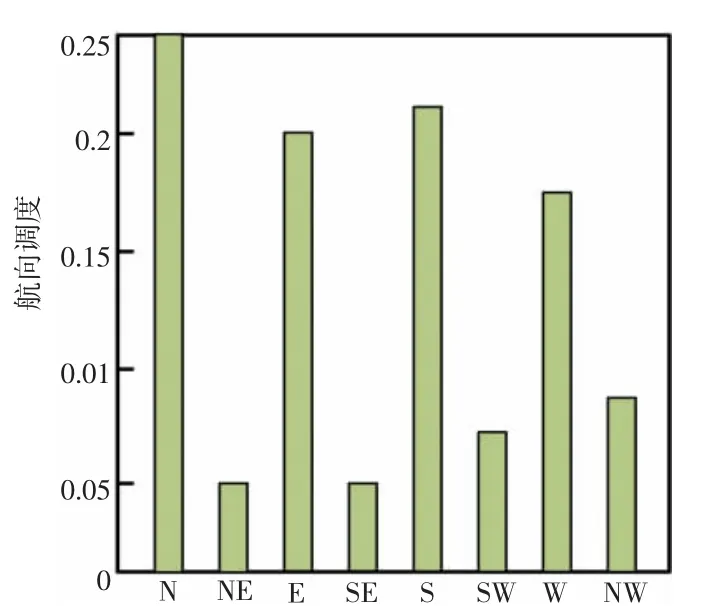
图7 航迹向统计分析结果Fig.7 Statistical analysis results of track direction
利用设计的基于ECDIS 平台的船舶航行水域航线调度信息采集方法针对该海峡水域进行船舶航行水域航线轨迹调度信息采集实验。为避免本次实验结果过于单一,将原有的2 种方法作为实验中的对比方法,分别为基于DSP 技术、基于高斯混合模型的船舶航行水域航线调度信息采集方法。DSP 技术是基于数字信号处理的船舶信息采集系统,这种方法进行航线调度信息的采集时,受轨迹数据中存在缺失值与异常数据的影响,航线转向点存在识别率较低。高斯混合模型是一个常用的描述混合密度分布的模型,通过刻画参数空间中数据的分布及其特性,用高斯概率密度函数量化事物,它是一个将事物分解为K 个基于高斯概率密度函数的线性组合而形成的模型。
运用这3 种方法进行实验,船舶在航行中转舵改变航向时的地点叫转向点,转向点识别率越高,船舶水域航线调度能力越高,对航线调度信息采集具有重要意义,选用该海峡水域内具有20~30 个船舶航线的转向点识别率数据作为对比实验数据。
2.2 实验结果分析
当船舶转向点为20~25 个时,基于ECDIS 平台的船舶航行水域航线调度信息采集方法与基于DSP 技术、基于高斯混合模型的船舶航行水域航线调度信息采集方法的航线转向点识别率对比实验数据具体如表4 所示。
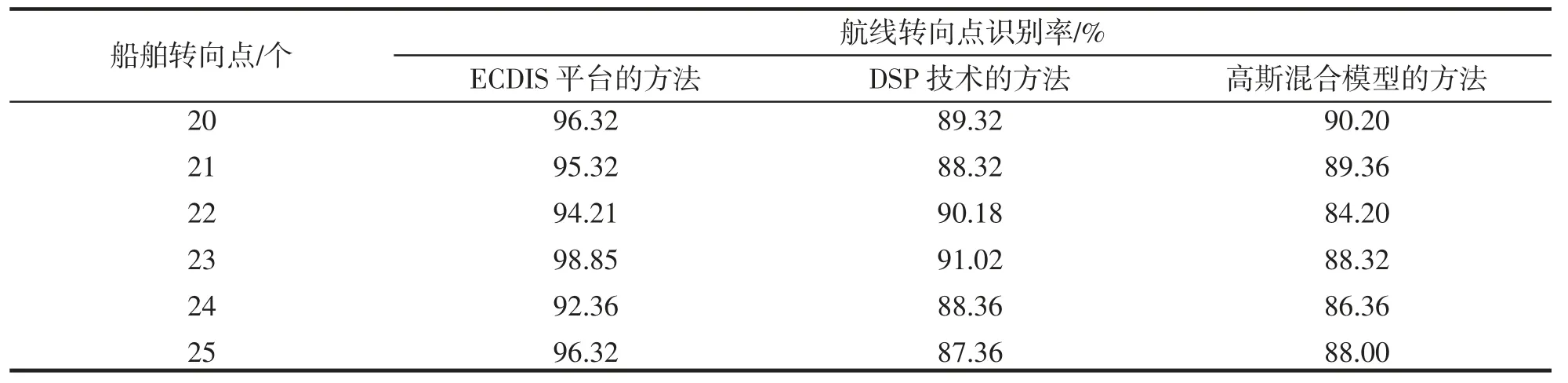
表4 航线转向点识别率对比实验数据Tab.4 Comparison experimental data of recognition rate of course turning point
根据表4 的航线转向点识别率对比实验数据可知,基于ECDIS 平台的船舶航行水域航线调度信息采集方法的航线转向点识别率普遍高于92%,相比基于DSP 技术、基于高斯混合模型的船舶航行水域航线调度信息采集方法,基于ECDIS 平台的船舶航行水域航线调度信息采集方法的航线转向点识别率较高。
当船舶转向点为26~30 个时,基于ECDIS 平台的船舶航行水域航线调度信息采集方法与基于DSP 技术、基于高斯混合模型的船舶航行水域航线调度信息采集方法的航线转向点识别率对比实验数据具体如表5 所示。
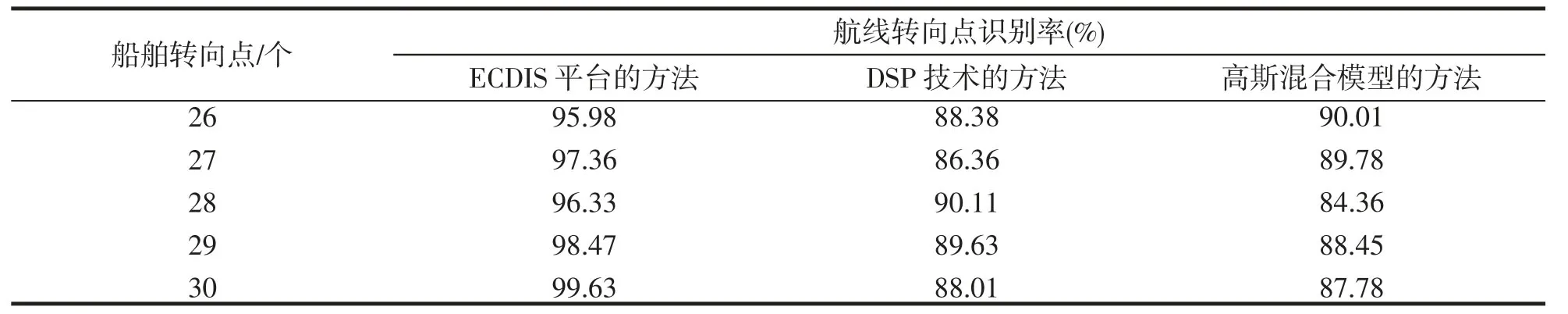
表5 航线转向点识别率对比实验数据Tab.5 Comparison experimental data of recognition rate of course turning point
由表5 的航线转向点识别率对比实验数据可知,基于ECDIS 平台的船舶航行水域航线调度信息采集方法的航线转向点识别率高于基于DSP 技术、基于高斯混合模型的船舶航行水域航线调度信息采集方法。这是因为本文方法利用ECDIS 系统平台采集船舶航行水域航线轨迹调度信息,提高航向转向点识别率。
3 结束语
本研究提出1 种基于ECDIS 平台的船舶航行水域航线调度信息采集的新方法。运用AIS 系统获取船舶实际航行轨迹数据信息,提取所需要的船舶轨迹数据进行分析,并对该数据进行预处理和压缩处理,利用ECDIS 系统平台采集船舶航行水域航线轨迹调度信息,从而实现了航线轨迹调度信息采集。最后进行实验研究,得到结果显示基于ECDIS 平台的船舶航行水域航线调度信息采集方法实现了航线转向点识别率的提升,对于船舶水域航线调度信息采集有很大意义。
猜你喜欢
心声歌刊(2021年6期)2021-02-16 01:12:32
水上消防(2020年5期)2020-12-14 07:16:14
计算机工程(2020年3期)2020-03-19 12:24:50
文史春秋(2019年11期)2020-01-15 00:44:36
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
智能城市(2018年7期)2018-07-10 08:30:00
中国交通信息化(2018年3期)2018-06-13 03:27:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
儿童故事画报·自然探秘(2016年2期)2016-03-15 05:56:32
海峡姐妹(2016年2期)2016-02-27 15:15:43