
柔性臂动力学建模与规划角加速度抑振研究
2022-06-28 09:38:14殷玉枫武奎扬
机械设计与制造 2022年6期
殷玉枫,武奎扬,张 锦,2
(1.太原科技大学机械工程学院,山西 太原 030024;2.山西交通职业技术学院,山西 太原 030031)
1 引言
柔性臂可以满足高精度、高速度的要求,所以被更多地用在精密工业机器人与空间领域,这些机构通常是高度非线性且刚柔耦合的动力学系统。产生的大量弹性振动大大降低了定位精度与稳定性。如何建立准确的动力学模型并且有效抑制臂杆的弹性振动从而达到更高的控制精度成为了国内外研究者的难题。
建立柔性臂动力学方程时,文献[2]发现,对均匀臂杆采用有限元法计算效率更高,但对于复杂程度较高的结构,常常难以求解动力学方程。文献[3]发现集中质量法条理清晰但常常难以满足高精度要求。柔性臂在高速旋转情况下,旋转所产生的附加弯矩会对臂杆单元的弯曲变形起到抑制作用发生动力刚化效应。动力学建模时,经常附加动力刚度项。拉格朗日方程形式简便利于高速求解,目前将柔性臂看成简支梁,根据拉格朗日方程建立动力学方程的方法较为常见[4]。
机械臂抑振主要从控制算法与规划轨迹两个方面进行研究[1]。传统单一算法很难直接用在柔性机器人上,文献[5]采用基于神经网络的PD控制方法研究柔性机器人。文献[8]采用力矩反馈控制方法对柔性机械臂进行抑振研究。文献[10]把机械臂位移浮动值作为控制量并构造多项式轨迹来对双连杆柔性杆进行优化。文献[6]将正弦-梯形基函数作为柔性臂关节角加速度来进行抑振研究。
通过控制算法来抑制振动需要测量出柔性杆弹性振动的状态变量,而轨迹规划则不需要对路径形状进行描述,只需要对起点和终点的位姿进行规划[9]。抑振的效果上来看,规划角加速度是更加直接有效的方法。为此,科研人员考虑动力刚化效应,建立了末端含负载的动力学模型,以末端振动作为优化对象,用多项式插值结合正弦-梯形叠加基函数构造出了新的角加速度规划函数,通过规划机械臂角加速度来进行振动抑制研究。分别以五次多项式插值函数和优化角加速度规划函数作为输入进行数值仿真对比研究。
2 动力学模型建立
2.1 假设模态法
柔性臂的振动分为杆沿杆方向的纵向振动与垂直于杆方向的横向振动和扭曲振动。当柔性杆件是细长杆或扁平长杆时,往往看成是欧拉伯努利梁,忽略剪切和扭曲给梁带来的变形,只考虑弯曲变形,简支梁是欧拉-伯努利梁中的一种。将柔性臂看成简支梁,梁的变形,如图1所示。
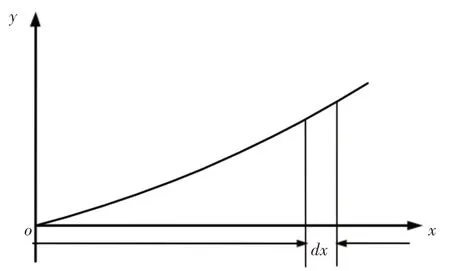
图1 梁的变形Fig.1 Beam Deformation
简支梁振型函数为:

由于振动量主要由低阶振动决定,为了简化计算通常还要进行截断处理,即将梁的变形简化为:式中:n—保留模态数或者简称模态数,在柔性臂建模过程中一般

取前两阶。两连杆振动变形v1和v2可简化描述为:

2.2 建立线性模型
对双连杆柔性臂采用割线坐标法描述,如图2所示。
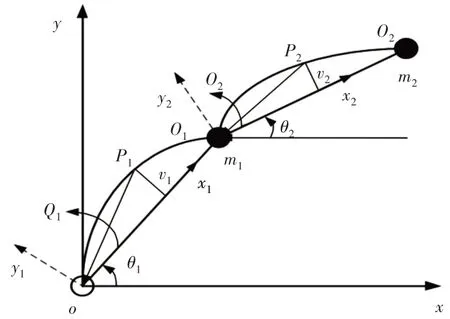
图2 双连杆柔性臂模型Fig.2 Two-link Flexible Arm Model
图中:xoy—基础坐标系,x1oy1和x2o1y2为漂浮坐标系;θ1、θ2—关节转角;L1、L2—虚拟刚性臂长度;m1、m2—末端负载;M1、M2—柔性杆质量;v1、v2—柔性杆横向振动变形;ρ1、ρ2—线密度;A1、A2—横截面积。
两柔性杆上任意点P1、P2在xoy中的坐标为:
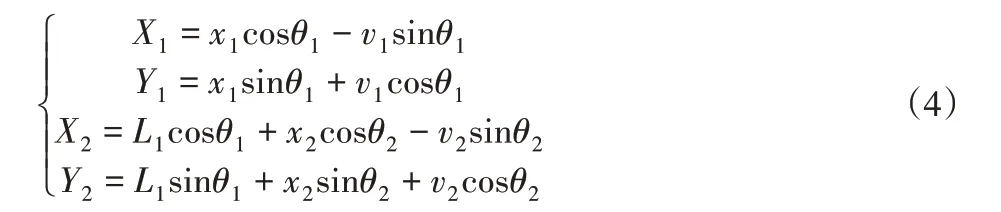
可得两连杆柔性臂的动能表达式为:
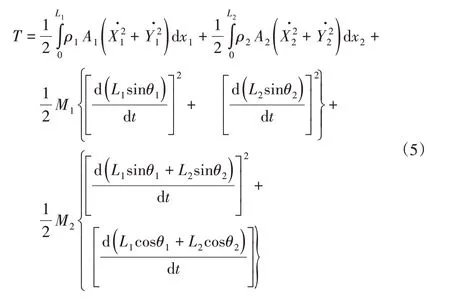
v1和v2参考(3)近似取两阶模态,得弹性势能表达式为:

将T,V代入拉格朗日方程得:

采用悬臂梁二阶模态,代入式(7)得动力学方程:

式中:q—广义坐标向量;Q—两输入转矩;M—惯性矩阵;H—哥氏力和离心力项;K—刚度矩阵;B—输入矩阵;G—重力项。柔性臂在水平面运动,重力势能不变,所以重力项G为0。
在计算时候应该注意,关节O(1肘关节)处的驱动力矩的作用是使两杆的相对夹角发生变化,出现在动力学方程中的θ1、θ2为绝对角度,因此例如对应于θ1的广义力为Q1-Q2,而不是Q1。
2.3 建立动力刚化模型
现有关于机械臂耦合作用的研究中,大多没有考虑高速旋转带来的刚化效应。柔性臂杆的纵向变形会使横向变形减小,这是导致柔性臂产生动力刚化的原因。结合式(5)与式(6),Hamilton变分原理可以表示为:

式中:L—Lagrange函数;Wτ—外力所做虚功(i≠j)。由式(9)可以导出:
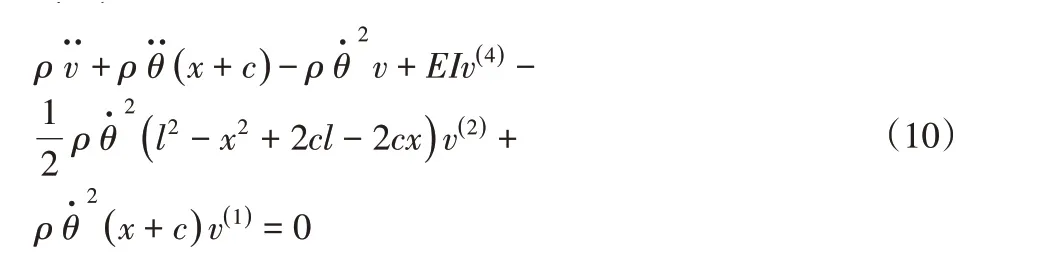
式中:ρ—臂杆线密度;c—点P到中心O的距离;x—单位质量dm到点P的距离;L—臂杆长度。传统线性模型是通过对式(10)简化得到,其方程为:

对v分离变量处理,设:

将其代入式(11)并将φ和q移到方程两边,可得:

式中:ω—臂杆振动频率,式(11)边界条件可简化为:

式(13)可以转化为:

式中:φi、φj—第i阶振动阵型、第j阶振动阵型;ωi、ωj—第i阶振动频率、第j阶振动频率。将φi代入式(15),并在两边同时乘以φj积分可得:

结合边界条件式(14)可得:

同理得:

式(17)减去式(18)可得:


可得臂杆模态满足正交性,变形v可以表示为:

式中:φ—臂杆的模态向量;q—模态坐标。将式(21)代入式(10),两边同乘φ进行积分,再结合式(16)与式(20)正交性化简可得:

构造附加的动力刚度项,通过考虑运动中臂杆梁的轴向力对横向弹性振动产生的影响,计入动力刚化的影响,建立了考虑柔性臂动力刚化效应的动力学方程。
2.4 动力学模型验证
为了验证所建立模型的有效性,对建立的模型进行动力学求解,为了保证柔性臂处于相同环境,两杆各个参数取和文献[7]完全相同的值。设定参数:两杆臂长L1=L2=0.75m,两连杆质量M1=1.4kg、M2=1.4kg,连杆刚度E1I1=1220N·m、E2I2=218N·m,载荷质量m1=2.5kg、m2=2.75kg,两杆横截面积分别为A1=60×15×10-6m2、A2=40×10×10-6m2。
假设初始时刻,柔性臂水平放置,关节夹角为零,变形为零,初始条件:在0时刻角度和角速度都为0。关节转角随时间变化θ和两杆中点变形v1、v2仿真结果,如图3所示。
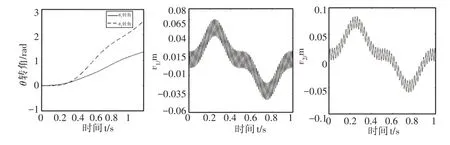
图3 仿真验证Fig.3 Simulation
观察图3仿真结果变化情况并与文献[7]中的仿真结构进行对比,对仿真结果分析发现,动力学方程附加动力刚化项后,从两杆转角随时间的变化和两杆中点变形情况来看,总体变化趋势以及具体数值基本一致。可以确定所建动力学模型可以较为准确地反映出柔性臂的动力学情况,可以用于进行加速度轨迹规划。
3 轨迹规划
柔性臂工作情况复杂,为了保证任务顺利完成,应提前对其进行合理的路径轨迹规划。轨迹规划是为了使机械臂在运动时,获得平滑连续的角加速度且峰值尽量小,避免刚性冲击,减小机械臂的弹性振动,提高末端精度[9]。
3.1 常规轨迹规划
进行规划时,起始位置与终止位置的位姿需要进行设定,计算出各个关节转角的起始角度。采用五次多项式插值轨迹规划使计算更加简便,只需保证在时间区间内机械臂各个位移、速度、加速度连续。在运动过程中,设定末端P点在0时刻起始位置是θ0,在tf时的终止位置是θf,两点间存在多条插值曲线,假设五次多项式插值函数为:

为保证平稳运动,轨迹函数需要满足以下条件:

则可求得五次多项式系数c0、c1、c2、c3、c4、c5的值。假定机械臂末端运动轨迹为一个正圆,水平位置作为初始位置,经过6π秒,机械臂末端正好转过一周。
3.2 加速度优化轨迹规划
单一曲线规划都会产生刚性或柔性冲击,难以满足要求,需要将多类曲线叠加构造成新的规划曲线。五次多项式轨迹计算简单,但往往峰值较大,会伴随较大的冲击振动。正弦-梯形曲线光滑且连续,伴随产生的冲击也较小,但需选择合适的系数aNi计算较为繁琐,因此选择合适的阶次n并且结合五次插值多项式,这样就能够获得幅值增加不大同时又较为平滑的加速度曲线函数,通过减小惯性力使臂杆能够平稳、精确的到达指定位置[9]。构造正弦-梯形函数(ft):

正弦-梯形基函数叠加公式为:

式中:-1≤ani≤1,选择合适的阶次n将正弦-梯形函数与五次多项式相结合,因为五次多项式求加速度所得为三次多项式,取a0=2c2、a1=6c3、a21=12c4、a22=20c5,可以通过调节T1、T2和H的值来得到各种函数,从而能够叠加出不同的规划加速度函数曲线来满足机械臂运动要求。
角加速度叠加规划曲线为:

4 仿真及结果分析
4.1 仿真计算
为了研究不同规划曲线对柔性臂杆的抑振效果,依据上述动力学方程,分别以五次多项式规划函数和角加速度叠加规划函数作为输入进行仿真。
仿真数据:L1=1.5m、L2=1.5m,m1=6kg、m2=6kg,M1=1.4kg、M2=0.62kg,A1=60×15×10-6m2,A2=40×10×10-6m2,E1I1=1220N·m、E2I2=218N·m,H=2,T1=2,T2=4π,T=6π。假定P点的轨迹为半径1m的圆,π起始位置为水平方向。则五次多项式规划函数为:

叠加角加速度规划函数为:

由于已知运动规划轨迹即各个关节的角加速度,要求解柔性臂振动情况,需要对所建立的动力学方程进行逆向求解,动力学方程复杂且高度非线性,很难求得解析解,因此利用matlab来求其数值解。
将加速度规划函数先代入式(22)求出两杆的模态坐标a1、b1、a2、b2。运用matlab中的ode45进行求解,首先建立各个系数矩阵的自定义函数,然后设置[t,y]=ode45(@mydy,tspan,y0),y0即为t=0时刻规划函数的数值,求解时间范围为0到12π。
其中0到6π输入加速度为规划函数,6π到12π输入调为0,观察停止驱动后的柔性臂杆残余振动情况。
将五次多项式插值规划函数和优化角加速度函数作为输入分别进行仿真求解。可以得到数值解,插值规划所得数值解,如图4所示。优化角加速度规划所得数值解,如图5所示。
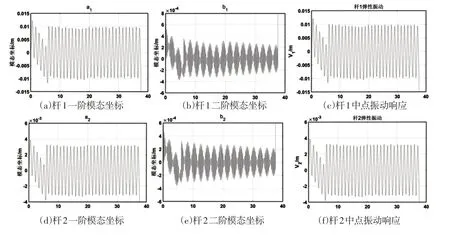
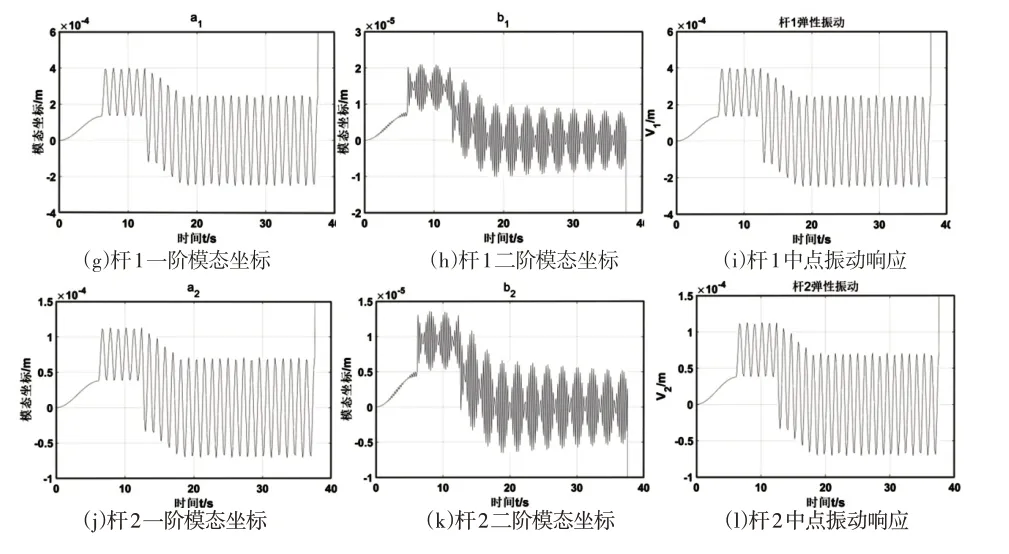
图5 优化角加速度规划Fig.5 Optimize Angular Acceleration
4.2 结果分析
从模态坐标响应来看,不论哪种规划所得模态响应,一阶模态响应远远大过二阶模态响应,符合振动描述时低阶模态起主要作用的理论[9],所以在柔性臂建模中一般取前两阶模态。
从两种规划函数所得模态坐标来分析,叠加角加速度函数所得的每根杆的各阶模态响应与对应五次插值所得模态响应相比都有大幅度降低。其中杆1的二阶模态和杆2的一、二阶模态在不同基函数规划下都相差了不止10倍,而杆1的一阶模态更是相差了约100倍,这是因为在弹性振动中一阶模态响应起主要作用,并且O(1肘关节)处的驱动力矩作用是使两杆的夹角发生相对变化,所以在进行抑振优化时,效果也更为明显。从杆中点弹性振动情况上看,经过叠加优化后杆1和杆2的弹性振动以及停止驱动后的残余振动都得到了大幅度的抑制。与五次多项式规划相比,角加速度经过叠加规划后,末端振动大幅度减小。由此可以证明叠加角加速度规划方法,可以有效抑制柔性臂杆振动。
5 结论
(1)利用Hamilton变分原理建立微分方程,用假设模态法描述柔性杆变形,考虑杆的横向变形对纵向变形的影响,推导出含附加动力刚化项的动力学方程。对传统的零次模型进行了完善,可用于高速旋转的柔性杆系统分析研究。新建的动力学模型可以较为准确地描述和反映出柔性杆臂动态特性,为进一步的加速度规划和振动抑制研究奠定基础。
(2)将振动抑制问题转变为减小杆臂模态坐标响应问题,通过对比不同规划情况下的前两阶模态坐标得出抑振效果,使研究过程以具体化、数据化的形式呈现。
(3)将优化角加速度规划应用于所建动力学模型,与五次多项式规划相比,振动抑制效果更加良好。减小了振动冲击,使柔性臂各个关节能连续平稳运行,提高了定位精度。
(4)在五次多项式插值规划下,所求角加速度为三次多项式,将三次多项式各项系数作为正弦-梯形叠加函数的系数,将五次多项式轨迹规划与正弦-梯形基函数相结合,通过调整基函数幅值与变化周期,构造出幅值较小且平滑新的关节角优化角加速度。新的规划角加速度既融合了多项式规划的计算简便易操作特点,又结合了正弦-梯形叠加函数,使获得的角加速度连续且平缓。
(5)研究中所用的动力学模型都是建立在理想情况下,实际中很难获得准确的数值。仅从原理上证明了方法的有效性。但由于参数误差客观存在,结合实验进行研究会更加接近实际情况。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
液压与气动(2020年4期)2020-04-10 07:38:52
现代装饰(2018年5期)2018-05-26 09:09:39
新课程·下旬(2018年10期)2018-01-28 10:56:30
中国三峡(2017年2期)2017-06-09 08:15:29
计量学报(2014年3期)2014-06-07 10:02:35
