
应用动态耦合法的车辆侧风稳定性研究
2022-06-28 09:36:56汪怡平张子一
机械设计与制造 2022年6期
汪怡平,张子一
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北 武汉 430070;3.甘肃建投重工科技有限公司,甘肃省专用汽车工程研究中心,甘肃 兰州 730050)
1 引言
侧风环境下车辆高速通过桥塔时,桥塔处的绕流和脱落涡会影响车辆的行驶稳定性[1]。车辆周围不断变化的流场产生的瞬态气动力作用在车辆上,会引起车辆产生横向位移和横摆角,车辆的稳定性恶化,乘员的舒适性与安全性受到严重影响[2]。随着高级驾驶辅助技术的发展,主动校正和自动转向受到越来越多的关注。研究侧风环境下车辆气动力以及动态响应的变化规律,将为高级驾驶辅助系统的研发提供理论依据[3]。
因此,深入研究侧风环境下车辆通过桥塔时的流场变化、气动性能和动态响应,具有重要意义。
对于风-桥路况下车辆的气动特性与稳定性,国内外学者通过道路、风洞试验和数值模拟开展了广泛研究。道路试验能够真实地获取车辆在侧风下的动态响应。但道路测试无法用于早期无原型样车的评估分析。文献[4]利用风洞试验测量桥塔周围不同位置静止车辆的气动力和表面压力。文献[5]利用风洞中移动轿车模型模拟轿车通过桥塔尾迹获得瞬态气动力。但风洞试验成本高且不能提供足够的流场信息。计算流体力学(CFD)能提高瞬态三维流场信息成为克服实验局限性的一个有效选择。文献[6]利用CFD 方法获得侧风环境下通过桥塔的重型卡车的气动特性。然而,以往对于车辆在侧风环境下通过桥塔的气动特性研究,车辆运动轨迹是预设的,即将CFD 得到的气动力加载到动力学模型,从而得到动力响应。但实际行车时,当车辆在侧风环境下通过桥塔时,流场突变引起的气动力变化将引起横向位移、横摆角速度等动态响应,进而引起气动力的大小和方向发生变化,最终再次影响车辆的动力学响应。
因此,侧风环境下车辆通过桥塔区域时,必须考虑动力学响应和气动响应之间的相互作用。文献[7]耦合空气动力学与6自由度的动力学模型对汽车的气动特性进行了分析。研究表明车辆姿态变化会产生不稳定的气动力和力矩,动态耦合法具有广泛的适应性,能够有效研究侧风环境等复杂条件下的车辆气动特性。
采用CFD与多体系统动力学(MBD)耦合的动态耦合法。通过改变风压中心位置,验证汽车动力学模型的鲁棒性。通过对比风洞试验中不同偏航角下的气动阻力系数,验证CFD的可靠性。深入分析动态耦合法中流场相关信息,基于气动力与车辆运动之间相互作用机理研究车辆侧风稳定性。
2 耦合方法
车辆侧风行驶状况可以视作多个物理量之间的耦合作用:周围的流场、车辆运动等。按照耦合变量的求解方式,可以将耦合方法分为强耦合、弱耦合。强耦合方法通过单元矩阵或荷载向量把耦合作用构造到控制方程中,然后对控制方程直接求解。弱耦合方法是在每一步内分别对CFD和MBD求解,通过把第一个物理场的结果作为外荷载加于第二个物理场来实现两个场的耦合,本文的研究均采用弱耦合方式。针对汽车侧风稳定性的研究,目前主要采用静态耦合法,其原理,如图1所示。

图1 静态耦合法示意图Fig.1 Static Coupling Method
首先由CFD模型进行瞬态计算,得到不同时刻的气动力,然后将数据输入MBD模型,计算得到气动力作用下的车辆运动参数,并评价车辆的侧风稳定性。然而,静态耦合法中,车辆的运动是预设的,忽略了气动力对汽车姿态的影响。
所以,该方法进行车辆侧风稳定性分析所得结论与真实情况有一定的差异。针对上述问题,采用动态耦合法,其原理,如图2所示。该方法在CFD模型和MBD模型中分别加载侧风模型和道路模型,并实时交换气动力与动力学响应数据。整个动态耦合流程,如图3所示。
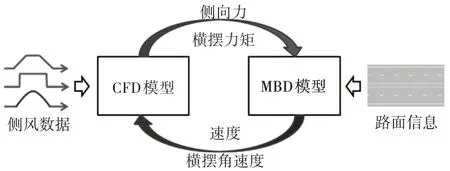
图2 动态耦合法示意图Fig.2 Dynamic Coupling Method

图3 动态耦合法仿真流程Fig.3 Flow Chart of the Dynamic Coupling Process
在耦合前,CFD和MBD模型分别单独计算0.5s,以获得稳定的气动力和动力学响应。然后开始耦合,实时交换气动力和运动参数。计算过程如下:将CFD模型计算得到的侧向力和横摆力矩输入MBD模型;MBD模型计算车辆动态响应并将横摆角速度和侧向速度反馈给CFD模型;利用CFD计算车辆在新位置的侧向力和横摆力矩。通过动态耦合法,CFD模型中车辆气动力变化与MBD模型中车身姿态变化得到统一,计算结果更加真实。
2.1 湍流模型
车辆周围的流场是三维、瞬态、湍流、不可压缩的。选取RNG k-ε湍流模型进行瞬态计算,其控制方程如下:
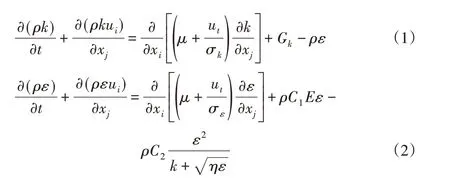
式中:ρ—流体密度;xi、xj—坐标轴分量;μ—流体粘度;t—时间;ut—时刻的速度;ui—速度分量;k—湍流动能系数;σ—涡黏性系数。σk=σɛ=1.39是k与ε的湍流普朗特施密特数,Gk是关于k的经验公式。E、C1、C2、η为常数,由实验确定。
2.2 重叠网格法
采用重叠网格技术实现车辆在桥梁上的运动[8],其连续性方程和动量方程如下所示:
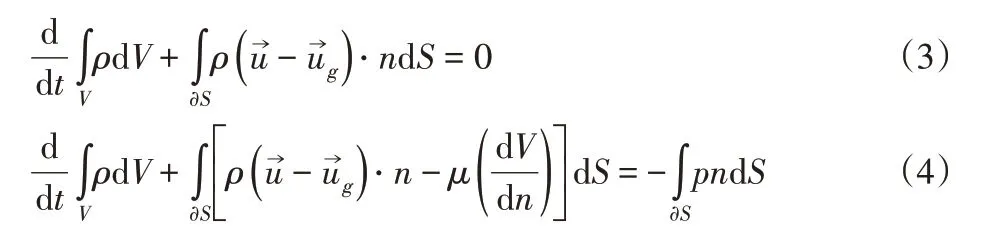
式中:t—时间;ρ—流体密度;p—压强;μ—动力粘度;dS、dV—表面积和控制体积;n—控制体表面指向外面的法向量;u—流速矢量;ug—网格运动速度矢量即MBD 模型中的车辆速度。网格运动速度矢量与网格体积变化应该满足空间守恒律:

2.3 动力学响应计算
基于拉格朗日方程建立MBD模型,车辆模型由各子系统和约束组成。在全局坐标系中,每个约束方程可表示为:

式中:q—广义坐标系{q}T={x y zψθφ}。欧拉角以z-x-z形式表示;Ck—部件连接处的约束函数;λk—拉格朗日乘数;m—作用部件之间节点的约束数量。每个部件与相应约束节点由约束方程联结在一起,动力学方程如下:

式中:Φq—约束方程矩阵;Fq—作用力矩阵。
3 数值计算
3.1 几何建模
采用一款全尺寸轿车模型,如图4所示。车辆长L=5.013m,宽W=1.978m,高H=1.458m。CFD 模型与CBD 模型采用相同的坐标系。坐标原点位于重心处(GG)。为提高计算效率,对车身附件进行了简化。

图4 车辆三维模型Fig.4 Three-Dimensional Model of the Sedan
选取带有桥塔的部分桥梁路段作为车辆行驶环境,如图5所示。为提高计算效率,对桥梁模型进行简化,忽略拉索、护栏等部件。桥梁模型长La=170m。桥面的宽度Wa=28m,桥面高度Hb=25m。桥塔宽度Wb=10m,高度Hb=50m。
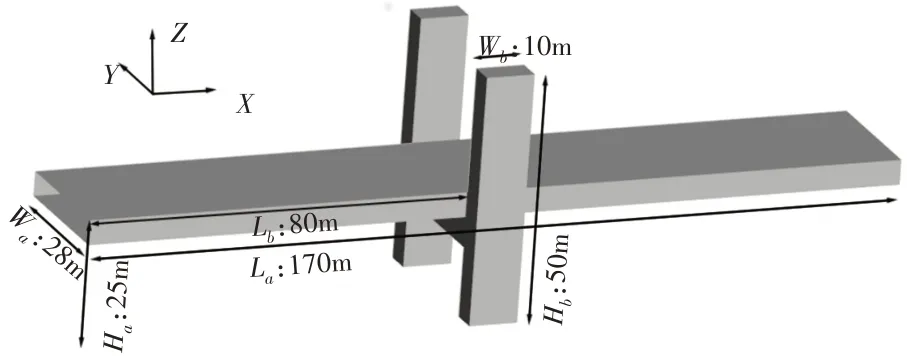
图5 桥梁三维模型Fig.5 Three-Dimensional Model of the Bridge
车辆在桥面上的初始位置,如图6 所示。车辆距离桥塔48m。设vi为车辆行驶速度,全程行驶3.5s。侧风垂直于桥梁轴线,设vr为侧风速度。

图6 车辆行驶过程Fig.6 The Process of Driving on the Cross-Sea Bridge Deck
3.2 计算域与边界条件
对桥梁距离速度入口、压力出口的净宽、桥梁上方的净高、桥梁离地间隙进行不同设置以考察计算域尺度对计算结果的影响,如图7所示。不同的计算域方案,如表1所示。因桥梁上各桥塔相距较远,彼此之间气流干扰较小,为减少计算量,选取一段桥塔,计算域的长度均为170m,设桥宽为特征长度B。
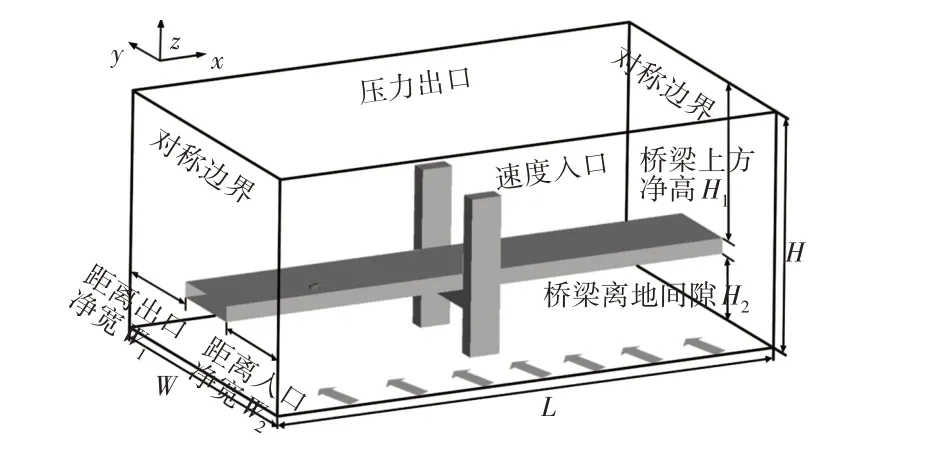
图7 计算域Fig.7 Computational Domain
侧风入口为速度入口,出口边界为压力出口,侧面边界和顶部边界为对称边界,桥梁的表面、地面、车辆模型为壁面边界。车辆以30m/s速度行驶,风速为10m/s,不同尺度计算域计算得到的侧向力,如表1所示。当入口和出口的净宽等于1.0B,车辆上方的净高等于2.0B,桥下的净空等于1.0B时,计算结果对计算域大小的依赖性消失。因此最终选取的计算域长度为170m,宽度为84m,高度为88m。
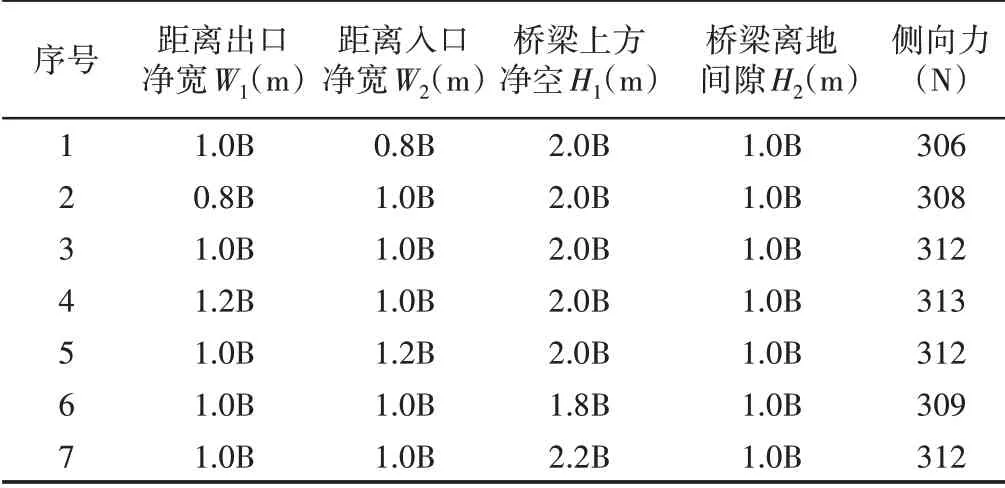
表1 不同计算域的车辆侧向力Tab.1 Aerodynamic Force with Different Computational Domain
流场计算中,车辆运动姿态的变化通过重叠网格技术实现。在重叠网格技术中,网格分为两部分,背景网格区域(静止固定的环境域)与重叠网格区域(包含车辆车体的运动域),如图8所示。

图8 车辆周围网格横向截面图Fig.8 Mesh Around Sedan
采用STAR-CCM在计算域内生成六面体网格。为保证计算精度,对车辆和桥梁进行网格加密。车身表面和重叠网格区域的面网格尺寸范围为(20~180)mm。为模拟附面层流动,在车身表面拉伸出4层棱柱网格,如图9所示。
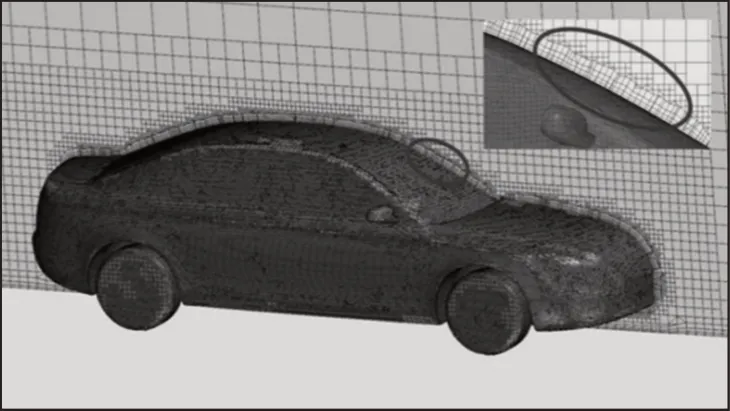
图9 车身表面网格Fig.9 Surface Mesh of Sedan
重叠网格区域与背景网格区域之间交界面的网格尺寸大小设置为相同的数量级,以确保瞬态数值模拟计算的稳定性。瞬态计算时间时间步设置为0.001s。
3.3 多体系统动力学模型
汽车是一个多自由度的非线性连续体振动系统。采用的MBD模型由10个子系统构成,包括车身刚体,前后悬架,前后轮胎,制动,动力和转向。前悬架采用麦弗逊独立悬架,转向采用液压助力齿轮系转向系统。应用Magic Formula轮胎模型模拟轮胎动力学模型。整车动力学模型共计85个自由度。根据实际车型的关键参数调整模型的前后轮距、轴距、四轮定位参数等。整车的主参数,如表2所示。整车虚拟样机模型,如图10所示。计算仿真中,汽车方向盘锁死。CFD计算得到的侧向力作用于MBD模型重心处。轮胎采用基于Pacejka89模型,参数为185/65R15。MBD计算的时间步长为0.001s。

表2 车辆整车参数Tab.2 Vehicle Parameters for Multi-Body Dynamic Mode
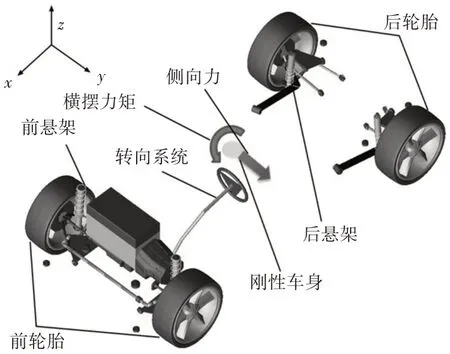
图10 汽车多体系统动力学模型Fig.10 Vehicle Multi-Body Dynamic Model
4 模型验证
4.1 CFD仿真验证
在某大学HD-2风洞实验室进行1:3的车辆模型风洞试验,验证CFD 仿真的准确性,如图11所示。风洞风速为30m/s。测量车辆不同横摆角下的气动力和横摆力矩。横摆角在-15°至+15°之间变化,每隔3°记录一次数据。

图11 1:3的轿车模型风洞试验型Fig.11 A 1:3 Scale Model Wind Tunnel Tests
实验和仿真数据对比表明,如图12所示。数值模拟与实验结果具有良好的一致性。气动阻力系数Cd随横摆角增大而增大,当横摆角超过9°过时,阻力系数Cd增量逐渐减小,气动侧向力系数随横摆角呈线性变化。

图12 风洞实验结果与仿真计算结果的比较Fig.12 The Comparisons Between Experiment and Computational Results
4.2 MBD模型鲁棒性验证
作用在车身上的侧向力会使车辆发生偏航和侧滑。在研究中,首先在车辆的重心(CG)处施加阶跃型侧向力(SLF)。然后改变SLF的作用点,计算车辆相应的动力响应。如果动态响应符合预期,则MBD模型具有良好的鲁棒性。
侧向力作用点位于重心的后方时,可以有效提高车辆侧风稳定性。鲁棒性验证中,SLF 的作用点位置如下(:1)向前移动150mm 和300mm(分别用SLFfwd150 和SLFfwd300 表示);(2)向后移动150mm 和300mm(分别用SLFbwd150 和SLFbwd300 表示);(3)向上移动200mm和400mm(分别用SLFuwd200和SLFuwd400 表示);向下移动200mm 和400mm(分别用SLFdwd200 和SLFdwd400表示)。侧向力作用在不同位置的侧向位移,如图13(a)所示。当侧向力施力点向重心后移动时,车辆的侧向位移减小,这与理论结果一致。这表明MBD模型能较好地捕捉XOY平面的运动趋势。侧向力作用在不同作用点下的侧倾角,如图13(b)所示。侧向力作用点上移产生负的侧倾力矩,风压中心越高,侧倾力矩越大,侧向力与侧倾力矩共同作用下的侧倾角越大,将增加车辆的侧倾运动。这表明MBD模型能较好地捕捉YOZ平面的运动趋势。因此,该车辆多体系统动力学模型具有较强的鲁棒性。

图13 风压中心移动对车辆运动的影响Fig.13 Effect of Center of Wind Pressure Movement on Vehicle Movement
5 结果分析
采用静态和动态耦合法计算得到的侧风环境下汽车通过桥塔区域的气动力变化,如图14所示。结果表明,静态和动态耦合得到的侧向力与横摆力矩的变化规律基本一致。在t=1.75s时,车辆驶入桥塔区域,侧风被桥塔遮挡,车辆受到的侧向力与横摆力矩大幅降低。在t=2s时,车辆驶离桥塔区域,桥塔尾流对侧向力和横摆力矩的影响减小。2s以后,车辆只受到侧风作用,气动力变化趋于稳定。动态耦合法获得的侧向力和横摆力矩较静态耦合法更大。原因在于,车辆此前受到侧风与桥塔尾流作用,气动力变化引起车辆横向位移、横摆角速度、车身姿态等动态响应。进而又使气动力的大小和方向不断变化。因车辆姿态发生变化,动态耦合法较静态耦合法,车辆受到的侧向力与横摆力矩更大。
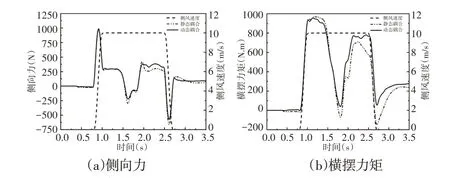
图14 侧向力与横摆力矩随时间变化曲线Fig.14 The Lateral Force and Yaw Moment
采用静态耦合和动态耦合法计算得到的侧风环境下车辆通过桥塔区域的动力学响应,如图15所示。

图15 横摆角与侧向位移随时间变化曲线Fig.15 The Yaw Angle and Lateral Displacement
结果表明,车辆在横摆力矩的作用下产生了横摆运动。横摆角持续增大直至侧风消失。在1.75s 时,车辆驶入桥塔区域,侧风被桥塔遮挡,车辆受到的侧向力与横摆力矩大幅减小。受侧风影响,车身姿态持续发生变化。动态耦合法因考虑车身姿态与气动力的相互作用,车辆受到较大的侧向力与横摆力矩。因此,动态耦合法较静态耦合法,车辆横摆角度更大。侧向位移是评价车辆侧风稳定性的重要参数。随着横摆角的增大,汽车前进速度在侧向的分速度也逐渐增大。此外,车辆在侧向力的作用下产生侧向速度,车辆侧向位移持续增大。动态耦合法较静态耦合法,车辆侧向位移更大。并且随着时间累积,两者的差距持续增大。在t=3.5s 时,动态耦合法下的侧向位移达到1.73m,严重危及车辆和驾驶员的安全。动态耦合法中,计算域水平截面不同时刻的压力云图以及汽车迎风侧与背风侧的压力云图,如图16、图17所示。
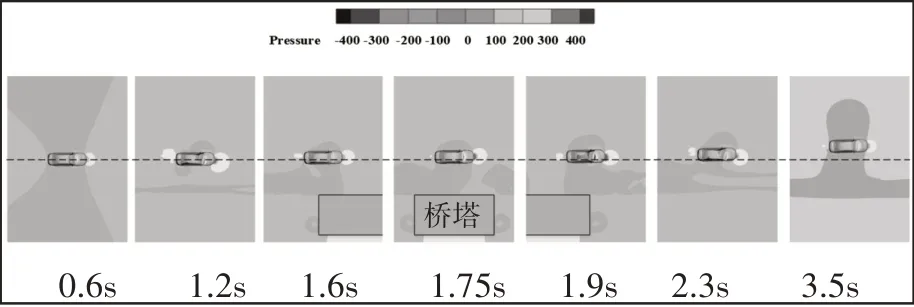
图16 动态耦合法各个时刻x-y方向压力云图(z=0.8)Fig.16 Pressure Distribution at the x-y Section(z=0.8m)
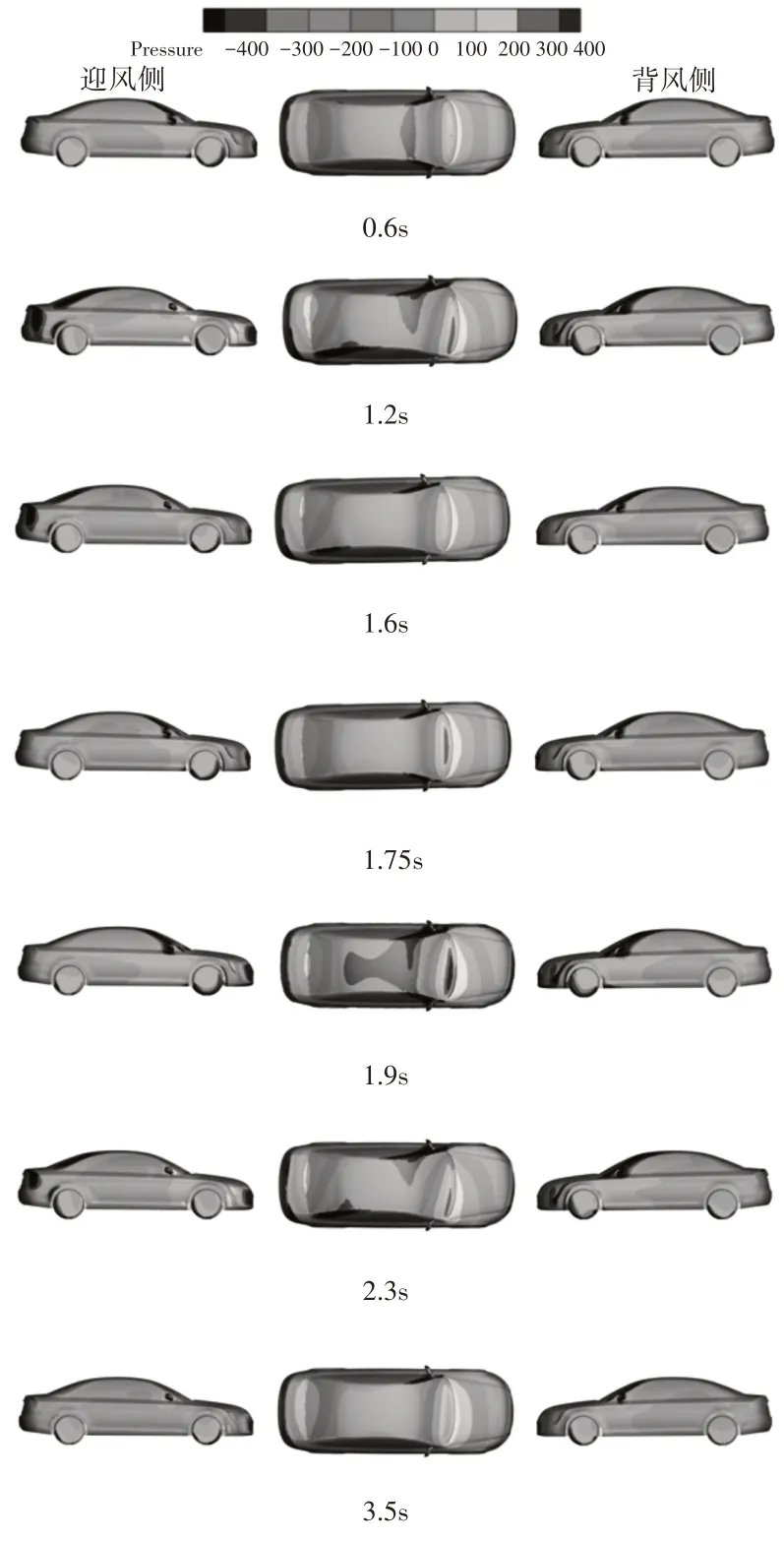
图17 动态耦合法各个时刻车辆表面压力云图Fig.17 The Surface Pressure Distribution on the Sedan
受侧风作用,车辆在流场的姿态是不断变化的。从图16、图17中可以看出,在t=0.6s,侧风速度为0m/s时,流场压力云图几乎是对称的,而车身表面迎风侧和背风侧的压力分布几乎相同。此时车辆的侧向位移为0m。在t=1.2s和t=1.6s时,侧风速度为10m/s时,汽车在侧风作用下,受到相对稳定的侧向力和横摆力矩作用,具有较大的侧向速度和横摆角速度,车辆表面压力分布不对称,并且气流在迎风侧C柱和背风侧的A柱上发生分离。迎风侧和背风侧的压力差导致侧向力和横摆力矩增加。车辆开始沿侧风方向滑行,横摆角与侧向位移逐渐增大。在t=1.6s时,当车辆接近桥塔时,车辆迎风侧的正压区减小。车辆背风侧A柱附近的气流分离区也减小。侧向力和横摆力矩逐渐减小。在t=1.75s时,侧风被桥塔遮挡,车辆表面压力分布几乎是对称的,此时反向横摆力矩使横摆角减小。
在t=1.9s时,车辆开始离开桥塔尾流区,车辆背风侧的A柱和C柱处发生气流分离。车辆迎风侧压力增加,侧向力和横摆力矩再次增加。在t=2.3s时,当车辆完全驶离桥塔并再次驶入侧风区域时,车辆表面压力分布与进入桥塔区类似。不同之处在于,由于车辆的横摆角变大,车身姿态发生变化,迎风侧C柱的气流分离面积减小。在t=3.5s时侧风消失,车辆的表明压力分布由不对称逐渐趋于对称。整个过程,车身姿态的变化影响了流场及气动力。
6 结论
采用动静态耦合法对侧风环境下车辆通过桥塔区域时的侧风稳定性进行分析,得出结论如下:
(1)侧风环境中,桥塔周围会产生绕流和脱落涡。车辆通过该区域时,侧向力和横摆力矩的数值先减少后增加,车辆受桥塔遮蔽时出现反方向侧向力。横摆力矩减小至36N·m,恶劣的侧风环境使车辆的行驶稳定性变差。
(2)侧风环境下车辆通过桥塔区域,动态耦合法考虑了车辆受侧风作用而产生的运动状态的变化,获得动力学响应更符合实际情况,计算得到的动力学响应如侧向位移为1.75m,横摆角为2.12°,相比于静态耦合法分别增加了12.91%、17.12%。
(3)车辆受侧风影响,横摆角持续增加,车身姿态的变化影响外部流场,进一步影响气动力。因此,研究车辆侧风稳定性应考虑气动力和车辆动态响应之间的相互作用。
猜你喜欢
建筑机械化(2022年7期)2022-07-29 13:25:34
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
铁路技术创新(2020年6期)2020-02-25 02:28:26
工程与建设(2019年5期)2020-01-19 06:22:40
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
山西交通科技(2016年4期)2016-11-15 06:50:18
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
