
基于无人机仿地倾斜摄影的南水北调深挖方与高填方渠段三维重建
2022-06-28 00:21刘文锴龚天浩胡青峰贡恩军王果李世明寇迎超
华北水利水电大学学报(自然科学版) 2022年3期
刘文锴, 龚天浩, 胡青峰, 贡恩军, 王果, 李世明, 寇迎超
(1.华北水利水电大学,河南 郑州 450046; 2.河南工程学院,河南 郑州 451191)
南水北调中线工程是我国一项宏伟的生态工程和民生工程,该工程的安全运营极大地缓解了中国中、北部地区的水资源短缺问题,有效改善了河南、河北、北京、天津4个省(直辖市)受水区域的生态环境和投资环境,推动了中国中、北部地区的经济社会发展。南水北调中线工程输水渠段全长1 432 km,渠道沿线工程地质条件复杂多变,有采空区、膨胀土、湿陷性黄土、深挖方、高填方等。尤其在深挖方与高填方渠段,在膨胀土与大高差边坡多种不利因素耦合影响下,渠段边坡极不稳定,存在许多明显的裂缝,这给南水北调中线工程的安全运营带来了极大隐患,一旦在深挖方或高填方渠段发生滑坡灾害,其后果不堪设想。为探明渠道边坡的裂缝分布情况,常采用以下几种方法进行渠道边坡检测:①通过全站仪、GNSS接收机在渠道边坡上设立多个检测点,对边坡进行单点条带式检测。该方法精度高且便于观测数据,但无法描述渠道边坡的整体情况及全面信息[1]。②利用合成孔径雷达差分干涉测量技术(Differential Interferometric Synthetic Aperture Radar,D-InSAR)获取渠道边坡表面形变数据。该方法不受时间与空间的制约,对地物有一定穿透能力,监测范围广、密度大,且具有相对高精度的处理结果,但其结果因空间基线改变与受大气噪声影响,会造成数据失相干,且时效性不足[2]。③利用三维激光扫描仪获取渠道边坡的地表信息。该方法数据量大且精度较高,可以有效提取信息用于边坡灾害检测,但三维激光扫描仪设备价格高昂,且数据处理无法实现自动化[3-5]。
无人机倾斜摄影测量技术是近年来一种新兴的三维数据获取方法,将无人机技术与倾斜摄影技术相结合,利用无人机云台搭载的不同镜头分别从多个倾斜角度获取地物三维信息。随着现代测绘新技术的发展,利用倾斜摄影测量的方法对渠段边坡进行高精度三维模型重建逐渐成为一种有效的手段。然而,由于深挖方和高填方工程地质条件特殊,典型特征是坡底和坡顶落差较大[6],采用传统固定航高无人机飞行倾斜摄影测量技术所获影像的地面分辨率不一致,易导致空中三角加密计算失败,所建三维模型无法对渠道裂缝进行有效显示和表达,进而无法进行渠道边坡病害检测。
为解决此类传统技术难以解决的问题,本文引入无人机仿地飞行倾斜摄影测量技术,以南水北调中线渠首高填方渠段为研究区域,利用无人机仿地飞行获取地面分辨率一致的高分辨率渠道时序影像,以提高空中三角测量的成功率,并对该渠段进行高精度三维模型重建,以期为南水北调中线工程的边坡病害检测与保障通水安全提供重要的数据支撑。
1 无人机仿地倾斜摄影技术
1.1 无人机倾斜摄影测量技术
随着航空摄影技术的不断发展,无人机倾斜摄影测量技术在近年来得到飞速进步,突破了传统摄影测量只能拍摄正射影像的局限性,通过前视、后视、正射、右视及左视5个镜头同步采集多视图时序影像,结合载波相位差分技术(Real-Time Kinematic,RTK)获取地物三维信息及高精度纹理信息[7-8]。
其中倾斜影像区域网平差是倾斜摄影测量中最关键的环节之一,利用单幅影像覆盖的已知控制点坐标与像点坐标,根据共线条件方程,在全范围内进行统一平差解算,求得每个影像独立的外方位元素,按照多相片前方交汇解出加密点的地面坐标。其经典多相机共线方程为:
(1)
(2)
式中:x、y为像片像点在像平面上的位置坐标;x0、y0、f为摄影中心与像片之间相关位置参数;XA、YA、ZA为地面点在物方空间坐标系中的位置坐标;XS、YS、ZS为摄站点在物方空间坐标系中对应的坐标;ai、bi、ci(i=1、2、3)为影像旋转矩阵R的9个方向余弦,则
(3)
(4)
式中x0、y0为由共线方程代入外方位元素近似值得到的x、y值。
相比传统的边坡检测方法,无人机倾斜摄影测量技术具有工作范围广、数据获取快、后期数据处理可操作性强、数据精度高以及成本低等优点,在城市三维场景重建[9]、水利工程检测与管理[10]、消防应急救援[11]、露天矿区测绘[12]等领域有重要用途。
本文首先利用常规无人机倾斜摄影测量手段,对南水北调中线工程渠首高填方与深挖方渠段进行三维重建,采用飞行高度为80 m的定航高飞行。常规倾斜摄影测量三维模型效果如图1所示。

图1 常规倾斜摄影测量技术获取的渠道三维模型
由于渠道边坡高差大引起的地面分辨率不同,导致三维模型拉花严重,且纹理细节粗糙,无法描述边坡病害,不能为南水北调中线工程的病害检测提供有效帮助。此外,经典无人机倾斜摄影测量在航线规划时,采用固定航高获取的影像不能很好地刻画立面细节,导致三维重建过程中空中三角计算失败、无法通过等问题,无法满足南水北调中线工程的实际边坡巡检需求[13]。
1.2 无人机仿地飞行技术
针对南水北调高填方和深挖方渠段落差较大的特点,综合考虑选用基于仿地飞行的倾斜摄影测量技术获取边坡影像数据。仿地飞行是指无人机进行外业操作时,无人机随已知地形高度起伏变化与目标地物始终保持固定高差,其原理如图2和图3所示。利用无人机仿地飞行,不仅能保证无人机飞行安全,而且可以获得地面分辨率一致的高质量数据,已在电力巡检[14]、植保[15]、铁路勘察[16]等领域得到应用。
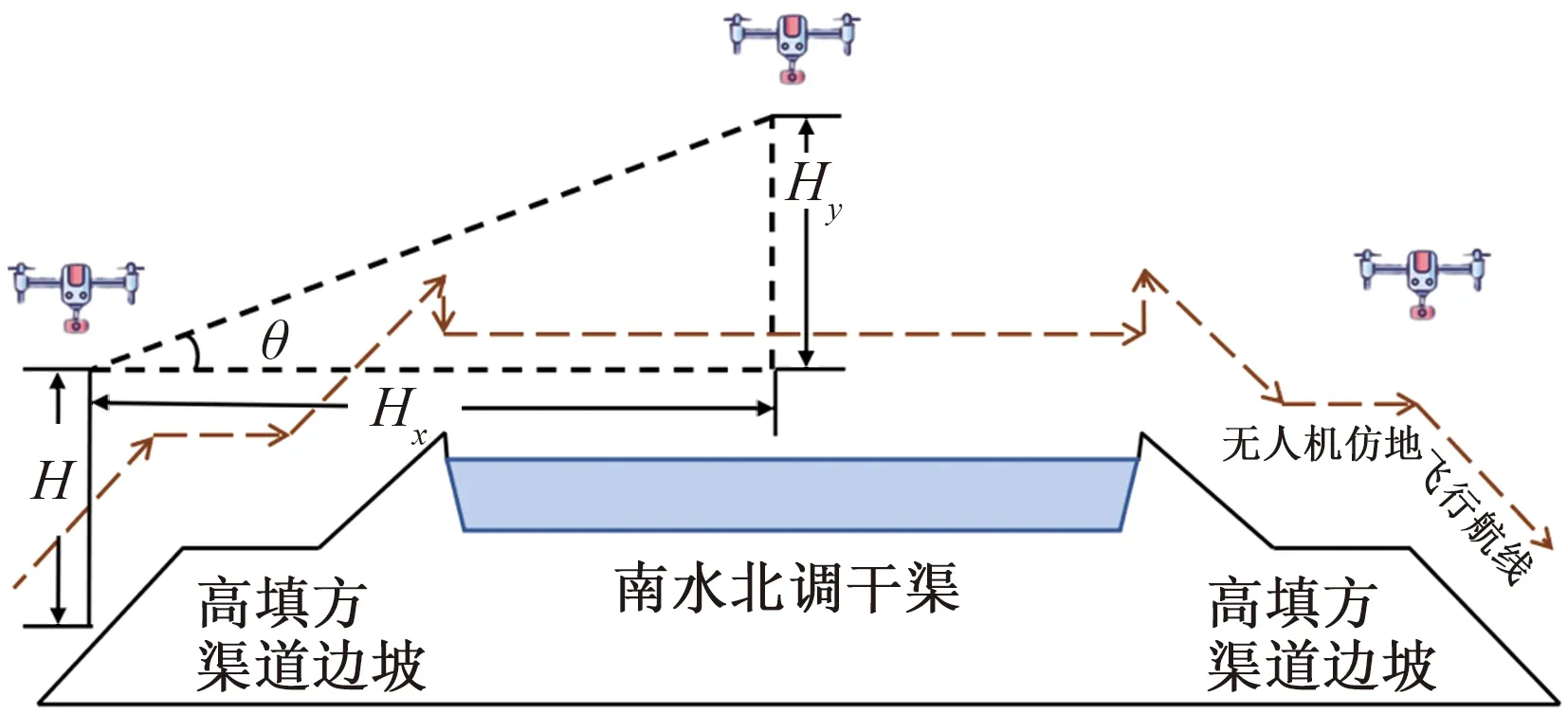
图2 仿地飞行原理示意图(高填方渠段)
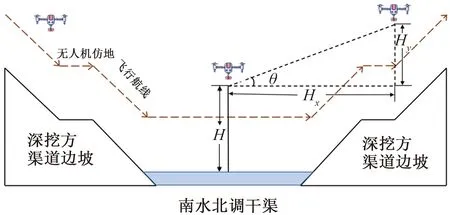
图3 仿地飞行原理示意图(深挖方渠段)
无人机需获取测区高程信息方可仿地飞行,当前可利用无人机搭载的雷达传感器计算无人机离地高度,也可预先加载数字地表模型(Digital Surface Model,DSM)文件获取高程信息,通过飞控模块俯仰角(θ)的变化来确定无人机姿态的变化,确保无人机与地面垂直距离始终一致[17]。地面高程变化大时:当θ>0°,无人机上升;当θ<0°,无人机下降。θ的范围可按下式计算:
(5)
式中:Hx为无人机横向位移长度;Hy为无人机纵向位移长度;Vx为无人机作业水平速度;Vy为无人机作业垂直速度;t为作业时间。
为了避免南水北调中线渠首段地形高差大造成的空三加密计算失败问题,及获取高精度渠段三维模型,本文选用仿地飞行进行渠段边坡数据获取,并设计无人机仿地飞行技术路线,如图4所示。
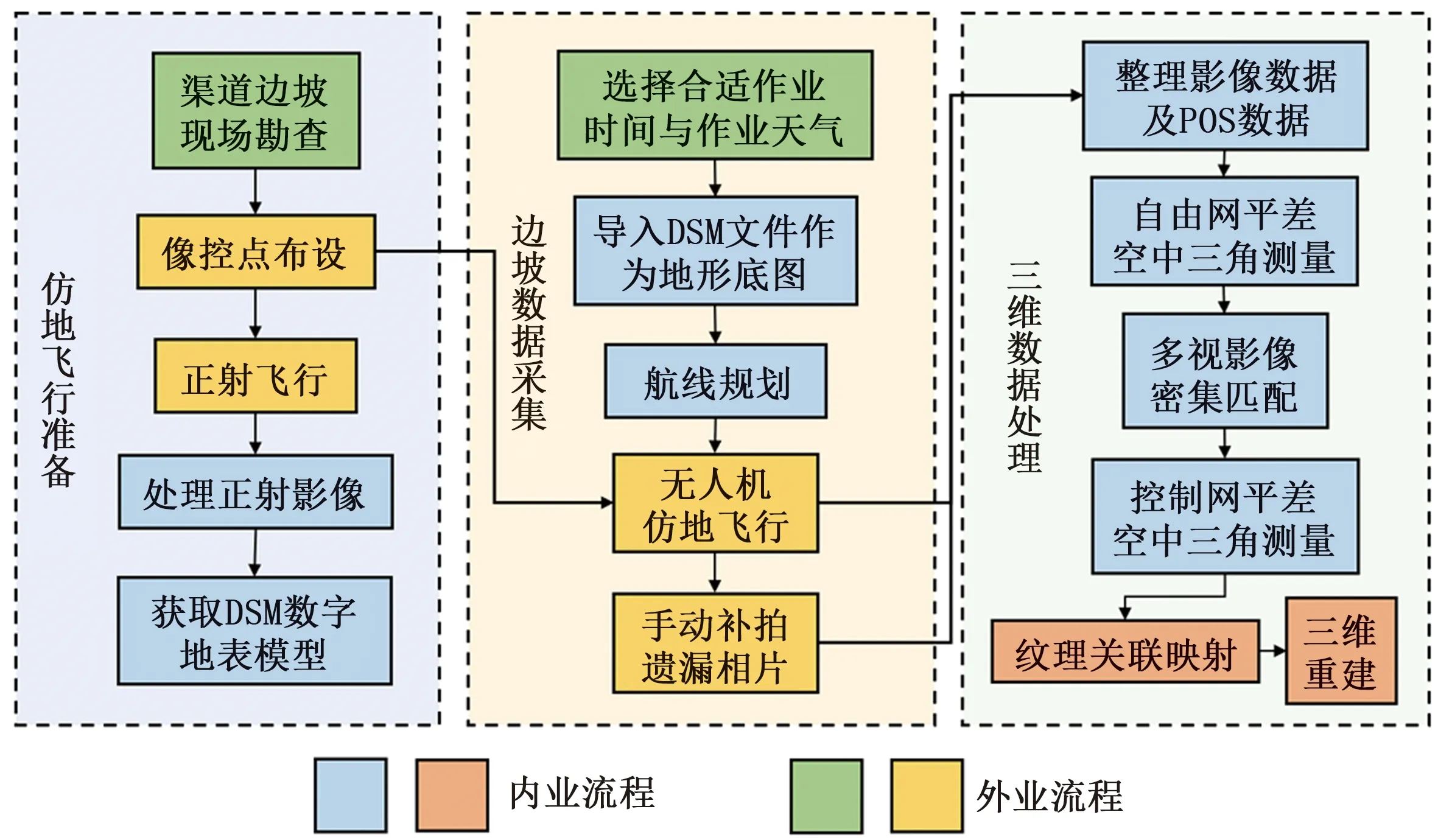
图4 仿地飞行技术路线
2 试验区概况与试验数据采集
2.1 试验区概况
本文选取南水北调中线渠首高填方渠段为试验区,如图5所示(中华人民共和国地势图来源于中华人民共和国自然资源部国家基础地理信息中心)。该区域位于河南省南阳市邓州市九龙镇姚营村刁河渡槽,是整个南水北调中线工程为数不多的大高差高填方渠段之一。该区域地质结构复杂,渠道边坡多为吸水膨胀失水收缩的膨胀土,性质极不稳定,易引起边坡失稳等工程灾害。试验区自西南向东北长约350 m、宽180 m,试验区面积63 000 m2,其中水面面积12 800 m2,约占整个试验区的1/5。高填方宽度58 m,两侧有水平距离61 m、相对高差16 m的边坡。边坡最高地物17.6 m,地势呈阶梯型下降。
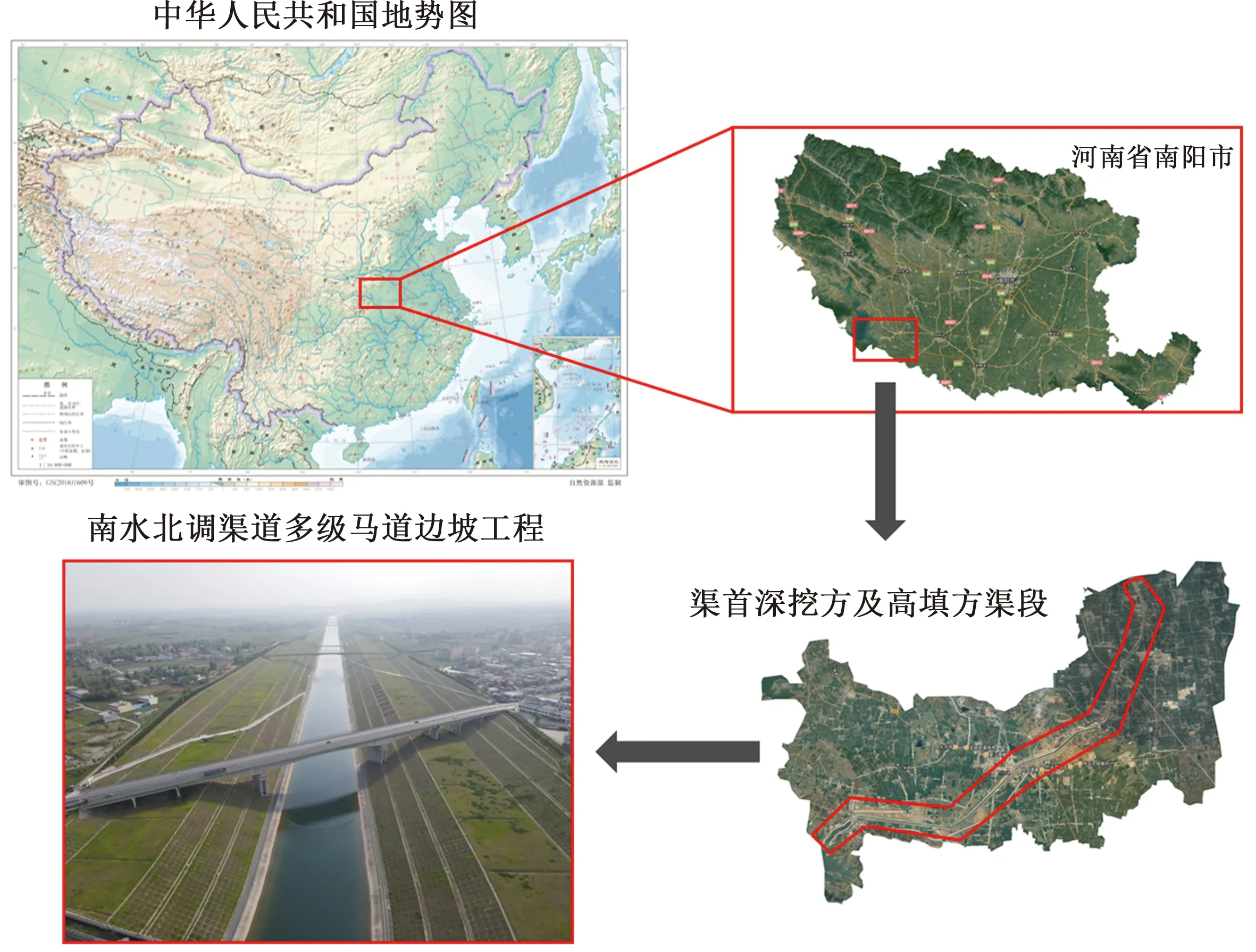
图5 试验区卫星影像
2.2 试验数据获取
2.2.1 像控点布设与测量
测区像控点需具有一定的几何稳定性,根据航线统一规划像控点,使其均匀分布在整个试验区是像控点布设的关键。像控点的位置应尽量选择上方及四周无遮挡、地面平整的区域,保证像控标志便于固定且清晰可见。由于试验区南水北调渠道为条带状测区,本文综合考虑后,采用“S”形路线在边坡两侧二级马道布设像控点6个,相邻两点间隔约94 m。像控标志色彩应与周围地物色彩对比鲜明,设计成易识别且可重复利用的红白黑相间的样式,长宽均为0.8 m,中间预留测钉孔,以提高标志中心准确度且避免其移动[18]。图6中下为像控点分布,右上为像控点样式。为保证测量重建精度,在布设完像控标志后,使用中海达iRTK5 X进行图根测量获取像控标志中心点坐标,每点进行5个测回,每测回平滑采集10次。图6左上为试验人员做测量前准备。
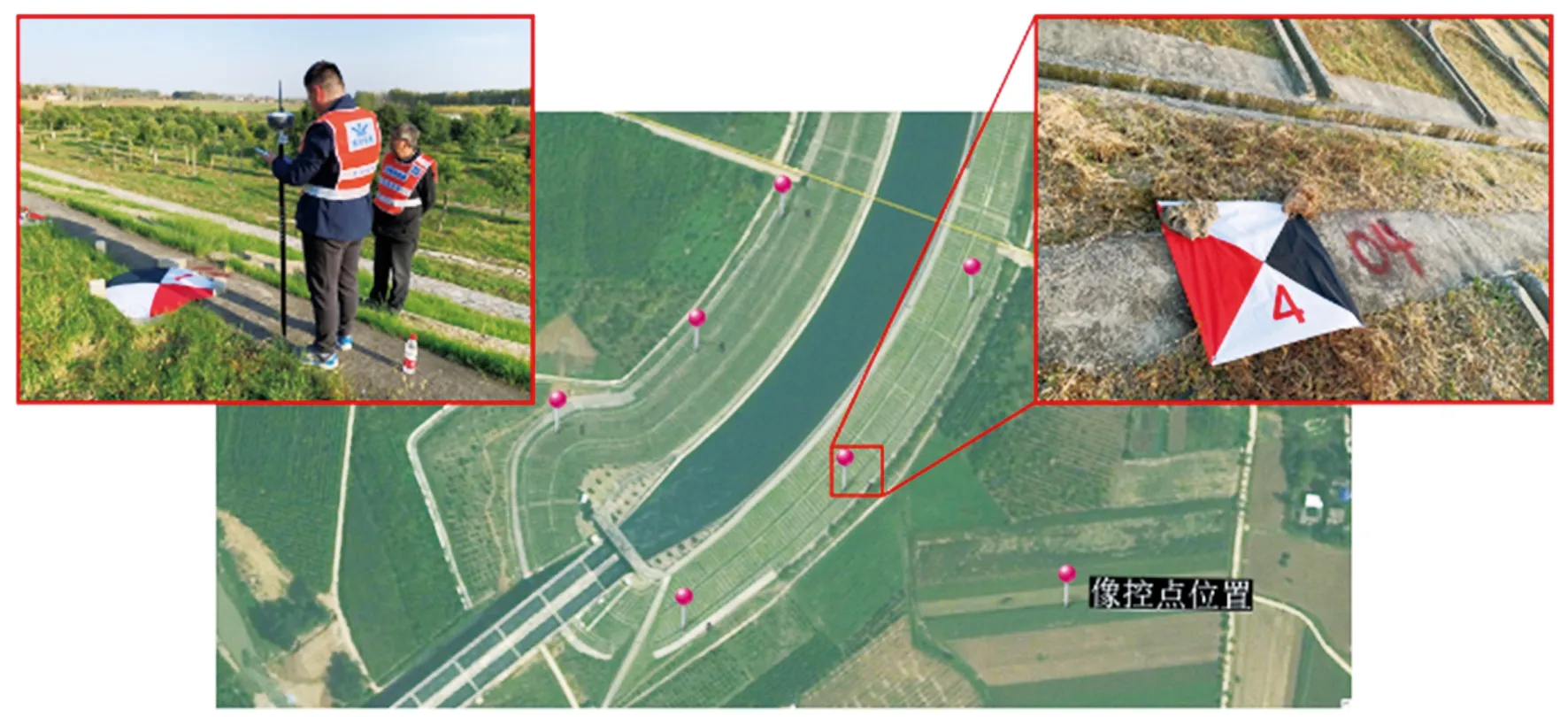
图6 像控标志样式及分布
2.2.2 试验区DSM生成
由于仿地飞行的航高随地形起伏不断变化,需要试验区的DSM文件作为底图。获取DSM文件可通过网络下载或者实地采集。为保证试验精度,本文利用DJI Phantom 4 RTK无人机现场采集地形数据。设计航高为80 m,航向和旁向重叠度均为75%,云台相机倾角-90°,即镜头始终朝下获取正射影像。经数据处理得到试验区DSM,如图7所示[19]。
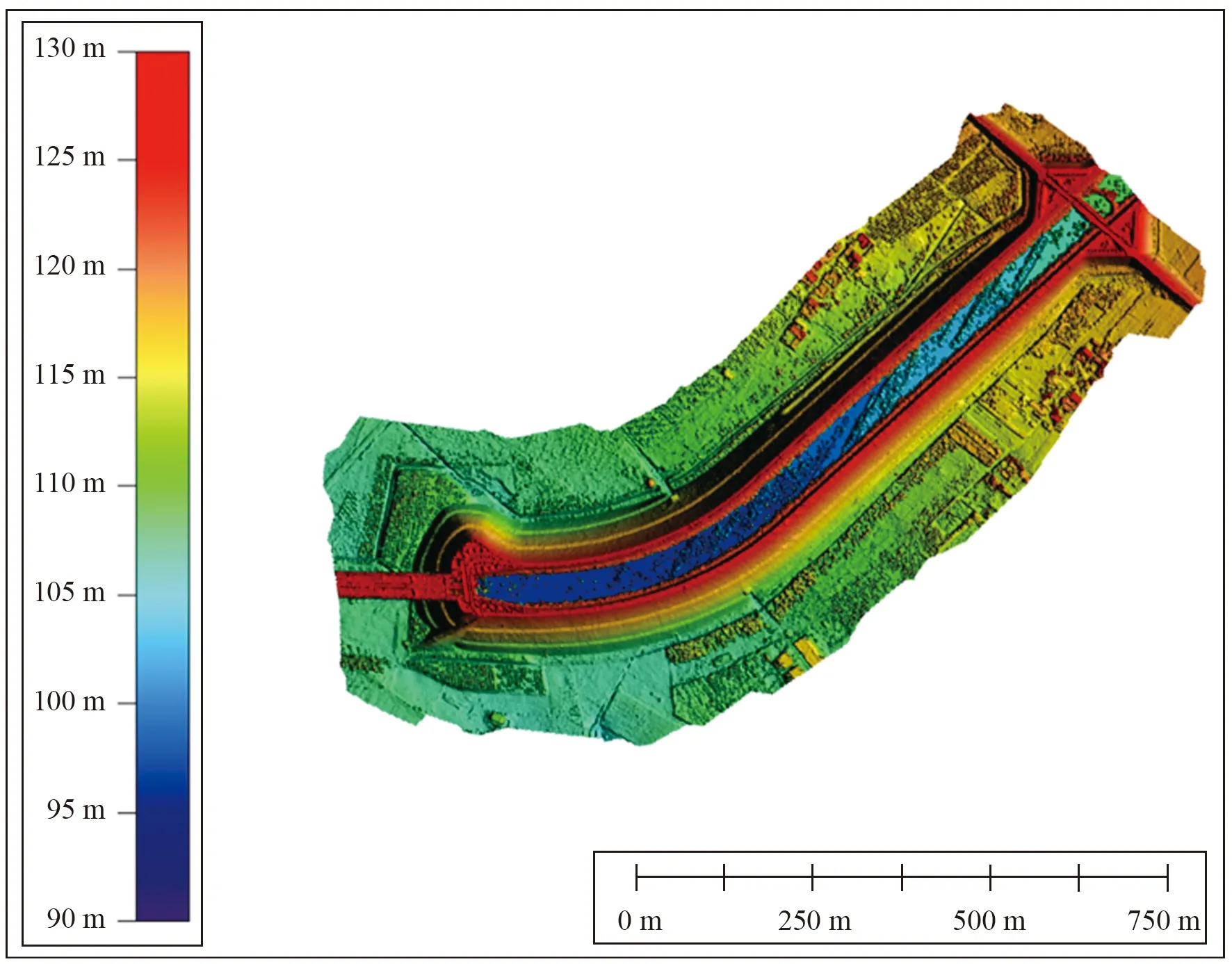
图7 高填方数字地表模型
2.2.3 试验数据采集
1)航高与航线设计。经过实地测量,试验区内相对地面最高的建筑物高度为18 m,且渠道边坡两侧有无人机避障系统不易识别的高压线,需预留一定飞行安全缓冲高度,加上地面分辨率(Ground Sample Distance,GSD)跟航高有密切的联系,因此选取仿地飞行高度为30 m[20]。三维模型的质量很大程度上取决于无人机正射及倾斜影像的地面分辨率。地面分辨率是衡量影像可以区分两个相邻地物最小距离的能力,它与航高的关系如下:
GSD=δH/f。
(6)
式中:GSD为地面分辨率;δ为倾斜相机像元尺寸大小;H为相对航高;f为摄影镜头焦距。
为达到三维建模空中三角测量的精度,应尽量控制影像数据中不同像片的分辨率一致。在保证像片重叠度的前提下,设计航线应考虑正射影像分辨率与侧视影像分辨率相结合,并剔除近点与远点分辨率差异过大的区域。根据正射影像地面分辨率公式与倾斜摄影传感器主光轴旋转角度,可得到影像的近点、中点及远点的地面分辨率,分别为GSDtop、GSDmid、GSDbottom,计算公式如下:
(7)
(8)
(9)
式中:δ为倾斜相机像元尺寸大小;H为相对航高;αy为倾角;f为摄影镜头焦距;βy为视场角的一半[21]。倾斜摄影像片的几何关系如图8所示。
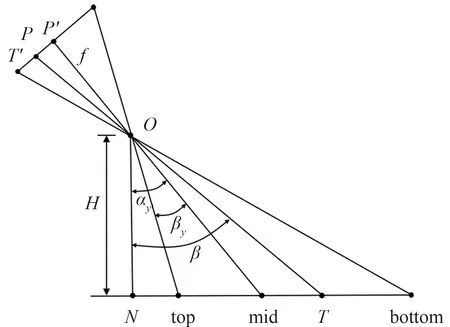
图8 倾斜影像的几何关系
最终得到本次无人机仿地飞行任务的地面分辨率为0.47 cm/pixel。根据试验区范围与任务航高,划定航线范围[22]。仿地飞行航线参数见表1,仿地飞行总体航线规划如图9所示。
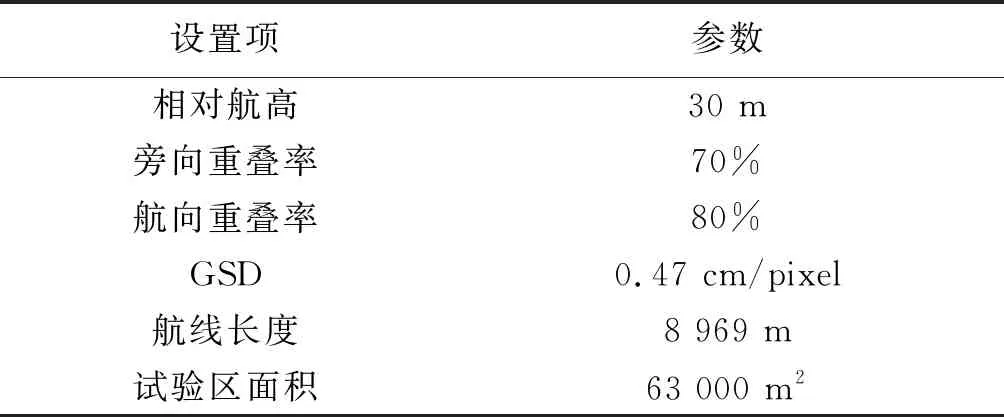
表1 航线参数
2)无人机仿地飞行试验设计。仿地飞行选用的飞行平台为DJI M300 RTK,云台镜头为RAINPOO DG2 PSDK,其五镜头相机总像素为1.2亿,正射焦距为25 mm,倾斜焦距为35 mm,传感器尺寸为23.5 mm×15.6 mm;相机采用等时曝光,最小曝光间隔0.8 s。试验区仿地飞行倾斜摄影影像采集时间为2021年3月25日上午10:00—12:00,天气晴朗,风力2~3级。设计飞行架次为3架次,采集影像10 880张,整个飞行过程历时约2.2 h。

图9 仿地飞行总体航线规划
3 数据处理与精度分析
3.1 数据处理
3.1.1 数据处理软件及硬件
ContextCapture是一套集合数字影像、计算机虚拟现实及计算机几何图形算法的全自动高清三维建模软件解决方案,它能接收各种硬件采集的多种原始影像数据,良好的数据兼容性以及强大的数据运算能力使其成为三维数据建模领域比较优秀的软件[23]。
建模对电脑硬件要求较高,为避免出现空中三角测量失败等情况,本次内业均使用Precision 3630系列工作站,处理器为intel CORE i7-9700k。
3.1.2 数据预处理
由于低空仿地飞行数据量较大,不同视角镜头的影像数据是分开存储的,因此需要检查每个镜头的影像数量及质量,在每个镜头及其对应的高精度测量系统的位置及姿态数据(Position and Orientation System,POS)中剔除不合格影像,避免其影响建模效果。检查时应注意照片数量与POS数据数量须一一对应。
3.1.3 集群设置
为了提高数据的处理效率,需建立ContextCapture工作集群,并进行多机联合空中三角计算与建模生产,集群电脑需接入同一局域网。工作集群的建立分为3步:①共享磁盘,映射网络驱动器;②查看主机已提交生产的工程路径; ③在其他从机中通过ContextCapture Settings 添加与主机相同的路径,运行即可。
3.1.4 空中三角测量解算
解析空中三角测量又称为摄影测量加密或者空三加密,是指在航空摄影测量中,根据像点坐标与地面控制点的大地坐标,求得未知点的坐标,保证至少4个已知点放在每个模型中,然后利用解析法解算出测区所有像片的外方位元素。根据公式(10)—(12)进行光束法联合空中三角测量,解算耗时4.4 h,输出结果如图10所示,获得了高精度外方位元素(XS、YS、ZS、φ、ω、κ),以及纠正后的影像,为后续纹理获取与三维重建奠定了基础。
P1:V=CΔ+KGΔG+KTΔT-L,
(10)
Pd:Vd=IΔ-Ld,
(11)
PG:VG=IΔG-LG。
(12)
式中:P1为光束法平差的误差方程;Pd为外方位元素的虚拟观测方程;PG为控制条件方程所对应的权阵;C为系数矩阵;Δ为影像外方位元素(XS、YS、ZS、φ、ω、κ)的改正量;ΔG为控制点的坐标;ΔT为连接点的坐标改正数;KG为控制点坐标队列的系数矩阵;KT为连接点坐标对应的系数矩阵;L是像点坐标观测值的残差向量;Ld和LG均为虚拟观测向量;I为单位矩阵。
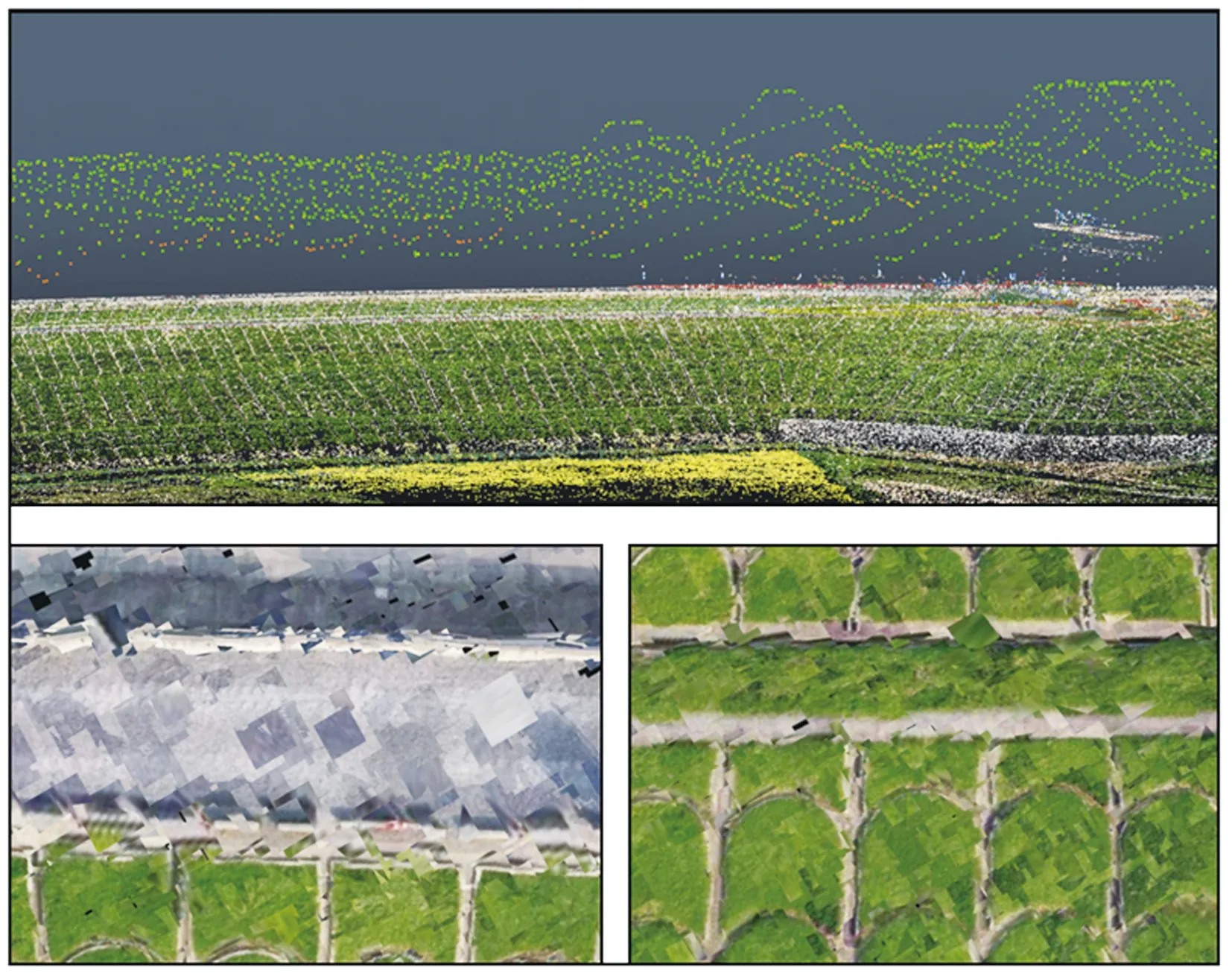
图10 空中三角测量成果
3.1.5 模型构建
模型构建是依次按照密集点云生成、Tin模型构建和纹理自动映射3个步骤来完成的。试验区建模过程中匹配成功的影像共9 454张,用时约15 h,整体效果如图11所示,放大后局部纹理如图12与图13所示。

图11 试验区渠段三维建模效果

图12 三维建模渠道裂缝细节

图13 三维建模边坡植被纹理与裂缝细节
3.2 精度分析
3.2.1 纹理精度分析
三维实景建模的纹理精度是衡量产出模型质量好坏的重要标准之一。通过对比真实影像照片纹理(图14)与三维模型表面纹理细节(图15)的差异可知,本次试验三维建模清晰精细,可以精确反映地物的真实纹理信息,完全满足南水北调中线工程大高差渠段的三维重建要求。

图14 试验区真实影像

图15 三维模型截图
3.2.2 位置精度分析
基于三维建模对大型水利工程的研究和保护工作,注重模型的纹理质量、几何精度和位置精度等。本文采用网络RTK在试验区内均匀随机获取10个检验点的坐标作为真值,三维模型上对应点的量测值作为估计值,将两者进行对比,并通过公式(13)进行三维模型的误差计算,求得距离均方根误差与高度均方根误差。
(13)
式中:RMSE为均方根误差;Δi为检验地物点坐标的测量值与模型上对应坐标的差值;n为检验地物个数。经过计算,得出所建模型的距离均方根误差为0.03 m,高度均方根误差为0.04 m,模型精度满足三维建模精细模型精度标准及水利检修需求[24]。10个检验点的距离残差绝对值与高度残差绝对值如图16所示。
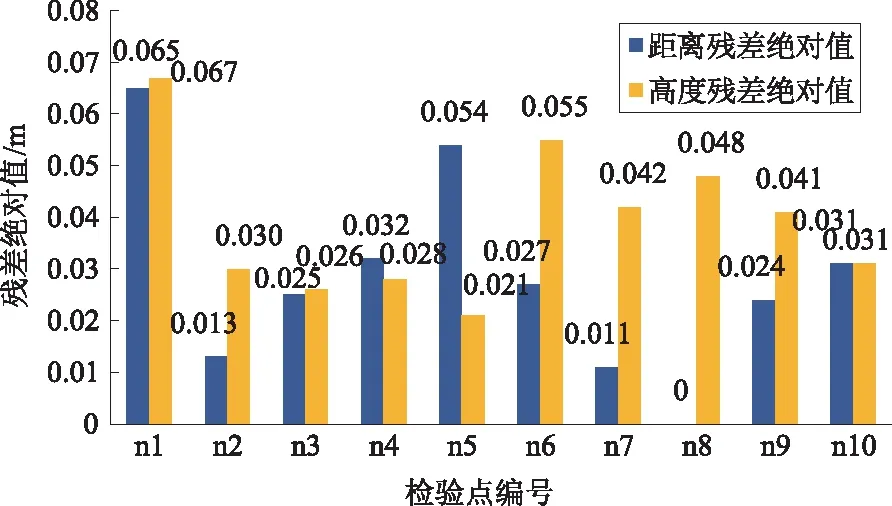
图16 检验点残差
4 结论
为探明渠道边坡的裂缝分布情况,针对南水北调中线工程渠首段边坡高差大的特点,引入仿地飞行倾斜摄影测量技术进行航空测量,设计了适合高填方与深挖方渠段的仿地飞行作业流程及试验方案。结果表明,在保证飞行安全的前提下,将仿地飞行应用到大高差水利边坡工程中,航高设定为30 m,构建的毫米级模型地面分辨率可达0.47 cm/pixel,距离均方根误差达0.03 m,高度均方根误差达0.04 m,满足相关规范及水利检修需求;所建三维模型极其接近真实情况,具有完整性好、纹理特征明显、几何精度高等特点,可为有关水利部门开展相关工程建筑的病害排查工作和及时采取措施提供数据支撑。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
华声文萃(2022年5期)2022-06-01
建材发展导向(2022年4期)2022-03-16
建材发展导向(2021年22期)2022-01-18
科学与财富(2021年36期)2021-05-10
东坡赤壁诗词(2020年4期)2020-09-02
科学与技术(2019年20期)2019-05-07
百年潮(2017年5期)2017-05-25
民生周刊(2014年21期)2014-10-15
