基于系统动力学的科技监督能力建设研究
2022-06-27 09:23廖苏亮
决策咨询 2022年3期
◆廖苏亮
一、引言
科技监督是有效配置创新资源、构建现代科技创新治理体系的重要组成,也是防范和化解科研领域重大风险的有效手段[1]。随着高质量经济社会发展对科技创新需求的日益提高,我国各级政府投入大量人力、物力、财力等资源组织开展科技攻关。在此情形下若缺乏有效的监督机制约束,科研活动将可能发生资金挪用、成果虚报、夸大、造假等科研不端问题[2],甚至可能发生“基因编辑婴儿”[3]等重大事件,不仅严重影响科技计划实施效果,破坏科研风气,也影响政府形象和公信力[4]。长久以往,各类科学研究活动将面临来自不同视角和立场的质疑和非议,必将对我国科技事业造成深远的负面影响。此外,缺乏监督的约束还给权力寻租和利益输送提供了空间。随着国家科技管理体制改革的不断深入,我国科技监督体系逐渐完善,但目前监督工作的基础仍较薄弱,监督能力还有待提高,特别是在完善体制机制、培养监督队伍、创新监督手段、提升监督效能等方面有待进一步加强。在此情况下,有必要针对“如何提高我国科技监督能力”这一关键问题开展研究,厘清影响科技监督能力建设的关键因素和动力机制,为政府优化监督资源配置和决策提供参考。
二、文献综述
近年来,国内已有学者针对我国科技监督体制机制和运行机理开展了相关研究。部分学者分析了我国科技计划监督体系的不足之处,并提出相应建议。孙卫华[5]认为我国科技监督体系的建设存在监督能力建设不足,手段单一、调控力不强等问题;黄锦成等[6]基于我国科技计划项目的监督现状和特点,提出发挥科技中介组织和专业服务机构的作用来提高监督效能;张缨[7]总结分析了国家科研项目资金监督模式,建议在我国政府治理的整体框架下建立高效统一的科研项目资金监督体系。此外,部分学者尝试构建理论模型或数理方程研究科技监督系统运行的内在机制,并提出提高科技项目监督管理效率的对策。盖宏伟等[8]认为我国科技监督存在监督主体较单一、结构性偏弱等问题,基于系统论和协同理论提出以科技资金监多元主体联盟协同监督的运行模式来提升监督效果;张同建等[9]以我国科研工作者的相关数据为样本,通过建立结构方程模型分析科研活动中发生投机行为的微观机理,并提出相应的监督治理对策;伍慧春[10]总结了我国科技管理在实施监理制度过程中存在的问题,提出结合其他发达国家的工程监理理念建立我国科技项目的新型监管模式。
上述文献从政策分析、案例剖析和数理模型分析等多个角度提出完善我国科技监督体系建设的决策建议和方法,但缺乏针对科技监督能力提高策略的系统性研究。特别是在稳定投入的条件下,如何优化分配要素投入以获得最优科技监督能力建设效果仍不明晰,导致在进行实际决策时更多依靠借鉴历史经验,存在一定的盲目性和滞后性。此外,现有的数理模型无法反映系统平衡和动态选择间的关联关系,而系统动力学(SystemDynamics)可以较好地反应系统的因果响应和动态变化[11],通过合理的建模、赋值以及计算机仿真可以很好地预测系统的发展走向,是研究部分信息缺失时系统复杂演化过程的一种有效方法[12]。
本文基于系统动力学理论构建科技监督能力动力学模型,构建科技监督能力建设系统的因果反馈图和系统流量图,分析系统的运行规律、动力机制、关键要素及要素间的反馈关系[13],直观地展示各系统关键要素间的相互作用关系及对系统的影响。同时,通过改变投入要素参数,分析不同投入策略对监督能力的影响机制,模拟不同策略变化情况及对科技监督能力的影响,探索能取得最优效果的策略方案,最后通过Vensim PLE 计算机仿真软件分析了科技监督中的关键因素的交互影响并预判系统的未来发展。
三、动力学模型构建
(一)系统分析
科技监督系统是一个复杂的多要素系统,各要素按一定规律相互影响形成独特的动态运行特性和功能,因此首先需厘清主要影响因素之间的复杂关系。在当前科技监督体系下,政府作为主要的监督主体,其监督能力受内外因素的影响,其中内因包括相关法律法规、组织管理水平、监督队伍建设等,外因包括信息渠道及科技手段等。本研究将影响科技监督能力建设的主要因素总结为法律法规,组织管理、人才队伍、信息化、科技手段5 个因素,以上5 个因素作为系统动力学模型的主要变量共同影响科技监督能力的建设效能。同时为保障本研究的科学性和有效性,对模型作如下设定:
(1)科技监督的主体为政府部门或代替履行监督职责的机构(如科技项目管理专业机构),不考虑媒体监督、社会监督等外部监督。
(2)科技监督的对象是政府财政资金支持下的科研活动,不含自发组织进行的科技创新行为。
(3)科技监督系统能在较长时间(至少36 个月)内保持稳定运行,短时间内不发生重大的政策调整,不考虑其他突发事件对系统造成的冲击以及系统崩溃。
(二)因果关系分析
通过梳理分析科技监督能力建设系统中各关键影响参数的因果关系,参考以往学者的研究成果[14],在系统动力学模拟仿真软件Vensim PLE 中建立系统因果关系图,如图1 所示。
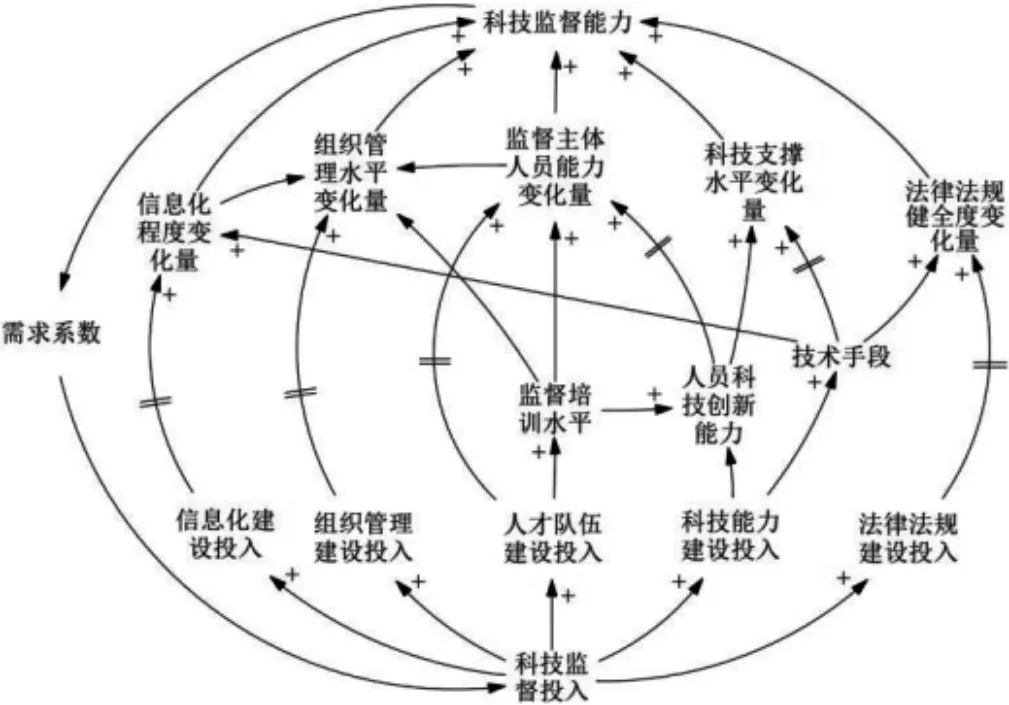
图1 科技监督能力建设系统因果关系
从图中可看出科监督能力建设系统包含7条主要的反馈回路,如下:
(1) 科技监督投入+→组织管理建设投入+→组织管理水平+→科技监督能力-→需求系数+→科技监督投入;
(2) 科技监督投入+→信息化建设投入+→信息化程度+→科技监督能力-→需求系数+→科技监督投入;
(3) 科技监督投入+→人才队伍建设投入+→人员能力+→科技监督能力-→需求系数+→科技监督投入;
(4)科技监督投入+→科技建设投入+→人员科技创新能力+→科技支撑水平+→科技监督能力-→需求系数+→科技监督投入;
(5)科技监督投入+→人才队伍建设投入+→监督培训水平+→人员能力+→科技监督能力-→需求系数+→科技监督投入;
(6)科技监督投入+→科技建设投入+→技术手段+→科技支撑水平+→科技监督能力-→需求系数+→科技监督投入;
(7)科技监督投入+→法律法规建设投入+→法律法规健全度+→科技监督能力-→需求系数+→科技监督投入。
(三)系统流图构建和主要方程
科技监督是一个复杂且具有动态性变化的系统,为清晰地反映科技监督能力提升过程中的动态机制和反馈机制,本研究在因果分析的基础上依据系统要素的实际作用情况,遵循系统动力学理论的基本原理创建科技监督能力提升的系统流图,如图2 所示。
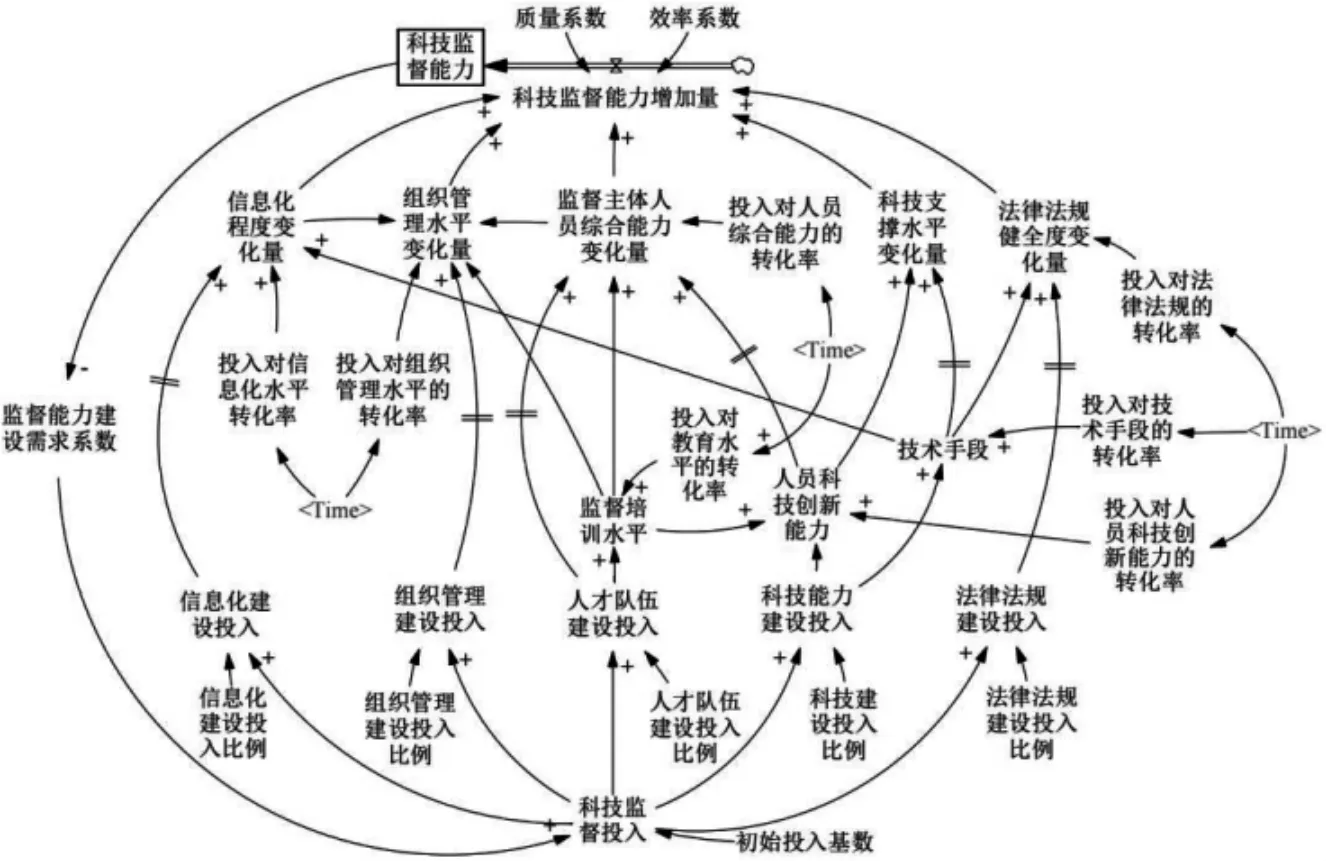
图2 科技监督能力建设系统结构流
以上系统流图主要基于因果关系得出,设计了相关方程,并设定相关参数来确定各系统变量间的相互关系,其中部分方程参考以往学者的研究成果[14]设定,部分运用标准单位比较赋值法、文献研究法、专家咨询法等建立,部分常量参数基于Delphi专家咨询和历史经验数据估算得出。须特别说明的是,由于投入对技术手段的转化率、投入对法律法规的转化率等投入转化系数通常呈现出非线性的表现特征,难以用特定的表达式来描述不同变量的变化形式。因此本研究在进行数值计算时运用系统动力学的表函数(即WITH LOOKUP 算法),通过设置表函数来模拟相关变量间的相互影响及发展趋势,表函数的特殊点值经咨询专家后确定。以“投入对人员科技创新能力的转化率”为例,在科技创新资源持续投入时,人员往往需要一段时间来学习新知识和掌握新技术,因此前期转化率较低。经过一段时间的积累,受训人员的科技创新能力将在之后的一段时间呈现快速提升的趋势,科技转化率快速升高。随着时间推移,人员已逐渐掌握新技术和新技能,由于科技发展条件限制或知识逐渐达到饱和,科技转化率会迅速降低,此时即便继续加大投入,人员科技创新能力也将维持在较低水平的增长。
本研究中涉及的主要变量和参数设置如下所示:
科技监督能力。构建本系统动力学模型的主要目的是研究影响科技监督能力提升的主要因素,找到提升监督能力的路径和方法。因此将状态变量科技监督能力设置为系统的最终输出量,其表达式为:科技监督能力=INTEG(科技监督能力增量,80),其中INTEG 为积分算法,是状态变量的各个时刻取值的积累,本研究中科技监督能力的初始值设定为80。
科技监督能力增量。科技监督能力增量是本研究中的主要流率变量,同时受律法规,组织管理、人才队伍、信息化、科技手段等因素的影响,其数学表达式为:科技监督能力增量=(人员能力变化量×0.25+法律法规健全度变化量×0.23+组织管理水平变化量×0.18+科技水平变化量×0.19+信息化程度变化量×0.15)×质量系数×效率系数。
需求系数。需求系数与科技监督能力的负值呈指数函数关系,表达式为:需求系数=EXP(- 科技监督能力)。
信息化程度变化量。信息化建设水平的提高通常经历信息系统建设、信息化人才培养等过程,需一定的时间才能看到效果,因此本研究中引入一阶延迟函数来表示政府监督能力的提升效果,表达式为:信息化程度变化量=DELAY1(投入对信息化程度的转化率×信息化建设投入×0.57+技术手段×0.43,8),DELAY 表示存在系统延迟,延迟时间为8 个月。
监督主体人员能力变化量。监督能力需要通过技术培训、经验积累、团队协同以及交流学习来提升,同样需一定的时间才能看到效果,因此本研究中引入一阶延迟函数来表示政府监督能力的提升效果。人员能力变化量=DELAY1 (投入对人员能力的转化率×人才队伍建设投入×0.59+监督培训水平×0.27+人员科技创新能力×0.14,8),延迟时间设置为8 个月。
科技支撑水平变化量。科技支撑水平变化量=DELAY1 (人员科技创新能力×0.58+技术手段×0.42,8),设置延迟时间为 8 个月。
组织管理水平变化量。组织管理水平变化量=DELAY1(投入对组织管理水平的转化率×组织水平建设投入×0.62+监督培训水平×0.16+信息化程度变化量×0.12+人员能力变化量×0.10,6),延迟时间设置为6 个月。
法律法规健全度变化量。法律法规健全度变化量=DELAY1(投入对法律法规的转化率×法律法规建设投入×0.71+技术手段×0.29,12),DELAY1 指一阶延迟,设置延迟时间为12 个月。
技术手段。技术手段指科技监督工作中采取的新模式、新技术或新方法,如情报分析系统、大数据预警技术、动态监测分析技术等。技术手段的数学表达式为:技术手段=投入对技术手段的转化率×科技建设投入。
人员科技创新能力。人员科技创新能力同时受科技建设投入和监督培训水平的影响,表达式为:人员科技创新能力=投入对人员科技创新能力的转化率×科技建设投入×0.81+监督培训水平×0.19。
监督培训水平。监督培训水平=投入对教育水平的转化率×人才队伍建设投入。
投入对信息化水平的转化率。本研究采中用WITH LOOKUP 算法表示投入与信息化程度的表函数,表函数的特殊点值通过文献分析和专家咨询后建立。投入对信息化程度的转化率=WITH LOOKUP(Time,([(0,0)-(50,0.035)],(0,0.01),(4,0.012),(8,0.015),(12,0.015),(16,0.018),(20,0.022),(24,0.021),(28,0.016),(32,0.01),(36,0.008),(40,0.006),(44,0.004),(50,0.003)))。
投入对人员科技创新能力的转化率。同样采用表函数特殊点值的分析方法,得到投入对人员科技创新能力的转化率 =WITH LOOKUP(Time,([(0,0)- (48,0.035)],(0,0.009),(4,0.013),(8,0.02),(12,0.024),(16,0.032),(20,0.03),(24,0.024),(28,0.022),(32,0.02),(36,0.018),(40,0.02),(44,0.018),(48,0.016)))。
投入对法律法规的转化率。同理采用表函数特殊点法得出投入对法律法规的转化率=WITH LOOKUP(Time,([(0,0)-(48,0.035)],(0,0.011),(4,0.015),(8,0.021),(12,0.024),(16,0.023),(20,0.022),(24,0.022),(28,0.02),(32,0.016),(36,0.018),(40,0.02),(44,0.018),(48,0.016)));
其他几个投入要素的转化率根据要素特点和运行特征来设置表函数,在此不再逐一陈述。
完成动力学系统的主要变量和参数设置后,利用仿真软件 Vensim PLE 中的“unit check”功能[15]检验科技监督能力系统动力学模型的量纲一致性。此外,采用极值检验法证明系统运行稳定性,即在设定所有要素投入均为0 的极端情况下,调整其他参数的时值,科技监督能力须随时间始终能保持恒定。极值检验结果如图3所示。
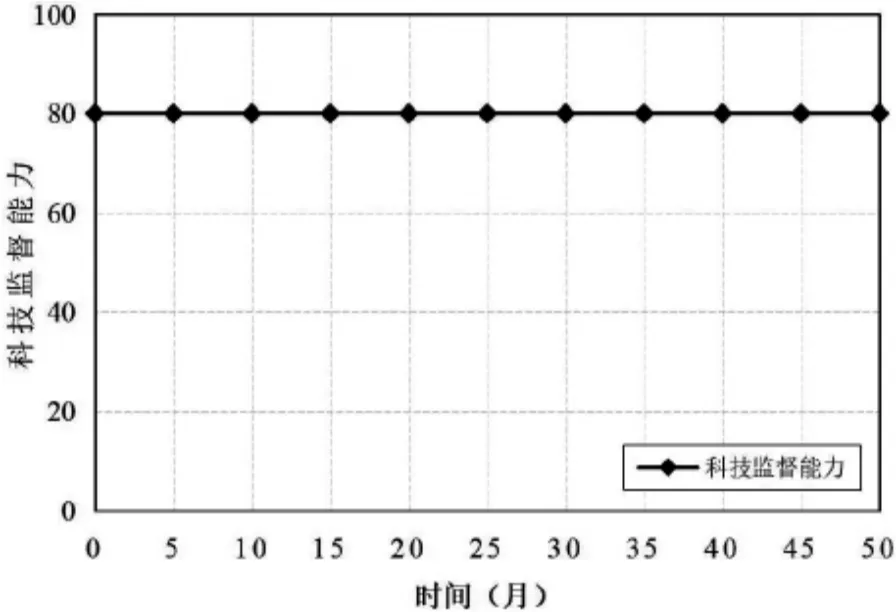
图3 极值检验结果
(四)确定初值
模型中参数和变量初始值等定量化评价数据主要参考以往对创新绩效影响因素的研究,以及德尔菲专家咨询后获得。由于各要素的权重之和恒为1,在实际专家咨询中很难用定量数值来给出准确的要素权重,因此采用三角模糊数标度法[16]通过重要性排序来给关键要素赋初值。具体做法是:首先建立9 级标准度和其倒数的判断矩阵,通过取Delphi 专家咨询法(至少两轮)或问卷调查形式 (问卷的信度系数Cronbach' s Alpha 需大于0.7)的形式判断任意2 个元素的重要性。本文以三角模糊数为基础构造重要性的三角模糊标度见表1。
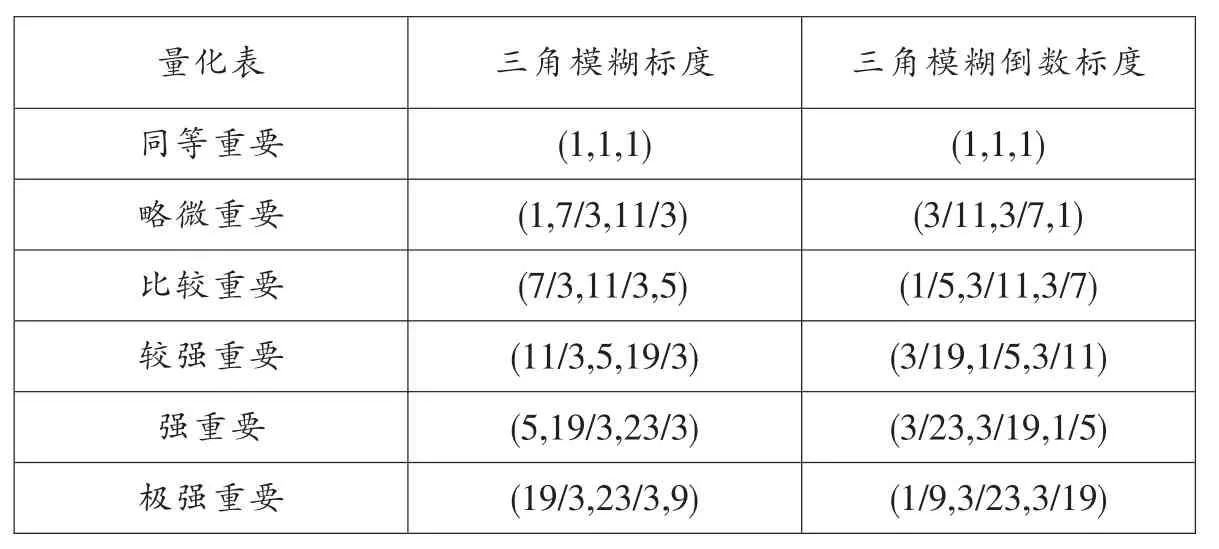
表1 三角模糊数标度及其倒数
基于三角模糊数标度表,构建科技监督能力建设系统关键要素的重要性判断矩阵如表2 所示。
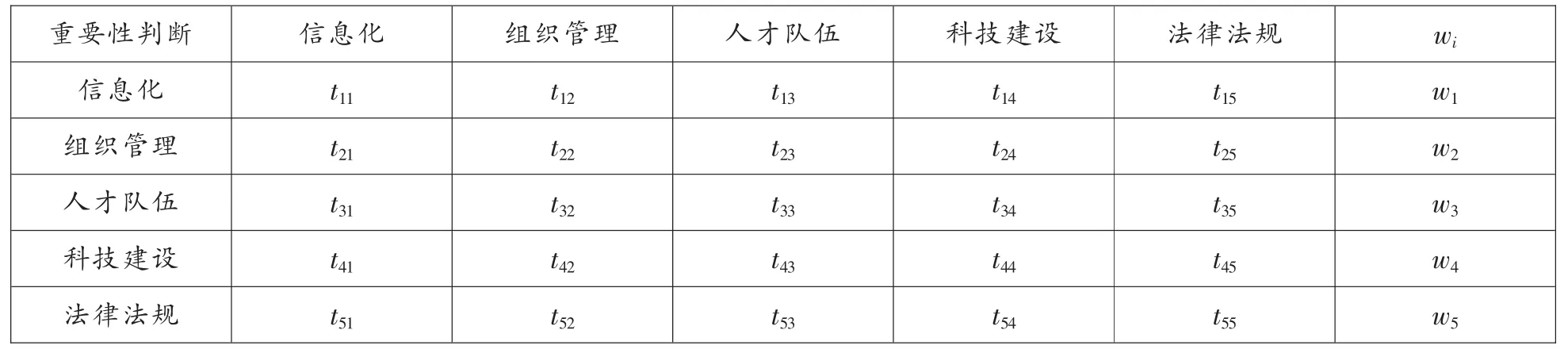
表2 重要性判断
其中tij为各系统要素的重要性标度,特征向量wi的集合矩阵W 用于表征个系统要素的重要性。

邀请科技管理、科技政策类专家对各要素作重要性对比和排序,综合专家的权威性、置信度等条件后按一定权重融合专家结论,得出要素重要性的三角模糊标度R 如下式所示:

上式中R 为专家评分融合后的三角模糊标度;n 为专家数;ri为第 i 个专家的权重;CC(Ei1),CC(Ei2),CC(Ei3)分别为第 i 个专家评判的三角模糊标度的上值、中值和下值。在得到专家三角模糊评价的结果后,采用重心法将专家意见融合并反模糊化,三角模糊标度经融合后转化成一个具体的关联度数值:
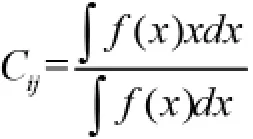
其中:Cij为三角模糊标度构成的三角形的重心,即反模糊化后的重要性数值;f(x)是隶属度函数;x 为研究范围中的任一元素。
通过以上步骤后,用MATLAB 或SPSS 软件处理专家咨询结果,得到系统主要参数变量的初值如表3 所示:
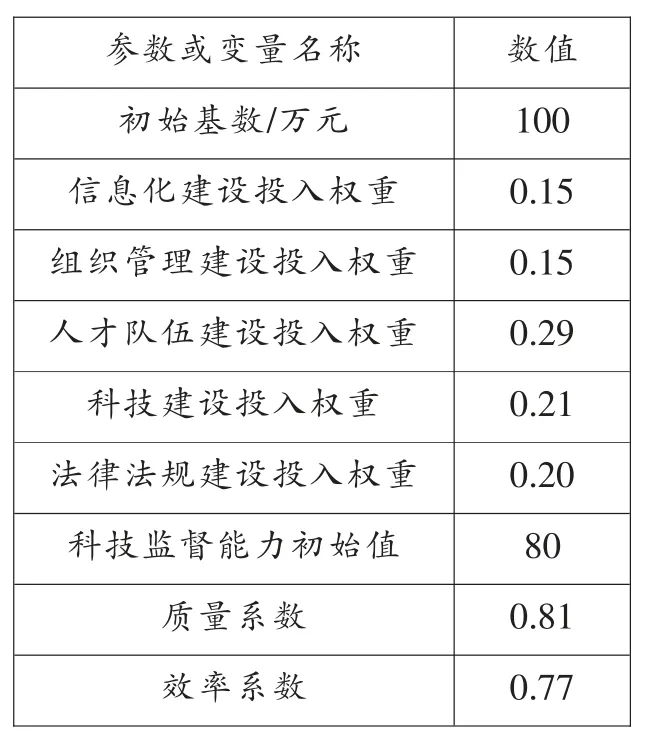
表3 系统主要参数及初始值
(五)仿真模拟
为研究各系统关键要素间的相互作用关系及对系统的影响,同时分析不同的投入策略对监督能力的影响机制。本研究通过改变要素权重来模拟实际决策时的不同策略组合,研究各策略组合下科技监督能力的变化状况。
首先,按照表3 中的变量初值设定系统参数,运行Vensim PLE 仿真软件后得到科技监督能力增量如图4 所示。仿真结果表明,在稳定持续的投入下,科技监督能力增量呈现一定的周期性规律,表现出明显的前期缓慢增长,中期快速增长,中后期增速快速下降以及后期增速缓慢下降的变化特性。本研究将系统呈现的不同阶段定义为起步期、快速增长期、高速增长期、增速下降期和缓速下降期5 个时期。前5 个月为起步期,科技监督能力缓慢增长,表明相对于投入存在一定时间滞后性;在第5 个月左右科技监督能力增量出现快速增长期和高速增长期,表明科技监督能力在各种要素的作用下快速加强;在第31 个月时科技监督能力增量呈现快速下降的趋势直至第45 个月左右保持稳定地缓慢下降,表明科技监督能力增量中后期已出现一定瓶颈。快速下降期和稳定下降期表现出类似经济学中的边际效用递减法则的变化规律,表明当系统运行进入缓速下降后,除非发生重大科技进步、组织模式创新或重大政策调整等要素改变,科技监督能力增量将持续保持在较低水平,持续投入获得的效益将越来越小。
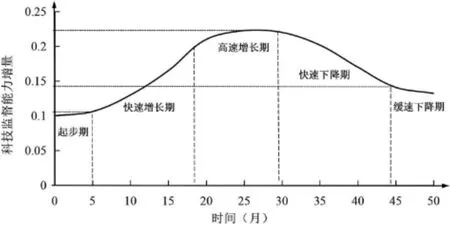
图4 科技监督能力增量
同理,根据其他要素特点设置不同的投入权重进行案例分析,探讨不同策略对科技监督能力建设的影响。本研究设置6 种的要素投入方案,其中方案1为初始方案,方案2 为平均分配方案,方案3/4/5 均为单一投入方案,方案6 为初始方案的优化方案,各投入方案的参数取值见表4。
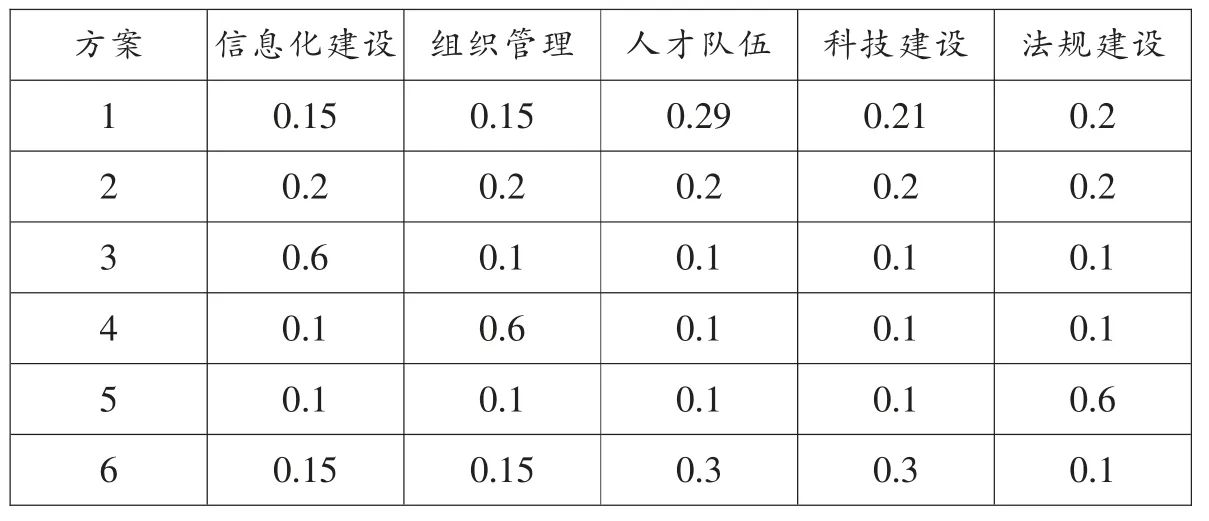
表4 不同要素投入方案的权重值
设定动力学模型的系统仿真总时长为50 个月,时间步长设定为1 个月,得到各要素投入方案下科技监督能力增量和科技监督能力存量随时间变化的模拟结果,如图5 和图6 所示。
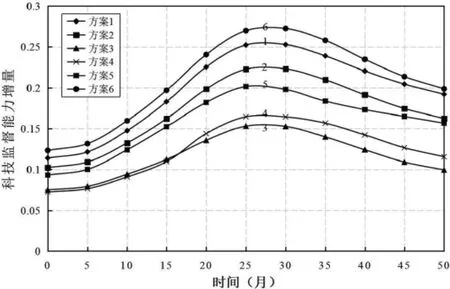
图5 不同方案下的科技监督能力增量随时间变化曲线
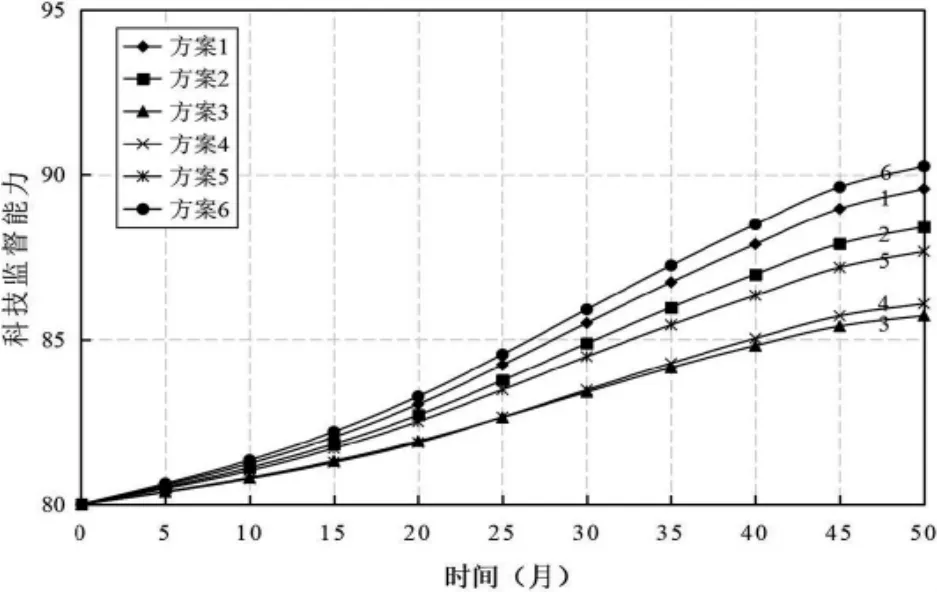
图6 不同方案下的科技监督能力存量随时间变化曲线
仿真结果表明,各方案下的科技监督能力增量表现出类似变化规律,均呈现明显的起步期、快速增长期、高速增长期、增速下降期和缓速下降期5 个阶段,但不同方案下的各阶段的时间和数值有所不同,例如方案4 最早到达增长速率峰值,下降期长于其他方案。
横向对比来看,参加仿真的6 个案例中,方案1(初始投入方案)和方案6(优化方案)的增长效果优于方案3、方案4 和方案5,而方案3、4、5 均为单一要素投入方案,这说明仅加强某一类要素的投入并不能达到显著增强科技监督能力的效果。此外,均等投入的方案2 效果仅处于中游水平,说明简单的完全均衡投入也并非最优方案。在实际应用中,须根据需要合理设置表函数以反映信息化建设、组织管理、团队建设、科技建设、法规建设等要素的实际作用,同时进一步调节各要素投入的权重来得到最佳的科技监督能力增长效果。
四、结论
本文基于系统动力学理论构建科技监督体系动力学模型,开展能力建设影响要素和动力机制研究,并依据各要素间的作用和影响机制构建了因果关系图和流图,最后借助计算机仿真展现了不同要素投入情况下的科技监督能力增长情况。该方法能够为政府优化资源投入,加强科技监督效能提供新思路。
研究结果表明:①科技监督能力提升是多要素共同作用的结果,单一地加强某方面投入或简单的均衡投入均非最优投入方案,在实际决策中需根据滞后特性等要素特点合理调节系统参数,以得到最优的科技监督能力的建设效果;②科技监督能力受要素影响呈现一定周期性变化规律,表现出缓速增长、快速增长、高速增长、增速下降和缓速下降5 个典型运行特性,在实际决策中,可根据系统运行的规律优化投入配置;③动力学系统稳定运行一定时间后,科技监督能力的增长效果表现出符合边际效用递减法则的变化规律,因此在实际决策中还需充分考虑“成本—收益”来配置要素投入并着力防止边际成本过高。
需特别说明的是,随着政府科技创新治理体系的不断完善,科技监督能力建设系统的运行机制可能发生重大变化,此时科技监督能力的影响要素和作用机制也会大大不同。因此在实际应用中须根据现实情境不断优化动力学模型,以更好地反映现实科技监督能力建设系统的运行规律。
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
好日子(2022年3期)2022-06-01
当代水产(2020年4期)2020-06-16
陕西画报(2018年6期)2018-02-25
现代园艺(2017年22期)2018-01-19
河北书画研究(2017年1期)2017-08-22
中国调味品(2017年2期)2017-03-20
山东青年(2016年2期)2016-02-28
中学化学(2015年2期)2015-06-05
理科考试研究·高中(2014年8期)2014-10-17