针对隐匿性病灶的基于3D打印导航模板的曲针穿刺技术的设计及其可行性研究
2022-06-27 06:45聂慧李雯李伟张汝森
中国医疗设备 2022年6期
聂慧,李雯,李伟,张汝森
广州医科大学附属肿瘤医院 a. 保健病区;b. 核医学科,广州 广东 510095
引言
穿刺操作属于临床微创介入基本技术之一,包括穿刺活检[1-2]、粒子植入[3-4]、微波消融[5]等多项微创操作。它们操作中用的穿刺针几乎都是直针,即它们的针杆和在体内的穿刺路径都是直线。但是,当靶病灶位于比较隐蔽的位置,甚至被某些重要组织遮挡时,直线穿刺很难避开遮挡组织实现对病灶的安全穿刺。强制进行直针穿刺很可能造成机体的重大损伤。因此,如何实现对隐蔽性病灶的安全穿刺,是微创医学需要解决的一个难题,这对于拓展穿刺操作的临床适用范围具有重要意义。
既往的文献报道中,一些国内外学者尝试进行曲针穿刺,希望利用弯曲路径绕过遮挡组织而实现对隐匿性病灶的穿刺。例如,在CT引导通过曲针对隐匿病变进行活检[6-8],对肝肺病灶的消融治疗[9-11],进行神经消融或阻滞术[12-13],对椎体进行髓核消融[14]和椎体成形术[15]等。虽然这些研究都取得一定的成果,但是目前临床实践中仍很少见曲针穿刺的应用。因为曲针穿刺存在其固有的缺陷,如无法准确预测路径、手法操作不习惯、穿刺精度差等。这些缺陷如果无法解决,则曲针穿刺很难在临床实践中推广应用。
基于上述原因,本团队创造性地提出一种方法(专利申请号201910513761.X):应用3D打印导航模板辅助曲针穿刺,以提高曲针穿刺的临床可行性,从而实现对隐蔽性病灶的穿刺。目前已在体外模型上进行初步可行性试验,现报道如下。
1 材料与方法
1.1 设计思路
隐匿性病灶穿刺设计思路的原理示意图如图1所示,导航模板辅助曲针穿刺穿刺路径设计示意图如图2所示。本研究为了实现导航模板辅助曲针穿刺,特对曲针的结构进行专门设计。将曲针形态设计为具有单一半径值标准的圆弧形,即整个针体只带有属于同一个半径值的弯曲弧度,不能带有2个及以上不同半径值的弧度,亦不能是带有相同半径值弧度的“S”形。同时导航模板上具有与曲针弧度一致的穿刺通道,有助于稳固维持针道。在对隐蔽性病灶的穿刺操作中,能根据圆弧轨迹准确预测曲针行进路径,并在模板通道的支持下稳定维持针道、避免针道偏移。
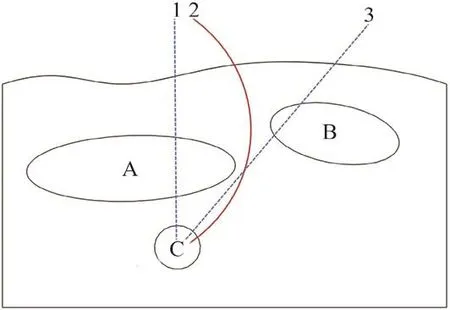
图1 隐匿性病灶穿刺原理示意图
1.2 实验物品
1.2.1 体外模型
在电脑上利用软件(123D Design)设计模型的三维结构(图2~3)。模型内包括病灶区和遮挡区。在软件上适当调整它们的相对位置,预估穿刺路径,使得曲针可以绕过遮挡区穿刺到病灶区,而直针无法直接穿刺到。模型穿刺面被设置为曲面而非平面。确定模型的三维数据后,通过3D打印获得模型树脂外壳,然后填充辐照交联聚乙烯泡沫材料,获得实物模型。
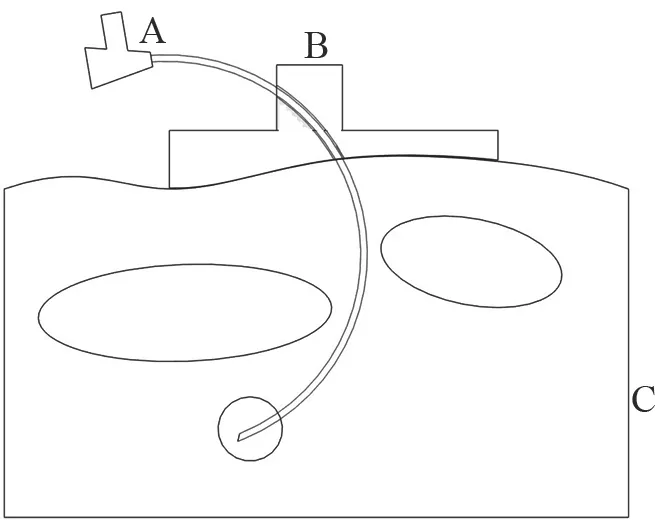
图2 导航模板辅助曲针穿刺路径示意图
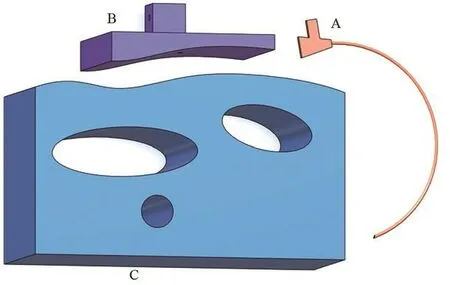
图3 三维结构示意图
1.2.2 穿刺曲针
根据上述模型数据,使用软件设计穿刺曲针的具体形态和数据(图2~3)。穿刺曲针整体形态为标准圆弧形,设置圆弧半径值为60 mm,针管粗直径为3 mm,曲针总长度为150 mm。将穿刺曲针的三维数据导入3D打印机,采用不锈钢材料通过3D打印获得穿刺曲针实物。
1.2.3 3D打印导航模板
根据软件中保存的上述体外模型和穿刺曲针的三维数据,在软件上预设穿刺曲针的行进路径和具体的穿刺位置点,然后在此基础上设计导航模板的具体结构(图2~3)。模板内设置有曲针穿刺通道,通道的弧度及管径必须与穿刺曲针吻合一致。模板的下表面为曲面,与模型的上表面吻合,以利于模板的精确定位。模板的三维结构确定,也是使用树脂材料通过3D打印获得导航模板实物。
1.3 体外模型穿刺操作
共招募10位医师进行体外模型穿刺操作,需提前在穿刺模型上至少完成20次模拟穿刺训练。这些医师按照是否具有2年以上介入穿刺经验平分为2组,A组(经验≥2年)和B组(经验<2年)。穿刺前先对模型进行CT扫描,在CT图像上再次确定模型表面的穿刺进针位置、针尖的角度,以及导航模板的位置,然后进行穿刺操作。按照是否有导航模板的辅助分为2种穿刺模式:单纯曲针穿刺(模式1)和导航模板引导曲针穿刺(模式2)。穿刺过程中可进行1次CT扫描,然后依据CT图像适当调整进针的角度,但不可退针重进。
每位操作者在2种穿刺模式下各进行10次穿刺操作,共计20次穿刺操作。穿刺过程中,操作者不可观看模型侧面,由专人观察模型侧面,记录穿刺结果,以针尖达到病灶区记为穿刺成功,针尖累及遮挡区记为误穿,并记录每次穿刺所需的时间。分别计算每人在2种模式下的成功率、误穿率及平均时间。
对于连续性资料间的比较采用独立样本t检验,以P<0.05为存在显著性差异,所有统计数据应用SPSS 13.0进行分析计算。
2 结果
此实验共进行200次穿刺,最终记录穿刺成功117次,误穿75次,平均时间为(85.7±25.9)s。模式1记录的穿刺成功为30次(A组20次、B组10次),误穿为60次(A组28次、B组32次)。模式2记录的记录的穿刺成功为87次(A组45次、B组42次),误穿为15次(A组6次、B组9次)。各模式及各组的成功率、误穿率及平均时间的关系如表1所示。
2.1 模式间的比较
模式1的成功率30.0%、误穿率60.0%、平均时间(109.7±11.0)s。模式2的成功率87.0%、误穿率15%、平均时间(61.7±3.9)s。
在A组和B组,模式1的成功率均显著小于模式2(t=5.976,P<0.001;t=10.667,P<0.001),模式1的误穿率均显著大于模式2(t=4.400,P=0.002;t=7.273,P<0.0 0 1),模式1的平均时间均显著大于模式2(t=19.478,P<0.001;t=17.961,P<0.001)。
2.2 操作者组间比较
A组的成功率为65.0%、误穿率34.0%、平均时间为(79.9±21.7)s。B组的成功率52.0%、误穿率41.0%、平均时间(91.5 ±29.5)s。
各组的成功率、误穿率及平均时间与模式的关系如表1所示。模式1中A组的成功率显著大于B组(t=2.582,P=0.033),而模式2中A组的成功率仅略大于B组(t=0.885,P=0.402)。在模式1和模式2中,A组的误穿率均略小于 B 组(t=0.756,P=0.471;t=1.134,P=0.290)。 模 式 1中A组的平均时间显著小于B组(t=6.179,P<0.001),而模式2中A组的平均时间仅略小于B组(t=2.085,P=0.071)。
表1 各模式及各组的成功率、误穿率及平均时间比较(±s)

表1 各模式及各组的成功率、误穿率及平均时间比较(±s)
项目A组 B组 t值;P值模式1 模式2 模式1 模式2 A组:模式1vs.模式2模式1:A组vs.B组B组:模式1vs.模式2模式2:A组vs.B组成功率/% 40.0±15.8 90.0±10.0 20.0±7.1 84.0±11.4 5.976;<0.001 10.667;<0.001 2.582;0.033 0.885;0.402误穿率/% 56.0±20.7 12.0±0.8 64.0±11.4 18.0±0.8 4.400;0.002 7.273;<0.001 0.756;0.471 1.134;0.290平均时间/s 100.2±3.7 59.5±2.8 119.1±5.7 63.9±3.8 19.478;<0.001 17.961;<0.001 6.179;<0.001 2.085;0.071
3 讨论
3D打印导航模板技术是介入穿刺领域迅速发展的一项热门技术,各种导航模板的研究设计及专利申请层出不穷。导航模板辅助介入穿刺已经被报道广泛应用于多种临床操作,例如肺结节的穿刺活检[16-17]、125I粒子植入[18-19]和脊柱椎体成形[20]等多种微创介入操作。导航模板不仅能实现与体表的精准吻合定位,还有助于稳固维持针道、减少针道偏移,能显著提高穿刺操作的精确性和准确性,明显改善操作便捷性,减少术中对于影像引导的依赖性。鉴于此,本研究探索通过导航模板辅助曲针穿刺,以解决曲针穿刺固有缺陷,提高其临床操作的可行性。
虽然国内外已经有较多关于曲针穿刺方面的研究,但是这些研究中使用的曲针并不适于导航模板辅助穿刺。因为这些曲针具有如下特点:① 这些曲针仅针杆的尖端部分是弯曲的,而针杆的其余部分仍是直的[6-12];② 这些曲针通常是由研究者将常规穿刺直针的尖端自行手动掰弯所得,并没有经过严格的设计与制作[6-8];③ 部分曲针还具有一定的可变形性,先以直针形式通过引导针鞘进入体内后,再以曲形路径进针[6]。所以,这种部分弯曲、弧度不精确且具有可变形性的曲针,使得操作者术中很难准确预测针道走行,也不适用于导航模板辅助引导。鉴于这些情况,本研究设计使用全弧形针杆,即整个针杆是一个标准的圆弧,并通过精准的3D打印技术保证针杆弧度的精确。这样使得操作者术中可循圆弧轨迹准确预测针道走行。同时导航模板上设置有圆弧通道,其运行轨迹与曲针的轨迹完全重叠,从而使导航模板引导曲针穿刺具有操作上的可行性。而且,这种设计也要求圆弧曲针具有一定的硬度,即常规应力下不发生变形,可以减少曲针应力下的针道偏移,这有助于实现精准引导。
此外,曲针穿刺还存在一些固有缺点:非直线进针使得穿刺的角度很难把握,细微的角度差别即可导致针道路径的明显偏差;针道纠正的阻力较大;曲针的异常形态会造成操作者手感不适;稳固维持针道的难度较大。这些缺点造成曲针在临床实践的可行性差。鉴于此,本研究设计使用基于3D打印的导航模板来解决曲针的这些问题。3D打印导航模板的技术优势主要包括,模板与体表的精准吻合有助于实现穿刺点的精准定位,与曲针弧形一致的穿刺通道便于稳固维持针道及进针,从而提高曲针穿刺的便捷性和精确性。虽然3D打印导航模板是目前介入穿刺领域的热门技术,但是针对隐蔽性病灶开发基于3D打印导航模板的曲针穿刺技术,这在国内外尚未被报道。
本研究结果显示,相对于单纯曲针穿刺,导航模板辅助曲针穿刺的成功率明显增高、误穿率明显降低而且操作时间明显减少。这表明导航模板有助于提高曲针穿刺的精确度、安全性和便捷性。此外,A组的单独曲针穿刺结果明显好于B组,说明单纯曲针穿刺受操作者个人经验的影响比较大。但是在导航模板辅助下,A组和B组的结果没有明显区别,这说明导航模板能帮助提高穿刺结果的稳定性,减少对操作者个人经验的依赖度。
本研究系首次进行基于3D打印导航模板的曲针穿刺技术的概念性研究,所有操作均在体外模型上进行,其有效性和安全性还需在后续动物或临床试验中进一步检验。关于曲针穿刺的应力学特征和组织形变特点的分析,相关技术细节的改进以及与机器人自动化技术的结合,将会是我们接下来深化研究的重要内容。
4 结论
总之,基于3D打印导航模板的曲针穿刺技术,能明显提高曲针穿刺的精确度、安全性和便捷性,且对操作者个人经验的依赖性较低。这项技术有望成为解决临床隐匿性病灶穿刺的一种新方法。其组织应力特征及相关应用技术,值得进一步深入探索与发展。
猜你喜欢
天天爱科学(2022年9期)2022-09-15
当代水产(2022年6期)2022-06-29
影像研究与医学应用(2021年15期)2021-09-12
放射学实践(2021年6期)2021-06-21
中国生殖健康(2020年8期)2021-01-18
科学与财富(2020年28期)2020-12-14
实用心脑肺血管病杂志(2020年1期)2020-03-09
无线互联科技(2018年20期)2018-12-27
医学信息(2018年14期)2018-10-30
海峡姐妹(2015年5期)2015-02-27